以下、図面を参照しながら本発明の実施形態について説明する。まず図1および図19を参照しながら、本発明が適用される穴掘建柱車1の構成について説明する。
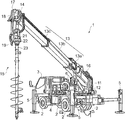
図1には穴掘建柱車1を左斜め後方から見た状態を示しており、この図1から分かるように、穴掘建柱車1は、前後左右にタイヤ車輪2を有して走行可能であり、前部に運転キャブ3を有したトラック車両をベースに構成される。このトラック車両の車体4上に、油圧式の旋回モータSMにより駆動されて上下軸周りに水平旋回可能に構成された旋回台11が配設される。この旋回台11に基端部が枢結されてブーム13が取り付けられており、このブーム13は、旋回台11とブーム13とに跨って設けられた油圧式の起伏シリンダ12により起伏動されるようになっている。ブーム13は、基端ブーム13a、中間ブーム13bおよび先端ブーム13cを入れ子式に組み合わせて、油圧式の伸縮シリンダSSにより伸縮動自在に構成される。
ブーム13には、オーガサポート14が長手方向にスライド移動自在に取り付けられており、このオーガサポート14の下側に、油圧式のオーガモータ21と、ハウジング内に図示しない減速歯車機構を内蔵し、オーガモータ21の回転駆動力を減速して出力する出力軸を備えた減速機22とが揺動自在に取り付けられている。減速機22の下方に本掘用アースオーガ装置15が設けられており、この本掘用アースオーガ装置15はジョイント部材23により減速機22の出力軸と連結されている。オーガサポート14は、先端ブーム13c先端部と基端ブーム13a先端部とに選択的に連結可能に構成されている。図1に示すように、オーガサポート14を先端ブーム13c先端部に連結して、本掘用アースオーガ装置15による掘削作業が行われ、一方、オーガサポート14を基端ブーム13a先端部に連結してアースオーガ装置15が格納される。また、基端ブーム13aの基端側上部には、ブーム13の軸方向に沿って配設されたワイヤ17の繰出・巻取を行うウインチ16が設けられている。このウインチ16は、油圧式のウインチモータUMにより駆動される。
先端ブーム13cの先端部にはブームヘッド18が取り付けられており、このブームヘッド18の内部には図示しないシーブが回転自在に取り付けられている。ウインチ16から繰り出されたワイヤ17は、ブームヘッド18内のシーブを介して下方へ垂れ下がるようになっている。ブームヘッド18から下方へ垂れ下がったワイヤ17は、フック19の動滑車に巻掛けられ、その先端がブームヘッド18内に固定されている。このため、ウインチ16によりワイヤ17の繰出・巻取を行って、フック19を引き上げたり引き下げたりできるようになっている。
図1に示すように、車体4の前後左右四カ所に下方に伸縮自在なアウトリガ5が設けられており、建柱穴の掘削作業や電柱の建柱作業を行うときには、アウトリガ5を下方に張り出して車体4を持ち上げ支持できるようになっている。また、車体4上には第1操作装置6が設けられており、この第1操作装置6を操作することで、旋回台12の旋回動、ブーム13の起伏動および伸縮動、本掘用アースオーガ装置15の回転動、並びにウインチ16の回転動を行わせることができるようになっている。
図2には本掘用アースオーガ装置15を分解した状態を示しており、この図2から分かるように、本掘用アースオーガ装置15は、軸方向に複数のセット穴25が並んで形成された角柱シャフト24と、角柱シャフト24が挿入される本掘用アースオーガ26とから構成される。
本掘用アースオーガ26は、オーガ本体部27と、オーガ本体部27の下端部に取り付けられた本掘用上側掘削刃部32、本掘用上側掘削刃部32の下端部に取り付けられた本掘用中間掘削刃部33、および本掘用中間掘削刃部33の下端部に取り付けられた本掘用下側掘削刃部34とから構成される。オーガ本体部27は、角柱シャフト24と嵌合する挿入空間30を有する軸部28と、軸部28の周囲に螺旋状に取り付けられて掘削方向に回転して掘削土砂を上方へ搬送するオーガスクリュー29と、軸部28の上部に取り付けられたセットピンハンドル31とを備えて構成される。本掘用上側掘削刃部32、本掘用中間掘削刃部33および本掘用下側掘削刃部34は、断面視鋭角の掘削刃(図示せず)を備え、効率良く地面を掘削できるように構成されている。
ここで、本掘用アースオーガ装置15の組立構成について説明する。角柱シャフト24をオーガ本体部27の挿入空間30に嵌合させて挿入し、セットピンハンドル31を操作して複数のセット穴25のいずれかにセットピンハンドル31の先端部を嵌合させて、角柱シャフト24がオーガ本体部27に取り付けられる。この角柱シャフト24の上部が、ジョイント部材23を介して減速機22の出力軸に連結される。角柱シャフト24が挿入空間30に嵌合しているため、オーガモータ21を回転駆動させると、角柱シャフト24と本掘用アースオーガ26とを一体的に回転させることができる。
図3に示すように、この本掘用アースオーガ装置15は、本掘用中間掘削刃部33および本掘用下側掘削刃部34を外して試掘用アースオーガ装置40を取り付けることができるようになっている。図4に試掘用アースオーガ装置40を分解した状態を示し、また図5に試掘用アースオーガ装置40の断面図を示しており、これらの図から分かるように、試掘用アースオーガ装置40は、上部に格納用穴42aが形成されるとともに下部に抜け止めピン42bが取り付けられた試掘用角柱シャフト41と、試掘用角柱シャフト41が挿入される試掘用アースオーガ43と、円筒状に形成されて試掘用アースオーガ43を覆うように取り付けられた筒状部材50と、筒状部材50に着脱自在に取り付けられた振動装置60と、筒状部材50に着脱自在に取り付けられた操作ハンドル70とから構成される。
試掘用アースオーガ43は、オーガ本体部44と、オーガ本体部44の下端部に取り付けられた試掘用上側掘削刃部80、試掘用上側掘削刃部80の下端部に取り付けられた試掘用下側掘削刃部90とから構成される。オーガ本体部44は、試掘用角柱シャフト41と嵌合する挿入空間47を有する軸部45と、軸部45に軸方向に間隔をおいて形成された一対のフランジ部46と、軸部45の上部に取り付けられた格納用ロックピン48と、軸部45の周囲に螺旋状に取り付けられて掘削方向に回転して掘削土砂を上方へ搬送するオーガスクリュー49とを備えて構成される。
試掘用上側掘削刃部80は、図4に示すように、オーガ本体部44の下端部に取り付けられる軸部81と、軸部81から径方向に傾斜して延びる板状の基部82と、基部82の下端部に階段状に形成された階段状掘削刃83とから構成される。階段状掘削刃83の端部84は、試掘時に埋設物を損傷させないようにR状に形成されている。
図6(a)に試掘用下側掘削刃部90の断面を示し、図6(b)には試掘用下側掘削刃部90を側方から見た状態を示しており、これらの図から分かるように、試掘用下側掘削刃部90は、刃本体部91の周囲に断面視円弧状となった2つの円弧掘削刃92が、軸方向に向けて螺旋状に延びて形成される。また、試掘用下側掘削刃部90の下端部は、一方の円弧掘削刃92が紙面手前側から奥側に向けて折れ曲がるとともに、他方の円弧掘削刃92が紙面奥側から手前側に向けて折れ曲がり、試掘時に埋設物を損傷させないように構成される。
筒状部材50は、図5に示すように、筒状に形成された筒本体部51と、筒本体部51の上下両端部に径方向に突出して形成されたフランジ部52と、フランジ部52の内部に取り付けられた軸受け部材53と、筒本体部51の側面に軸方向に並んで設けられた複数のハンドル取付部54とから構成される。
振動装置60は、詳細な図示は省略するが、電動式または油圧式のモータと、このモータにより回転駆動される一対の偏芯ウエイトとから構成され、モータにより偏芯ウエイトを回転駆動させることで、上下方向の振動を発生させることができるように構成される。
操作ハンドル70は、図5に示すように、クランク状に折れ曲がったハンドル部71と、ハンドル部71の先端に取り付けられた平板状の係合部72とから構成される。この操作ハンドル70は、ハンドル取付部54と筒本体部51との間の隙間55に係合部72を上方から挿入することで、筒状部材50に着脱自在に取り付けることができるようになっている。
ここで、試掘用アースオーガ装置40の組立構成について説明する。まず、図4に示すように、試掘用角柱シャフト41の上端が、本掘用上側掘削刃部32に取り付けられる。格納用ロックピン48を手前に引き出した状態で、試掘用角柱シャフト41をオーガ本体部44の挿入空間47に上下にスライド移動自在に嵌合挿入する。よって、試掘用角柱シャフト41に対してオーガ本体部44(筒状部材50)が軸方向にスライド移動自在な状態で、オーガ本体部27、本掘用上側掘削刃部32および試掘用アースオーガ43が一体的に回転される。一方、筒状部材50は、回転駆動されるオーガ本体部44(軸部45)に対し、一対のフランジ部46間に軸受け部材53を介して回転自在に取り付けられる。なお、試掘用角柱シャフト41に設けられた抜け止めピン42bが、挿入空間47の上部に設けられた係合部(図示せず)に係合可能に構成されており、抜け止めピン42bと係合部との係合により試掘用角柱シャフト41から試掘用アースオーガ43が脱落しないようになっている。また、試掘用角柱シャフト41に設けられた格納用穴42aに、格納用ロックピン48の先端部を挿入することで、試掘用アースオーガ43を格納位置に保持することができる。
以上、穴掘建柱車1の構成について説明した。以下においては、この穴掘建柱車1の作動について、まず、本掘用アースオーガ装置15の下端に試掘用アースオーガ装置40を取り付けて試掘作業を行い、次に、本掘用アースオーガ装置15から試掘用アースオーガ装置40を外して本掘作業を行って、建柱穴Hを掘削する場合を例示して説明する。
試掘作業に先立って、まず、オーガサポート14を先端ブーム13c先端部に連結させて、本掘用アースオーガ装置15を直立状態となるように揺動させる。この状態で、本掘用アースオーガ装置15から本掘用中間掘削刃部33および本掘用下側掘削刃部34を外して、試掘用アースオーガ装置40に付け替える(図7参照)。そして、試掘用下側掘削刃部90が試掘用アースオーガ43、筒状部材50および振動装置60等の自重により地面に接触するようにブーム13を起伏等させた後、ブーム13の作動を停止させた状態でオーガモータ21を回転駆動させて試掘作業を行う。これにより、角柱シャフト24、オーガ本体部27、本掘用上側掘削刃部32、試掘用角柱シャフト41および試掘用アースオーガ43が一体的に回転駆動されて、試掘用上側掘削刃部80および試掘用下側掘削刃部90により地面が掘削されるとともに、掘削土砂がオーガスクリュー49により上方へ搬送される。
このとき、図7に示すように、作業者Mが操作ハンドル70を握って下方に押圧すれば、筒状部材50の回転を規制した状態で筒状部材50に下方への押圧力を作用させることができる。この筒状部材50に作用する力が、筒状部材50のフランジ部52を介してオーガ本体部44のフランジ部46に伝達され、試掘用アースオーガ43に下方への押圧力を作用させることができる。これにより、試掘用角柱シャフト41に対して、試掘用アースオーガ43、筒状部材50、振動装置60および操作ハンドル70を一体的に下方に押し出して地面を掘削することができる。
このように、本発明に係る試掘用アースオーガ装置40は、オーガモータ21の回転駆動力を利用して試掘作業を行うようになっているので、作業者Mの作業負担を低減しつつ作業効率を向上させることができる。また、試掘用アースオーガ43を地面に押し付ける力を、作業者Mが操作ハンドル70を操作して調整することができるので、埋設物に接触した感触があったときに操作ハンドル70を下方に押圧する力を弱めれば、埋設物の損傷を防止できる。また、試掘用下側掘削刃部90の稜線部および下端部に円弧掘削刃92が形成されているため、試掘用アースオーガ43等の自重に作業者Mの押圧力を加えた力で試掘するときに、試掘用下側掘削刃部90が埋設物に接触しても埋設物の損傷を防止することができる。
また、図8(a)に示すように、試掘用上側掘削刃部80を構成する階段状掘削刃83の端部84がR状に形成されているため、試掘時に試掘用上側掘削刃部80が埋設物Pに接触しても、埋設物Pの損傷を防止することができる。また、図8(b)に示すように、階段状掘削刃83が階段状に形成されているため、例えば階段状ではなく直線状に掘削刃が形成された場合と比較して、埋設物Pに接触したときに試掘用アースオーガ43および筒状部材50が上下に振動されるので、作業者Mは埋設物Pの存在を感触として検知できる。さらに、階段状掘削刃83が階段状に形成されているため、地面を効率良く掘削できて試掘作業の作業効率を向上させることができる。
図7に示す状態Aから状態Bへと建柱穴Hの試掘作業が進むに従って、操作ハンドル70を上方のハンドル取付部54に付け替えることで、作業しやすい姿勢のままで1.5m程度建柱穴Hを試掘することができる。また、振動装置60を駆動させながら試掘作業を行うと、振動装置60の振動により効率良く掘削できる。
以上のようにして試掘作業を行い、この掘削場所に埋設物がないと判断された場合には、ブーム13を起伏等させて試掘用アースオーガ装置40を地中から取り出し、本掘用アースオーガ装置15から試掘用アースオーガ装置40を外して本掘用中間掘削刃部33および本掘用下側掘削刃部34に付け替える。そして、オーガモータ21を回転させながらブーム13を倒伏および縮小作動させて、本掘用アースオーガ装置15を上述の試掘作業により掘削された建柱穴Hに建て入れて本掘作業を行い、所望の深さの建柱穴Hを掘削する。
上述の実施形態では、本掘用アースオーガ装置15の下端に試掘用アースオーガ装置40を取り付けて試掘を行う構成について説明したが、この構成以外にも、例えば図9に示す構成が可能である。すなわち、試掘用アースオーガ装置40の試掘用角柱シャフト41を、ジョイント部材23を介して減速機22の出力軸に直接連結する構成が可能である(試掘用アースオーガ装置40の断面は図5参照)。この構成においても、試掘用アースオーガ43を地面に押し付ける力を、作業者Mが操作ハンドル70を操作して調整しながら試掘を行うことができる。
上述の実施形態では、試掘用上側掘削刃部80および試掘用下側掘削刃部90を取り付けて構成される試掘用アースオーガ43を例示して説明したが、試掘用アースオーガはこの構成に限定されない。例えば図10に示すように、試掘用上側掘削刃部80の代わりに試掘用上側掘削刃部150を用い、また、試掘用下側掘削刃部90の代わりに試掘用下側掘削刃部180を用いた構成でも良い。
試掘用上側掘削刃部150は、オーガ本体部44の下端に取り付けられる軸部151と、軸部151から径方向に延びる連結部152と、連結部152の端部に凹凸状に形成された掘削刃153と、連結部152の径方向端部に繋がってリング状に形成された本体部154と、本体部154の下端から下方に円弧状に突出する複数の突出掘削刃155とから構成される。試掘用下側掘削刃部180は、下端軸部材160と、下端軸部材160の下端周囲を覆うように取り付けられた収容筒部材170とから構成される。図11(a)に試掘用下側掘削刃部180の断面を示し、図11(b)に下端軸部材160を側方から見た状態を示しており、これらの図から分かるように、下端軸部材160は、刃本体部161の周囲に断面視鋭角となった2つの鋭角掘削刃162が、軸方向に向けて螺旋状に延びて形成される。収容筒部材170は、図10に示すように円筒状に形成され、筒本体部171の下端部に波状のなめらかな凹凸部172を備える。
このため、試掘時に、埋設物に収容筒部材170が接触しても、筒本体部171の下端部に備えた波状の凹凸部172により埋設物の損傷を防止することができる。凹凸部172が埋設物に接触すると、回転により試掘アースオーガ43全体が上下に移動されるので、作業者は操作ハンドル70を介して埋設物に接触したことに気づくことができる。また、埋設物に試掘用上側掘削刃部150を構成する本体部154の下端部が接触しても、本体部154および円弧状に突出した突出掘削刃155により埋設物の損傷を防止することができる。突出掘削刃155が埋設物に接触すると、回転により試掘アースオーガ43全体が上下に移動されるので、作業者は操作ハンドル70を介して埋設物に接触したことに気づくことができる。
図12には、試掘時にオーガ本体部44の下端に取り付ける試掘用上側掘削刃部、収容筒部材、および試掘用下側掘削刃部/下端軸部材の組み合わせパターンを示している。ここに示すパターン1は、上述の実施例1および2で示した組み合わせに相当し、パターン2は、図10に示した組み合わせに相当する。図11に示すように、下端軸部材160の鋭角掘削刃162は埋設物を損傷させやすく、また刃自身も損傷しやすいので、鋭角掘削刃162による埋設物の損傷防止および鋭角掘削刃162自身の保護のために、下端軸部材160は収容筒部材170と組み合わせて用いることが好ましい(パターン3)。また、下端軸部材160に対して試掘用下側掘削刃部90は、埋設物に接触しても埋設物の損傷を防止できる形状を有しているので、収容筒部材170と組み合わせることなく単独で用いることが可能で(パターン5)、一方で、収容筒部材170と組み合わせて用いても良い(パターン4および6)。
図13には試掘用アースオーガ装置の変形例を示しており、この図13を参照しながら変形例に係る試掘用アースオーガ装置240について以下に説明する。なお、試掘用アースオーガ装置40と同一部材には同一番号を付して、ここでの説明は省略する。
図13に示す試掘用アースオーガ装置240は、試掘用角柱シャフト41と、試掘用アースオーガ243と、軸受け支持部材250と、振動装置60と、操作ハンドル270とから構成される。試掘用アースオーガ243はオーガ本体部244を有して構成され、このオーガ本体部244は、オーガ本体部44と比較して、一対のフランジ部46の上下間隔を狭めるとともに、その分だけ上下に長く形成されたオーガスクリュー49を備える。軸受け支持部材250は、ハンドル取付部54に対応する上下寸法を有し、上下端部に軸受け部材53が取り付けられて構成される。操作ハンドル270は、先端側に係合部72が取り付けられるとともに、基端側に挿入部273が形成された先端側部材271と、先端側に挿入部273を挟持する挟持部281が形成されるとともに、基端側に振動を吸収可能な防振ゴムからなる取っ手部283が設けられた基端側部材280とから構成される。
先端側部材271と基端側部材280とは、挿入部273を挟持部281に挟持させた状態で連結ピン290を挿通させることにより連結されている。挟持部281には、連結ピン290が挿通される複数の挿通孔282が上下に並んで形成されている。このため、連結ピン290を抜いて先端側部材271に対して基端側部材280を上下にスライド移動させ、その状態で連結ピン290を挿通孔282に挿通すれば、作業しやすい姿勢のままで試掘作業を行うことができる。また、作業者が握る取っ手部283が防振ゴムにより形成されているので、作業者に不要な振動が伝わることを抑制できる。
図14には試掘用アースオーガ装置のさらに別の変形例を示しており、この図14を参照しながら変形例に係る試掘用アースオーガ装置340について以下に説明する。なお、試掘用アースオーガ装置40,240と同一部材には同一番号を付して、ここでの説明は省略する。
図14に示す試掘用アースオーガ装置340は、断面視略正方形に形成されて上下に延びる角柱シャフト301(図15も参照)と、角柱シャフト301に取り付けられる試掘用アースオーガ343とから構成される。試掘用アースオーガ343は、角柱シャフト301が上下に挿入されるオーガ本体部344と、オーガ本体部344の下端部に取り付けられた試掘用上側掘削刃部80と、試掘用上側掘削刃部80の下端部に取り付けられた試掘用下側掘削刃部90とから構成される。
オーガ本体部344は、上下に延びて形成され角柱シャフト301が嵌合した状態で挿入される挿入空間346(図15参照)を有する軸部345と、軸部345の上部に取り付けられたシャフト支持装置310と、シャフト支持装置310の下方において軸部345に取り付けられたスライドロック装置330と、スライドロック装置330の下方において軸部345に取り付けられた軸受け支持部材250と、軸受け支持部材250に取り付けられた振動装置60および操作部380と、軸受け支持部材250の下方において軸部345に取り付けられたオーガスクリュー49とを備えて構成される。
図15に図14中のXV−XV部分の断面を示しており、この図15から分かるように、シャフト支持装置310は、挿入空間346に連通する支持部材側挿入空間320を内部に有した略リング状に形成され、軸部345の上部に取り付けられたベース部321と、ベース部321の周方向に並んで設けられた4つの回転ローラ装置311とを備えて構成される。
ベース部321は、角柱シャフト301表面に直交する方向(以下、直交方向と称する)に延びる支持部材配設空間322を4つ有して構成される。回転ローラ装置311はそれぞれ、断面視略コの字に形成され支持部材配設空間322内に直交方向にスライド移動自在に配設されたローラ支持部材312と、ローラ支持部材312の内側にローラ支持部材312のスライド方向に直交する方向に延びて取り付けられた支持シャフト313と、支持シャフト313に回転自在に支持されてローラ支持部材312の内側に配設されたローラ314と、外周部にねじが形成されてローラ支持部材312の直交方向外側部分に取り付けられ、直交方向外側に向けて延びるねじ部材315と、ねじ部材315を直交方向に挿通させてローラ支持部材312を外側から覆う蓋部材316と、ローラ支持部材312と蓋部材316との間に挟持されて配設されて軸方向(直交方向)に弾性変形可能な複数の皿ばね317と、蓋部材316の外側においてねじ部材315に螺合されたナット(ダブルナット)318aと、ねじ部材315に挿通されてナット318aと蓋部材316との間に配設された座金318bとを備えて構成される。なお、図16に図15中のXVI−XVI部分の断面を示しており、この図から分かるように、回転ローラ装置311は上下一対のローラ314,314を備えて構成される。
ローラ支持部材312は、ローラ314を支持シャフト313を中心として回転自在に支持した状態で、直交方向外側から支持部材配設空間322内に挿入される。このローラ支持部材312から外側に向けて延びるねじ部材315に、複数の皿ばね317が挿通された後、蓋部材316が外側からベース部321に取り付けられる。そして、セットボルト319により、蓋部材316がベース部321に固定される。この状態で、蓋部材316の外側に突出したねじ部材315に座金318bを挿通させるとともにナット318aを螺合させて、ローラ支持部材312が皿ばね317に弾性的に押し付けられた状態に保持される。このとき、ねじ部材315に対するナット318aの螺合位置を調整することにより、ローラ支持部材312(ローラ314)の直交方向における位置を調整することができる。この試掘用アースオーガ装置340においては、角柱シャフト301が挿入されていない状態で、支持部材側挿入空間320内にローラ314が突出して位置するように、ナット318aの螺合位置が調整されている。
スライドロック装置330は、角柱シャフト301に上下に並んで形成された複数のロック穴に係合して、角柱シャフト301に対する試掘用アースオーガ343の上下へのスライド移動を規制するロックピンと、このロックピンを角柱シャフト301に押圧する圧縮ばねとを備えて構成される。
操作部380は、図14に示すように、軸受け支持部材250に着脱自在に取り付けられた接続部材360と、この接続部材360に着脱自在に取り付けられる操作ハンドル370とを備えて構成される。接続部材360は、棒状に形成され、一端が軸受け支持部材250に着脱自在に取り付けられるとともに、他端に後述する操作ハンドル370のハンドル側取付部373と係合する接続部材側取付部361を備えて構成される。操作ハンドル370は、略L字状に形成され、複数のハンドル側取付部373が上下に並んで設けられたベース部371と、このベース部371の端部に取り付けられたハンドル部372とを備えて構成される。例えば浅い位置まで試掘する場合には、実線で示すようにハンドル部372を下側に位置させ、一方、深い位置まで試掘する場合には、2点鎖線で示すようにハンドル部372を上側に位置させて、ハンドル側取付部373を接続部材側取付部361に係合させれば、ハンドル部372を操作しやすい高さに位置させることができる。
以上、アースオーガ装置340の構成について説明した。次に、試掘を行うときのアースオーガ装置340の作動について、図15に示す構造を模式的に示した図18を参照しながら説明する。アースオーガ装置340は、特にシャフト支持装置310を特徴構成としており、以下においてはこのシャフト支持装置310の作動を中心に説明する。
角柱シャフト301と支持部材側挿入空間320(挿入空間346)との間には、角柱シャフト301に対して試掘用アースオーガ343をスライド移動させるためのクリアランスの範囲が設けられている。このため、オーガモータ21が停止されて角柱シャフト301が回転駆動されていないときには、図18(a)に示すように、支持部材側挿入空間320内に突出したローラ314が角柱シャフト301に弾性的に当接するとともに、角柱シャフト301の一部が支持部材側挿入空間320の内周面に当接する。なお、図15は、上記クリアランスを強調した断面を示している。
試掘時には図18(b)に示すように、角柱シャフト301を矢印Rの向きに回転駆動させるとともに作業者がハンドル部372を操作して、試掘用アースオーガ343を地面に押し付ける力を調整しながら掘削が行われる。このとき、試掘用アースオーガ343には、試掘用アースオーガ343を地面に押し付ける力に応じた掘削抵抗が作用する。この掘削抵抗により、ローラ支持部材312、支持シャフト313、ローラ314、ねじ部材315およびナット318aが一体となって、皿ばね317の弾性力に抗して直交方向外側に向けてスライド移動される。これにより、回転駆動される角柱シャフト301を軸部345およびベース部321の内周面に当接させることなくローラ314に当接させ、このローラ314を介して角柱シャフト301の回転駆動力が試掘用アースオーガ343に伝達される(図17(a)も参照)。よって、ローラ314の回転を利用して、角柱シャフト301に対して試掘用アースオーガ343を簡単に下方に押し出して地面に押し付けることができる。
ところで、試掘時に所定の掘削抵抗を超える掘削抵抗が試掘用アースオーガ343に作用する場合、角柱シャフト301の回転駆動力をローラ314を介して試掘用アースオーガ343に伝達させると、支持シャフト313等に過大な力が作用して支持シャフト313等が破損する虞がある。そこで、所定の掘削抵抗を超える掘削抵抗が作用する場合、図18(c)に示すように、その掘削抵抗に応じてローラ314等がさらに直交方向外側に向けてスライド移動されて、支持シャフト313等の破損を防止するようになっている。この場合の回転ローラ装置311の作動について、回転ローラ装置311を模式的に示した図17を参照しながら説明する。
図17(a)のようにローラ314が弾性的に角柱シャフト301に当接し、ローラ314を介して角柱シャフト301の回転駆動力が伝達される場合において、所定の掘削抵抗を超える掘削抵抗が試掘用アースオーガ343に作用したときの状態を、図17(b)に示している。所定の掘削抵抗を超える掘削抵抗が作用すると、図17(b)に示すように、この掘削抵抗に応じて、ローラ支持部材312、支持シャフト313、ローラ314、ねじ部材315およびナット318aが一体となって、皿ばね317の弾性力に抗して直交方向外側に向けてスライド移動される。これにより、ローラ支持部材312と蓋部材316との対向間隔が狭まるとともに、ナット318aと座金318bとの間に隙間が発生する。
その結果、図18(c)に示すように、ローラ314が支持部材側挿入空間320内から退避し、回転駆動される角柱シャフト301が軸部345およびベース部321の内周面にも当接される。このため、角柱シャフト301の回転駆動力が軸部345およびベース部321を介して試掘用アースオーガ343に伝達されるので、所定の掘削抵抗を超える掘削抵抗が作用してもシャフト支持装置310(支持シャフト313等)が破損することがない。
なお、角柱シャフト301に形成されたロック穴の上下間隔だけ試掘用アースオーガ343が下方に押し出されると、スライドロック装置330のロックピンがロック穴に係合し、試掘用アースオーガ343をそれ以上下方に押し出すことが規制される。このため、例えば約0.5mずつ3回に分けて試掘を行う場合に、ロック穴を約0.5m間隔で形成しておけば、1回分(約0.5m)試掘された時点で自動で試掘用アースオーガ343の押し出しが規制されるので、押し出し量の管理が不要となり試掘作業が簡単になる。なお、試掘用アースオーガ装置340は、本掘に対応した上下長さを有したオーガスクリュー49を備えるので、試掘終了後にそのまま本掘作業を行うことも可能である。
ところで、試掘用アースオーガ装置40,240または340(以下、単に「試掘用アースオーガ装置40」と称す)を用いて試掘作業を行うとき、上述のように試掘用アースオーガ43,243または343(以下、単に「試掘用アースオーガ43」と称す)を地面に押し付ける力を作業者が適切に調整しながら試掘を行えば埋設物の破損を防止できるのであるが、押し付ける力の調整を誤ると埋設物を破損する虞がある。そこで、本発明に係る穴掘建柱車1は、試掘用アースオーガ43の駆動状態を検出し、この検出結果に基づいてオーガモータ21の作動を規制することにより、作業者Mの感覚に頼ることなく埋設物の破損を防止するための作動制御装置を備えている。以下、この作動制御装置の一例としての作動制御装置400,500,600および700について説明する。
以下の説明においては、試掘用アースオーガ装置40を、操作ハンドル70を装着することなく試掘用角柱シャフト41と、試掘用アースオーガ43と、筒状部材50と、振動装置60とから構成し、試掘用アースオーガ43、筒状部材50および振動装置60の自重により、試掘用アースオーガ43を地面に接触させて試掘を行う場合について説明する。また、水道管やガス管等の埋設物は通常、一旦地面を掘り起こして地中に埋設されるものであるため、このようにして埋設物が埋設された場所を試掘するときには、地面(埋設物の上に被せられた土)よりも埋設物の方が硬い場合が多い。以下に説明する作動制御装置は、このような場所を試掘するときに、試掘用アースオーガ43の駆動状態に基づいて埋設物を検出し、オーガモータ21の作動を規制するものである。
まず、作動制御装置400の構成について、図19および図20を参照しながら説明する。作動制御装置400は、第1操作装置6と、モード選択スイッチ7と、警報装置9と、埋設物検出器408と、コントローラ410と、油圧供給ユニット468とから構成される。第1操作装置6は、旋回台11の旋回操作を行うための旋回操作レバーL1と、ブーム13の起伏操作を行うための起伏操作レバーL2と、ブーム13の伸縮操作を行うための伸縮操作レバーL3と、ウインチ16の巻き上げ・巻き下げ操作を行うためのウインチ操作レバーL4と、オーガモータ21の回転操作を行うためのオーガ操作レバーL5とを備えて構成される。
各操作レバーL1〜L5は、中立位置から前後に向けて傾動操作可能に配設されている。例えば、旋回操作レバーL1を前後に傾動操作することで、操作方向および操作量に対応させて旋回モータSMを回転駆動させて、旋回台11を旋回作動させることができる。また、起伏操作レバーL2を前後に傾動操作することで、操作方向および操作量に対応させて起伏シリンダ12を伸縮作動させて、ブーム13を起仰作動させることができる。伸縮操作レバーL3を前後に傾動操作することで、操作方向および操作量に対応させて伸縮シリンダSSを伸縮作動させて、ブーム13を伸縮作動させることができる。ウインチ操作レバーL4を前後に傾動操作することにより、操作方向および操作量に対応させてウインチモータUMを回転駆動させて、ワイヤ17を巻き上げ・巻き下げ作動させることができる。オーガ操作レバーL5を前後に傾動操作することにより、操作方向および操作量に対応させてオーガモータ21を回転駆動させて、試掘用アースオーガ装置40を回転作動させることができる。各操作レバーL1〜L5には、それぞれリミットスイッチからなる操作検出器S1〜S5が設けられており、操作レバーL1〜L5の傾動操作に応じてオン作動し、オン作動に対応した操作信号をコントローラ410に送出する。
モード選択スイッチ7は、本掘作業を行うのに適した本掘モードD、試掘作業を行うのに適した試掘モードSのうち、いずれかのモードを選択操作するためのスイッチである。モード選択スイッチ7は、選択されたモードに対応する操作信号をコントローラ410に送出する。警報装置9は、例えば警告音を発するスピーカや、注意を喚起するランプ等を用いて構成され、コントローラ410から送られる作動信号に基づいて作動する。
コントローラ410は、穴掘建柱車の作動制御に関するプログラム情報を記憶するメモリ10aと、メモリ10aに記憶されたプログラム情報を読み出し、入力された操作信号および検出信号に基づいて、警報装置9や油圧供給ユニット468等に指令信号を出力して制御するCPU10bとを備えて構成される。メモリ10aには、モード選択スイッチ7から本掘モードDに対応する操作信号が入力されるときに読み出される、本掘モードDに関するプログラム情報と、試掘モードSに対応する操作信号が入力されるときに読み出される、試掘モードSに関するプログラム情報とが記憶されている。ここで、本掘モードDに関するプログラム情報は、第1操作装置6への操作に応じてオーガモータ21等の油圧アクチュエータを作動させるプログラム情報であり、一方、試掘モードSに関するプログラム情報は、掘削状態に応じて警報装置9を作動させたりオーガモータ21の作動を規制するプログラム情報である。具体的には、試掘モードSに関するプログラム情報として、埋設物に接触している可能性があることを報知するために警報装置9を作動させる基準となる警報トルク値T1と、埋設物が損傷する前にオーガモータ21の回転駆動を停止させる基準となる規制トルク値T2(>T1)とが記憶されている。なお、ダイヤルスイッチ等により、警報トルク値T1および規制トルク値T2を可変設定できる構成が好ましく、このような構成とすれば、掘削状況に応じた適切な警報トルク値T1および規制トルク値T2を設定できる。
油圧供給ユニット468は、図20に示すように、油圧ポンプP2,P3およびP4から供給された作動油を、オーガモータ21等の油圧アクチュエータに給排制御するユニットであって、旋回制御バルブV1、起伏制御バルブV2、伸縮制御バルブV3、ウインチ制御バルブV4、オーガ制御バルブV5、オーガシャットオフバルブ420、起伏シャットオフバルブ430、優先供給制御部480、および操作レバーL1〜L5の操作に応じて作動される供給油路切換バルブ490を備えて構成される。なお、油圧ポンプP2およびP3は、図19に示すように、PTO操作レバーLEをオン操作して、トランスミッションTMに組み込まれたパワーテイクオフ機構PTOを作動させることによって、エンジンEにより駆動される。油圧ポンプP4は、コントローラ410によって駆動制御される電動モータM1により駆動される。
油圧供給ユニット468は、油圧ポンプP2の吐出口に繋がる第1吐出油路471、油圧ポンプP3の吐出口に繋がる第2吐出油路472、油圧ポンプP4の吐出口に繋がる第3吐出油路473、供給油路切換バルブ490と第1吐出油路471とを繋ぐ供給油路474、第1吐出油路471と起伏制御バルブV2とを繋ぐ供給油路475、起伏制御バルブV2とオーガ制御バルブV5とを繋ぐ余剰油供給油路476、供給油路切換バルブ490と余剰油供給油路476とを繋ぐ供給油路478、および供給油路切換バルブ490と供給油路478とを繋ぐ供給油路479も備える。
供給油路474にはチェックバルブ474aが設けられており、このチェックバルブ474aにより第1吐出油路471から供給油路切換バルブ490への作動油の供給が規制される。供給油路478にはチェックバルブ478aが設けられており、このチェックバルブ478aにより余剰油供給油路476から供給油路切換バルブ490への作動油の供給が規制される。また、油圧ポンプP3および油圧ポンプP4からの作動油が供給される第3吐出油路473には、調圧バルブ473aが設けられており、この調圧バルブ473aにより第3吐出油路473に供給される作動油が所定圧に調圧される。
供給油路切換バルブ490は、第3吐出油路473を供給油路478に接続する第1切換位置491aと、第3吐出油路473を供給油路474に接続する第2切換位置491bと、第3吐出油路473を供給油路479に接続する第3切換位置491cとに切り換え可能となっている。供給油路切換バルブ490の両端部には駆動ソレノイド492a,492bを備えられ、これら駆動ソレノイド492a,492bにコントローラ410からの駆動信号が入力される。電動モータM1を停止させてエンジンEを駆動させる場合、供給油路切換バルブ490は第1切換位置491aに切り換えられ、エンジンEを停止させて電動モータM1を駆動させる場合であっていずれか一つのレバー操作のみが行われる場合、第2切換位置491bに切り換えられ、エンジンEを停止させて電動モータM1を駆動させる場合であって複数のレバー操作が同時に行われる場合、第3切換位置491cに切り換えられる。
優先供給制御部480は、供給油路479に設けられた絞り部480aと、絞り部480aの上流側において供給油路479に接続された流路開閉バルブ480bとから構成される。流路開閉バルブ480bは、供給油路479における絞り部480aの前後圧力が入力されるように構成されており、絞り部480aの前後圧力差が所定値となるように、供給油路479における余剰分の作動油をバイパス油路480を介して供給油路474に供給する制御を行う。
起伏制御バルブV2は、供給油路475を介して供給される作動油を起伏シリンダ12に供給する制御を行う。起伏制御バルブV2は、起伏操作レバーL2が中立位置に位置するときには中立位置483nに切り換えられ、起伏操作レバーL2が中立位置から前後に傾動操作されると操作方向に応じて第1切換位置483a,第2切換位置483bに切り換えられる構成になっている。
オーガ制御バルブV5は、余剰油供給油路476を介して起伏制御バルブV2に接続されるとともに、余剰油供給油路476および供給油路478を介して供給油路切換バルブ490に接続されており、作動油をオーガモータ21に供給する制御を行う。供給油路切換バルブ490および制御バルブV1〜V4の作動に応じた作用油が、余剰油供給油路476および供給油路478を介してオーガ制御バルブV5に供給される。オーガ制御バルブV5は、オーガ操作レバーL5が中立位置に位置するときには中立位置485nに切り換えられ、オーガ操作レバーL5が中立位置から正転方向(オーガを地面に食い込ませる方向)に傾動操作されると第1切換位置485aに切り換えられ,逆転方向に傾動操作されると第2切換位置485bに切り換えられる構成になっている。オーガ制御バルブV5からオーガモータ21に供給されることなく余剰となった作動油は、戻り油路477を介してオイルタンクに戻される。
オーガ制御バルブV5とオーガモータ21とを繋ぐ油路(正転時、すなわち掘削方向に回転する時に供給側となる油路21a、および正転時に排出側となる油路21b)に、オーガシャットオフバルブ420が設けられている。オーガシャットオフバルブ420は、チェックバルブ421を備えるとともに、油路21aと油路21bとを遮断する遮断位置422aと、油路21a,21bを連通させる連通位置422bとに切り換え可能に構成される。オーガシャットオフバルブ420の連通位置422b側の端部に、駆動ソレノイド423が設けられており、この駆動ソレノイド423にコントローラ410からの駆動信号が入力される。
第1吐出油路471と戻り油路477との間に、起伏シャットオフバルブ430が設けられている。起伏シャットオフバルブ430は、第1吐出油路471と戻り油路477とを遮断する遮断位置430aと、第1吐出油路471と戻り油路477とを連通させる連通位置430bとに切り換え可能に構成される。起伏シャットオフバルブ430の連通位置430b側の端部に、駆動ソレノイド431が設けられており、この駆動ソレノイド431にコントローラ410からの駆動信号が入力される。
埋設物検出器408は、オーガモータ21における入力側の作動油圧と排出側の作動油圧との差圧、すなわち、油路21aと油路21bとの作動油の差圧を検出する差圧検出器により構成され、この差圧に対応した検出信号をコントローラ410に送出する。
次に、このように構成される作動制御装置400の作動について、図21を追加参照して試掘時の作動を中心に説明する。なお、ここで説明する作動制御装置400の作動は、試掘用アースオーガ43を自重により地面に接触させて試掘を行う場合を想定しているが、必要に応じて操作ハンドル70(270,370)を装着して作業者Mによる押し付け力を追加付与したり、振動装置60を稼働させても良い。
まず、試掘用角柱シャフト41に対して試掘用アースオーガ43が下方にスライド移動可能となるように、試掘用角柱シャフト41の上部に試掘用アースオーガ43を位置させた状態で、試掘用アースオーガ43、筒状部材50および振動装置60の自重により、試掘用アースオーガ43を地面に接触させる。すなわち、試掘用アースオーガ43を、試掘用角柱シャフト41に対して軸方向(上下方向)にスライド移動可能な状態で、地面に接触させる。
そして、モード選択スイッチ7を操作して試掘モードSを選択し、第1操作装置6のオーガ操作レバーL5を操作して、オーガモータ21を正回転させて試掘を開始する。コントローラ410のCPU10bは、モード選択スイッチ7から送出される試掘モードSに対応した操作信号に基づいて、メモリ10aの中から試掘モードSに関するプログラム情報(警報トルク値T1および規制トルク値T2)を読み出す。CPU10bは、埋設物検出器408から送出される検出信号を基にして、オーガモータ21の駆動トルク値Tを検出し、この駆動トルク値Tをメモリ10aから読み出した警報トルク値T1および規制トルク値T2と比較する。
比較の結果、駆動トルク値T<警報トルク値T1と判断した場合(図21における時間t1までの状態)、駆動ソレノイド423へ駆動信号を入力しない制御を行い、これによってオーガシャットオフバルブ420は遮断位置422aに保持される。これにより、オーガ制御バルブV5から油路21aに供給された作動油は、オーガモータ21に供給されてオーガモータ21を回転駆動させた後、油路21bを介してオーガモータ21に戻されるので、試掘用アースオーガ43はオーガ操作レバーL5の操作に応じて回転駆動される。試掘用アースオーガ43が埋設物に接触することなく試掘が行われている間、掘削抵抗が小さくオーガモータ21は比較的小さなトルクで駆動されるので、駆動トルク値T<警報トルク値T1と判断され、オーガ操作レバーL5の操作に応じて試掘用アースオーガ43が回転駆動される。
比較の結果、警報トルク値T1≦駆動トルク値T<規制トルク値T2と判断した場合(図21における時間t1〜t2の状態)、駆動ソレノイド423へ駆動信号を入力しない制御を行うとともに、警報装置9に作動信号を出力して警報装置9を作動させる。これにより、試掘用アースオーガ43をオーガ操作レバーL5の操作に応じて回転駆動させた状態で、試掘用アースオーガ43が地中の埋設物に接触している可能性があることを報知する。このとき、埋設物以外の物体であって地面よりも硬い物体(例えば岩等)に接触している可能性もある。
比較の結果、駆動トルク値T≧規制トルク値T2と判断した場合(図21における時間t2の状態)、駆動ソレノイド423へ駆動信号を入力する制御を行い、これによってオーガシャットオフバルブ420が連通位置422aに切り換えられる。これにより、オーガシャットオフバルブ420を介して油路21aと油路21bとが連通され、油路21aに供給された作動油がオーガモータ21に入力されることなく、オーガシャットオフバルブ420および油路21bを通ってオーガ制御バルブV5に戻され、オーガモータ21の回転駆動は停止される。試掘用アースオーガ43が埋設物に接触すると、掘削抵抗が大きくなりそれに応じてオーガモータ21の駆動トルクも大きくなるので駆動トルク値T≧規制トルク値T2と判断され、オーガ操作レバーL5の操作に拘わらずオーガモータ21の回転駆動が停止される。このようにして、試掘時に試掘用アースオーガ43が埋設物に接触した場合には、自動でオーガモータ21の回転駆動が停止されるので、埋設物の損傷を確実に防止できる。
上述の作動制御装置400において、図21の時間t2でオーガモータ21の回転駆動を停止させた後、オーガ操作レバーL5の中立位置(オーガモータ21の回転駆動を停止させる操作位置)に対応する操作信号(操作検出器S5からのオフ作動に対応した操作信号)が検出されるまでの間、オーガモータ21の回転駆動を停止させた状態を維持する構成になっている。このため、オーガモータ21の回転駆動を再開させるためには、オーガ操作レバーL5を一旦中立位置に戻す必要があり、作業者に注意を喚起することができる。このときに、警報装置9を作動させれば、確実に注意を喚起することができる。
上述の作動制御装置400において、操作検出器S1〜S5をリミットスイッチに代えてポテンショメータにより構成し、操作レバーL1〜L5の傾動操作方向および傾動操作量を検出できるように構成した上で、オーガ操作レバーL5の傾動操作量に応じて、警報トルク値T1および規制トルク値T2を可変設定する構成が好ましい。例えば比較的硬い地面を試掘する場合、掘削抵抗が大きくなるため、一般的に、オーガ操作レバーL5の操作量が大きくなるように操作して、オーガモータ21の回転速度を高く設定して試掘が行われる。このとき、掘削抵抗に応じて比較的高い駆動トルクTが算出されるのであるが、オーガ操作レバーL5の操作量に対応させて警報トルク値T1および規制トルク値T2が高く設定されていれば、埋設物に接触していないにも拘わらずオーガモータ21の回転駆動が自動的に規制されるという事態を防止できる。つまり、このように構成すれば、地面の硬さに応じた適切な規制トルク値T2を設定することができ、地面を確実に試掘することができる。
上述の作動制御装置400において、オーガ制御バルブV5を機械式の制御バルブに代えて電磁比例バルブを用いて構成し、図21の時間t2でオーガモータ21の回転駆動が停止された後、オーガ操作レバーL5を操作してオーガモータ21を再度正転方向に回転駆動させる際に、オーガモータ21を逆転方向に回転駆動させ、その後正転方向に回転駆動させる構成が好ましい。このように構成すれば、試掘用アースオーガ43に作用する駆動トルクを解除できるので、この作動を繰り返して同様の駆動トルクTの波形が検出される場合、埋設物に接触していると判断することができる。なお、駆動トルクTの波形を比較する際、例えば単位時間当たりの駆動トルクTの変化量を基にして比較することが可能である。
上述の作動制御装置400において、オーガ制御バルブV5を機械式の制御バルブに代えて電磁比例バルブを用いて構成し、図21の時間t2でオーガモータ21の回転駆動を停止させた後、オーガ操作レバーL5への操作に基づいてオーガモータ21を回転駆動させる際に、オーガ操作レバーL5の傾動操作量に対応した回転速度よりも遅い回転速度で回転駆動させる構成が好ましい。このように構成すれば、試掘用アースオーガ43が埋設物に接触した状態で回転駆動される場合に、埋設物に作用する衝撃が低減されて埋設物の損傷を防止できる。
上述の作動制御装置400において、電動モータM1を駆動させて油圧ポンプP4から作動油供給を行っている場合、電動モータM1における消費電力(消費電流)に基づいて、駆動トルクTを算出することも可能である。また、電動モータM1への指令信号(入力電力)とこの回転速度とを基にして、駆動トルクTを算出することも可能である。なお、油圧式のオーガモータ21に代えてオーガ駆動用の電動モータを搭載し、この電動モータにより試掘用アースオーガ43を駆動させる構成においては、出力トルクが一定となるようにオーガ駆動用の電動モータを制御する場合、オーガ駆動用の電動モータの回転速度が所定回転速度以下に低下したときに、埋設物に接触しているとして電動モータの回転駆動を停止させる。
上述の作動制御装置400において、試掘用アースオーガ43が埋設物に接触したときには、駆動トルクTが急激に上昇することから、単位時間あたりの駆動トルクTの変化量に基づいて警報装置9を作動させたり、試掘用アースオーガ43の回転駆動を停止させて埋設物の損傷を防止することも可能である。具体的には、試掘モードSに関するプログラム情報として、試掘用アースオーガ43が埋設物に接触したことを検出するための単位時間あたりの駆動トルクの変化量T3を記憶させておく。この構成においては、駆動トルクTの単位時間あたりの変化量を変化量T3と比較し、駆動トルクTの単位時間あたりの変化量が変化量T3に達したと判断した場合に(図22における時間t3)警報装置9を作動させ、もしくは、オーガモータ21の回転駆動を停止させ、または警報装置9を作動させるとともにオーガモータ21の回転駆動を停止させる。なお、図22には、時間の経過とともに試掘作業が進んで、排土のためのトルクが増加することにより、検出される駆動トルクTが徐々に増加している状態を示している。
以上ここまで、作業者の感覚に頼ることなく埋設物の破損を防止できる穴掘建柱車1として、作動制御装置400を備えた構成について説明した。次に、別の作動制御装置500の構成について、図19および図20を参照しながら説明する。なお、上述した作動制御装置400と同一部材には同一番号を付して、それについての説明を省略する。
作動制御装置500は、第1操作装置6と、モード選択スイッチ7と、警報装置9と、埋設物検出器508と、コントローラ510と、油圧供給ユニット468とから構成される。埋設物検出器508は、角柱シャフトに対して軸方向にスライド移動自在に取り付けられた試掘用アースオーガ43の、角柱シャフトに対する軸方向へのスライド位置(ストローク)を検出するためのものであって、非接触型センサにより構成される。埋設物検出器508は、上記スライド位置を検出し、そのスライド位置に対応する検出信号をコントローラ510に送出する。
コントローラ510のメモリ10aには、本掘モードDに関するプログラム情報と、試掘モードSに関するプログラム情報とが記憶されている。本掘モードDに関するプログラム情報は、コントローラ410のものと同一である。試掘モードSに関するプログラム情報として、試掘用アースオーガ43の軸方向のスライド位置の変化量を基にして、試掘用アースオーガ43が埋設物に接触していることを検出するための所定時間t0が記憶されている。
次に、このように構成される作動制御装置500の作動について、図23を追加参照して試掘時の作動を中心に説明する。
試掘を行う際には、まず第1操作装置6を操作して、試掘用アースオーガ43を自重で地面に略垂直に接触させた状態とする。このとき、モード選択スイッチ7を操作して試掘モードSを選択しておき、第1操作装置6のオーガ操作レバーL5を操作して、オーガモータ21を正回転させて試掘を開始する。コントローラ510のCPU10bは、モード選択スイッチ7から送出される試掘モードSに対応した操作信号に基づいて、メモリ10aの中から試掘モードSに関するプログラム情報(所定時間t0)を読み出す。そして、CPU10bは、埋設物検出器508から送出される検出信号を基にして、試掘用アースオーガ43のスライド位置(試掘開始時の位置を零とし、この位置に対するスライド位置)を検出し、さらにこのスライド位置から単位時間あたりのスライド移動量を検出する。
試掘用アースオーガ43が埋設物に接触することなく試掘が行われている間(図23における時間t4までの状態)は、角柱シャフトに対して下方に試掘用アースオーガ43がスライド移動して地面に入り込むため、正のスライド移動量が検出される。CPU10bは、正のスライド移動量が検出されると判断した場合、駆動ソレノイド423へ駆動信号を入力しない制御を行い、これによってオーガシャットオフバルブ420は遮断位置422aに保持される。これにより、オーガ制御バルブV5から油路21aに供給された作動油は、オーガモータ21に供給されてオーガモータ21を回転駆動させた後、油路21bを介してオーガモータ21に戻されるので、試掘用アースオーガ43はオーガ操作レバーL5の操作に応じて回転駆動される。
ところが、試掘用アースオーガ43が埋設物に接触すると、掘削抵抗が大きくなるため、試掘用アースオーガ43が下方にスライド移動しにくくなり、ほぼ同じスライド位置が継続して検出される(図23の時間t4〜t5)。この状態では、単位時間あたりのスライド移動量はほぼ零となり、CPU10bはこの単位時間あたりのスライド移動量がほぼ零の状態の継続時間を計測し、これをメモリ10aから読み出した所定時間t0と比較する。そして、計測された継続時間が所定時間t0に達したと判断すると(図23における時間t5)、駆動ソレノイド423へ駆動信号を入力する制御を行い、これによってオーガシャットオフバルブ420が連通位置422aに切り換えられる。これにより、オーガシャットオフバルブ420を介して油路21aと油路21bとが連通され、油路21aに供給された作動油がオーガモータ21に入力されることなく、オーガシャットオフバルブ420および油路21bを通ってオーガ制御バルブV5に戻され、オーガモータ21の回転駆動は停止される。このように、試掘時に試掘用アースオーガ43が埋設物に接触した場合、自動でオーガモータ21の回転駆動が停止されるので埋設物の損傷を防止できる。なお、このときに、オーガモータ21の回転駆動を停止させるとともに警報装置9を作動させれば、異常状態が発生したことによりオーガモータ21が停止したことを作業者に認識させることができる。
上述の作動制御装置500において、コントローラ510のメモリ10aに、試掘モードSに関するプログラム情報として、所定時間t0に加えて、試掘により掘削すべき試掘穴深さS0を記憶させる構成も可能である。この構成では、CPU10bは、モード選択スイッチ7から送出される試掘モードSに対応した操作信号に基づいて、メモリ10aの中から試掘モードSに関するプログラム情報(所定時間t0および試掘穴深さS0)を読み出す。そして、CPU10bは、試掘用アースオーガ43のスライド位置と読み出した試掘穴深さS0と比較し、スライド位置が試掘穴深さS0に達したと判断すると(図23における時間t6)、オーガモータ21の回転駆動を停止させる。これにより、要求される深さの試掘穴を簡単且つ正確に掘削することができる。
上述の作動制御装置500において、スライド移動量がほぼ零の状態の継続時間が所定時間t0に達したと判断したときに(図23における時間t5)、オーガモータ21の回転駆動を停止させる制御に代えて、警報装置9を作動させても良い。
以上ここまで、作業者の感覚に頼ることなく埋設物の破損を防止できる穴掘建柱車1として、作動制御装置500を備えた構成について説明した。次に、別の作動制御装置600の構成について、図19および図20を参照しながら説明する。なお、上述した作動制御装置400と同一部材には同一番号を付して、それについての説明を省略する。
作動制御装置600は、第1操作装置6と、モード選択スイッチ7と、警報装置9と、埋設物検出器608と、コントローラ610と、油圧供給ユニット468とから構成される。埋設物検出器608は、試掘用アースオーガ43に取り付けられて、試掘用アースオーガ43に発生する振幅を検出する振動計である。埋設物検出器608は、試掘用アースオーガ43に発生する振幅を検出し、その振幅に対応する検出信号をコントローラ610に送出する。
コントローラ610のメモリ10aには、本掘モードDに関するプログラム情報と、試掘モードSに関するプログラム情報とが記憶されている。本掘モードDに関するプログラム情報は、コントローラ410のものと同一である。試掘モードSに関するプログラム情報として、試掘用アースオーガ43が埋設物に接触したことを検出するための振動上限値VUおよび振動下限値VLが記憶されている。試掘用アースオーガ43が埋設物に接触する場合、通常、接触時の衝撃により地面を掘削しているときよりも大きな振幅が発生する。また、埋設物に接触することにより掘削抵抗を受けて、試掘用アースオーガ43の駆動トルクが不足して回転が減少したり停止することもあるが、このときには振幅が、地面を掘削しているときよりも小さくなったり、ほぼなくなったりする。このような現象を検出するために、振動上限値VUおよび振動下限値VLが記憶されている。なお、ダイヤルスイッチ等により、振動上限値VUおよび振動下限値VLを可変設定できる構成が好ましく、このような構成とすれば、掘削状況に応じた適切な振動上限値VUおよび振動下限値VLを設定できる。
次に、このように構成される作動制御装置600の作動について、図24を追加参照して試掘時の作動を中心に説明する。
試掘を行う際には、まず第1操作装置6を操作して、試掘用アースオーガ43を自重で地面に略垂直に接触させた状態とする。このとき、モード選択スイッチ7を操作して試掘モードSを選択しておき、第1操作装置6のオーガ操作レバーL5を操作して、オーガモータ21を正回転させて試掘を開始する。コントローラ610のCPU10bは、モード選択スイッチ7から送出される試掘モードSに対応した操作信号に基づいて、メモリ10aの中から試掘モードSに関するプログラム情報(振動上限値VUおよび振動下限値VL)を読み出す。そして、CPU10bは、埋設物検出器608から送出される検出信号を基にして、試掘用アースオーガ43の振幅Vを検出し、この振幅Vを振動上限値VUおよび振動下限値VLと比較する。
比較の結果、振動下限値VL≦振幅V≦振動上限値VUと判断した場合(図24における時間t7までの状態)、駆動ソレノイド423へ駆動信号を入力しない制御を行い、これによってオーガシャットオフバルブ420は遮断位置422aに保持される。これにより、オーガ制御バルブV5から油路21aに供給された作動油は、オーガモータ21に供給されてオーガモータ21を回転駆動させた後、油路21bを介してオーガモータ21に戻されるので、試掘用アースオーガ43はオーガ操作レバーL5の操作に応じて回転駆動される。試掘用アースオーガ43が掘削地面よりも硬い埋設物に接触することなく試掘が行われている間、試掘用アースオーガ43はその自重により地面に押し付けられて安定しているので、振動下限値VL≦振幅V≦振動上限値VUと判断され、オーガ操作レバーL5の操作に応じて試掘用アースオーガ43が回転駆動される。
比較の結果、振動下限値VL>振幅V(埋設物に接触して振幅Vが小さくなる場合)、もしくは振幅V>振動上限値VU(埋設物に接触して振幅Vが大きくなる場合)と判断した場合(図24における時間t7の状態)、駆動ソレノイド423へ駆動信号を入力する制御を行い、これによってオーガシャットオフバルブ420が連通位置422aに切り換えられる。これにより、オーガシャットオフバルブ420を介して油路21aと油路21bとが連通され、油路21aに供給された作動油がオーガモータ21に入力されることなく、オーガシャットオフバルブ420および油路21bを通ってオーガ制御バルブV5に戻され、オーガモータ21の回転駆動は停止される。このように、地面を掘削しているときに検出される振幅範囲VL〜VUを外れる振幅が検出されたときには、オーガ操作レバーL5の操作に拘わらずオーガモータ21の回転駆動が停止される。
このようにして、試掘時に試掘用アースオーガ43が埋設物に接触した場合には、自動でオーガモータ21の回転駆動が停止されるので、埋設物の損傷を確実に防止できる。なお、このときに、オーガモータ21の回転駆動を停止させるとともに警報装置9を作動させれば、異常状態が発生したことによりオーガモータ21が停止したことを作業者に認識させることができる。
上述の作動制御装置600において、試掘用アースオーガ43が埋設物に接触した状態で回転駆動されると、図25に示すように、試掘用アースオーガ43の一部が回転駆動に伴って周期的に埋設物に接触し、振幅Vが大きく変動する波形が試掘用アースオーガ43の回転に応じた周期で検出されることがある(時間t8,t9,t10)。そこで、このように振幅Vが大きく変動する波形が所定回数検出されたときに、オーガモータ21の回転駆動を停止させることにより埋設物の損傷を防止できる。なお、上記所定回数は、試掘モードSに関するプログラム情報として、予めメモリ10aに記憶されている。なお、振幅Vが大きく変動する波形の検出は、例えば単位時間あたりの振幅Vの変化量に基づいて行うことができる。
上述の作動制御装置600において、試掘用アースオーガ43が埋設物に接触したときには、振幅Vが急激に変動することから、単位時間あたりの振幅Vの変化量に基づいて、試掘用アースオーガ43の回転駆動を停止させて埋設物の損傷を防止することも可能である。なお、この構成においては、試掘モードSに関するプログラム情報に、試掘用アースオーガ43が埋設物に接触したことを検出するための閾値として、単位時間あたりの振幅Vの変化量が予めメモリ10aに記憶されている。
上述の作動制御装置600において、振動装置60を稼働させる場合、この振動装置60により与えられる振動も埋設物検出器608によって検出される。そこで、振動装置60で発生する振動の周波数を、地面を掘削するときに試掘用アースオーガ43に発生する振動の周波数と異なるように設定しておく。そうすれば、埋設物検出器608により得られる振動波形から、振動装置60による振動を特定して除去することができ、これによって振動装置60を稼働させる場合であっても、試掘用アースオーガ43の振幅に基づいて埋設物に接触したことを正確に検出できる。また、試掘モードSに関するプログラム情報として、振動装置60が稼動しているときに読み出される振動上限値VUおよび振動下限値VLと、振動装置60が停止しているときに読み出される振動上限値VUおよび振動下限値VLとを、別々に記憶しておく構成でも良い。振動装置60停止時の振動上限値VU〜振動下限値VLの幅に対して、振動装置60稼動時の振動上限値VU〜振動下限値VLの幅を大きく設定すれば、振動装置60が稼動時にも埋設物に接触したことを正確に検出できる。
以上ここまで、作動制御装置600を備えて構成される穴掘建柱車1について説明した。ところで、試掘作業を行う場合、試掘用アースオーガ43近傍に作業者が位置して掘削状況を確認し、別の作業者が掘削状況に応じて第1操作装置6を操作してオーガモータ21を駆動させることがある。この場合、掘削状況を確認する作業者は、自身がオーガモータ21の駆動操作を行うのではないため、不便に感じることがある。そこで、第1操作装置6とは別に、ケーブルによりコントローラ710と電気的に接続可能に構成された第2操作装置701(図19参照)を設け、掘削状況を確認する作業者自身が第2作業装置701を操作してオーガモータ21の駆動操作を行うようにすれば便利になり、また、自身で操作を行うので安全を確保しすい。
そこで、図19および図20に示す作動制御装置700を搭載して穴掘建柱車1が構成される。作動制御装置700は、第1操作装置6と、モード選択スイッチ7と、警報装置9と、第2操作装置701と、コントローラ710と、油圧供給ユニット468とから構成される。なお、上述した作動制御装置400と同一部材には同一番号を付して、それについての説明を省略する。
第2操作装置701は、図示しないケーブルを介してコントローラ710と電気的に接続されており、電動モータM1の駆動操作を行うことができるように構成されている。第2操作装置701への操作に対応した操作信号が、ケーブルを介して第2操作装置701からコントローラ710に送出され、この操作信号に対応した指令信号が電動モータM1に出力されて、電動モータM1が駆動制御されるようになっている。コントローラ710のメモリ10aには、本掘モードDに関するプログラム情報と、試掘モードSに関するプログラム情報とが記憶されている。本掘モードDに関するプログラム情報は、コントローラ410のものと同一である。試掘モードSに関するプログラム情報として、第2操作装置701が用いられるときに、第1操作装置6への操作に基づく作動を規制するプログラム情報が記憶されている。なお、第2操作装置701を用いて試掘を行うときには、エンジンEを停止させた状態で電動モータM1を駆動させることにより、油圧ポンプP4から作動油を供給させて行われる。このとき、オーガ操作レバーL5が操作されて、オーガ制御バルブV5が開状態に保持されている。よって、第2操作装置701を操作して電動モータM1を駆動させると、電動モータM1の回転速度に対応した量の作動油がオーガモータ21に供給される。
次に、このように構成される作動制御装置700の作動について、試掘用アースオーガ43近傍に位置する作業者が第2操作装置701を操作して試掘を行う場合を説明する。
試掘を行う際、まず、ケーブル(コネクタ)を介してコントローラ710に第2操作装置701を電気的に接続する。そして、モード選択スイッチ7を操作して試掘モードSを選択すると、コントローラ710のCPU10bは、モード選択スイッチ7から送出される試掘モードSに対応した操作信号を受け、メモリ10aの中から試掘モードSに関するプログラム情報を読み出す。試掘モードSに関するプログラム情報は、例えば第1操作装置6の起伏操作レバーL2が操作されて、操作検出器S2から操作信号が入力された場合、起伏シャットオフバルブ430の駆動ソレノイド431へ駆動信号を入力するように構成されている。このため、第1操作装置6の起伏操作レバーL2が操作されると、起伏シャットオフバルブ430は連通位置430bに切り換えられ、第1吐出油路471に供給された作動油が、起伏制御バルブV2に供給されることなく戻り油路477を介してオイルタンクに戻される。よって、第1操作装置6の起伏操作レバーL2が操作されても、その操作に応じてブーム13は起伏作動しないので、試掘用アースオーガ43近傍に位置する作業者の安全が確保される(以下、第1操作装置6の入力規制と称す)。
上述の作動制御装置700において、試掘モードSに関するプログラム情報として、第1操作装置6への操作に基づく油圧アクチュエータの作動速度を、本掘時よりも低速に設定する構成も可能である(以下、第1操作装置6の入力制限と称す)。この構成によれば、試掘モードSが選択されて試掘作業を行うときに第1操作装置6が操作されても、その操作に基づく油圧アクチュエータの作動速度は本掘モードDが選択された場合よりも低速なので、試掘用アースオーガ43近傍に位置して掘削状況を確認しながら第2操作装置701を操作する作業者の安全を確保しやすくなる。
上述の作動制御装置700において、試掘モードSに関するプログラム情報として、試掘作業時にブーム13先端が位置すると想定される試掘領域を記憶する構成も可能である。この構成においては、コントローラ710にブーム13の旋回位置、伸縮量および起伏角が入力され、これらを基にブーム13先端の位置が算出される。そして、モード選択スイッチ7からの操作信号に基づいて試試掘モードSに関するプログラム情報を読み出し、算出されたブーム13先端の位置が試掘領域内にあるか否かを判断する。その結果、ブーム13先端の位置が試掘領域内にあると判断した場合には、上述の第1操作装置6による操作の入力規制もしくは入力制限を行いつつ第2操作装置701による操作を可能とする。
また、ブーム13先端の位置が試掘領域内にある場合であって、第2操作装置701がコントローラ710に電気的に接続された状態では、試掘用アースオーガ43や操作ハンドルが装着されている可能があり、このまま第1操作装置6の操作に基づいてブーム13を格納させると、これらを損傷させる虞がある。そこで、この場合には、第1操作装置6の操作に基づくブーム13の格納を規制することが好ましい。
上述の実施形態において、試掘用アースオーガ43の駆動状態に基づいて埋設物に接触したと判断したときに、オーガモータ21の回転駆動を停止させる構成を例示して説明したが、これに代えてオーガモータ21を減速させたり、または駆動源(エンジンEもしくは電動モータM1)を停止させることも可能である。
上述の実施形態において、モード選択スイッチ7は、穴掘建柱車1の任意の箇所に設けることが可能であり、例えば第1操作装置6や、第2操作装置701に設けることが可能である。
上述の実施形態において、試掘用アースオーガ43の駆動状態に基づいて埋設物に接触したことを検出する方法として、駆動トルクTの検出、スライド位置の変化量の検出および振動の検出を例示したが、これらを複数組み合わせて試掘用アースオーガ43の駆動状態を検出するようにしても良い。
上述の実施形態において、モード選択スイッチ7を設ける構成に代えて、操作ハンドルの取付部分に、この操作ハンドルが装着されたことを検出する試掘モード検出手段(例えば、リミットスイッチ等)を設ける構成も可能である。この構成においては、試掘用アースオーガ装置に操作ハンドルが装着されたことが試掘モード検出手段により検出されると、試掘モードSに切り換えられる。また、第2操作装置701がケーブル(コネクタ)を介してコントローラ710に電気的に接続されたことに基づいて、試掘モードSに切り換えられる構成としても良い。
上述の実施形態において、モード選択スイッチ7を設ける構成に代えて、試掘用アースオーガ装置の近傍に作業者が存在することを検出する人感センサを設ける構成でも良い。試掘時には通常、試掘用アースオーガ43の近傍で作業者が掘削状況を確認しながら作業を行うため、センサによって作業者の存在が検出されると、メモリ10aに記憶された試掘モードSに関するプログラム情報が読み出されて実行される。
上述の実施形態において、第1操作装置6に連結された機械式の制御バルブV1〜V5を例示して説明したが、これに代えて電磁比例バルブを用いることも可能である。
上述の試掘用アースオーガ装置40において、試掘用角柱シャフト41に対する試掘用アースオーガ43のスライド移動位置が目視で確認できるように、試掘用角柱シャフト41に目印を設けた構成が好ましい。このように構成すれば、作業者は試掘用アースオーガ43がどれほどの深さまで地面に入り込んでいるのかを一目で把握でき、試掘作業をスムーズに行うことができる。
上述の実施形態では、油圧式のオーガモータ21を備えて構成されるアースオーガ装置を例示して説明したが、これに代えて電動式のオーガモータを用いてアースオーガ装置を構成することも可能である。
上述の実施形態においては、試掘時に埋設物を損傷させないように構成された掘削刃部80,90,150,180を例示して説明したが、本発明はこれらの形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で適宜変更可能である。