以下、図面を参照して、一実施形態に係る文字認識支援装置について説明する。以下の実施形態の構成は例示であり、文字認識支援装置は実施形態の構成には限定されない。
以下、図1から図8の図面に基づいて、文字認識支援装置を説明する。
<実施例1>
図1A、1Bに、実施例1の文字認識支援装置による、認識対象となる帳票の画質評価処理についての説明図を例示する。本実施形態の文字認識支援装置は、例えば、認識対象となる帳票を撮像画像として取得するカメラ機能を備えた情報処理装置である。カメラ機能を備えた情報処理装置として、例えば、スマートフォン、タブレットPC(PC:Personal Computer)、PDA(Personal Data Assistance)、ノートPC等が例示できる。
なお、認識対象の帳票を撮像画像として取得するカメラ機能を備え、撮像画像から文字認識が可能な情報処理装置であれば、例えば、携帯電話、デジタルカメラ、ゲーム機等であってもよい。
本実施形態の文字認識支援装置は、例えば、認識対象の帳票内の所定領域に記述された特定の文字列(文字をも含む)を、該帳票内に記述された文字認識の可否を判断するための評価用文字列とする。評価用文字列として特定される文字列には、例えば、帳票内の記述位置に対応する画像領域内の位置情報(座標情報)、文字列に含まれる文字情報が対応付けて定義される。文字認識支援装置は、例えば、評価用文字列として特定された文字列の記述位置に対応する画像領域内の位置情報(座標情報)、文字情報に基づいて、撮影中の認識対象となる帳票の画像データの画質評価を行う。撮影中の画像データに対する画質評価は、例えば、10ms等の一定の周期間隔で撮像された時系列の画像データ毎に行われる。本実施形態の文字認識支援装置の画質評価では、撮影中の帳票の画像データについて、例えば、帳票内の文字を正しく認識できるための画質であることが判定される。
本実施形態の文字認識支援装置は、例えば、撮影中の帳票画像が含まれる画像領域内の、評価用文字列として特定した文字列が含まれる部分領域に、特定された文字列が読み取り可能な画像データとして撮像されていることを判定する。文字認識装置は、例えば、撮影中の帳票画像が含まれる時系列の撮像画像毎に、上述の評価用文字列として特定された文字列が含まれる部分領域の画像データの読取り可能(文字認識可能)の可否を判定する。
本実施形態の文字認識支援装置は、例えば、画像領域内における部分領域の画像データが読取り可能と判定できる場合には、判定対象となった時系列の撮像画像が、帳票内に記述された文字等の文字認識を行うために十分な画質であると判定する。そして、文字認識支援装置は、例えば、文字認識を行うための十分な画質であると判定した判定対象の撮影中の撮像画像を、帳票内の文字を正しく認識できる認識対象の画像データとして確定する。文字認識支援装置は、例えば、帳票内の文字を正しく認識できる画像データとして確定された認識対象の撮像画像に対し、帳票領域内の画像データの文字認識を行い、文字認識により検出された帳票内の文字列を検出データ文字列として出力する。
図1Aに例示の説明図は、認識対象の帳票として矩形の運転免許証を採用した場合の説明図である。図1Aの説明図において、領域A1は、対象者の免許に係る情報が記述される、運転免許証の全体領域を表す。
金融業界等で口座開設等のための本人確認等に使用される運転免許証、保険証、パスポート等の帳票では、帳票の種別毎に、例えば、帳票内に記述される情報を特定するための項目名といった予め帳票に記述される定型化された文字列パターンが含まれる。また、定型化された文字列パターンを有する帳票では、該文字列パターンが記述される帳票上の記述位置が予め定められている傾向にある。
例えば、図1Aの運転免許証の例では、領域A1には、帳票に記述される情報を表す項目名を表す“氏名”、“住所”、“交付”、“番号”等の定型化された文字列が含まれる。定型化された文字列は、文字列となる文字情報(単語等)を含み、予め定められた帳票上の位置領域に記述される。なお、領域A1には、上述した文字列の他に、生誕日を表す“日生”といった定型化された文字列や単位を表す“号”といった文字が含まれる。
例えば、図1Aの運転免許証の例では、“氏名”といった文字列は、領域A1の左上端部の領域A11に記述され、“日生”といった文字列は、領域A1の右上端部の領域A12に記述されている。また、図1Aの運転免許証の例において、“番号”といった文字列は、例えば、領域A1の左下端部の領域A13に記述され、“号”といった文字は、領域A1の中央下側の領域A14に記述されている。
平面視状態での領域A11,領域A12は、文字列が記述される左右方向に(矩形の長手方向に平行な方向)略同じ高さ位置に配置されている。また、領域A13,領域A14は、文字列が記述される左右方向に略同じ高さ位置に配置されている。そして、領域A11,領域A13は、文字列が記述される方向に直交する上下方向(矩形の短手方向に平行な方向)に略同じ幅位置に配置されている。
図1Aに例示のように、認識対象となる帳票内では、帳票内に記述される文字列の文字情報と文字列の記述位置が予め定められることとなる。例えば、“氏名”といった文字列は、“氏”および“名”という文字情報を含み、帳票の左上端部の領域A11に記述される。また、例えば、“番号”といった文字列は、“番”および“号”という文字情報を含み、帳票の左下端部の領域A13に記述される。
例えば、複数の、帳票内の記述位置が予め定められた文字列の記述領域に対応する撮像画像の部分領域を、帳票撮像時の位置基準として採用することにより、撮影中の画像領域内における帳票の位置決めを行うことが可能となる。例えば、帳票等の平面体を撮像する場合、平面上の3箇所の位置を特定することで、撮像対象となる平面体の幾何学的な置かれ方は一意に決定することができる。
なお、撮影対象となる帳票等が矩形の平面体である場合、例えば、特定する平面上の3箇所の位置として帳票等の4隅の内、少なくとも3隅部分を含む3箇所の領域を採用することができる。撮影対象となる帳票等の4隅の内、少なくとも3隅部分を含む3箇所の領域に記述された文字・文字列等が認識される場合には、帳票の全体領域に対して撮像時の、カメラ等の焦点が合っていると判断できるからである。
つまり、矩形の平面体である帳票の3隅部分を含む3箇所の領域に記述された文字列を評価用文字列として採用し、各文字列に含まれる文字情報の認識評価を行うことで、撮影対象となる帳票全体の合焦状態の判定が可能となる。合焦状態で撮影された帳票の画像データは、帳票内の文字を正しく認識できるための画質を有することとなる。撮影対象となる矩形の帳票に対し、3隅部分を含む3箇所以上の領域に記述された文字列(評価用文字列)の認識評価を行うことにより、適正な撮影対象の位置決め、及び、撮影対象の合焦を同時に行うことが可能となる。
図1Aの例では、例えば、帳票の4隅の内、左上端部の領域A11に記述された“氏名”、右上端部の領域A12に記述された“日生”、左下端部の領域A13に記述された“番号”等の文字列が評価用文字列として採用される。各文字列の記述領域である領域A11,A12,A13に対応する撮像画像の部分領域が、帳票撮像時の位置決めの位置基準となる。そして、例えば、帳票撮像時に、撮影中の画像領域内の、領域A11,A12,A13に対応する部分領域の、“氏名”,“日生”,“番号”といった評価用文字列の文字認識の評価を行うことで、帳票の位置決めの適正さ、帳票全体の合焦状態の判定が可能となる。
図1Bに、画像領域内における図1Aに例示の運転免許証の撮像画像の説明図を例示する。図1Bの画像例において、画像領域Z0は、カメラ機能を備えた文字認識支援装置の画像領域を表し、画像領域Z0には、撮像対象となる帳票の撮像画像(画像データ)の部分領域Z1が含まれる。
図1Bに例示の撮像画像は、例えば、撮影対象となる帳票の位置決めが適正に行われた場合の画像例である。帳票の適正な位置決めとして、例えば、図1Bのように、帳票の撮像画像の部分領域Z1の縁辺Z1a−Z1dと文字認識支援装置の画像領域Z0の縁辺Z0a−Z0dとが、それぞれ平行となり、且つ、部分領域Z1と画像領域Z0との中心位置が重畳する状態が例示できる。なお、撮像された帳票の撮像画像の領域Z1の画像サイズは、例えば、帳票内に記述された文字を正しく読取り(文字認識)できる大きさである。
図1Bに例示のように、撮影対象となる帳票の位置決めが適正に行われた場合では、画像領域Z0には、例えば、図1Aに例示の領域A11,A12,A13,A14のそれぞれに対応する部分領域Z11,Z12,Z13,Z14が含まれることとなる。部分領域Z11は、図1Aの帳票例での文字列“氏名”が記述された領域A11に対応する画像の領域であり、同様に、部分領域Z12は、文字列“日生”が記述された領域A12に対応する画像の領域である。また、部分領域Z13は、図1Aの帳票例での文字列“番号”が記述された領域A13に対応する画像の領域であり、同様に、部分領域Z14は、文字“
号”が記述された領域A14に対応する画像の領域である。
部分領域Z11では、例えば、領域A11で記述された文字列“氏名”に含まれる“氏”および“名”といった文字情報が認識可能となる。同様に、例えば、部分領域Z12では、領域A12で記述された文字列“日生”に含まれる“日”および“生”といった文字情報が認識可能となる。また、部分領域Z13では、領域A13で記述された文字列“番号”に含まれる“番”および“号”といった文字情報が認識可能となり、部分領域Z14では、領域A14で記述された文字“号”といった文字情報が認識可能となる。
このように、撮影対象となる帳票の位置決めが適正に行われ、帳票内に記述された文字が正しく認識できる合焦状態では、画像領域Z0には、評価用文字列として採用した帳票内の文字列を認識可能な部分領域が複数に含まれることとなる。そして、画像領域Z0内での各部分領域は、評価用文字列として採用した文字列の帳票内の記述位置(領域)に対応する所定の画像領域に位置することとなる。
従って、予め撮影対象の帳票に対する画像領域Z0内の各部分領域の座標を位置決めのための位置基準として特定し、特定した各部分領域の画像データについて文字認識を行うことにより、帳票の位置決めの適正さ、帳票全体の合焦状態の同時判定が可能となる。
例えば、撮影対象となる帳票の適正な撮影位置に対する画像領域Z0内の各部分領域の位置情報(座標情報)を予め実験的に特定し、特定した画像領域Z0内の各部分領域の位置情報をデータベース(DB:Data Base、以下“DB”と称す)として保持する。ここで、適正な撮影位置とは、例えば、画像領域Z0内の撮像された帳票の画像と画像領域Z0との関係が、図1Bで説明した関係を有する場合をいう。
画像領域Z0内の各部分領域の位置情報は、例えば、画像領域Z0内での2次元の座標情報として表すことができる。例えば、図1Bの例では、画像領域Z0における上下方向をY軸方向とし、左右方向をX軸方向とし、評価用文字列に対応する部分領域の左上の画素位置、及び右下の画素位置を指定することができる。なお、部分領域の位置情報は、評価用文字列に含まれる文字毎に指定するとしてもよい。また、DBに保持される画像領域Z0内の各部分領域の位置情報には、例えば、撮影対象となる帳票において評価用文字列として採用された文字列の文字情報が対応付けられる。
そして、帳票の撮影時に、例えば、DBに保持された各部分領域の位置情報および文字列の文字情報を参照し、受け付けた撮影中の撮像画像に対して部分領域毎の文字認識を行う。部分領域毎の文字認識は、各部分領域の位置情報に対応付けられた、帳票内の評価用文字列に含まれる文字情報により行う。
受け付けた撮影中の撮像画像に対して、3箇所以上の部分領域に対応する文字・文字列の文字認識の評価を行うことで、撮影対象となる帳票の位置決めの適正さ、帳票内の文字を正しく認識するための画質を判定することが可能となる。
なお、図1A、1Bでは、定型化された文字・文字列を評価用文字列として採用したが、評価用文字列は、例えば、撮影対象となる帳票毎に、4隅の部分領域に記述された文字・文字列から特定するとしてもよい。
例えば、撮影対象となる帳票のサイズが共通する場合では、撮影対象となる帳票の適正な撮影位置に対する画像領域Z0内の各部分領域の位置情報(座標情報)を共有することが可能である。帳票撮影前に、サイズが共通する帳票毎に適正な撮影位置に対する、4隅の評価文字列が記述された、画像領域Z0内の各部分領域の位置情報を指定することが可
能である。
例えば、帳票撮影前に、帳票のサイズに応じた画像領域内の部分領域Z11−Z14に対応する帳票内の領域A11−A14を特定する。そして、特定された帳票内の領域A11−A14に記述された文字・文字列を評価用文字列として採用し、メモリ等に一時的に記憶する。そして、記憶された文字・文字列と、サイズが共通する帳票毎の各部分領域の位置情報に基づいて、3箇所以上の部分領域での文字認識の評価を行い、撮影対象となる帳票の位置決めの適正さ、帳票内の文字を正しく認識するための画質を判定するとすればよい。撮影対象となる帳票のサイズ毎に、撮影時の位置決めの適正さ、帳票内の文字を正しく認識するための画質を判定できる。
また、3箇所以上の部分領域の内、1箇所、または、2箇所の部分領域の文字・文字列が正しく認識できた場合には、例えば、撮影中の帳票画像が表示されるLCD等の表示画面に重畳して、認識された部分領域を提示するとしてもよい。撮影中の帳票画像に対し、部分的に認識された部分領域を提示することにより、撮影中の帳票に対する位置決めのためのカメラ等の傾き、動かし方等を補佐することができる。
なお、図1A、1Bの説明では4隅の領域としたが、本実施形態の文字認識装置の処理が、4隅に限定されるわけではない。例えば、矩形の帳票の撮像画像においては、4隅に相当する領域の画質が最も劣化し易く、言い換えれば、4隅に相当する領域の画質が文字認識可能な画質の場合には、帳票の撮像画像全体が文字認識可能な画質である傾向にある。
しかし、例えば、3隅以上の領域を選択する場合には、文字のサイズ、寸法、帳票内の配置位置に応じて、4隅の中から対象となる領域を適宜、選択することができる。但し、評価の対象となる文字列位置は、帳票画像内に分散されることが望ましく、相互に近接しないことが望ましい。
〔装置構成〕
図2に、本実施形態の文字認識支援装置10のハードウェアの構成の一例を例示する。図2に例示する文字認識支援装置10は、いわゆる一般的なコンピュータの構成を有している。図2に例示の、文字認識支援装置10は、接続バスB1によって相互に接続されたCPU(Central Processing Unit)11、主記憶部12、補助記憶部13、入力部14
、出力部15、通信部16を有する。主記憶部12及び補助記憶部13は、文字認識支援装置10が読み取り可能な記録媒体である。
文字認識支援装置10は、CPU11が補助記憶部13に記憶されたプログラムを主記憶部12の作業領域に実行可能に展開し、プログラムの実行を通じて周辺機器の制御を行う。これにより、文字認識支援装置10は、所定の目的に合致した機能を実現することができる。
図2に例示の文字認識支援装置10では、CPU11は、文字認識支援装置10全体の制御を行う中央処理演算装置である。CPU11は、補助記憶部13に格納されたプログラムに従って処理を行う。主記憶部12は、CPU11がプログラムやデータをキャッシュしたり、作業領域を展開したりする記憶媒体である。主記憶部12は、例えば、RAM(Random Access Memory)やROM(Read Only Memory)を含む。
補助記憶部13は、各種のプログラム及び各種のデータを読み書き自在に記録媒体に格納する。補助記憶部13は、外部記憶装置とも呼ばれる。補助記憶部13には、オペレーティングシステム(Operating System :OS)、各種プログラム、各種テーブル等が格納
される。OSは、通信部16を介して接続される外部装置等とのデータの受け渡しを行う通信インターフェースプログラムを含む。外部装置等には、例えば、接続されたネットワーク上の、他の情報処理装置、外部記憶装置等が含まれる。
補助記憶部13は、例えば、EPROM(Erasable Programmable ROM)、ソリッドス
テートドライブ装置、ハードディスクドライブ(HDD、Hard Disk Drive)装置等であ
る。また、補助記憶部13としては、例えば、CDドライブ装置、DVDドライブ装置、BD(Blu-ray(登録商標) Disc)ドライブ装置等が提示できる。記録媒体としては、例えば、不揮発性半導体メモリ(フラッシュメモリ)を含むシリコンディスク、ハードディスク、CD、DVD、BD、USB(Universal Serial Bus)メモリ、メモリカード等がある。
入力部14は、ユーザ等からの操作指示等を受け付ける。入力部14は、入力ボタン、キーボード、タッチパネル等のポインティングデバイス、ワイヤレスリモコン、マイクロフォン等の入力デバイスである。また、入力部14には、カメラ14a等の撮影対象となる帳票の画像情報を取得する入力デバイスが含まれる。入力部14から入力された情報は、接続バスB1を介してCPU11に通知される。
出力部15は、CPU11で処理されるデータや主記憶部12に記憶されるデータを出力する。出力部15は、CRT(Cathode Ray Tube)ディスプレイ、LCD(Liquid Crystal Display)15a、PDP(Plasma Display Panel)、EL(Electroluminescence
)パネル、有機ELパネル、プリンタ、スピーカ等の出力デバイスである。通信部16は、例えば、ネットワーク等とのインターフェースである。
文字認識支援装置10は、例えば、CPU11が補助記憶部13に記憶されているOS、各種プログラムや各種データを主記憶部12に読み出して実行することにより、対象プログラムの実行と共に、図2に例示のが各処理手段を実現する。文字認識支援装置10は、対象プログラムの実行と共に、図2に例示の画質評価部101、検出データ処理部102を実現する。但し、図2に例示の各処理手段のいずれか、あるいは、これらの一部がハードウェア回路によって動作するものであってもよい。なお、文字認識支援装置10は、以上の各処理手段が参照し、或いは、管理するデータの格納先として、例えば、評価用文字列DB201を記憶部13に備える。
図2に例示の各処理手段のうち、いずれかが、他の情報処理装置等に含まれてもよい。例えば、画質評価部101を含む情報処理装置と、検出データ処理部102を含む情報処理装置と、外部記憶装置に格納された評価用文字列DB201がネットワークを介して接続し、文字認識支援装置10として機能するとしてもよい。文字認識支援装置10は、例えば、ネットワークN上のコンピュータ群であるクラウドとして実現できる。
〔処理ブロック構成〕
図2に例示の説明図において、文字認識支援装置10は、CPU11が実行する画質評価部101、検出データ処理部102の各処理手段を有する。また、文字認識支援装置10は、以上の各処理手段が参照し、或いは、管理するデータの格納先として、例えば、評価用文字列DB201を補助記憶部13に備える。
画質評価部101は、例えば、評価用文字列DB201に登録された評価用文字列に基づいて、撮影中の帳票の撮像画像(画像データ)について、帳票内に記述された文字を正しく認識できる画質であるかの画質評価を行う。
文字認識支援装置10は、例えば、入力部14のカメラ14a等を介して撮影中の帳票
の撮像画像を受け付ける。撮影中の撮像画像の画像データは、例えば、10msといった一定の周期間隔の時系列で文字認識装置10に受け付けられ、主記憶部12のバッファメモリ等に一時的に記憶される。バッファメモリ等に記憶された撮影中の撮像画像の画像データは、時系列順に読み出され、例えば、文字認識支援装置10のLCD15a等の表示画面に、撮影中の帳票の撮影状態を表すモニタ画像として表示される。文字認識支援装置10では、例えば、LCD15a等の表示画面に表示された撮影中の撮像画像を参照した利用者の操作により、撮影対象の帳票の位置決め、シャッター操作等が行われる。LCD15a等に表示された撮影中の帳票の撮像画像は、例えば、利用者のシャッター操作により確定される。
画質評価部101は、例えば、評価用文字列に対応付けられた各部分領域の位置情報(座標情報)を参照し、バッファメモり等に記憶された撮影中の帳票の画像データの、各部分領域を特定する。そして、画質評価部101は、例えば、特定された各部分領域の画像データについて、登録された評価用文字列の文字情報に基づいて文字認識を行う。文字認識は、例えば、評価用文字列に含まれる文字の文字情報とのパターンマッチング等の照合により行われる。登録された評価用文字列の文字情報に基づく文字認識は、部分領域毎に行われる。
画質評価部101は、例えば、各部分領域の文字認識の結果、全ての部分領域、或いは、所定数以上の部分領域で評価用文字列の文字情報の文字認識ができた場合には、撮影中の評価対象となる撮像画像が十分な画質であると判定する。画質評価部101は、例えば、撮影中の評価対象となる撮像画像が、帳票内に記述された文字等の文字認識を行うために十分な画質であると判定する。
画質評価部101は、例えば、撮影中の撮像画像が帳票内に記述された文字等の文字認識を行うために十分な画質であると判定する場合には、例えば、撮像画像の画像データを主記憶部12の所定の領域に一時的に記憶する。画質評価部101により、文字認識を行うために十分な画質であると判定された撮像画像は、例えば、検出データ処理部102に引き渡される。
検出データ処理部102は、例えば、画質評価部101から引き渡された撮像画像に基づいて、帳票の画像データ領域の文字認識を行い、文字認識により検出された帳票内の文字列を検出データ文字列として出力する。文字認識により検出された帳票内の文字列は、例えば、文字認識支援装置10の備える出力部15に出力される。
なお、画質評価部101は、例えば、各部分領域の文字認識において、評価用文字列に含まれる認識文字の一致の度合いを表す評価値によって、撮影中の撮像画像の画質を評価するとしてもよい。
例えば、図1Aの領域A11の文字列“氏名”において、“名”との文字については、“名”と認識する文字候補、“タ”と認識する文字候補、“口”と認識する文字候補が想定される。例えば、部分領域での文字認識の結果、文字候補“名”の評価値、文字候補“タ”の評価値、文字候補“口”の評価値がそれぞれに得られた場合、真の文字“名”に対する確信度を以下の数式(1)で表すことができる。
数式(1)で求められる確信度は、例えば、認識対象となる文字が文字候補として採用された文字であるか否かを示す指標である。
確信度=(最も高い文字候補の評価値)/(2番目に高い文字候補の評価値)…数式(1)
例えば、認識対象となる文字と候補文字との一致の度合いを表す評価値が“0−100”の範囲で求められる場合、最も高い文字候補の評価値が“100”,2番目に高い文字候補の評価値が“30”として求められたと想定する。このときの確信度は、数式(1)より、“(100)/(30)=3.3”と求められる。確信度が“3.3”として得られた場合には、例えば、最も高い文字候補の認識結果が2番目に高い文字候補の認識結果よりも3倍以上も大きいことを示しており、2番目に評価値の高い文字候補が採用される確率は相対的に小さいことを示している。
従って、数式(1)で求められる確信度に対し、閾値:Thを設定し、例えば、“確信度≧Th”との関係を満たす場合に、撮影中の評価対象となる撮像画像が帳票内に記述された文字等の文字認識を行うために十分な画質であると判定するとしてもよい。
〔データベース構成〕
図3に、評価用文字列DB201に登録されるデータの一例を例示する。図3に例示の評価用文字列のデータは、例えば、図1Aに例示の運転免許証を認識対象の帳票とした場合の例である。図1Aで説明したように、帳票内の4隅の領域A1−A4に記述される文字列である、“氏名”、“日生”、“番号”、“号”が評価用文字列として採用されている。評価用文字列DB201には、例えば、文字認識の対象となる帳票毎に、図3に例示の評価用文字列のデータが登録される。
図3に例示の評価用文字列DB201は、「No」、「Char#」、「char」、「sx」、「sy」、「ex」、「ey」、「文字」の各カラムを有する。評価用文字列DB201は「No」毎のレコードを有し、「No」毎のレコードは、さらに評価用文字列に含まれる文字毎のサブレコードを有する。
「No」カラムには、評価用文字列が記述された帳票内の領域A1−A4に対応する撮像画像内の画像領域での部分領域を一意に識別する識別番号が格納される。「Char#」カラムには、評価用文字列に含まれる文字の個数が格納される。「char」カラムには、評価用文字列に含まれる文字の識別番号が格納される。
「sx」カラムには、評価用文字列に含まれる文字の画像領域内の左上画素の位置を示す左右方向の座標情報が格納される。「sy」カラムには、評価用文字列に含まれる文字の画像領域内の左上画素の位置を示す上下方向の座標情報が格納される。「ex」カラムには、評価用文字列に含まれる文字の画像領域内の右下画素の位置を示す左右方向の座標情報が格納される。「ey」カラムには、評価用文字列に含まれる文字の画像領域内の右下画素の位置を示す上下方向の座標情報が格納される。「文字」カラムには、評価用文字列に含まれる単語等の文字情報が含まれる。
図3に例示の評価用文字列DB201において、例えば、図1Aに例示の、左上端部の領域A11に記述された評価用文字列“氏名”は、「No」カラムに“0”が格納された部分領域のレコードに対応付けられている。評価用文字列“氏名”に含まれる文字情報は、“氏”および“名”であるため、「Char#」カラムには文字の個数である“2”が格納されている。評価用文字列“氏名”に対応する部分領域のレコードは、「Char#」カラムに格納された文字個数に対応するサブレコードを有する。評価用文字列“氏名”に対応する部分領域のレコードは、「char」カラムに“0”、“1”が格納されたサブレコードを有する。
例えば、帳票等に記述される評価用文字列“氏名”は、左側から順に“氏”,“名”と記述される。評価用文字列DB201では、例えば、評価用文字列の左側から順に「char」カラムに格納される識別番号が付与される。図3の例では、評価用文字列の“氏”に対応するサブレコードの「char」カラムには“0”が格納され、評価用文字列の“
名”に対応するサブレコードの「char」カラムには“1”が格納される。
評価用文字列の“氏”に対応するサブレコードの「sx」、「sy」、「ex」、「ey」カラムには、それぞれに、評価用文字列の“氏”に対応する画像領域内の部分領域の位置情報を示す座標が格納される。例えば、「sx」カラムには、“氏”に対応する部分領域の左上画素の位置を示す左右方向の座標情報“10”が格納されている。例えば、「sy」カラムには、“氏”に対応する部分領域の左上画素の位置を示す上下方向の座標情報“10”が格納されている。また、例えば、「ex」カラムには、“氏”に対応する部分領域の右下画素の位置を示す左右方向の座標情報“20”が格納されている。例えば、「ey」カラムには、“氏”に対応する部分領域の右下画素の位置を示す上下方向の座標情報“20”が格納されている。
評価用文字列の“名”についても同様にして、評価用文字列の“名”に対応する画像領域内の部分領域の位置情報を示す座標が、サブレコードの「sx」、「sy」、「ex」、「ey」カラムに格納される。例えば、「sx」カラムには、“名”に対応する部分領域の左上画素の位置を示す左右方向の座標情報“20”が格納されている。例えば、「sy」カラムには、“名”に対応する部分領域の左上画素の位置を示す上下方向の座標情報“10”が格納されている。また、例えば、「ex」カラムには、“名”に対応する部分領域の右下画素の位置を示す左右方向の座標情報“30”が格納されている。例えば、「ey」カラムには、“名”に対応する部分領域の右下画素の位置を示す上下方向の座標情報“20”が格納されている。
評価用文字列としての“氏名”は、帳票内では同一の記述行に記述される。このため、評価用文字列DB201の登録時には、帳票内で同一の記述行に記述される評価用文字列は、それぞれの文字に対応する部分領域の上下方向の画素位置を示す座標情報は同じ座標値が格納されることとなる。
図3の例では、例えば、「No」カラムに“0”、“1”が格納されたレコードの「sy」カラムには同一の座標値である“10”が格納され、「ey」カラムには同一の座標値である“20”が格納されている。また、例えば、「No」カラムに“2”、“3”が格納されたレコードの「sy」カラムには同一の座標値である“100”が格納され、「ey」カラムには同一の座標値である“110”が格納されている。「No」カラムに“0”が格納されたレコードの評価用文字列と、“1”が格納されたレコードの評価用文字列とは、文字認識の対象となる帳票において、同一の記述行に記載されていることがわかる。同様に、「No」カラムに“2”が格納されたレコードの評価用文字列と、“3”が格納されたレコードの評価用文字列とは、文字認識の対象となる帳票において、同一の記述行に記載されていることがわかる。
なお、図3の例では、評価用文字列DB201には、帳票内の4隅の領域の文字列に対応付けられた部分領域の評価用文字列のデータが登録されるとして説明した。図1Bで説明したように、画像領域内での撮像画像の位置決めは3箇所以上の部分領域の特定により可能である。このため、評価用文字列DB201に登録される評価用文字列のデータ数は、帳票内の4隅の内、任意に選択した3隅のデータを登録するとしてもよい。例えば、図3の例では、評価用文字列として採用された“氏名”、“日生”、“番号”、“号”の内、複数の文字を含む“氏名”、“日生”、“番号”を選択し、評価用文字列DB201に登録するとしてもよい。
また、評価用文字列DB201に登録される部分領域の位置情報(座標情報)は、あそび領域(マージン領域)を含むように設定されるとしてもよい。評価用文字列DB201に登録される部分領域の位置情報に余裕を持たせることにより、例えば、微細(数画素)
な位置ズレを含む文字を認識することが可能となる。
〔処理フロー〕
以下、図4A−4Cに例示のフローチャートを参照し、本実施形態の文字認識支援装置10の文字認識処理を説明する。図4Aは、文字認識処理の全体処理を示すフローチャートの例示である。図4Aに例示のフローチャートにおいて、文字認識処理の開始は、例えば、文字認識処理の対象となる帳票の、撮像画像の受け付けのときが例示できる。
文字認支援識装置10は、例えば、入力部14のカメラ14a等を介して撮影中の帳票の撮像画像を受け付ける。文字認識支援装置10は、例えば、10msといった一定の周期間隔の時系列で撮影中の撮像画像の画像データを受け付ける。受け付けられた撮影中の撮像画像の画像データは、時系列順に主記憶部12のバッファメモリ等に一時的に記憶される。バッファメモリ等に記憶された撮影中の撮像画像の画像データは、時系列順に読み出され、例えば、文字認識支援装置10のLCD15a等の表示画面に、撮影中の帳票の撮影状態を表すモニタ画像として表示される。文字認識支援装置10は、例えば、時系列順にバッファメモリ等から読み出された撮影中の撮像画像の画像データに対し、図4Aに例示の文字認識処理を行う。
図4Aに例示のフローチャートにおいて、文字認識支援装置10は、例えば、バッファメモリ等から読み出された撮影中の撮像画像の画像データについて画質評価処理を行う(S1)。画質評価処理は、例えば、評価用文字列DB201に登録された撮影中の帳票の評価用文字列のデータ(画質評価用文字列テーブルとも称す)に基づいて行われる。画質評価処理では、例えば、撮影中の撮像画像の画像データが画像領域内において適正な位置に位置決めが行われ、且つ、撮影中の撮像画像の画像データが帳票内の文字を正しく認識するための十分な画質であるかが判定される。文字認識支援装置10は、例えば、S1の画質評価処理の判定結果をS2の処理に引き渡す。なお、S1の画質評価処理は、図4B,4Cで説明する。
文字認識支援装置10は、例えば、S1の画質評価処理から引き渡された判定結果に基づいて、処理中の撮像画像の画像データが帳票内の文字を正しく認識するための十分な画質を有するか否かを判定する(S2)。処理中の撮像画像の画像データに対する十分な画質であるか否かの判定は、例えば、処理中の撮像画像の画像データに付加されたフラグ情報により行われる。
文字認識支援装置10は、例えば、処理中の撮像画像の画像データに、フラグ値“1”のフラグ情報が付加されている場合には(S2,“Y”)、S3の処理に移行する。S3の処理では、文字認識支援装置10は、例えば、処理中の撮像画像の画像データを主記憶部12の所定の領域に一時的に記憶する。そして、文字認識支援装置10は、例えば、撮像画像の帳票が撮像された、図1Bに例示の画像領域Z1のデータ領域について文字認識を行う。画像領域Z1内のデータ領域の文字認識は、例えば、検出データ処理部102により行われる。文字認識支援装置10は、例えば、文字認識により検出された帳票内の文字情報を検出データ文字列として、文字認識支援装置10の出力部15に出力し、処理中の撮像画像に対する文字認識処理を終了する。
一方、文字認識支援装置10は、例えば、処理中の撮影画像の画像データに、フラグ値“1”のフラグ情報が付加されていない場合には(S2,“N”)、S3の処理をスキップし、処理中の撮像画像に対する文字認識処理を終了する。文字認識支援装置10は、例えば、時系列順にバッファメモリ等から読み出された次の撮影中の撮像画像の画像データを対象として文字認識処理を継続する。文字認識処理は、例えば、帳票内に記述された文字認識が行われるまで繰り返し実行される。
次に、図4Bに例示のフローチャートを参照し、図4Aに例示のS1の画質評価処理の詳細を説明する。図4Bに例示にフローチャートにおいて、文字認識支援装置10は、例えば、処理中の撮像画像の画像データに対し、“画質フラグ”を“0”とするフラグ情報を付与する(S11)。フラグ情報は、例えば、2値状態を“0”、“1”等の単一ビットで識別する情報である。S11の処理では、文字認識支援装置10は、処理中の撮像画像の画像データに対し、初期値として“画質フラグ”を“0”とするフラグ情報の設定を行う。
S12の処理では、文字認識支援装置10は、例えば、評価用文字列DB201を参照し、撮影中の帳票に対応する評価用文字列のデータ(画質評価用文字列テーブル)の読み込みを行う。読み込まれた評価用文字列のデータは、例えば、主記憶部12の所定の領域に一時的に記憶される。
S13の処理では、文字認識支援装置10は、例えば、S12の処理で読み込んだ評価用文字列のデータに基づいて、処理中の撮像画像の部分領域についての文字認識を行う。
文字認識支援装置10は、例えば、評価用文字列に対応付けられた各部分領域の座標情報から、画像領域内の評価用文字列に対応する座標領域を特定する。そして、文字認識支援装置10は、例えば、特定した座標領域の画像データについて、該座標領域と対応付けられた文字とのパターンマッチング等の照合により文字認識を行う。文字認識支援装置10は、例えば、文字認識処理の対象となる帳票の、3隅以上の記述領域に対応する画像領域内の各部分領域について、評価用文字列に含まれる文字毎に文字認識を実行する。
S14の処理では、文字認識支援装置10は、例えば、処理中の画像領域内における帳票の3隅以上の記述領域に対応する各部分領域について、評価用文字列に含まれる全ての文字が認識できたかを判定する。
文字認識支援装置10は、例えば、帳票の3隅以上の記述領域に対応する各部分領域について、評価用文字列に含まれる全ての文字が認識できた場合には(S14,“Y”)、S15の処理に移行する。S15の処理では、文字認識支援装置10は、例えば、処理中の撮像画像の画像データに対し、帳票内の文字を正しく認識するための十分な画質であると判断し、S11の処理で付与された“画質フラグ”のフラグ値に“1”を設定する。処理中の撮像画像の画像データに対し、“画質フラグ”のフラグ値に“1”を設定した文字認識支援装置10は、処理中の画質評価処理を終了する。
一方、文字認識支援装置10は、例えば、帳票の3隅以上の記述領域に対応する各部分領域について、評価用文字列に含まれる全ての文字が認識できない場合には(S14,“N”)、処理中の画質評価処理を終了する。
なお、S14の処理において、例えば、3箇所以上の部分領域の内、1箇所、または、2箇所の部分領域に対する評価用文字列の全ての文字が認識できた場合を想定する。この場合には、文字認識支援装置10は、例えば、該当箇所の座標情報を主記憶部12の所定の領域に一時的に記憶し、処理中の画質評価処理を終了するとしてもよい。文字認識支援装置10は、例えば、評価用文字列の全ての文字が認識できた部分領域について、該当箇所の座標情報に基づいて、認識された部分領域を撮影中の帳票画像が表示されるLCD等の表示画面に重畳して提示するとしてもよい。
図4Dに、LCD等に表示される、文字認識された部分領域についての表示例を例示する。図4Dの表示例において、領域Z1は、撮影中の帳票の撮像画像を表し、領域Z11
−Z14は、評価用文字列として採用された各文字列に対応する画像領域内の部分領域である。撮影中の帳票の撮像画像において、領域Z11は左上端部、領域Z12は右上端部、領域Z13は左下端部、領域Z14は右下端部に対応する。
図4Bに例示の画質評価処理により、例えば、領域Z12に対応する評価用文字列“日生”に含まれる全ての文字が文字認識されたと想定する。文字認識支援装置10は、例えば、図4BのS14の処理で記憶された部分領域の座標情報から、評価用文字列に含まれる全ての文字の文字認識が行われた部分領域を特定する。そして、文字認識支援装置10は、例えば、撮影中の帳票の撮像画像の、文字認識が行われた部分領域に重畳させて、帳票の撮影位置が固定されたことを示すマーカー等のガイド枠を表示する。
図4Dの表示例において、例えば、マーカーG12は、撮影中の撮像画像の、文字認識が行われた部分領域に対応する帳票の隅位置を囲む2つの縁辺を強調するガイド枠である。文字認識支援装置10は、例えば、撮影中の帳票の撮像画像に対し、文字認識が行われた部分領域に対応する帳票の隅位置を囲む2つの縁辺に対するガイド枠としてマーカーG12を表示する。例えば、領域Z12は、右上端部の隅に対応するため、撮影中の帳票の右上端部の隅を囲む上側縁辺及び右側縁辺に帳票の撮影位置が固定されたことを示すマーカーG12が重畳されて表示される。
なお、帳票の撮影位置が固定されたことを示すマーカーG12の表示時において、他の隅位置を囲む2つの縁辺に、帳票の撮影位置が固定されていないことを示すマーカーが表示されるとしてもよい。例えば、図4Dの表示例では、マーカーG12とは異なる表示形態のマーカーG11,G13,G14が、帳票の撮影位置が固定されていない他の隅位置を囲む2つの縁辺にガイド枠として重畳されて表示されている。
図4Dの表示例では、例えば、マーカーG12の表示形態は、隅位置を囲む2つの縁辺に重畳された実線として表示されるのに対し、他のマーカーG11,G13,G14の表示形態は、隅位置を囲む2つの縁辺に重畳された破線として表示されている。マーカーG11は、撮影中の帳票の左上端部の隅を囲む上側縁辺及び左側縁辺に重畳して表示されている。同様にして、マーカーG13は、撮影中の帳票の左下端部の隅を囲む下側縁辺及び左側縁辺に重畳して表示されている。マーカーG14は、撮影中の帳票の右下端部の隅を囲む下側縁辺及び右側縁辺に重畳して表示されている。
図4Dに例示のように、文字認識支援装置10は、撮影中の帳票画像に対し、部分的に文字認識された部分領域を提示することにより、撮影中の帳票に対する位置決めのためのカメラ等の傾き、動かし方等を補佐することが可能となる。文字認識支援装置10の利用者(ユーザ)は、例えば、LCD15a等の表示画面に表示された、撮影中の帳票のモニタ画像に対するマーカーG12等を参照し、撮影位置が固定された部分領域を基準として位置決め操作を行うことが可能となる。
図4Cに例示のフローチャートは、評価用文字列に含まれる文字に対する文字認識の一致の度合いを示す評価値を使用し、撮影中の撮像画像についての画質評価処理を行う場合の処理例である。図4Cに例示のフローチャートにおいて、S11,S12,S15の処理では、例えば、図4Bに例示のフローチャートの同番号の処理が行われる。
図4Cに例示のフローチャートにおいて、S16の処理では、文字認識支援装置10は、例えば、処理中の撮像画像の部分領域についての文字認識を行うと共に、評価用文字列の真の文字に対する文字毎の評価値を求める。S16の処理では、例えば、評価用文字列の真の文字に対する複数の文字候補が、真の文字との一致の度合いを示す評価値と共に求められる。
ここで、真の文字に対する文字候補の評価値は、例えば、“0−100”の範囲の一致の度合いで表すことができる。そして、文字認識支援装置10は、例えば、評価用文字列に含まれる真の文字に対する複数の文字候補について、数式(1)で説明した確信度を算出する。確信度は、例えば、評価用文字列に含まれる文字毎に求められる。
S17の処理では、文字認識支援装置10は、例えば、S16の処理で求められた全ての文字毎の確信度が予め設定された閾値:Th以上であるかを判定する。文字認識支援装置10は、例えば、評価用文字列DB201に登録された3隅以上の帳票の記述領域に対応する全ての部分領域について、評価用文字列に含まれる文字に対する確信度が全て、予め設定された閾値:Th以上であるかを判定する。
文字認識支援装置10は、例えば、帳票の3隅以上の記述領域に対応する各部分領域の、評価用文字列に含まれる全ての文字の確信度が閾値:Th以上である場合には(S17,“Y”)、S15の処理に移行する。一方、文字認識支援装置10は、例えば、帳票の3隅以上の記述領域に対応する各部分領域の、評価用文字列に含まれる全ての文字の確信度が閾値:Th以上でない場合には(S17,“N”)、処理中の画質評価処理を終了する。
なお、S17の処理において、例えば、3箇所以上の部分領域の内、1箇所、または、2箇所の部分領域に含まれる全ての文字の確信度が閾値:Th以上である場合を想定する。この場合には、文字認識支援装置10は、例えば、該当箇所の座標情報を主記憶部12の所定の領域に一時的に記憶し、処理中の画質評価処理を終了するとしてもよい。文字認識支援装置10は、例えば、確信度が閾値:Th以上である部分領域について、図4Dに例示のように、該当箇所の座標情報に基づいて撮影中の帳票画像が表示されるLCD15a等の表示画面に重畳して、文字認識された部分領域を提示することができる。
以上、説明したように、本実施形態の文字認識支援装置10では、カメラ14a等を介して受け付けた撮影中の帳票の撮像画像に対し、評価用文字列DB201に登録された評価用文字列および画像領域内の座標情報に基づいて画質評価を行うことができる。画質評価は、撮影中の帳票の画像領域内の3隅以上の部分領域を対象として行うことができる。画質評価は、撮影中の帳票の3隅以上の部分領域における、評価用文字列として登録された文字・文字列の文字認識の可否により行われる。このため、文字認識支援装置10は、撮影中の帳票の画像領域内の3隅以上の部分領域を対象として画質評価を行うことにより、例えば、撮影中の帳票に対する画像領域内の適正な位置決め、及び、撮像画像の帳票内の文字を正しく認識できるか否かを判定できる。本実施形態の文字認識支援装置10は、画像の確定前に撮影中の撮像画像に対し、文字を正しく認識できる認識対象の画像が撮れるかを予め判断することができる。
<実施例2>
実施例2の文字認識支援装置(以下、本実施形態の文字認識装置と称す)は、例えば、画質評価部での文字認識の結果に基づいて、撮影中の帳票に対する位置決めの支援を行う。実施例2の文字認識支援装置では、例えば、撮影中の帳票の評価用文字列に対応する画像領域内の3隅の部分領域の内、少なくとも2隅以上の部分領域について文字認識が行われることを条件として、撮影中の帳票に対する位置決めの支援が行われる。
実施例2の文字認識支援装置は、例えば、少なくとも文字認識が行われた2隅以上の部分領域から撮影中の帳票の状態を推定する。そして文字認識支援装置は、例えば、推定した撮影中の帳票の状態に基づいて、画像領域内の撮像画像に対して並進移動、回転移動、奥行き方向の前後移動、歪み補正等についての位置決めの支援を行う。文字認識支援装置
の撮影中の帳票に対する位置決めの支援は、例えば、撮影中の撮像画像に重畳するマーカー等のガイド枠として表示される。本実施形態の文字認識支援装置は、画像の確定前に撮影中の撮像画像に対し、文字を正しく認識できる撮影位置への移動を指示することが可能となる。
〔処理ブロック構成〕
図5に、本実施形態の文字認識支援装置のハードウェアの構成の一例を例示する。本実施形態の文字認識支援装置20は、実施例1の文字認識支援装置10と同様のハードウェアの構成を有する。但し、図5に例示のように、文字認識支援装置20では、CPU11が実行する処理手段として、画質評価部210、帳票状態推定部211、状態表示部212、検出データ処理部213の各処理手段を有する。なお、検出データ処理部213は、例えば、図2に例示の検出データ処理部102に相当する処理手段である。
[画質評価処理]
画質評価部210は、例えば、評価用文字列DB201に登録された評価用文字列に対応付けられた座標情報に基づいて、撮影中の帳票の撮像画像(画像データ)が含まれる画像領域内に、3隅以上の位置決めの支援を行うための“評価用領域”の設定を行う。そして、画質評価部210は、例えば、設定した2隅以上の“評価用領域”について文字認識を行い、帳票内に記述された文字を正しく認識できる画質であるかの画質評価を行う。画質評価部210は、例えば、少なくとも2隅以上の“評価用領域”において評価用文字列の文字認識が行われたことを判定し、撮影中の帳票の撮像画像に対する画質評価を行う。
画像領域内の評価用領域は、例えば、評価用文字列DB201に登録された評価用文字列の“sx”、“sy”、“ex”、“ey”の各座標情報に基づいて、以下の数式(2)、(3)の関係を満たすように設定することができる。なお、数式(2)における(sx´,sy´)は、評価用領域の左上画素の座標位置を表し、数式(3)における(ex´,ey´)は、評価用領域の右下画素の座標位置を表す。
(sx´,sy´)=(2sx−ex,2sy−ey) …数式(2)
(ex´,ey´)=(2ex−sx,2ey−sy) …数式(3)
数式(2)、(3)により、左上画素および右下画素の座標位置が求められた評価用領域では、例えば、評価用文字列の文字認識の対象となる領域範囲は、登録された座標情報に対し、9倍に拡張されることとなる。画質評価部210は、例えば、撮影中の画像領域内において、領域範囲が拡張された評価用領域を対象として、評価用文字列に含まれる文字毎の文字認識を行い、撮影中の帳票の撮像画像に対する画質評価を行う。画質評価部210の撮影中の撮像画像についての画質評価の結果は、例えば、帳票状態推定部211に引き渡される。
なお、領域範囲が拡張された評価用領域内には、例えば、左右方向、上下方向に傾いて歪みを伴った評価用文字列が、文字認識対象の文字列として検出される。左右方向、上下方向に傾いて歪みを伴った文字列では、評価用文字列として登録された真の文字に対し複数の文字候補が得られることが想定できる。このため、画質評価部210は、帳票の位置決めを適切に支援するため、例えば、実施例1で説明したように、数式(1)で算出される文字毎の確信度を用いて評価用領域の文字認識を行うとしてもよい。本実施形態の文字認識支援装置20の画質評価部210では、文字毎の確信度を用いて評価用領域の文字認識が行われることにより、例えば、評価用文字列に含まれる文字についての文字認識の信頼性を高めることができる。
[帳票状態推定処理]
帳票状態推定部211は、例えば、画質評価部210の画質の判定結果に基づいて撮影
中の帳票の状態を推定し、撮影中の撮像画像に対する、画像領域内の適正な撮影位置に位置決めを行うためのフラグ情報の付与を行う。本実施形態の文字認識支援装置20では、例えば、帳票状態推定部211により付与されたフラグ情報に基づいて、撮影中の撮像画像についての位置決めの支援が行われる。
帳票状態推定部211は、例えば、撮影中の撮像画像に対し、2隅の評価用領域について文字認識が行われた場合には、文字認識が行われた2隅の評価用領域の座標情報に基づいて、撮像画像の並進移動、回転移動、奥行き方向の前後移動の要否を判定する。
例えば、帳票状態推定部211は、撮影中の撮像画像の画像領域内の座標位置が、適正な撮影位置に対して並進移動を要する場合には、処理中の撮像画像に対し、3ビットのビット値で識別されるフラグ情報を、“並進フラグ”として付与する。また、例えば、帳票状態推定部211は、適正な撮影位置に対して回転移動、奥行き方向の前後移動を要する場合には、処理中の撮像画像に対し、2ビットのビット値で識別されるフラグ情報を、“回転フラグ”、“前後フラグ”として付与する。
また、帳票状態推定部211は、例えば、撮影中の撮像画像に対し、3隅の評価用領域について文字認識が行われた場合には、文字認識が行われた3隅の評価用領域の座標情報に基づいて、画像領域内の撮像画像の適正位置に対する移動の要否を判定する。
3隅の評価用領域について文字認識が行われた場合には、帳票状態推定部211は、例えば、画像領域内の撮像画像の適正位置に対する、並進移動、回転移動、奥行き方向の前後移動に加え、歪み補正の要否を判定する。歪み補正の要否判定は、例えば、上下方向、或いは、左右方向に並ぶ評価用領域で検出された評価用文字列間の距離と、評価用文字列DB201に登録された評価用文字列間の距離との比較により行われる。
帳票状態推定部211は、例えば、撮影中の撮像画像の画像領域内の座標位置が、適正な撮影位置に対して並進移動、回転移動、奥行き方向の前後移動を要する場合には、各移動の種別を表す各種フラグに、上述したフラグ情報を付与する。また、帳票状態推定部211は、例えば、歪み補正を要する場合には、3ビットのビット値で識別されるフラグ情報を、“歪みフラグ”として付与する。帳票状態推定部211で付与された各種フラグ情報は、例えば、状態表示部212に引き渡される。
帳票状態推定部211における、帳票の撮影状態の推定は、例えば、各評価用領域内で認識された文字列の重心座標と、各評価用領域に対応する評価用文字列の重心座標との比較により行われる。例えば、評価用文字列DB201に登録された評価用文字列を、図1B等に例示の“氏名”、“日生”、“番号”といった帳票の3隅の領域A11,A12,A13に記述された文字列と想定する。なお、以下の説明では、評価用文字列“氏名”は“評価文字列1”、“日生”は“評価文字列2”、“番号”は“評価文字列3”とも称する。
帳票状態推定部211は、例えば、評価用文字列DB201に登録された評価用文字列の各レコードに格納された文字毎の画像領域内の座標情報(sx,sy,ex,ey)から、該評価用文字列の重心座標を算出する。なお、評価用文字列の重心座標は、例えば、評価用文字列を囲む外接矩形の重心座標として表すことができる。
図6Aに、評価用文字列に対する重心座標の算出についての説明図を例示する。図6Aに例示の説明図において、評価用文字列は“氏名”であり、“氏(図6Aでは「文字1」)”および“名(図6Aでは「文字2」)”といった文字(単語)が含まれる。また、評価用文字列に含まれる“氏”および“名”のそれぞれを囲む外接矩形は実線で表され、“
氏名”といった評価用文字列の外接矩形は破線で表されている。
評価用文字列に含まれる各文字の、画像領域内の左上の画素位置は座標(sx,sy)で表され、同様にして右下の画素位置は座標(ex,ey)で表される。なお、文字毎の各座標位置は、例えば、図3に例示のように、評価用文字列DB201のレコードの「sx」、「sy」、「ex」、「ey」カラムに格納される。
帳票状態推定部211は、例えば、評価用文字列DB201を参照し、以下に示す数式(4)、(5)に基づいて、評価用文字列を囲む外接矩形の重心座標を算出する。なお、評価文字列1の重心座標は(Xchar1,Ychar1)、評価文字列2の重心座標は(Xchar2
,Ychar2)、評価文字列3の重心座標は(Xchar3,Ychar3)とする。
Xchar=(min(評価用文字列の各文字のsx)+max(評価用文字列の各文字
のex)) …数式(4)
Ychar=(min(評価用文字列の各文字のsy)+max(評価用文字列の各文字
のey)) …数式(5)
帳票状態推定部211は、数式(4)、(5)に基づいて、評価用文字列DB201に登録された3隅以上の評価用文字列についての各重心座標(Xchar1,Ychar1)、(Xchar2,Ychar2)、(Xchar3,Ychar3)を算出する。算出された、画像領域内の3隅以上の評価用文字列の各重心座標(Xchar1,Ychar1)、(Xchar2,Ychar2)、(Xchar3
,Ychar3)は、例えば、主記憶部12の所定の領域に一時的に記憶される。
なお、文字認識支援装置20は、評価用文字列DB201に登録された各評価用文字列の画素位置の座標に基づいて、予め評価文字列毎の重心座標を算出し、算出した重心座標を該評価文字列に対応付けて評価用文字列DB201に登録するとしてもよい。
また、帳票状態推定部211は、例えば、撮影中の帳票の撮像画像について、画質評価部210で設定した評価用領域内の部分画像から認識された“文字列1”、“文字列2”、“文字列3”の重心座標を同様にして算出する。なお、“文字列1”は、評価文字列1に対応する評価用領域内の部分画像から認識された文字列に対応し、“文字列2”は、評価文字列2に対応する評価用領域内の部分画像から認識された文字列に対応する。同様に、“文字列3”は、評価文字列3に対応する評価用領域内の部分画像から認識された文字列に対応する。算出された“文字列1”の重心座標は(X´char1,Y´char1)、“文字列2”の重心座標は(X´char2,Y´char2)、“文字列3”の重心座標は(X´char3
,Y´char3)とする。
帳票状態推定部211は、例えば、評価文字列1に対応する評価用領域内の部分画像から認識された“文字列1”に含まれる文字毎の左上画素位置、右下画素位置を特定する。そして、帳票状態推定部211は、例えば、特定した文字毎の左上画素位置、右下画素位置の左右方向の座標から、“文字列1”の重心座標の“X´char1”を数式(4)により
算出する。
また、帳票状態推定部211は、例えば、特定した文字毎の左上画素位置、右下画素位置の上下方向の座標から、“文字列1”の重心座標の“Y´char1”を数式(5)により
算出する。帳票状態推定部211は、“文字列2”、“文字列3”についても同様にして重心座標を求め、求めた各文字列の重心座標(X´char1,Y´char1)、(X´char2,
Y´char2)、(X´char3,Y´char3)を、例えば、主記憶部12の所定の領域に一時
的に記憶する。
帳票状態推定部211は、例えば、評価文字列毎に算出された重心座標と評価用領域内
の部分画像の文字列毎に算出された重心座標とに基づいて、並進移動、回転移動、奥行き方向の前後移動、歪み補正の要否の判定を行う。
例えば、帳票状態推定部211は、評価用文字列DB201の2隅以上の評価用文字列に対し、評価用文字列毎に算出された各重心座標に基づいて、2隅以上の評価用文字列の全体的な重心座標を算出する。
図6Bに、3隅の評価用文字列に対する全体的な重心座標の説明図を例示する。図6Bに例示の説明図において、丸囲みハッチングの領域Z11aは、左上隅の評価文字列1の重心座標(Xchar1,Ychar1)を表す。同様に、丸囲みハッチングの領域Z12a、Z13aは、それぞれ評価文字列2の重心座標(Xchar2,Ychar2)、評価文字列3の重心座標(Xchar3,Ychar3)を表す。また、3隅の各評価用文字列の重心座標から算出される全体的な重心座標G1は、例えば、(Xgrav,Ygrav)で表されている。
例えば、帳票状態推定部211は、以下に示す数式(6)、(7)に基づいて、2隅以上の評価用文字列に対する全体的な重心座標G1の(Xgrav,Ygrav)を算出する。
Xgrav=(1/n)×ΣXcharn´ …数式(6)
n´
Ygrav=(1/n)×ΣYcharn´ …数式(7)
n´
なお、数式(6)、(7)において、“n”は、画質評価部210により文字認識された評価用領域の箇所数を表し、“n´”は、文字認識された評価用領域に対応付けられた“評価文字列”の識別番号を表す。
例えば、画質評価部210において、文字認識された評価用領域の箇所数が“2”の場合には、“n=2”となり、文字認識された評価用領域に対応する評価用文字列が“評価文字列1”、“評価文字列3”の場合には、“n´=1、3”となる。帳票状態推定部211は、例えば、文字認識された評価用領域に対応する評価文字列1、3の各重心座標から数式(6)、(7)に基づいて、評価文字列1、3に対する全体的な重心座標G1を算出する。
同様にして、帳票状態推定部211は、例えば、画質評価部210で文字認識された2隅以上の評価用領域内の“文字列”に対する全体的な重心座標(X´grav,Y´grav)を算出する。画質評価部210で文字認識された2隅以上の評価用領域内の“文字列”に対する全体的な重心座標(X´grav,Y´grav)は、例えば、以下の数式(6a)、(7a)で表すことができる。
X´grav=(1/n)×ΣX´charn´ …数式(6a)
n´
Y´grav=(1/n)×ΣY´charn´ …数式(7a)
n´
帳票状態推定部211は、例えば、数式(6)、(7)より算出された重心座標(Xgrav,Ygrav)と、数式(6a)、(7a)より算出された重心座標(X´grav,Y´grav)との座標位置の比較を行い、各種移動、歪み補正の要否の判定を行う。判定の結果は、例えば、処理中の撮像画像に対して付加される、各種移動、歪み補正の要否を表す各種フラグのフラグ情報として反映される。各種フラグには、各種移動、歪み補正が“否”と判定される場合には、フラグ情報として“0”が設定される。一方、各種移動、歪み補正が“要”と判定される場合には、フラグ情報として“0”を除く、2−3ビットのビット値で識別されるフラグ情報が付与される。
なお、帳票状態推定部211は、例えば、撮影中の撮像画像に対し、2隅の評価用領域について文字認識が行われた場合には、並進移動、回転移動、奥行き方向の前後移動の順で各種移動の要否を判定する。なお、並進移動が“要”と判定される場合には、回転移動、奥行き方向の前後移動の判定は行われない。同様に、回転移動が“要”と判定される場合には、奥行き方向の前後移動の判定は行われない。
また、帳票状態推定部211は、例えば、撮影中の撮像画像に対し、3隅の評価用領域について文字認識が行われた場合には、並進移動、回転移動、奥行き方向の前後移動、歪み補正の順で各種移動、歪み補正の要否を判定する。並進移動が“要”と判定される場合には、回転移動、奥行き方向の前後移動、歪み補正の判定は行われない。同様に、回転移動が“要”と判定される場合には、奥行き方向の前後移動、歪み補正の判定は行われない。帳票状態推定部211は、例えば、並進移動、回転移動、奥行き方向の前後移動について“否”と判定された場合に、歪み補正の要否を判定する。
(並進移動)
帳票状態推定部211は、例えば、数式(6)、(7)より算出された重心座標(Xgrav,Ygrav)と、数式(6a)、(7a)より算出された重心座標(X´grav,Y´grav)との位置関係が、所定の範囲内であることの判定を行う。例えば、画像領域内の左右方向の範囲幅を閾値:Thx、上下方向の範囲幅を閾値:Thyとする。なお、画像領域内の左右方向の範囲幅、上下方向の範囲幅を表す各閾値は、文字認識支援装置20の画素密度等の性能、処理対象となる帳票に記述された文字のサイズ等に応じて任意に設定することができる。
帳票状態推定部211は、例えば、各重心座標の左右方向、上下方向の位置関係が、以下に示す、数式(8)、(9)の位置関係を満たすか否かを判定する。
(Xgrav−Thx)<X´grav<(Xgrav+Thx) …数式(8)
(Ygrav−Thy)<Y´grav<(Ygrav+Thy) …数式(9)
帳票状態推定部211は、例えば、各重心座標の左右方向、上下方向の位置関係が数式(8)、(9)を満たす場合には、“並進フラグ”に“0”のフラグ情報を設定する。一方、例えば、帳票状態推定部211は、各重心座標の左右方向、上下方向の位置関係が、数式(8)、(9)を満たさない場合には、それぞれの状態に応じて“並進フラグ”に“1”−“4”のフラグ情報を設定する。帳票状態推定部211は、例えば、“並進フラグ”に設定されたフラグ情報を主記憶部12の所定の領域に一時的に記憶する。“並進フラグ”に設定されたフラグ情報は、例えば、状態表示部212に引き渡される。
(回転移動)
帳票状態推定部211は、例えば、並進移動が“否”と判定される場合に、回転移動の要否の判定を行う。回転移動の判定では、例えば、文字認識支援装置20の備えるカメラ14aの光軸方向に対する回転の要否が判定される。回転移動の判定では、例えば、撮影中の帳票の撮像画像に対する回転移動の方向(時計回り、反時計回り)が判定される。
図6Cに、数式(6)、(7)で算出された重心位置を中心とした、3隅の評価用文字列の重心位置に対する角度の説明図を例示する。図6Cに例示の説明図において、丸囲みハッチングの領域Z11aは、左上隅の評価文字列1の重心座標(Xchar1,Ychar1)を表す。同様に、丸囲みハッチングの領域Z12a、Z13aは、それぞれ評価文字列2の重心座標(Xchar2,Ychar2)、評価文字列3の重心座標(Xchar3,Ychar3)を表す。また、3隅の各評価用文字列の重心座標から数式(6)、(7)で算出される全体的な重心座標G1は、例えば、(Xgrav,Ygrav)で表されている。なお、基準線L1は、例え
ば、重心座標G1を通り、文字認識支援装置20の画像領域の左右方向の縁辺に平行する基準線である。
また、図6Cに例示の説明図において、θchar3は、重心座標G1を中心として時計回
り方向に、基準線L1と評価文字列3の重心座標(Xchar3,Ychar3)方向との角度を表す。同様に、θchar2は、重心座標G1を中心として時計回り方向に、基準線L1と評価
文字列2の重心座標(Xchar2,Ychar2)方向との角度を表す。θchar1は、重心座標G
1を中心として時計回り方向に、基準線L1と評価文字列1の重心座標(Xchar1,Ychar1)方向との角度を表す。基準線L1と各評価文字列の重心位置方向との角度の大小関係は、θchar3<θchar2<θchar1の関係にある。
帳票状態推定部211は、例えば、三角関数の関係式により、重心座標(Xgrav,Ygrav)と評価文字列1の重心座標(Xchar1,Ychar1)から、θchar1を算出する。同様に
して、帳票状態推定部211は、重心座標(Xgrav,Ygrav)と評価文字列2の重心座標(Xchar2,Ychar2)からθchar2を、重心座標(Xgrav,Ygrav)と評価文字列3の重
心座標(Xchar3,Ychar3)からθchar3を算出する。
同様にして、帳票状態推定部211は、例えば、文字認識された3隅の評価用領域内の“文字列”に対する全体的な重心座標(X´grav,Y´grav)と、“文字列”毎の重心座標から、“文字列”毎の角度を算出する。帳票状態推定部211は、例えば、三角関数の関係式により、重心座標(X´grav,Y´grav)と“文字列1”の重心座標(X´char1
,Y´char1)から、θ´char1を算出する。同様にして、帳票状態推定部211は、重心座標(X´grav,Y´grav)と“文字列2”の重心座標(X´char2,Y´char2)からθ´char2を、重心座標(X´grav,Y´grav)と“文字列3”の重心座標(X´char3,Y´char3)からθ´char3を算出する。
そして、帳票状態推定部211は、例えば、各評価文字列の角度(θchar1,θchar2,θchar3)と評価用領域内で文字認識された各“文字列”の角度(θ´char1,θ´char2
,θ´char3)との関係が、所定の範囲内であることの判定を行う。例えば、範囲幅を閾
値:Thθとする。閾値:Thθは、文字認識支援装置20の画素密度等の性能、処理対象となる帳票に記述された文字のサイズ等に応じて任意に設定することができる。
帳票状態推定部211は、例えば、各評価文字列の角度(θchar1,θchar2,θchar3
)と各“文字列”の角度(θ´char1,θ´char2,θ´char3)との関係が、以下に示す
数式(10)の関係を満たすか否かを判定する。
(θchar1+θchar2+θchar3−Thθ)<(θ´char1+θ´char2+θ´char3)<
(θchar1+θchar2+θchar3+Thθ) …数式(10)
帳票状態推定部211は、例えば、各評価文字列の角度(θchar1,θchar2,θchar3
)と各“文字列”の角度(θ´char1,θ´char2,θ´char3)との関係が、数式(10
)を満たす場合には、“回転フラグ”に“0”のフラグ情報を設定する。一方、例えば、帳票状態推定部211は、各評価文字列の角度と各“文字列”の角度との関係が、数式(10)を満たさない場合には、それぞれの状態に応じて“回転フラグ”に“1”−“2”のフラグ情報を設定する。帳票状態推定部211は、例えば、“回転フラグ”に設定されたフラグ情報を主記憶部12の所定の領域に一時的に記憶する。“回転フラグ”に設定されたフラグ情報は、例えば、状態表示部212に引き渡される。
なお、数式(10)は、3隅の評価用領域内で各“文字列”の文字認識が行われた場合の関係式である。例えば、2隅の評価用領域内において、各“文字列”の文字認識が行われた場合には、帳票状態推定部211は、以下に示す数式(10a)の関係により、回転
移動の要否を判定するとすればよい。なお、数式(10a)は、“文字列1”、“文字列2”の文字認識が行われた場合の関係例である。
(θchar1+θchar2−Thθ)<(θ´char1+θ´char2)<
(θchar1+θchar2+Thθ) …数式(10a)
他の“文字列1”と“文字列3”、“文字列2”と“文字列3”の文字認識が行われた場合には、数式(10a)の“θchar”の識別番号を、文字認識が行われた“文字列”の識別番号に替えればよい。帳票状態推定部211は、例えば、文字認識が行われた各“文字列”の角度と、各“文字列”に対応する“評価文字列”の角度との関係が、数式(10a)を満たす場合には、“回転フラグ”に“0”のフラグ情報を設定する。一方、例えば、帳票状態推定部211は、各“文字列”の角度と、各“文字列”に対応する“評価文字列”の角度との関係が、数式(10a)を満たさない場合には、それぞれの状態に応じて“回転フラグ”に“1”−“2”のフラグ情報を設定する。2隅の場合についても、3隅の場合と同様に、“回転フラグ”に設定されたフラグ情報は、例えば、状態表示部212に引き渡される。
(奥行き方向の前後移動)
帳票状態推定部211は、例えば、並進移動、回転移動が“否”と判定される場合に、奥行き方向の前後移動の要否の判定を行う。奥行き方向の前後移動の判定では、例えば、文字認識支援装置20の備えるカメラ14aと帳票との間の、奥行き方向の前後移動の要否が判定される。前後移動の判定では、例えば、撮影中の撮像画像に対する奥行き方向の前後移動の方向が判定される。
図6Cの説明図において、例えば、重心座標(Xgrav,Ygrav)と、3隅の各評価文字列の重心座標(Xchar1,Ychar1)、(Xchar2,Ychar2)、(Xchar3,Ychar3)との距離を、それぞれ“Dchar1”、“Dchar2”、“Dchar3”とする。同様に、評価用領域
内で文字認識された3隅の“文字列”に対する重心座標(X´grav,Y´grav)と、各“文字列”の重心座標(X´char1,Y´char1)、(X´char2,Y´char2)、(X´char3,Y´char3)との距離を、それぞれ“D´char1”、“D´char2”、“D´char3”と
する。
帳票状態推定部211は、例えば、各評価文字列に対する距離(Dchar1,Dchar2,Dchar3)と評価用領域内で文字認識された各“文字列”に対する距離(D´char1,D´char2,D´char3)との関係が、所定の範囲内であることの判定を行う。例えば、範囲幅を閾値:Thdとする。閾値:Thdは、文字認識支援装置20の画素密度等の性能、処理対象となる帳票に記述された文字のサイズ等に応じて任意に設定することができる。
帳票状態推定部211は、例えば、各評価文字列に対する距離(Dchar1,Dchar2,Dchar3)と各“文字列”に対する距離(D´char1,D´char2,D´char3)との関係が、が、以下に示す数式(11)の関係を満たすか否かを判定する。
(Dchar1+Dchar2+Dchar3−Thd)<(D´char1+D´char2+D´char3)<
(Dchar1+Dchar2+Dchar3+Thd) …数式(11)
帳票状態推定部211は、例えば、各評価文字列に対する距離(Dchar1,Dchar2,Dchar3)と各“文字列”に対する距離(D´char1,D´char2,D´char3)との関係が、数式(11)を満たす場合には、“前後フラグ”に“0”のフラグ情報を設定する。一方、例えば、帳票状態推定部211は、各評価文字列に対する距離と各“文字列”に対する距離との関係が、数式(11)を満たさない場合には、それぞれの状態に応じて“前後フラグ”に“1”−“2”のフラグ情報を設定する。帳票状態推定部211は、例えば、“前後フラグ”に設定されたフラグ情報を主記憶部12の所定の領域に一時的に記憶する。
“前後フラグ”に設定されたフラグ情報は、例えば、状態表示部212に引き渡される。
なお、数式(11)は、3隅の評価用領域内で各“文字列”の文字認識が行われた場合の関係式である。例えば、2隅の評価用領域内において、各“文字列”の文字認識が行われた場合には、帳票状態推定部211は、以下に示す数式(11a)の関係により、奥行き方向の前後移動の要否を判定するとすればよい。なお、数式(11a)は、“文字列1”、“文字列2”の文字認識が行われた場合の関係例である。
(Dchar1+Dchar2−Thd)<(D´char1+D´char2)<
(Dchar1+Dchar2+Thd) …数式(11a)
他の“文字列1”と“文字列3”、“文字列2”と“文字列3”の文字認識が行われた場合には、数式(11a)の“Dchar”の識別番号を、文字認識が行われた“文字列”の識別番号に替えればよい。帳票状態推定部211は、例えば、文字認識が行われた各“文字列”に対する距離と、各“文字列”に対応する“評価文字列”の距離との関係が、数式(11a)を満たす場合には、“前後フラグ”に“0”のフラグ情報を設定する。一方、例えば、帳票状態推定部211は、各“文字列”に対する距離と、各“文字列”に対応する“評価文字列”の距離との関係が、数式(11a)を満たさない場合には、それぞれの状態に応じて“前後フラグ”に“1”−“2”のフラグ情報を設定する。2隅の場合についても、3隅の場合と同様に、“前後フラグ”に設定されたフラグ情報は、例えば、状態表示部212に引き渡される。
(歪み補正)
帳票状態推定部211は、例えば、3隅の評価用領域について文字認識が行われた状態で、並進移動、回転移動、奥行き方向の前後移動の要否が“否”と判定される場合に、歪み補正の要否の判定を行う。歪み補正の判定では、例えば、撮影中の帳票の上下方向、或いは、左右方向の辺に対する歪み補正の要否が判定される。
図6Cに例示の説明図において、例えば、帳票の左右方向の辺と平行する評価文字列1と評価文字列2との重心座標間の距離を“C12”とする。また、帳票の上下方向の辺と平行する評価文字列1と評価文字列3の重心座標間の距離を“C13”とする。同様に、評価用領域内で文字認識された、帳票の左右方向の辺と平行する“文字列1”と“文字列2”との重心座標間の距離を“C´12”とし、帳票の上下方向の辺と平行する“文字列1”と“文字列3”との重心座標間の距離を“C´13”とする。
帳票状態推定部211は、例えば、帳票の左右方向の辺と平行する評価文字列1,2の重心座標間の距離“C12”と“文字列1”,“文字列2”の重心座標間の距離“C´12”との比である“C´12/C12”を求める。また、帳票状態推定部211は、例えば、帳票の上下方向の辺と平行する評価文字列1,3の重心座標間の距離“C13”と“文字列1”,“文字列3”の重心座標間の距離“C´13”との比である“C´13/C13”を求める。
歪み補正の要否の判定は、例えば、帳票の左右方向における評価文字列間の距離と“文字列”間の距離との距離比(C´12/C12)、帳票の上下方向における評価文字列間の距離と“文字列”間の距離との距離比(C´13/C13)に基づいて行われる。
例えば、帳票状態推定部211は、|1−(C´12/C12)|、及び、|1−(C´13/C13)|を求め、|1−(C´12/C12)|と|1−(C´13/C13)|との大小関係を判定する。そして、帳票状態推定部211は、例えば、|1−(C´12/C12)|或いは|1−(C´13/C13)|の大きな方について、所定の閾値:Thcとの大小関係を判定する。なお、閾値:Thdは、文字認識支援装置20の画素密度等の性能、処理対象となる帳票に記述された文字のサイズ等に応じて任意に設定することができる。
帳票状態推定部211は、例えば、|1−(C´12/C12)|或いは|1−(C´13/C13)|の大きな方について、以下に示す数式(12)、(13)の関係を満たすか否かを判定する。
−Thc<1−(C´12/C12)<Thc …数式(12)
−Thc<1−(C´13/C13)<Thc …数式(13)
帳票状態推定部211は、例えば、|1−(C´12/C12)|或いは|1−(C´13/C13)|の大きな方について、数式(12)、(13)の関係を満たす場合には、“歪みフラグ”に“0”のフラグ情報を設定する。また、帳票状態推定部211は、例えば、|1−(C´12/C12)|と|1−(C´13/C13)|とが等しい場合についても、“歪みフラグ”に“0”のフラグ情報を設定する。
一方、帳票状態推定部211は、例えば、|1−(C´12/C12)|>|1−(C´13/C13)|の場合であり、(1−(C´12/C12))が数式(12)の関係を満たさない場合には、“歪みフラグ”に“1”−“2”のフラグ情報を設定する。また、帳票状態推定部211は、例えば、|1−(C´12/C12)|<|1−(C´13/C13)|の場合であり、(1−(C´13/C13))が数式(13)の関係を満たさない場合には、“歪みフラグ”に“3”−“4”のフラグ情報を設定する。
帳票状態推定部211は、例えば、“歪みフラグ”に設定されたフラグ情報を主記憶部12の所定の領域に一時的に記憶する。“歪みフラグ”に設定されたフラグ情報は、例えば、状態表示部212に引き渡される。
[状態表示処理]
状態表示部212は、例えば、帳票状態推定部211から引き渡された並進移動、回転移動、奥行き方向の前後移動、歪み補正の各種フラグ情報に基づいて、撮影中の撮像画像に対する、適正な撮影位置への位置決め支援を行う。
状態表示部212は、例えば、適正な撮影位置を示す矩形状のガイド枠等を撮影中の撮像画像に重畳させ、文字認識支援装置20のLCD15a等のモニタ表示が行われる表示画面に表示する。そして、状態表示部212は、例えば、各種フラグ情報に基づいて、帳票の撮像画像についての画像領域内での移動方向の指示を行う。撮像画像に対する画像領域内の移動方向の指示は、例えば、移動方向を示す矢印、マーカー等の表示部品を用いることができる。状態表示部212は、例えば、適正な撮影位置を示す矩形状のガイド枠、及び、撮像画像の画像領域内の移動方向を示す矢印等の表示部品を、撮影中の撮像画像に重畳させ、モニタ表示が行われるLCD15a等の表示画面に表示する。
(並進移動)
図6Dに、並進移動に係る位置決め支援の説明図を例示する。図6Dの説明図は、画像領域内の帳票の撮像画像の位置が右方向に並進移動するよう、位置決め支援を行う場合の表示例である。なお、撮影対象となる帳票位置が固定されていると想定すると、画像領域内の帳票の撮像画像の位置が右方向に並進移動する場合では、文字認識支援装置20のカメラ14aは、相対的に左方向に移動することとなる。
図6Dの説明図において、縁辺Z0a−Z0dに囲まれた矩形の画像領域Z0は文字認識支援装置20の画像領域を表し、領域Z1は撮影中の帳票の撮像画像(画像データ)の画像領域を表す。また、破線矩形で示されるガイド枠G15は、撮影中の帳票の適正な撮影位置を示す表示部品であり、矢先が右方向に向いた矢印G16は、画像領域内の撮像画像の移動方向を指示する表示部品である。
図6Dに例示の説明図では、画像領域Z0内における撮影中の帳票の撮像画像の領域Z1は、相対的に左側に位置している。また、適正な撮影位置を示すガイド枠15Gは、撮影中の帳票の撮像画像の領域Z1の一部に重畳し、相対的に右側寄りに表示されている。そして、右向き矢印G16は、画像領域Z0内の帳票の撮像画像をガイド枠15Gの方向に移動するよう、撮影中の帳票の撮像画像の領域Z1の一部に重畳して表示されている。
状態表示部212は、例えば、帳票状態推定部211により、(Xgrav−Thx)>X´gravと判定される場合には、図6Dの説明図に例示のように、画像領域Z0内の帳票の撮像画像(領域Z1)の位置が右方向に並進移動するよう位置決め支援を行う。帳票状態推定部211では、(Xgrav−Thx)>X´gravと判定される場合には、例えば、“並進フラグ”に“1”のフラグ情報が設定される。状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)の一部に適正な撮影位置を示すガイド枠15G、及び、右向き矢印G16を重畳させて表示し、画像領域Z0内の帳票の撮像画像の位置が右方向に並進移動するよう指示を行う。
また、状態表示部212は、例えば、帳票状態推定部211により、(Xgrav+Thx)<X´gravと判定される場合には、画像領域Z0内の帳票の撮像画像(領域Z1)の位置が左方向に並進移動するよう位置決め支援を行う。帳票状態推定部211では、(Xgrav+Thx)<X´gravと判定される場合には、例えば、“並進フラグ”に“2”のフラグ情報が設定される。状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)の一部に適正な撮影位置を示すガイド枠15G、及び、左向き矢印G16を重畳させて表示し、画像領域Z0内の帳票の撮像画像の位置が左方向に並進移動するよう指示を行う。
状態表示部212は、例えば、帳票状態推定部211により、(Ygrav−Thy)>Y´gravと判定される場合には、画像領域Z0内の帳票の撮像画像(領域Z1)の位置が下方向に並進移動するよう位置決め支援を行う。帳票状態推定部211では、(Ygrav−Thy)>Y´gravと判定される場合には、例えば、“並進フラグ”に“3”のフラグ情報が設定される。状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)の一部に適正な撮影位置を示すガイド枠15G、及び、下向き矢印G16を重畳させて表示し、画像領域Z0内の帳票の撮像画像の位置が下方向に並進移動するよう指示を行う。
また、状態表示部212は、例えば、帳票状態推定部211により、(Ygrav+Thy)<Y´gravと判定される場合には、画像領域Z0内の帳票の撮像画像(領域Z1)の位置が上方向に並進移動するよう位置決め支援を行う。帳票状態推定部211では、(Ygrav+Thy)<Y´gravと判定される場合には、例えば、“並進フラグ”に“4”のフラグ情報が設定される。状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)の一部に適正な撮影位置を示すガイド枠15G、及び、上向き矢印G16を重畳させて表示し、画像領域Z0内の帳票の撮像画像の位置が上方向に並進移動するよう指示を行う。
(回転移動)
図6Eに、回転移動に係る位置決め支援の説明図を例示する。図6Eの説明図は、画像領域内の帳票の撮像画像が、“文字列”に対する全体的な重心座標(X´grav,Y´grav)を中心として時計回りに回転移動するよう、位置決め支援を行う場合の表示例である。なお、撮影対象となる帳票位置が固定されていると想定すると、画像領域内の帳票の撮像画像が時計回りに回転する場合では、文字認識支援装置20のカメラ14aは、相対的に反時計回りに回転することとなる。
図6Eの説明図において、縁辺Z0a−Z0dに囲まれた矩形の画像領域Z0は文字認識支援装置20の画像領域を表し、領域Z1は撮影中の帳票の撮像画像(画像データ)の画像領域を表す。また、破線矩形で示されるガイド枠G15は、撮影中の帳票の適正な撮影位置を示す表示部品であり、湾曲した右回り(時計回り)矢印G17は、画像領域内の撮像画像の移動方向を指示する表示部品である。
図6Eに例示の説明図では、画像領域Z0内における撮影中の帳票の撮像画像の領域Z1は、右上がり斜めに傾斜して位置している。適正な撮影位置を示すガイド枠15Gは、撮影中の帳票の撮像画像の領域Z1の一部に重畳し、ガイド枠15Gの上下左右の縁辺は、画像領域Z0の縁辺Z0a−Z0dと並行するように表示されている。湾曲した右回り(時計回り)矢印G17は、領域Z1の撮像画像の上下左右の縁辺が、ガイド枠15Gの上下左右の縁辺と並行となるよう、撮影中の帳票の撮像画像の領域Z1の一部に重畳して表示されている。湾曲した右回り(時計回り)矢印G17は、“文字列”に対する全体的な重心座標(X´grav,Y´grav)を中心として、撮影中の帳票の撮像画像の領域Z1が時計回りに回転移動するよう、表示されている。
状態表示部212は、例えば、帳票状態推定部211により、(θchar1+θchar2−Thθ)>(θ´char1+θ´char2)と判定される場合には、図6Eに例示のように、画像領域Z0内の帳票の撮像画像の領域Z1が時計回りに回転するよう、支援を行う。帳票状態推定部211では、(θchar1+θchar2−Thθ)>(θ´char1+θ´char2)と判定される場合には、例えば、“回転フラグ”に“1”のフラグ情報が設定される。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)の一部に適正な撮影位置を示すガイド枠15G、及び、湾曲した右回り(時計回り)矢印G17を重畳させて表示する。そして、状態表示部212は、例えば、撮影中の帳票の撮像画像の領域Z1が重心座標(X´grav,Y´grav)を中心として、時計回りに回転移動するよう指示を行う。状態表示部212は、例えば、重心座標(X´grav,Y´grav)を中心として、時計回りに回転された、右上がり斜めに傾斜した撮像画像の上下左右の縁辺が、ガイド枠15Gの上下左右の縁辺と並行となるように、位置決め支援を行う。
また、状態表示部212は、例えば、帳票状態推定部211により、(θchar1+θchar2+Thθ)<(θ´char1+θ´char2)と判定される場合には、画像領域Z0内の帳票の撮像画像の領域Z1が反時計回りに回転するよう、支援を行う。帳票状態推定部211では、(θchar1+θchar2+Thθ)<(θ´char1+θ´char2)と判定される場合には、例えば、“回転フラグ”に“2”のフラグ情報が設定される。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)の一部に適正な撮影位置を示すガイド枠15G、及び、湾曲した左回り(反時計回り)矢印G17を重畳させて表示する。そして、状態表示部212は、例えば、撮影中の帳票の撮像画像の領域Z1が重心座標(X´grav,Y´grav)を中心として、反時計回りに回転移動するよう指示を行う。状態表示部212は、例えば、重心座標(X´grav,Y´grav)を中心として、反時計回りに回転された、左上がり斜めに傾斜した撮像画像の上下左右の縁辺が、ガイド枠15Gの上下左右の縁辺と並行となるように、位置決め支援を行う。
(奥行き方向の前後移動)
図6Fに、奥行き方向の前後移動に係る位置決め支援の説明図を例示する。図6Fの説明図は、画像領域内の帳票の撮像画像のサイズが拡大するように、帳票方向に移動するよう(奥行き方向の前方向に移動)、位置決め支援を行う場合の表示例である。なお、帳票位置が固定されていると想定すると、画像領域内の帳票の撮像画像のサイズが拡大するように、帳票方向に移動する場合では、帳票と文字認識支援装置20のカメラ14aとの間
の距離が縮小するよう、奥行き方向の前方向に移動することとなる。
図6Fの説明図において、縁辺Z0a−Z0dに囲まれた矩形の画像領域Z0は文字認識支援装置20の画像領域を表し、領域Z1は撮影中の帳票の撮像画像(画像データ)の画像領域を表す。破線矩形で示されるガイド枠G15は、撮影中の帳票の適正な撮影位置を示す表示部品である。縁辺Z0bに向かう右向き矢印G18a、及び、縁辺Z0dに向かう左向き矢印G18bは、画像領域内の撮像画像の拡大・縮小を指示する一対の表示部品である。
図6Fに例示の説明図では、画像領域Z0内における撮影中の帳票の撮像画像の領域Z1は、相対的に領域サイズが縮小された状態で位置している。適正な撮影位置を示すガイド枠15Gは、撮影中の帳票の撮像画像の領域Z1を囲むように重畳し、ガイド枠15Gの上下左右の縁辺は、画像領域Z0の縁辺Z0a−Z0dと並行するように表示されている。右向き矢印G18aは、領域Z1の撮像画像が領域サイズを縁辺Z0bに向かって拡大するよう、撮影中の帳票の撮像画像の領域Z1の右端側に重畳して表示されている。また、左向き矢印G18bは、領域Z1の撮像画像が領域サイズを縁辺Z0dに向かって拡大するよう、撮影中の帳票の撮像画像の領域Z1の左端側に重畳して表示されている。右向き矢印G18a、左向き矢印G18bは、撮像画像の領域Z1の左右方向に対を成して表示されている。
状態表示部212は、例えば、帳票状態推定部211により、(Dchar1+Dchar2+Dchar3−Thd)>(D´char1+D´char2+D´char3)と判定される場合には、図6Fに例示のように、画像領域Z0内の帳票の撮像画像の領域Z1が拡大するよう支援を行う。帳票状態推定部211では、(Dchar1+Dchar2+Dchar3−Thd)>(D´char1+D´char2+D´char3)と判定される場合には、例えば、“前後フラグ”に“1”のフラグ情報が設定される。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)を囲む適正な撮影位置を示すガイド枠15G、及び、撮像画像の領域Z1の左右方向に対を成す右向き矢印G18a、左向き矢印G18bを重畳させて表示する。そして、状態表示部212は、例えば、撮影中の帳票の撮像画像の領域Z1が、領域サイズを拡大する方向に移動するよう、指示を行う。状態表示部212は、例えば、領域サイズを拡大する方向に移動させた帳票の撮像画像の領域Z1が、ガイド枠G15と合致するように、位置決め支援を行う。
また、状態表示部212は、例えば、帳票状態推定部211により、(D´char1+D
´char2+D´char3)>(Dchar1+Dchar2+Dchar3+Thd)と判定される場合には
、画像領域Z0内の帳票の撮像画像の領域Z1が縮小するよう支援を行う。帳票状態推定部211では、(D´char1+D´char2+D´char3)>(Dchar1+Dchar2+Dchar3+Thd)と判定される場合には、例えば、“前後フラグ”に“2”のフラグ情報が設定される。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)に適正な撮影位置を示すガイド枠15Gを重畳させて表示する。また、状態表示部212は、例えば、撮像画像の領域Z1の左右方向に対を成す左向き矢印G18a、右向き矢印G18bを重畳させて表示する。左向き矢印G18aは、撮像画像の領域Z1の右端側に表示され、右向き矢印G18bは、撮像画像の領域Z1の左端側に表示される。
状態表示部212は、例えば、帳票と文字認識支援装置20のカメラ14aとの間の距離が離間し、撮影中の帳票の撮像画像の領域Z1が、領域サイズを縮小する方向(奥行き方向の後方向)に移動するよう、指示を行う。状態表示部212は、例えば、領域サイズ
を縮小する方向に移動させた帳票の撮像画像の領域Z1が、ガイド枠G15と合致するように、位置決め支援を行う。
(歪み補正)
図6Gに、歪み補正に係る位置決め支援の説明図を例示する。図6Gの説明図は、画像領域内の帳票の撮像画像について、左端側の上下方向の縁辺のサイズが縮小するように、歪み補正の支援を行う場合の表示例である。
図6Gの説明図では、縁辺Z0a−Z0dに囲まれた矩形の画像領域Z0は文字認識支援装置20の画像領域を表し、領域Z1は撮影中の帳票の撮像画像(画像データ)の画像領域を表す。また、破線矩形で示されるガイド枠G15は、撮影中の帳票の適正な撮影位置を示す表示部品である。左方向にくの字状に折れた矢印群G19は、画像領域Z0内の帳票の撮像画像の歪み補正を支持する表示部品である。図6Gの例では、矢印群G19は、3個の左方向にくの字状に折れた矢印G19a、G19b、G19cを有し、各矢印の表示サイズは、右端側の矢印G19aから左端側の矢印G19cに向かって、順に拡大している。
図6Gの説明図において、画像領域Z0内における撮影中の帳票の撮像画像の左右の縁辺は、ガイド枠G15の左右の縁辺と並行する状態で表示されている。帳票の撮像画像の左端側の縁辺の上下方向のサイズは、右端側の縁辺の上下方向のサイズより大きく表示されている。また、帳票の撮像画像の上下の縁辺は、ガイド枠G15の上下の縁辺に対し傾斜した状態で表示されている。帳票の撮像画像の上下の縁辺は、左端側から右端側に掛けて窄むように傾斜して表示されている。
例えば、撮影時の帳票位置が固定されていると想定すると、図6Gの例では、帳票と文字認識支援装置20のカメラ14aは、相対的に左側の距離が右側の距離に比べて短くなるよう、帳票側に近づいて傾いた状態で撮影されていることが判る。このため、左端側の上下方向の縁辺のサイズが縮小するように歪み補正の支援を行う場合では、文字認識支援装置20は、帳票の左側に近づいて傾いていたカメラ14aの距離を遠ざける方向に、移動することとなる。
図6Gの例では、例えば、帳票状態推定部211により、|1−(C´12/C12)|<|1−(C´13/C13)|であり、−Thc>1−(C´13/C13)と判定され、“歪みフラグ”に“3”のフラグ情報が設定される。状態表示部212は、|1−(C´12/C12)|<|1−(C´13/C13)|であり、−Thc>1−(C´13/C13)と判定される場合には、例えば、画像領域Z0内の帳票の撮像画像の左端側の上下方向の縁辺のサイズが縮小するように、歪み補正の支援を行う。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)に適正な撮影位置を示すガイド枠15Gを重畳させて表示する。そして、状態表示部212は、例えば、左方向にくの字状に折れた矢印群G19を、帳票の撮像画像の右端側の縁辺に重畳させて表示する。
状態表示部212は、例えば、撮影中の帳票の左側に近づいて傾いていた、文字認識支援装置20のカメラ14aを遠ざける方向に移動させ、撮影中の帳票の撮像画像(領域Z1)の左端側の上下方向の縁辺のサイズが縮小するように、歪み補正の指示を行う。状態表示部212は、例えば、左端側の上下方向の縁辺のサイズが縮小する方向に移動させた帳票の撮像画像の領域Z1が、ガイド枠G15と合致するように、位置決め支援を行う。
次に、例えば、帳票状態推定部211により、|1−(C´12/C12)|<|1−(C
´13/C13)|であり、Thc<1−(C´13/C13)と判定される場合を想定する。|1−(C´12/C12)|<|1−(C´13/C13)|であり、Thc<1−(C´13/C13)と判定される場合には、例えば、“歪みフラグ”に“4”のフラグ情報が設定される。
状態表示部212は、|1−(C´12/C12)|<|1−(C´13/C13)|であり、Thc<1−(C´13/C13)と判定される場合には、例えば、画像領域Z0内の帳票の撮像画像の右端側の上下方向の縁辺のサイズが縮小するように、歪み補正の支援を行う。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)に適正な撮影位置を示すガイド枠15Gを重畳させて表示する。そして、状態表示部212は、例えば、右方向にくの字状に折れた矢印群G19を、帳票の撮像画像の左端側の縁辺に重畳させて表示する。なお、矢印群G19に含まれる各矢印の表示サイズは、左端側の矢印G19aから右端側の矢印G19cに向かって、順に拡大するよう表示される。
状態表示部212は、例えば、撮影中の帳票の右側に近づいて傾いていた、文字認識支援装置20のカメラ14aを遠ざける方向に移動させ、撮影中の帳票の撮像画像(領域Z1)の右端側の上下方向の縁辺のサイズが縮小するように、歪み補正の指示を行う。状態表示部212は、例えば、右端側の上下方向の縁辺のサイズが縮小する方向に移動させた帳票の撮像画像の領域Z1が、ガイド枠G15と合致するように、位置決め支援を行う。
また、例えば、帳票状態推定部211により、|1−(C´12/C12)|>|1−(C´13/C13)|であり、−Thc>1−(C´12/C12)と判定される場合を想定する。|1−(C´12/C12)|>|1−(C´13/C13)|であり、−Thc>1−(C´12/C12)と判定される場合には、例えば、“歪みフラグ”に“1”のフラグ情報が設定される。
状態表示部212は、|1−(C´12/C12)|>|1−(C´13/C13)|であり、−Thc>1−(C´12/C12)と判定される場合には、例えば、画像領域Z0内の帳票の撮像画像の上端側の左右方向の縁辺のサイズが縮小するように、歪み補正の支援を行う。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)に適正な撮影位置を示すガイド枠15Gを重畳させて表示する。そして、状態表示部212は、例えば、上方向にくの字状に折れた矢印群G19を、帳票の撮像画像の下端側の縁辺に重畳させて表示する。なお、矢印群G19に含まれる各矢印の表示サイズは、最下側の矢印G19aから最上側の矢印G19cに向かって、順に拡大するよう表示される。
状態表示部212は、例えば、撮影中の帳票の上側に近づいて傾いていた、文字認識支援装置20のカメラ14aを遠ざける方向に移動させ、撮影中の帳票の撮像画像(領域Z1)の上端側の左右方向の縁辺のサイズが縮小するように、歪み補正の指示を行う。状態表示部212は、例えば、上端側の左右方向の縁辺のサイズが縮小する方向に移動させた帳票の撮像画像の領域Z1が、ガイド枠G15と合致するように、位置決め支援を行う。
また、例えば、帳票状態推定部211により、|1−(C´12/C12)|>|1−(C´13/C13)|であり、Thc<1−(C´12/C12)と判定される場合を想定する。|1−(C´12/C12)|>|1−(C´13/C13)|であり、Thc<1−(C´12/C12)と判定される場合には、例えば、“歪みフラグ”に“2”のフラグ情報が設定される。
状態表示部212は、|1−(C´12/C12)|>|1−(C´13/C13)|であり、Thc<1−(C´12/C12)と判定される場合には、例えば、画像領域Z0内の帳票の撮像画像の下端側の左右方向の縁辺のサイズが縮小するように、歪み補正の支援を行う。
状態表示部212は、例えば、撮影中の帳票の撮像画像(領域Z1)に適正な撮影位置を示すガイド枠15Gを重畳させて表示する。そして、状態表示部212は、例えば、下方向にくの字状に折れた矢印群G19を、帳票の撮像画像の上端側の縁辺に重畳させて表示する。なお、矢印群G19に含まれる各矢印の表示サイズは、最上側の矢印G19aから最下側の矢印G19cに向かって、順に拡大するよう表示される。
状態表示部212は、例えば、撮影中の帳票の下側に近づいて傾いていた、文字認識支援装置20のカメラ14aを遠ざける方向に移動させ、撮影中の帳票の撮像画像(領域Z1)の下端側の左右方向の縁辺のサイズが縮小するように、歪み補正の指示を行う。状態表示部212は、例えば、下端側の左右方向の縁辺のサイズが縮小する方向に移動させた帳票の撮像画像の領域Z1が、ガイド枠G15と合致するように、位置決め支援を行う。
〔処理フロー〕
以下、図7A−7H、7J、8A−8Eに例示のフローチャートを参照し、本実施形態の文字認識支援装置20の文字認識処理を説明する。図7Aは、文字認識支援装置20の文字認識処理の全体処理を示すフローチャートの例示である。図7Aに例示のフローチャートにおいて、文字認識処理の開始は、例えば、文字認識処理の対象となる帳票の、撮像画像の受け付けのときが例示できる。
文字認支援識装置20は、例えば、入力部14のカメラ14a等を介して、10msといった一定の周期間隔の時系列で撮影中の撮像画像の画像データを受け付ける。受け付けられた撮影中の撮像画像の画像データは、例えば、時系列順に主記憶部12のバッファメモリ等に一時的に記憶される。バッファメモリ等に記憶された撮影中の撮像画像の画像データは、時系列順に読み出され、例えば、文字認識支援装置20のLCD15a等の表示画面に、撮影中の帳票の撮影状態を表すモニタ画像として表示される。文字認識支援装置20は、例えば、時系列順にバッファメモリ等から読み出された撮影中の撮像画像の画像データに対し、図7Aに例示の文字認識処理を行う。
図7Aに例示のフローチャートにおいて、文字認識支援装置20は、例えば、バッファメモリ等から読み出された撮影中の撮像画像の画像データについて画質評価処理を行う(S21)。画質評価処理は、例えば、評価用文字列DB201に登録された撮影中の帳票の評価用文字列のデータに基づいて行われる。画質評価処理では、例えば、画像領域内の撮影中の撮像画像の画像データが、少なくとも2隅以上の評価用領域において適正な位置に位置決めが行われていることが判定される。同時に、例えば、少なくとも2隅以上の評価用領域の文字認識の可否に基づいて、画像領域内の撮影中の撮像画像の画像データが、文字を認識するための十分な画質であるかが判定される。
文字認識支援装置20は、例えば、S21の画質評価処理の判定結果をS22の処理に引き渡す。なお、S21の画質評価処理は、図7Bで説明する。
文字認識支援装置20は、例えば、S21の画質評価処理から引き渡された判定結果に基づいて、処理中の撮像画像の画像データに帳票内の文字を認識するための十分な画質を有するか否かを判定する(S22)。処理中の撮像画像の画像データに対する十分な画質であるかの判定は、例えば、処理中の撮像画像の画像データに付加された“画質フラグ”のフラグ情報により行われる。
文字認識支援装置20は、例えば、処理中の撮像画像の“画質フラグ”に“1”のフラグ情報が付加されていない場合には(S22,“N”)、S23−S26の処理をスキップし、処理中の撮像画像に対する文字認識処理を終了する。文字認識支援装置20は、例えば、時系列順にバッファメモリ等から読み出された次の撮影中の撮像画像の画像データを対象として文字認識処理を継続する。図7Aに例示の文字認識処理は、例えば、帳票内に記述された文字認識が行われるまで繰り返し実行される。
一方、文字認識支援装置20は、例えば、処理中の撮像画像の“画質フラグ”に“1”のフラグ情報が付加されている場合には(S22,“Y”)、S23の帳票状態推定処理に移行する。
S23の帳票状態推定処理では、文字認識支援装置20は、例えば、2隅以上の評価用領域で文字認識された“文字列”と“評価文字列”との位置関係に基づいて、処理中の帳票の位置決めを行うための各種移動判定、歪み補正判定を行う。なお、歪み補正判定は、例えば、3隅以上の評価用領域で“評価文字列”が文字認識された場合に行われる。
文字認識支援装置20は、例えば、S23の帳票状態推定処理の各種移動判定、歪み補正判定の結果をフラグ情報として主記憶部12の所定の領域に一時的に記憶し、S24の状態表示処理に引き渡す。なお、S23の帳票状態推定処理は、図7C−7H、7Jで説明する。
S24の状態表示処理では、文字認識支援装置20は、例えば、S23の帳票状態推定処理で判定された並進移動、回転移動、奥行き方向の前後移動、歪み補正の要否を示す各種フラグ情報に基づいて、処理中の撮像画像に対する適正な撮影位置への支援表示を行う。
文字認識支援装置20は、例えば、適正な撮影位置を示す矩形状のガイド枠等を撮影中の撮像画像に重畳させ、文字認識支援装置20のLCD15a等のモニタ表示が行われる表示画面に表示する。また、文字認識支援装置20は、例えば、各種フラグ情報に対応した、画像領域内での撮像画像の移動方向を示す矢印等の表示部品を撮影中の撮像画像に重畳させ、モニタ表示が行われるLCD15a等の表示画面に表示する。なお、S24の状態表示処理は、図8A−8Eで説明する。
S25の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像の撮影位置が、画像領域内において適正な撮影位置に位置決めされた状態であるかを判定する。
文字認識支援装置20は、例えば、S23の帳票状態推定処理の結果、処理中の帳票の撮像画像の撮影位置が、画像領域内において適正な撮影位置に位置決めされた状態でない場合には(S25,“N”)、処理中の撮像画像に対する文字認識処理を終了する。文字認識支援装置20は、例えば、時系列順にバッファメモリ等から読み出された次の撮影中の撮像画像の画像データを対象として文字認識処理を継続する。図7Aに例示の文字認識処理は、例えば、帳票内に記述された文字認識が行われるまで繰り返し実行される。
一方、文字認識支援装置20は、例えば、S23の帳票状態推定処理の結果、処理中の帳票の撮像画像の撮影位置が、画像領域内において適正な撮影位置に位置決めされた状態である場合には(S25,“Y”)、S26の処理に移行する。
S26の処理では、文字認識支援装置20は、例えば、処理中の撮像画像の画像データを主記憶部12の所定の領域に一時的に記憶する。そして、文字認識支援装置20は、例えば、帳票が撮像された、図1Bに例示の画像領域Z1のデータ領域について文字認識を
行う。画像領域Z1内のデータ領域の文字認識は、例えば、検出データ処理部213により行われる。文字認識支援装置20は、例えば、文字認識により検出された帳票内の文字情報を検出データ文字列として、文字認識支援装置20の出力部15に出力し、処理中の撮像画像に対する文字認識処理を終了する。
ここで、文字認識支援装置20で実行されるS21の処理は、文字認識の対象となる矩形の認識対象体を含む撮像画像を受け付けるステップの一例である。また、文字認識支援装置20のCPU11等は、文字認識の対象となる矩形の認識対象体を含む撮像画像を受け付ける手段の一例としてS21の処理を実行する。
また、文字認識支援装置20で実行されるS23の処理は、前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定するステップの一例である。また、文字認識支援装置20のCPU11等は、前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定する手段の一例としてS23の処理を実行する。
また、文字認識支援装置20で実行されるS23の処理は、前記評価文字列の座標情報と、前記評価文字列に対応する前記所定領域内で文字認識された文字列との位置関係に基づいて、前記認識対象体の撮像画像の適正な撮影位置に対する複数の軸方向の補正移動の要否を判定する補正移動判定ステップの一例である。また、文字認識支援装置20のCPU11等は、前記評価文字列の座標情報と、前記評価文字列に対応する前記所定領域内で文字認識された文字列との位置関係に基づいて、前記認識対象体の撮像画像の適正な撮影位置に対する複数の軸方向の補正移動の要否を判定する補正移動判定手段の一例としてS23の処理を実行する。
また、文字認識支援装置20で実行されるS24の処理は、前記関係から前記矩形の認識対象体の姿勢を示す複数の軸のうち、少なくとも1軸について文字認識できるか否かを、利用者が識別可能な様態で表示する表示制御ステップの一例である。また、文字認識支援装置20のCPU11等は、前記関係から前記矩形の認識対象体の姿勢を示す複数の軸のうち、少なくとも1軸について文字認識できるか否かを、利用者が識別可能な様態で表示する表示制御手段の一例としてS24の処理を実行する。
[画質評価処理]
次に、図7Bに例示のフローチャートを参照し、図7Aに例示のS21の画質評価処理の詳細を説明する。図7Bに例示にフローチャートにおいて、文字認識支援装置20は、例えば、処理中の帳票の撮像画像の画像データに対し、“画質フラグ”を“0”とするフラグ情報を付与する(S31)。“画質フラグ”に設定されるフラグ情報は、例えば、2値状態を“0”、“1”等の単一ビットで識別する情報である。S31の処理では、文字認識支援装置20は、処理中の撮像画像の画像データに対し、初期値として“画質フラグ”を“0”とするフラグ情報の設定を行う。
S32の処理では、文字認識支援装置20は、例えば、評価用文字列DB201を参照し、撮影中の帳票に対応する評価用文字列のデータ(画質評価用文字列テーブル)の読み込みを行う。読み込まれた評価用文字列のデータは、例えば、主記憶部12の所定の領域に一時的に記憶される。
S33の処理では、文字認識支援装置20は、例えば、S32の処理で読み込んだ評価用文字列の画像領域内の座標データ“sx”、“sy”、“ex”、“ey”に基づいて、評価用領域の設定を行う。評価用領域の設定は、例えば、数式(2)、(3)に基づい
て行われる。文字認識支援装置20は、例えば、画像領域内の評価用領域について文字認識を行い、2隅以上の評価用領域における評価用文字列の文字認識が行われたかを判定する(S34)。
文字認識支援装置20は、例えば、2隅以上の評価用領域における評価用文字列の文字認識が行われた場合には(S34,“Y”)、S35の処理に移行する。S35の処理では、文字認識支援装置20は、例えば、処理中の撮像画像の画像データに対し、帳票内の文字を認識するための十分な画質であると判断し、“画質フラグ”のフラグ値に“1”を設定する。文字認識支援装置20は、処理中の画質評価処理を終了する。また、文字認識支援装置20は、例えば、2隅以上の評価用領域における評価用文字列の文字認識が行われない場合には(S34,“N”)、処理中の画質評価処理を終了する。
ここで、文字認識支援装置20で実行されるS32−S33の処理は、記憶部に登録された前記認識対象体中の複数の評価文字列の座標情報に基づいて、前記認識対象体を含む撮像画像内での3隅以上の所定領域を特定するステップの一例である。また、文字認識支援装置20のCPU11等は、記憶部に登録された前記認識対象体中の複数の評価文字列の座標情報に基づいて、前記認識対象体を含む撮像画像内での3隅以上の所定領域を特定する手段の一例としてS32−S33の処理を実行する。
また、文字認識支援装置20で実行されるS34の処理は、前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定するステップの一例である。また、文字認識支援装置20のCPU11等は、前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定する手段の一例としてS34の処理を実行する。
[帳票状態推定処理]
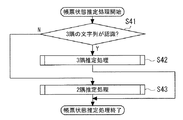
次に、図7C−7H、7Jに例示のフローチャートを参照し、図7Aに例示のS23の帳票状態推定処理の詳細を説明する。図7Cは、帳票状態推定処理の全体処理を示すフローチャートの例示である。
文字認識支援装置20は、例えば、2隅の評価用領域について文字認識が行われた場合には、該2隅の評価用領域で文字認識された“文字列”と“評価文字列”との位置関係に基づいて、処理中の帳票の位置決めを行うための各種移動判定を行う。また、文字認識支援装置20は、例えば、3隅の評価用領域について文字認識が行われた場合には、該2隅の評価用領域で文字認識された“文字列”と“評価文字列”との位置関係に基づいて、処理中の帳票の位置決めを行うための各種移動判定、歪み補正判定を行う。
図7Cに例示のフローチャートにおいて、文字認識支援装置20は、例えば、処理中の帳票の撮像画像(画像データ)について文字認識が行われた評価用領域の箇所が3隅であるか否かを判定する(S41)。
文字認識支援装置20は、例えば、処理中の帳票の撮像画像(画像データ)について文字認識が行われた評価用領域の箇所が3隅である場合には(S41,“Y”)、S42の3隅推定処理に移行する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像(画像データ)について文字認識が行われた評価用領域の箇所が2隅である場合には(S41,“N”)、S43の2隅推定処理に移行する。
文字認識支援装置20は、例えば、S42の3隅推定処理、或いは、S43の2隅推定処理により、処理中の帳票の位置決めを行うための各種移動、歪み補正の要否を判定し、
処理中の撮像画像に対する帳票状態推定処理を終了する。なお、S42の3隅推定処理は図7Eで説明し、S43の2隅推定処理は図7Dで説明する。
次に、図7Dに例示のフローチャートを参照し、図7Cに例示のS43の2隅推定処理の詳細を説明する。図7Dは、2隅推定処理の全体処理を示すフローチャートの例示である。2隅推定処理では、2隅の評価用領域で文字認識された“文字列”と“評価文字列”との位置関係に基づいて、処理中の帳票の位置決めを行うための並進移動、回転移動、奥行き方向の前後移動の要否の判定が行われる。なお、各種移動の要否判定は、並進移動、回転移動、奥行き方向の前後移動の順に行われる。
図7Dに例示のフローチャートにおいて、文字認識支援装置20は、例えば、2隅の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)と、“評価文字列”についての重心座標(Xgrav,Ygrav)を求める。そして、文字認識支援装置20は、例えば、“文字列”についての重心座標(X´grav,Y´grav)と“評価文字列”についての重心座標(Xgrav,Ygrav)との位置関係に基づいて、処理中の帳票の位置決めを行うための並進移動の要否を判定する(S51)。なお、S51の並進推定処理は、図7Fで説明する。
S51の並進推定処理では、例えば、処理中の帳票の撮像画像について、画像領域内の並進移動が求められる場合には、上下左右方向の各並進移動方向に応じて“並進フラグ”に“1”−“4”のフラグ情報が設定される。なお、処理中の帳票の撮像画像について、画像領域内の並進移動が求められない場合には、例えば、“並進フラグ”に“0”のフラグ情報が設定される。
S52の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“並進フラグ”のフラグ情報が“0”であるか否かの判定を行う。文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“並進フラグ”のフラグ情報が“0”である場合には(S52,“N”)、S53の回転推定処理に移行する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“並進フラグ”のフラグ情報が“0”でない場合には(S52,“Y”)、S53−S56の処理をスキップし、処理中の2隅推定処理を終了する。
S53の回転推定処理では、文字認識支援装置20は、例えば、2隅の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)を中心とした、“文字列”毎の重心座標(X´char,Y´char)方向への時計回りの角度を求める。また、文字認識支援装置20は、例えば、文字認識された2隅の評価用領域に対応する“評価文字列”についての重心座標(Xgrav,Ygrav)を中心とした、“評価文字列”毎の重心座標(Xchar,Ychar)方向への時計回りの角度を求める。そして、文字認識支援装置20は、例えば、“文字列”毎の重心座標(X´char,Y´char)方向への時計回りの角度、“評価文字列” 毎の重心座標(Xchar,Ychar)方向への時計回りの角度に基づいて、処
理中の帳票の位置決めを行うための回転移動の要否を判定する。なお、S53の回転推定処理は、図7Gで説明する。
S53の回転推定処理では、例えば、処理中の帳票の撮像画像について、画像領域内の回転移動が求められる場合には、時計回り、反時計回りの各回転移動方向に応じて“回転フラグ”に“1”−“2”のフラグ情報が設定される。なお、処理中の帳票の撮像画像について、画像領域内の回転移動が求められない場合には、例えば、“回転フラグ”に“0”のフラグ情報が設定される。
S54の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像につい
て設定された“回転フラグ”のフラグ情報が“0”であるか否かの判定を行う。文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“回転フラグ”のフラグ情報が“0”である場合には(S54,“N”)、S55の前後推定処理に移行する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“回転フラグ”のフラグ情報が“0”でない場合には(S54,“Y”)、S55−S56の処理をスキップし、処理中の2隅推定処理を終了する。
S55の前後推定処理では、文字認識支援装置20は、例えば、2隅の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)と、各“文字列”の重心座標(X´char,Y´char)との距離を求める。また、文字認識支援装置20は、例えば、文字認識された2隅の評価用領域に対応する“評価文字列”についての重心座標(Xgrav,Ygrav)と、各“評価文字列”の重心座標(Xchar,Ychar)との距離を求める。そして、文字認識支援装置20は、例えば、各“文字列”の重心座標(X´char,Y´char)への距離、各“評価文字列”の重心座標(Xchar,Ychar)への距離に基づいて、処理中の帳票の位置決めを行うための奥行き方向への前後移動の要否を判定する。なお、S55の前後推定処理は、図7Hで説明する。
S55の前後推定処理では、例えば、処理中の帳票の撮像画像について、奥行き方向への前後移動が求められる場合には、奥行き前方向、奥行き後方向の各移動方向に応じて“前後フラグ”に“1”−“2”のフラグ情報が設定される。なお、処理中の帳票の撮像画像について、奥行き方向への前後移動が求められない場合には、例えば、“前後フラグ”に“0”のフラグ情報が設定される。
S56の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“前後フラグ”のフラグ情報が“0”であるか否かの判定を行う。文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“前後フラグ”のフラグ情報が“0”である場合には(S56,“N”)、フラグ情報を主記憶部12の所定の領域に一時的に記憶し、処理中の2隅推定処理を終了する。また、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“前後フラグ”のフラグ情報が“0”でない場合には(S56,“Y”)、処理中の2隅推定処理を終了する。
次に、図7Eに例示のフローチャートを参照し、図7Cに例示のS42の3隅推定処理の詳細を説明する。図7Eは、3隅推定処理の全体処理を示すフローチャートの例示である。3隅推定処理では、3隅の評価用領域で文字認識された“文字列”と“評価文字列”との位置関係に基づいて、処理中の帳票の位置決めを行うための並進移動、回転移動、奥行き方向の前後移動、歪み補正の要否の判定が行われる。なお、各種移動の要否判定は、並進移動、回転移動、奥行き方向の前後移動の順に行われる。また、歪み補正の要否判定は、奥行き方向の前後移動の要否の判定後に行われる。
図7Eに例示の3隅推定処理において、S51−S55の処理では、文字認識支援装置20は、例えば、3隅の評価用領域で文字認識された“文字列”と“評価文字列”について、図7Dに例示のS51−S55の処理を実行する。なお、S56aの処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“前後フラグ”のフラグ情報が“0”であるか否かの判定を行う。
文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“回転フラグ”のフラグ情報が“0”でない場合には(S56a,“Y”)、S57−S58の処理をスキップし、処理中の3隅推定処理を終了する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“前後回転フラグ”のフラグ情報が“0”である場合には(S56a,“N”)、S57の歪み推定処理に移行する。
S57の歪み推定処理では、文字認識支援装置20は、例えば、3隅の評価用領域で文字認識された“文字列1”と“文字列2”との重心座標間の距離“C´12”を求める。また、文字認識支援装置20は、例えば、“文字列1”と“文字列3”との重心座標間の距離“C´13”を求める。同様に、文字認識支援装置20は、例えば、3隅の評価用文字列に内、“評価文字列1”と“評価文字列2”との重心座標間の距離“C12”、“評価文字列1”と“評価文字列3”との重心座標間の距離“C13”との距離を求める。
そして、文字認識支援装置20は、例えば、評価用領域で文字認識された“C´12”、“C´13”とそれぞれの評価用領域に対応する“評価文字列”の“C12”、“C13”とのそれぞれの距離比に基づいて、処理中の撮像画像に対する歪み補正の要否を判定する。なお、S57の歪み推定処理は、図7Jで説明する。
S57の歪み推定処理では、例えば、処理中の帳票の撮像画像について、歪み補正を行うための補正移動が求められる場合には、左右方向、上下方向の各補正移動方向に応じて“歪みフラグ”に“1”−“4”のフラグ情報が設定される。なお、処理中の帳票の撮像画像について、歪み補正を行うための補正移動が求められない場合には、例えば、“歪みフラグ”に“0”のフラグ情報が設定される。
S58の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“歪みフラグ”のフラグ情報が“0”であるか否かの判定を行う。文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“歪みフラグ”のフラグ情報が“0”である場合には(S58,“N”)、フラグ情報を主記憶部12の所定の領域に一時的に記憶し、処理中の3隅推定処理を終了する。また、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“歪みフラグ”のフラグ情報が“0”でない場合には(S58,“Y”)、処理中の3隅推定処理を終了する。
(並進推定処理)
図7Fに例示のフローチャートを参照し、図7D,7Eに例示のS51の並進推定処理の詳細を説明する。図7Fに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“並進フラグ”に“0”のフラグ情報を設定する(S61)。そして、文字認識支援装置20は、例えば、2隅以上の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)、該評価用領域に対応する“評価文字列”についての重心座標(Xgrav,Ygrav)を算出する(S62)。
文字認識支援装置20は、例えば、数式(4)−(7)に基づいて、2隅以上の評価用領域に対応する“評価文字列”についての重心座標(Xgrav,Ygrav)を算出する。また、文字認識支援装置20は、例えば、数式(4)−(5)、(6a)−(7a)に基づいて、2隅以上の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)を算出する。なお、重心座標(Xgrav,Ygrav)、(X´grav,Y´grav)については、数式(4)−(7)、(6a)−(7a)で説明した。
S63−S6Aの処理では、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係に基づいて、処理中の帳票の撮像画像に対する上下左右方向の並進移動の要否を判定する。
文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係について、数式(8)の関係に基づいて処理中の帳票の撮像画像に対する左右方向の並進移動の可否を判定する。また、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係について、数式(9)の関係に基づいて処理中の帳票の撮像画像に対
する左右方向の並進移動の可否を判定する。
並進移動の要否の判定の結果は、例えば、“並進フラグ”に設定される“1”−“4”のフラグ情報として反映される。なお、上下左右方向の並進移動の要否の判定については、数式(8)、(9)で説明した。
S63の処理では、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係について、(Xgrav−Thx)>X´gravの関係を満たすか否かを判定する。文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係が(Xgrav−Thx)>X´gravの関係を満たす場合には(S63,“Y”)、“並進フラグ”に“1”のフラグ情報を設定する(S67)。一方、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係が(Xgrav−Thx)>X´gravの関係を満たさない場合には(S63,“N”)、S64の処理に移行する。
S64の処理では、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係について、X´grav>(Xgrav+Thx)の関係を満たすか否かを判定する。文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係がX´grav>(Xgrav+Thx)の関係を満たす場合には(S64,“Y”)、“並進フラグ”に“2”のフラグ情報を設定する(S68)。一方、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係がX´grav>(Xgrav+Thx)の関係を満たさない場合には(S64,“N”)、S65の処理に移行する。
S65の処理では、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係について、(Ygrav−Thy)>Y´gravの関係を満たすか否かを判定する。文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係が(Ygrav−Thy)>Y´gravの関係を満たす場合には(S65,“Y”)、“並進フラグ”に“3”のフラグ情報を設定する(S69)。一方、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係が(Ygrav−Thy)>Y´gravの関係を満たさない場合には(S65,“N”)、S66の処理に移行する。
S66の処理では、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係について、Y´grav>(Ygrav+Thy)の関係を満たすか否かを判定する。文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係がY´grav>(Ygrav+Thy)の関係を満たす場合には(S66,“Y”)、“並進フラグ”に“3”のフラグ情報を設定する(S6A)。一方、文字認識支援装置20は、例えば、S62の処理で算出した各重心座標の位置関係がY´grav>(Ygrav+Thy)の関係を満たさない場合には(S66,“N”)、処理中の並進推定処理を終了する。
ここで、文字認識支援装置20で実行されるS61−S6Aの処理は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心との位置関係に基づいて、前記認識対象体の撮像画像に対する、上下左右の何れか一の方向についての並進移動の要否を判定する、ステップの一例である。また、文字認識支援装置20のCPU11等は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心との位置関係に基づいて、前記認識対象体の撮像画像に対する、上下左右の何れか一の方向についての並進移動の要否を判定する、手段の一例としてS61−S6Aの処理を実行する。
(回転推定処理)
図7Gに例示のフローチャートを参照し、図7D,7Eに例示のS53の回転推定処理
の詳細を説明する。図7Gに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“回転フラグ”に“0”のフラグ情報を設定する(S71)。そして、文字認識支援装置20は、例えば、2隅以上の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)、該評価用領域に対応する“評価文字列”についての重心座標(Xgrav,Ygrav)を算出する(S72)。S72の処理では、例えば、図7Fに例示のフローチャートのS62の処理と同様の処理が行われる。
S73の処理では、文字認識支援装置20は、例えば、重心座標(X´grav,Y´grav)と2隅以上の評価用領域で文字認識された“文字列”毎の重心座標(X´char,Y´char)との時計回り方向の角度(θ´char)を算出する。また、文字認識支援装置20は、例えば、重心座標(Xgrav,Ygrav)と2隅以上の評価用領域に対応する“評価文字列”毎の重心座標(Xchar,Ychar)との時計回り方向の角度(θchar)を算出する。なお、“文字列”毎の角度(θ´char)、“評価文字列”毎の角度(θchar)については、数式(10)、(10a)で説明した。
S74−S77の処理では、文字認識支援装置20は、例えば、S73の処理で算出した“文字列”毎の角度(θ´char)と“評価文字列”毎の角度(θchar)との関係に基づいて、処理中の帳票の撮像画像に対する回転移動の要否を判定する。回転移動の要否の判定は、例えば、3隅の評価用領域で文字認識が行われた場合には、数式(10)の関係に基づいて行われる。また、例えば、2隅の評価用領域で文字認識が行われた場合には、数式(10a)の関係に基づいて回転移動の要否の判定が行われる。
なお、図7Gに例示のS74−S77の処理は、“評価文字列1”、“評価文字列2”の2隅の評価用領域で文字認識が行われた場合の処理例である。
S74の処理では、文字認識支援装置20は、例えば、S73の処理で算出した“文字列”毎の角度(θ´char)と“評価文字列”毎の角度(θchar)との関係が、(θchar1
+θchar2−Thθ)>(θ´char1+θ´char2)の関係を満たすか否かを判定する。
文字認識支援装置20は、例えば、S73の処理で算出した各角度の関係が(θchar1
+θchar2−Thθ)>(θ´char1+θ´char2)の関係を満たす場合には(S74,“
Y”)、“回転フラグ”に“1”のフラグ情報を設定する(S76)。一方、文字認識支援装置20は、例えば、S73の処理で算出した各角度の関係が(θchar1+θchar2−Thθ)>(θ´char1+θ´char2)の関係を満たさない場合には(S74,“N”)、S75の処理に移行する。
なお、S74の処理において、文字認識が行われた2隅の評価用領域が“評価文字列1”、“評価文字列3”の場合には、例えば、文字認識支援装置20は、(θchar1+θchar3−Thθ)>(θ´char1+θ´char3)の関係を満たすか否かを判定すればよい。同様にして、文字認識が行われた2隅の評価用領域が“評価文字列2”、“評価文字列3”の場合には、文字認識支援装置20は、例えば、(θchar2+θchar3−Thθ)>(θ´char2+θ´char3)の関係を満たすか否かを判定すればよい。
また、S74の処理において、3隅の評価用領域で文字認識が行われた場合には、文字認識支援装置20は、例えば、(θchar1+θchar2+θchar3−Thθ)>(θ´char1+θ´char2+θ´char3)の関係を満たすか否かを判定すればよい。
図7GのS75の処理では、文字認識支援装置20は、例えば、S73の処理で算出した文字列”毎の角度(θ´char)と“評価文字列”毎の角度(θchar)との関係が、(θ´char1+θ´char2)>(θchar1+θchar2+Thθ)の関係を満たすか否かを判定する
。
文字認識支援装置20は、例えば、S73の処理で算出した各角度の関係が(θ´char1+θ´char2)>(θchar1+θchar2+Thθ)の関係を満たす場合には(S75,“Y”)、“回転フラグ”に“2”のフラグ情報を設定する(S77)。一方、文字認識支援装置20は、例えば、S73の処理で算出した各角度の関係が(θ´char1+θ´char2)>(θchar1+θchar2+Thθ)の関係を満たさない場合には(S75,“N”)、処理中の回転推定処理を終了する。
なお、S75の処理において、文字認識が行われた2隅の評価用領域が“評価文字列1”、“評価文字列3”の場合には、例えば、文字認識支援装置20は、(θ´char1+θ
´char3)>(θchar1+θchar3+Thθ)の関係を満たすか否かを判定すればよい。同
様にして、文字認識が行われた2隅の評価用領域が“評価文字列2”、“評価文字列3”の場合には、文字認識支援装置20は、例えば、(θ´char2+θ´char3)>(θchar2
+θchar3+Thθ)の関係を満たすか否かを判定すればよい。
また、S75の処理において、3隅の評価用領域で文字認識が行われた場合には、文字認識支援装置20は、例えば、(θ´char1+θ´char2+θ´char3)>(θchar1+θchar2+θchar3+Thθ)の関係を満たすか否かを判定すればよい。
ここで、文字認識支援装置20で実行されるS71−S77の処理は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心から該文字認識された文字列毎の重心方向への角度と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心から該評価文字列毎の重心方向への角度との相対関係に基づいて、前記認識対象体の撮像画像に対する、時計回りまたは反時計回りの回転移動の要否を判定するステップの一例である。また、文字認識支援装置20のCPU11等は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心から該文字認識された文字列毎の重心方向への角度と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心から該評価文字列毎の重心方向への角度との相対関係に基づいて、前記認識対象体の撮像画像に対する、時計回りまたは反時計回りの回転移動の要否を判定する手段の一例としてS71−S77の処理を実行する。
(前後推定処理)
図7Hに例示のフローチャートを参照し、図7D,7Eに例示のS55の前後推定処理の詳細を説明する。図7Hに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“前後フラグ”に“0”のフラグ情報を設定する(S81)。そして、文字認識支援装置20は、例えば、2隅以上の評価用領域で文字認識された“文字列”についての重心座標(X´grav,Y´grav)、該評価用領域に対応する“評価文字列”についての重心座標(Xgrav,Ygrav)を算出する(S82)。S82の処理では、例えば、図7Fに例示のフローチャートのS62の処理と同様の処理が行われる。
S83の処理では、文字認識支援装置20は、例えば、重心座標(X´grav,Y´grav)と2隅以上の評価用領域で文字認識された“文字列”毎の重心座標(X´char,Y´char)との距離(D´char)を算出する。また、文字認識支援装置20は、例えば、重心座標(Xgrav,Ygrav)と2隅以上の評価用領域に対応する“評価文字列”毎の重心座標(Xchar,Ychar)との距離(Dchar)を算出する。なお、“文字列”毎の重心座標間の距離(D´char)、“評価文字列”毎の重心座標間の距離(Dchar)については、数式(11)、(11a)で説明した。
S84−S87の処理では、文字認識支援装置20は、例えば、S83の処理で算出し
た“文字列”毎の距離(D´char)と“評価文字列”毎の距離(Dchar)との関係に基づいて、処理中の帳票の撮像画像に対する奥行き方向の前後移動の要否を判定する。奥行き方向の前後移動の要否の判定は、例えば、3隅の評価用領域で文字認識が行われた場合には、数式(11)の関係に基づいて行われる。また、例えば、2隅の評価用領域で文字認識が行われた場合には、数式(11a)の関係に基づいて奥行き方向の前後移動の要否の判定が行われる。
なお、図7Hに例示のS84−S87の処理は、“評価文字列1”、“評価文字列2”の2隅の評価用領域で文字認識が行われた場合の処理例である。
S84の処理では、文字認識支援装置20は、例えば、S83の処理で算出した“文字列”毎の距離(D´char)と“評価文字列”毎の距離(Dchar)との関係が、(Dchar1
+Dchar2−Thd)>(D´char1+D´char2)の関係を満たすか否かを判定する。
文字認識支援装置20は、例えば、S83の処理で算出した各距離の関係が(Dchar1
+Dchar2−Thd)>(D´char1+D´char2)の関係を満たす場合には(S84,“
Y”)、“前後フラグ”に“1”のフラグ情報を設定する(S86)。一方、文字認識支援装置20は、例えば、S83の処理で算出した各距離の関係が(Dchar1+Dchar2−Thd)>(D´char1+D´char2)の関係を満たさない場合には(S84,“N”)、S85の処理に移行する。
なお、S84の処理において、文字認識が行われた2隅の評価用領域が“評価文字列1”、“評価文字列3”の場合には、例えば、文字認識支援装置20は、(Dchar1+Dchar3−Thd)>(D´char1+D´char3)の関係を満たすか否かを判定すればよい。同様にして、文字認識が行われた2隅の評価用領域が“評価文字列2”、“評価文字列3”の場合には、文字認識支援装置20は、例えば、(Dchar2+Dchar3−Thd)>(D´char2+D´char3)の関係を満たすか否かを判定すればよい。
また、S84の処理において、3隅の評価用領域で文字認識が行われた場合には、文字認識支援装置20は、例えば、(Dchar1+Dchar2+Dchar3−Thd)>(D´char1+D´char2+D´char3)の関係を満たすか否かを判定すればよい。
図7HのS85の処理では、文字認識支援装置20は、例えば、S83の処理で算出した“文字列”毎の距離(D´char)と“評価文字列”毎の距離(Dchar)との関係が、(D´char1+D´char2)>(Dchar1+Dchar2+Thd)の関係を満たすか否かを判定する。
文字認識支援装置20は、例えば、S83の処理で算出した各距離の関係が(D´char1+D´char2)>(Dchar1+Dchar2+Thd)の関係を満たす場合には(S85,“Y”)、“前後フラグ”に“2”のフラグ情報を設定する(S87)。一方、文字認識支援装置20は、例えば、S83の処理で算出した各距離の関係が(D´char1+D´char2)>(Dchar1+Dchar2+Thd)の関係を満たさない場合には(S85,“N”)、処理中の前後推定処理を終了する。
なお、S85の処理において、文字認識が行われた2隅の評価用領域が“評価文字列1”、“評価文字列3”の場合には、例えば、文字認識支援装置20は、(D´char1+D
´char3)>(Dchar1+Dchar3+Thd)の関係を満たすか否かを判定すればよい。同
様にして、文字認識が行われた2隅の評価用領域が“評価文字列2”、“評価文字列3”の場合には、文字認識支援装置20は、例えば、(D´char2+D´char3)>(Dchar2
+Dchar3+Thd)の関係を満たすか否かを判定すればよい。
また、S84の処理において、3隅の評価用領域で文字認識が行われた場合には、文字認識支援装置20は、例えば、(D´char1+D´char2+D´char3)>(Dchar1+Dchar2+Dchar3+Thd)の関係を満たすか否かを判定すればよい。
ここで、文字認識支援装置20で実行されるS81−S87の処理は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と該文字認識された文字列毎の重心との距離、及び、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心と該評価文字列毎の重心との距離の相対関係に基づいて、前記認識対象体の撮像画像の画像サイズの拡大方向または縮小方向についての移動の要否を判定するステップの一例である。また、文字認識支援装置20のCPU11等は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と該文字認識された文字列毎の重心との距離、及び、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心と該評価文字列毎の重心との距離の相対関係に基づいて、前記認識対象体の撮像画像の画像サイズの拡大方向または縮小方向についての移動の要否を判定する手段の一例としてS81−S87の処理を実行する。
(歪み推定処理)
図7Jに例示のフローチャートを参照し、図7Eに例示のS57の歪み推定処理の詳細を説明する。文字認識支援装置20は、例えば、3隅の評価用領域で文字認識された場合に、図7Jに例示の、撮影中の帳票の撮像画像についての歪み推定処理を行う。
図7Jに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“歪みフラグ”に“0”のフラグ情報を設定する(S91)。
S92の処理では、文字認識支援装置20は、例えば、帳票の左右方向の辺と平行する“評価文字列1”,“評価文字列2”の重心座標間の距離“C12”、帳票の上下方向の辺と平行する“評価文字列1”,“評価文字列3”の重心座標間の距離“C13”を算出する。また、文字認識支援装置20は、3隅の評価用領域で文字認識された“文字列1”、“文字列2”についての重心座標間の距離“C´12”、“文字列1”、“文字列3”についての重心座標間の距離“C´13”を算出する。
S93の処理では、文字認識支援装置20は、例えば、S92の処理で算出した各距離に基づいて、|1−(C´12/C12)|、及び、|1−(C´13/C13)|の距離比を算出する。そして、文字認識支援装置20は、例えば、算出された|1−(C´12/C12)|、及び、|1−(C´13/C13)|の大小関係が、|1−(C´12/C12)|>|1−(C´13/C13)|を満たすことを判定する。
文字認識支援装置20は、例えば、|1−(C´12/C12)|>|1−(C´13/C13)|の大小関係を満たす場合には(S93,“Y”)、S94−S95,S98−S99の処理を実行し、処理中の帳票の撮像画像に対する歪み推定処理を終了する。一方、文字認識支援装置20は、例えば、|1−(C´12/C12)|>|1−(C´13/C13)|の大小関係を満たさない場合には(S93,“N”)、S96−S97,S9A−S9Bの処理を実行し、処理中の帳票の撮像画像に対する歪み推定処理を終了する。
図7Jに例示のS94−S95,S98−S99の処理では、例えば、処理中の帳票の撮像画像に対する左右方向の歪み補正の要否が判定される。処理中の帳票の撮像画像に対する左右方向の歪み補正の要否の判定は、例えば、数式(12)の関係に基づいて、それぞれの方向についての歪み補正の要否が判定される。なお、左右方向の歪み補正については、数式(12)で説明した。
また、図7Jに例示のS96−S97,S9A−S9Bの処理では、例えば、処理中の帳票の撮像画像に対する上下方向の歪み補正の要否が判定される。処理中の帳票の撮像画像に対する上下方向の歪み補正の要否の判定は、例えば、数式(13)の関係に基づいて、それぞれの方向についての歪み補正の要否が判定される。なお、上下方向の歪み補正については、数式(13)で説明した。
S94の処理では、文字認識支援装置20は、例えば、(1−(C´12/C12))が、−Thc>(1−(C´12/C12))の関係を満たすか否かを判定する。文字認識支援装置20は、例えば、(1−(C´12/C12))が、−Thc>(1−(C´12/C12))の関係を満たす場合には(S94,“Y”)、“歪みフラグ”に“1”のフラグ情報を設定する(S98)。一方、文字認識支援装置20は、例えば、(1−(C´12/C12))が、−Thc>(1−(C´12/C12))の関係を満たさない場合には(S94,“N”)、S95の処理に移行する。
S95の処理では、文字認識支援装置20は、例えば、(1−(C´12/C12))が、(1−(C´12/C12))>Thcの関係を満たすか否かを判定する。文字認識支援装置20は、例えば、(1−(C´12/C12))が、(1−(C´12/C12))>Thcの関係を満たす場合には(S95,“Y”)、“歪みフラグ”に“2”のフラグ情報を設定する(S99)。一方、文字認識支援装置20は、例えば、(1−(C´12/C12))が、(1−(C´12/C12))>Thcの関係を満たさない場合には(S95,“N”)、処理中の帳票の撮像画像に対する歪み推定処理を終了する。
S96の処理では、文字認識支援装置20は、例えば、(1−(C´13/C13))が、−Thc>(1−(C´13/C13))の関係を満たすか否かを判定する。文字認識支援装置20は、例えば、(1−(C´13/C13))が、−Thc>(1−(C´13/C13))の関係を満たす場合には(S96,“Y”)、“歪みフラグ”に“3”のフラグ情報を設定する(S9A)。一方、文字認識支援装置20は、例えば、(1−(C´13/C13))が、−Thc>(1−(C´13/C13))の関係を満たさない場合には(S96,“N”)、S97の処理に移行する。
S97の処理では、文字認識支援装置20は、例えば、(1−(C´13/C13))が、(1−(C´13/C13))>Thcの関係を満たすか否かを判定する。文字認識支援装置20は、例えば、(1−(C´13/C13))が、(1−(C´13/C13))>Thcの関係を満たす場合には(S97,“Y”)、“歪みフラグ”に“4”のフラグ情報を設定する(S9B)。一方、文字認識支援装置20は、例えば、(1−(C´13/C13))が、(1−(C´13/C13))>Thcの関係を満たさない場合には(S97,“N”)、処理中の帳票の撮像画像に対する歪み推定処理を終了する。
ここで、文字認識支援装置20で実行されるS91−S9Bの処理は、3隅以上の所定領域内の部分画像から文字認識された第1文字列と第2文字列との間の第1文字列間距離と、前記第1文字列と第2文字列とに対応する第1評価文字列と第2評価文字列との間の第1評価文字列間距離との第1距離比、及び、前記部分画像から文字認識された第1文字列と第3文字列との間の第2文字列間距離と、前記第1文字列と第3文字列とに対応する第1評価文字列と第3評価文字列との間の第2評価文字列間距離との第2距離比に基づい
て、前記認識対象体の撮像画像の上下左右の何れか一の方向についての歪みを補正する移動の要否を判定するステップの一例である。また、文字認識支援装置20のCPU11等は、3隅以上の所定領域内の部分画像から文字認識された第1文字列と第2文字列との間の第1文字列間距離と、前記第1文字列と第2文字列とに対応する第1評価文字列と第2評価文字列との間の第1評価文字列間距離との第1距離比、及び、前記部分画像から文字認識された第1文字列と第3文字列との間の第2文字列間距離と、前記第1文字列と第3文字列とに対応する第1評価文字列と第3評価文字列との間の第2評価文字列間距離との第2距離比に基づいて、前記認識対象体の撮像画像の上下左右の何れか一の方向についての歪みを補正する移動の要否を判定する手段の一例としてS91−S9Bの処理を実行する。
[状態表示処理]
次に、図8A−8Eに例示のフローチャートを参照し、図7Aに例示のS24の状態表示処理の詳細を説明する。図8Aは、状態表示処理の全体処理を示すフローチャートの例示である。
図8Aに例示の状態表示処理では、例えば、図7Aに例示のS23の帳票状態推定処理で対応付けられた、並進移動、回転移動、奥行き方向の前後移動、歪み補正の各種フラグ情報に基づいて、処理中の帳票の撮像画像に対する位置決め支援が行われる。処理中の帳票の撮像画像に対する位置決め支援は、例えば、適正な撮影位置を示すガイド枠、画像領域内での撮像画像の移動方向を示す矢印、マーカー等の表示部品により行われる。文字認識支援装置20は、例えば、適正な撮影位置を示すガイド枠、画像領域内での撮像画像の移動方向を示す矢印等の表示部品を、撮影中の帳票の撮像画像に重畳させ、モニタ表示が行われるLCD15a等の表示画面に表示する。
図8Aに例示のフローチャートにおいて、文字認識支援装置20は、例えば、処理中の帳票の撮像画像(画像データ)について、画像領域内での並進移動の要否の判定を行う(S101)。処理中の帳票の撮像画像についての、画像領域内での並進移動の要否の判定は、例えば、処理中の撮像画像に設定された“並進フラグ”のフラグ情報が“並進フラグ>0”の関係を満たすか否かにより行われる。
文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“並進フラグ”のフラグ情報が“並進フラグ>0”の関係を満たす場合には(S101,“Y”)、S102の並進表示処理を実行し、処理中の状態表示処理を終了する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“並進フラグ”のフラグ情報が“並進フラグ>0”の関係を満たさない場合には(S101,“N”)、S103に移行する。なお、S102の並進表示処理は、図8Bで説明する。
S103の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“回転フラグ”のフラグ情報が、“回転フラグ>0”の関係を満たすか否かで、画像領域内での回転移動の要否の判定を行う。
文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“回転フラグ”のフラグ情報が“回転フラグ>0”の関係を満たす場合には(S103,“Y”)、S104の回転表示処理を実行し、処理中の状態表示処理を終了する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“回転フラグ”のフラグ情報が“回転フラグ>0”の関係を満たさない場合には(S103,“N”)、S105に移行する。なお、S104の並進表示処理は、図8Cで説明する。
S105の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“前後フラグ”のフラグ情報が、“前後フラグ>0”の関係を満たすか否かで、画像領域内における奥行き方向の前後移動の要否の判定を行う。
文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“前後フラグ”のフラグ情報が“前後フラグ>0”の関係を満たす場合には(S105,“Y”)、S106の前後表示処理を実行し、処理中の状態表示処理を終了する。一方、文字認識支援装
置20は、例えば、処理中の帳票の撮像画像についての“前後フラグ”のフラグ情報が“前後フラグ>0”の関係を満たさない場合には(S105,“N”)、S107に移行する。なお、S106の前後表示処理は、図8Dで説明する。
S107の処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像について設定された“歪みフラグ”のフラグ情報が、“歪みフラグ>0”の関係を満たすか否かで、画像領域内における歪み補正の要否の判定を行う。
文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“歪みフラグ”のフラグ情報が“歪みフラグ>0”の関係を満たす場合には(S107,“Y”)、S108の歪み表示処理を実行し、処理中の状態表示処理を終了する。一方、文字認識支援装置20は、例えば、処理中の帳票の撮像画像についての“歪みフラグ”のフラグ情報が“歪みフラグ>0”の関係を満たさない場合には(S107,“N”)、S108の歪み表示処理をスキップし、処理中の状態表示処理を終了する。なお、S108の歪み表示処理は、図8Eで説明する。
(並進表示処理)
図8Bに例示のフローチャートを参照し、図8Aに例示のS102の並進表示処理の詳細を説明する。図8Bに例示の並進表示処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像に重畳させて、適正な撮影位置を示すガイド枠を表示する。そして、文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像がガイド枠方向に並進移動するよう、移動方向を示す矢印等の表示部品を処理中の帳票の撮像画像に重畳させて表示する。移動方向を示す矢印等の表示部品は、例えば、並進移動の方向に対応する。
文字認識支援装置20では、処理中の帳票の撮像画像に重畳させて表示された、適正な撮影位置を示すガイド枠、画像領域内の帳票の撮像画像の移動方向を示す矢印等の表示部品により、並進移動に係る位置決め支援が行われる。なお、並進移動に係る位置決め支援については、図6Dで説明した。
図8Bに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が、“1”であることを判定する(S111)。文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が“1”である場合には(S111,“Y”)、S112の処理に移行する。S112の処理では、例えば、文字認識支援装置20は、カメラ14a等を左方向に移動させ画像領域内の帳票の撮像画像が右方向に移動するよう、移動方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が“1”でない場合には(S111,“N”)、S113の処理に移行し、“並進フラグ”に設定されたフラグ情報が、“2”であることを判定する。
文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が“2”である場合には(S113,“Y”)、S114の処理に移行する。S114の処理では、例えば、文字認識支援装置20は、カメラ14a等を右方向に移動させ画像領域内の帳票の撮像画像が左方向に移動するよう、移動方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が“2”でない場合には(S113,“N”)、S115の処理に移行し、“並進フラグ”に設定されたフラグ情報が、“3”であることを判定する。
文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が“3”である場合には(S115,“Y”)、S116の処理に移行する。S116の処理では、例えば、文字認識支援装置20は、カメラ14a等を上方向に移動させ画像領域内の帳票の撮像画像が下方向に移動するよう、移動方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“並進フラグ”に設定されたフラグ情報が“3”でない場合には(S115,“N”)、S117の処理に移行する。S117の処理では、例えば、文字認識支援装置20は、カメラ14a等を下方向に移動させ画像領域内の帳票の撮像画像が上方向に移動するよう、移動方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
(回転表示処理)
図8Cに例示のフローチャートを参照し、図8Aに例示のS104の回転表示処理の詳細を説明する。図8Cに例示の回転表示処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像に重畳させて、適正な撮影位置を示すガイド枠を表示する。そして、文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像がガイド枠方向に回転移動するよう、回転方向を示す矢印等の表示部品を処理中の帳票の撮像画像に重畳させて表示する。回転方向を示す矢印等の表示部品は、例えば、撮像画像の回転方向(時計回り、反時計回り)に対応する。
文字認識支援装置20では、処理中の帳票の撮像画像に重畳させて表示された、適正な撮影位置を示すガイド枠、画像領域内の帳票の撮像画像の回転方向を示す矢印等の表示部品により、回転移動に係る位置決め支援が行われる。なお、回転移動に係る位置決め支援については、図6Eで説明した。
図8Cに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“回転フラグ”に設定されたフラグ情報が、“1”であることを判定する(S121)。文字認識支援装置20は、例えば、“回転フラグ”に設定されたフラグ情報が“1”である場合には(S121,“Y”)、S122の処理に移行する。S122の処理では、例えば、文字認識支援装置20は、カメラ14a等を左方向(時計回り)に回転させ画像領域内の帳票の撮像画像がガイド枠に合致するよう、回転方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“回転フラグ”に設定されたフラグ情報が“1”でない場合には(S121,“N”)、S123の処理に移行する。S123の処理では、例えば、文字認識支援装置20は、カメラ14a等を右方向(反時計回り)に回転させ画像領域内の帳票の撮像画像がガイド枠に合致するよう、回転方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
(前後表示処理)
図8Dに例示のフローチャートを参照し、図8Aに例示のS106の奥行き方向の前後表示処理の詳細を説明する。図8Dに例示の前後表示処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像に重畳させて、適正な撮影位置を示すガイド枠を表示する。そして、文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像がガイド枠に合致するよう、撮像画像のサイズが拡大・縮小する移動方向を示す矢印等の表示部品を処理中の帳票の撮像画像に重畳させて表示する。移動方向を示す矢印等の表示部品は、例えば、撮像画像のサイズの拡大方向、縮小方向に対応する。
文字認識支援装置20では、処理中の帳票の撮像画像に重畳させて表示された、適正な撮影位置を示すガイド枠、画像領域内の帳票の撮像画像の拡大・縮小方向を示す矢印等の表示部品により、奥行き方向の前後移動に係る位置決め支援が行われる。なお、奥行き方向の前後移動に係る位置決め支援については、図6Fで説明した。
図8Dに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“前後フラグ”に設定されたフラグ情報が、“1”であることを判定する(S131)。文字認識支援装置20は、例えば、“前後フラグ”に設定されたフラグ情報が“1”である場合には(S131,“Y”)、S132の処理に移行する。S132の処理では、例えば、文字認識支援装置20は、カメラ14a等を帳票に近づけるよう移動させ、画像領域内の帳票の撮像画像のサイズが拡大しガイド枠に合致するよう、移動方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“前後フラグ”に設定されたフラグ情報が“1”でない場合には(S131,“N”)、S133の処理に移行する。S133の処理では、例えば、文字認識支援装置20は、カメラ14a等を帳票から遠ざけるよう移動させ、画像領域内の帳票の撮像画像のサイズが縮小しガイド枠に合致するよう、移動方向を示す矢印等の表示部品をLCD15a等の表示画面に出力する。
(歪み表示処理)
図8Eに例示のフローチャートを参照し、図8Aに例示のS108の歪み補正を行うための歪み表示処理の詳細を説明する。図8Eに例示の歪み表示処理では、文字認識支援装置20は、例えば、処理中の帳票の撮像画像に重畳させて、適正な撮影位置を示すガイド枠を表示する。そして、文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像がガイド枠に合致するよう、撮像画像の歪みを補正する移動方向を示す矢印等の表示部品を処理中の帳票の撮像画像に重畳させて表示する。移動方向を示す矢印等の表示部品は、例えば、撮像画像の左右方向の歪み、上下方向の歪みを解消する移動方向に対応する。
文字認識支援装置20では、処理中の帳票の撮像画像に重畳させて表示された、適正な撮影位置を示すガイド枠、撮像画像の歪みを補正する移動方向を示す矢印等の表示部品により、歪み補正に係る位置決め支援が行われる。なお、歪み補正に係る位置決め支援については、図6Gで説明した。
図8Eに例示のフローチャートにおいて、文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が、“1”であることを判定する(S141)。文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が“1”である場合には(S141,“Y”)、S142の処理に移行する。
S142の処理では、例えば、文字認識支援装置20は、“文字列1”、“文字列2”の部分画像を含む撮像画像の上側の縁辺を縮小するようカメラ14a等を奥行き後ろ方向に移動させる、矢印等の表示部品を表示する。文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像の移動方向を示す矢印等の表示部品を、画像領域内の帳票の撮像画像がガイド枠に合致するよう処理中の帳票の撮像画像に重畳させ、LCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が“1”でない場合には(S141,“N”)、S143の処理に移行し、“歪みフラグ”に設定されたフラグ情報が、“2”であることを判定する。文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が“2”である場合には(S143,“Y”)、S144の処理に移行する。
S144の処理では、例えば、文字認識支援装置20は、“文字列1”、“文字列2”の部分画像を含む撮像画像の上側の縁辺を拡大するようカメラ14a等を手前方向に移動させる、矢印等の表示部品を表示する。文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像の移動方向を示す矢印等の表示部品を、画像領域内の帳票の撮像画像がガイド枠に合致するよう処理中の帳票の撮像画像に重畳させ、LCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が“2”でない場合には(S143,“N”)、S145の処理に移行し、“歪みフラグ”に設定されたフラグ情報が、“3”であることを判定する。文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が“3”である場合には(S145,“Y”)、S146の処理に移行する。
S146の処理では、例えば、文字認識支援装置20は、“文字列1”、“文字列3”の部分画像を含む撮像画像の左側の縁辺を縮小するようカメラ14a等を奥行き後ろ方向に移動させる、矢印等の表示部品を表示する。文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像の移動方向を示す矢印等の表示部品を、画像領域内の帳票の撮像画像がガイド枠に合致するよう処理中の帳票の撮像画像に重畳させ、LCD15a等の表示画面に出力する。
一方、文字認識支援装置20は、例えば、“歪みフラグ”に設定されたフラグ情報が“3”でない場合には(S145,“N”)、S147の処理に移行する。S147の処理では、例えば、文字認識支援装置20は、“文字列1”、“文字列3”の部分画像を含む撮像画像の左側の縁辺を拡大するようカメラ14a等を手前方向に移動させる、矢印等の表示部品を表示する。文字認識支援装置20は、例えば、画像領域内の帳票の撮像画像の移動方向を示す矢印等の表示部品を、画像領域内の帳票の撮像画像がガイド枠に合致するよう処理中の帳票の撮像画像に重畳させ、LCD15a等の表示画面に出力する。
以上、説明したように、本実施形態の文字認識支援装置20は、2隅以上の評価用領域内で認識された“文字列”、及び、該評価用領域に対応する“評価文字列”の位置関係に基づいて、撮影中の帳票の撮像画像に対する位置決め支援を行うことができる。文字認識支援装置20の位置決め支援では、例えば、撮影中の帳票の撮像画像に重畳させて、画像領域内での適正な撮影位置を示すガイド枠が表示される。また、文字認識支援装置20の位置決め支援では、画像領域内での、撮影中の帳票の撮像画像の移動方向を示す矢印等の指示部品(表示部品)がガイド枠と共に表示される。文字認識支援装置20は、利用者に対し、適正な撮影位置を示すガイド枠、及び、画像領域内での、撮影中の帳票の撮像画像の移動方向を示す矢印等の指示部品を撮影中の帳票の撮像画像に重畳させて表示することができる。この結果、本実施形態の文字認識支援装置20では、撮影中の帳票の姿勢を示す複数の軸のうち、少なくとも1軸について文字認識できるか否かを、利用者が識別可能な様態で表示することができる。本実施形態の文字認識支援装置20では、例えば、撮像画像の確定前に文字を正しく認識できる撮像画像の取得についての位置決め支援が実現できる。
本実施形態の文字認識支援装置20は、2隅以上の評価用領域内で認識された“文字列”の重心と、該評価用領域に対応する“評価文字列”の重心との位置関係が、数式(4)−(7)、(6a)−(7a)の関係を満たすことを判定できる。このため、文字認識支援装置20は、判定結果に基づいて、撮影中の帳票の撮像画像について、画像領域内の上下左右方向の並進移動を判定することができる。例えば、上下方向をY軸方向、左右方向をX軸方向とした場合、画像領域内の帳票の撮像画像の並進移動は、帳票の姿勢を示す2
軸(X,Y)についての移動方向に相当する。
また、本実施形態の文字認識支援装置20は、2隅以上の評価用領域内で認識された“文字列”の全体的な重心位置と“文字列”毎の重心位置との角度を算出することができる。同様に、文字認識支援装置20は、文字認識された2隅以上の評価用領域に対応する“評価文字列”の全体的な重心位置と“評価文字列”毎の重心位置との角度を算出することができる。文字認識支援装置20は、“文字列”毎に算出された角度群と“評価文字列”毎に算出された角度群との関係が、数式(10)、(10a)の関係を満たすことを判定できる。このため、文字認識支援装置20は、判定結果に基づいて、撮影中の帳票の撮像画像の、画像領域内での時計回り、反時計回りの回転移動を判定することができる。例えば、上下方向をY軸方向、左右方向をX軸方向、奥行き方向をZ軸方向とした場合、画像領域内の帳票の撮像画像の回転移動は、Z軸方向を中心としたXY平面での移動方向に相当する。
また、本実施形態の文字認識支援装置20は、2隅以上の評価用領域内で認識された“文字列”の全体的な重心位置と“文字列”毎の重心位置との距離を算出することができる。同様に、文字認識支援装置20は、文字認識された2隅以上の評価用領域に対応する“評価文字列”の全体的な重心位置と“評価文字列”毎の重心位置との距離を算出することができる。文字認識支援装置20は、“文字列”毎に算出された距離群と“評価文字列”毎に算出された距離群との関係が、数式(11)、(11a)の関係を満たすことを判定できる。このため、文字認識支援装置20は、判定結果に基づいて、撮影中の帳票の撮像画像について、画像領域内における画像サイズを拡大する移動方向、縮小する移動方向を判定することができる。例えば、上下方向をY軸方向、左右方向をX軸方向、奥行き方向をZ軸方向とした場合、画像領域内の帳票の画像サイズを拡大・縮小する奥行き方向の前後移動は、Z軸についての移動方向に相当する。
また、本実施形態の文字認識支援装置20は、3隅以上の評価用領域内で認識された“文字列”毎の重心位置から、“文字列1”と“文字列2”の距離“C´12”、“文字列1”と“文字列3”の距離“C´13”を算出することができる。なお、“文字列1”と“文字列2”とは、例えば、撮像画像の上側縁辺の2隅であり、“文字列1”と“文字列3”とは、撮像画像の左側縁辺の2隅である。
同様にして、文字認識支援装置20は、文字認識された3隅以上の評価用領域に対応する“評価文字列1”毎の重心位置から、“評価文字列1”と“評価文字列2”の距離“C12”、及び、“評価文字列1”と“評価文字列3”の距離の距離“C13”を算出することができる。
そして、文字認識支援装置20は、距離“C´12”と距離“C12”との距離比(C´12/C12)、及び、距離“C´13”と距離“C13”との距離比(C´13/C13)を求めることができる。文字認識支援装置20は、距離比(C´12/C12)と距離比(C´13/C13)との関係が、数式(12)、(13)の関係を満たすことを判定できる。このため、文字認識支援装置20は、判定結果に基づいて、画像領域内の、撮影中の帳票の撮像画像について、左端側の縁辺のサイズが縮小する補正方向、拡大する補正方向を判定することができる。また、文字認識支援装置20は、判定結果に基づいて、画像領域内の、撮影中の帳票の撮像画像について、上端側の縁辺のサイズが縮小する補正方向、拡大する補正方向を判定することができる。
例えば、上下方向をY軸方向、左右方向をX軸方向、奥行き方向をZ軸方向とした場合、画像領域内の帳票の撮像画像の左端側の縁辺のサイズを拡大・縮小する補正移動は、Y軸方向を中心としたZX面内での回転移動に相当する。同様にして、画像領域内の帳票の
撮像画像の上端側の縁辺のサイズを拡大・縮小する補正移動は、X軸方向を中心としたYZ面内での回転移動に相当する。
《コンピュータが読み取り可能な記録媒体》
コンピュータその他の機械、装置(以下、コンピュータ等)に上記いずれかの機能を実現させるプログラムをコンピュータ等が読み取り可能な記録媒体に記録することができる。そして、コンピュータ等に、この記録媒体のプログラムを読み込ませて実行させることにより、その機能を提供させることができる。
ここで、コンピュータ等が読み取り可能な記録媒体とは、データやプログラム等の情報を電気的、磁気的、光学的、機械的、または化学的作用によって蓄積し、コンピュータ等から読み取ることができる記録媒体をいう。このような記録媒体のうちコンピュータ等から取り外し可能なものとしては、例えばフレキシブルディスク、光磁気ディスク、CD−ROM、CD−R/W、DVD、ブルーレイディスク、DAT、8mmテープ、フラッシュメモリなどのメモリカード等がある。また、コンピュータ等に固定された記録媒体としてハードディスクやROM等がある。
《その他》
以上の実施形態は、さらに以下の付記と呼ぶ態様を含む。以下の各付記に含まれる構成要素は、他の付記に含まれる構成と組み合わせることができる。
(付記1)
文字認識の対象となる矩形の認識対象体を含む撮像画像を受け付ける手段と、
記憶部に登録された前記認識対象体中の複数の評価文字列の座標情報に基づいて、前記認識対象体を含む撮像画像内での3隅以上の所定領域を特定する手段と、
前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定する手段と、
前記関係から前記矩形の認識対象体の姿勢を示す複数の軸のうち、少なくとも1軸について文字認識できるか否かを、利用者が識別可能な様態で表示する表示制御手段と、
を備える文字認識支援装置。
(付記2)
前記評価文字列の座標情報と、前記評価文字列に対応する前記所定領域内で文字認識された文字列との位置関係に基づいて、前記認識対象体の撮像画像の適正な撮影位置に対する補正移動の要否を判定する補正移動判定手段、を備え、
前記表示制御手段は、前記補正移動判定手段で判定された補正移動の要否に基づいて、前記認識対象体の撮像画像に重畳させて、前記認識対象体に対する撮影姿勢の補正方向を表示する、付記1に記載の文字認識支援装置。
(付記3)
前記補正移動判定手段は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心との位置関係に基づいて、前記認識対象体の撮像画像に対する、上下左右の何れか一の方向についての並進移動の要否を判定する、付記2に記載の文字認識支援装置。
(付記4)
前記補正移動判定手段は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心から該文字認識された文字列毎の重心方向への角度と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心から該評価文字列毎の重心方向への角度との相対関係に基づいて、前記認識対象体の撮像画像に対する、時計回りまたは反時計回りの回転移動の要否を判定する、付記2または3に記載の文字認識支援装置。
(付記5)
前記補正移動判定手段は、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と該文字認識された文字列毎の重心との距離、及び、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心と該評価文字列毎の重心との距離の相対関係に基づいて、前記認識対象体の撮像画像の画像サイズの拡大方向または縮小方向についての移動の要否を判定する、付記2から4の何れか一の付記に記載の文字認識支援装置。
(付記6)
前記補正移動判定手段は、3隅以上の所定領域内の部分画像から文字認識された第1文字列と第2文字列との間の第1文字列間距離と、前記所定領域に対応する第1評価文字列と第2評価文字列との間の第1評価文字列間距離との第1距離比、及び、第1文字列と第3文字列との間の第2文字列間距離と、前記所定領域に対応する第1評価文字列と第3評価文字列との間の第2評価文字列間距離との第2距離比の相対関係に基づいて、前記画像領域内での、前記認識対象体の撮像画像の上下左右の何れか一の方向についての歪みを補正する移動の要否を判定する、付記2から5の何れか一の付記に記載の文字認識支援装置。
(付記7)
コンピュータに、
文字認識の対象となる矩形の認識対象体を含む撮像画像を受け付けるステップと、
記憶部に登録された前記認識対象体中の複数の評価文字列の座標情報に基づいて、前記認識対象体を含む撮像画像内での3隅以上の所定領域を特定するステップと、
前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定するステップと、
前記関係から前記矩形の認識対象体の姿勢を示す複数の軸のうち、少なくとも1軸について文字認識できるか否かを、利用者が識別可能な様態で表示する表示制御ステップと、
を実行させるための文字認識支援プログラム。
(付記8)
前記評価文字列の座標情報と、前記評価文字列に対応する前記所定領域内で文字認識された文字列との位置関係に基づいて、前記認識対象体の撮像画像の適正な撮影位置に対する複数の軸方向の補正移動の要否を判定する補正移動判定ステップ、を備え、
前記表示制御ステップは、前記補正移動判定ステップで判定された複数の軸方向の補正移動の要否に基づいて、前記認識対象体の撮像画像に重畳させて、前記認識対象体に対する撮影姿勢の補正方向を表示する、付記7に記載の文字認識支援プログラム。
(付記9)
前記補正移動判定ステップは、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心との位置関係に基づいて、前記認識対象体の撮像画像に対する、上下左右の何れか一の方向についての並進移動の要否を判定する、付記8に記載の文字認識支援プログラム。
(付記10)
前記補正移動判定ステップは、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心から該文字認識された文字列毎の重心方向への角度と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心から該評価文字列毎の重心方向への角度との相対関係に基づいて、前記認識対象体の撮像画像に対する、時計回りまたは反時計回りの回転移動の要否を判定する、付記8または9に記載の文字認識支援プログラム。
(付記11)
前記補正移動判定ステップは、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と該文字認識された文字列毎の重心との距離、及び、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心と該評価文字列毎の重心との距離の相対関係に基づいて、前記認識対象体の撮像画像の画像サイズの拡大方
向または縮小方向についての移動の要否を判定する、付記8から10の何れか一の付記に記載の文字認識支援プログラム。
(付記12)
前記補正移動判定ステップは、3隅以上の所定領域内の部分画像から文字認識された第1文字列と第2文字列との間の第1文字列間距離と、前記所定領域に対応する第1評価文字列と第2評価文字列との間の第1評価文字列間距離との第1距離比、及び、第1文字列と第3文字列との間の第2文字列間距離と、前記所定領域に対応する第1評価文字列と第3評価文字列との間の第2評価文字列間距離との第2距離比の相対関係に基づいて、前記画像領域内での、前記認識対象体の撮像画像の上下左右の何れか一の方向についての歪みを補正する移動の要否を判定する、付記8から11の何れか一の付記に記載の文字認識支援プログラム。
(付記13)
コンピュータが、
文字認識の対象となる矩形の認識対象体を含む撮像画像を受け付けるステップと、
記憶部に登録された前記認識対象体中の複数の評価文字列の座標情報に基づいて、前記認識対象体の撮像画像内での3隅以上の所定領域を特定するステップと、
前記所定領域内の部分画像について文字認識を行い、前記所定領域内で文字認識された文字列と前記認識対象体中の前記評価文字列との関係を判定するステップと、
前記関係から前記矩形の認識対象体の姿勢を示す複数の軸のうち、少なくとも1軸について文字認識できるか否かを、利用者が識別可能な様態で表示する表示制御ステップと、
を実行する文字認識支援方法。
(付記14)
前記評価文字列の座標情報と、前記評価文字列に対応する前記所定領域内で文字認識された文字列との位置関係に基づいて、前記認識対象体の撮像画像の適正な撮影位置に対する複数の軸方向の補正移動の要否を判定する補正移動判定ステップ、を備え、
前記表示制御ステップは、前記補正移動判定ステップで判定された複数の軸方向の補正移動の要否に基づいて、前記認識対象体の撮像画像に重畳させて、前記認識対象体に対する撮影姿勢の補正方向を表示する、付記13に記載の文字認識支援方法。
(付記15)
前記補正移動判定ステップは、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心との位置関係に基づいて、前記認識対象体の撮像画像に対する、上下左右の何れか一の方向についての並進移動の要否を判定する、付記14に記載の文字認識支援方法。
(付記16)
前記補正移動判定ステップは、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心から該文字認識された文字列毎の重心方向への角度と、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心から該評価文字列毎の重心方向への角度との相対関係に基づいて、前記認識対象体の撮像画像に対する、時計回りまたは反時計回りの回転移動の要否を判定する、付記14または15に記載の文字認識支援方法。
(付記17)
前記補正移動判定ステップは、2隅以上の所定領域内の部分画像から文字認識された2以上の文字列を含む組合せ領域の重心と該文字認識された文字列毎の重心との距離、及び、前記所定領域に対応する2以上の評価文字列を含む組合せ領域の重心と該評価文字列毎の重心との距離の相対関係に基づいて、前記認識対象体の撮像画像の画像サイズの拡大方向または縮小方向についての移動の要否を判定する、付記14から16の何れか一の付記に記載の文字認識支援方法。
(付記18)
前記補正移動判定ステップは、3隅以上の所定領域内の部分画像から文字認識された第
1文字列と第2文字列との間の第1文字列間距離と、前記所定領域に対応する第1評価文字列と第2評価文字列との間の第1評価文字列間距離との第1距離比、及び、第1文字列と第3文字列との間の第2文字列間距離と、前記所定領域に対応する第1評価文字列と第3評価文字列との間の第2評価文字列間距離との第2距離比の相対関係に基づいて、前記画像領域内での、前記認識対象体の撮像画像の上下左右の何れか一の方向についての歪みを補正する移動の要否を判定する、付記14から17の何れか一の付記に記載の文字認識支援方法。