JP6333835B2 - 機器を移動させるためのセンサ - Google Patents
機器を移動させるためのセンサ Download PDFInfo
- Publication number
- JP6333835B2 JP6333835B2 JP2015540245A JP2015540245A JP6333835B2 JP 6333835 B2 JP6333835 B2 JP 6333835B2 JP 2015540245 A JP2015540245 A JP 2015540245A JP 2015540245 A JP2015540245 A JP 2015540245A JP 6333835 B2 JP6333835 B2 JP 6333835B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- force
- unit
- movement
- user
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004590 computer program Methods 0.000 claims description 18
- 238000000034 method Methods 0.000 claims description 17
- 238000012545 processing Methods 0.000 claims description 15
- 230000009471 action Effects 0.000 claims description 12
- 238000003384 imaging method Methods 0.000 claims description 12
- 229920002595 Dielectric elastomer Polymers 0.000 claims description 9
- 238000003825 pressing Methods 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 6
- 238000010008 shearing Methods 0.000 claims 2
- 239000010410 layer Substances 0.000 description 18
- 230000001419 dependent effect Effects 0.000 description 5
- 238000002059 diagnostic imaging Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012806 monitoring device Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 230000003936 working memory Effects 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000001217 buttock Anatomy 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 229920001746 electroactive polymer Polymers 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 210000002414 leg Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000015541 sensory perception of touch Effects 0.000 description 1
- 210000002832 shoulder Anatomy 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0447—Position sensing using the local deformation of sensor cells
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/467—Arrangements for interfacing with the operator or the patient characterised by special input means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/19—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by positioning or contouring control systems, e.g. to control position from one programmed point to another or to control movement along a programmed continuous path
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0445—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using two or more layers of sensing electrodes, e.g. using two layers of electrodes separated by a dielectric layer
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/96—Touch switches
- H03K17/962—Capacitive touch switches
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/965—Switches controlled by moving an element forming part of the switch
- H03K17/975—Switches controlled by moving an element forming part of the switch using a capacitive movable element
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0487—Motor-assisted positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/10—Safety means specially adapted therefor
- A61B6/102—Protection against mechanical damage, e.g. anti-collision devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4435—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure
- A61B6/4441—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure the rigid structure being a C-arm or U-arm
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/04—Force
- F04C2270/041—Controlled or regulated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/24—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance
- G01D5/241—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance by relative movement of capacitor electrodes
- G01D5/2417—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance by relative movement of capacitor electrodes by varying separation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/43—Speed, acceleration, deceleration control ADC
- G05B2219/43162—Motion control, movement speed combined with position
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/96—Touch switches
- H03K2017/9602—Touch switches characterised by the type or shape of the sensing electrodes
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K2217/00—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00
- H03K2217/94—Indexing scheme related to electronic switching or gating, i.e. not by contact-making or -breaking covered by H03K17/00 characterised by the way in which the control signal is generated
- H03K2217/96—Touch switches
- H03K2217/96062—Touch switches with tactile or haptic feedback
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Optics & Photonics (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- High Energy & Nuclear Physics (AREA)
- Pathology (AREA)
- Manufacturing & Machinery (AREA)
- Automation & Control Theory (AREA)
- User Interface Of Digital Computer (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Mechanical Control Devices (AREA)
- Manipulator (AREA)
Description
Claims (15)
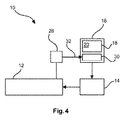
- 機器を移動させる駆動装置であって、
モータ駆動されるポジショニングユニットと、
中央処理ユニットと、
少なくとも1つのセンサユニットを有するユーザインタフェースと、
を有し、
前記モータ駆動されるポジショニングユニットは、可動機器の移動を行うように構成され、
前記中央処理ユニットは、前記モータ駆動されるポジショニングユニットによって前記可動機器の移動を制御し、
前記少なくとも1つのセンサユニットは、前記可動機器に配された少なくとも1つのタッチセンシティブ領域を有し、それにより、力が、ユーザによって、前記タッチセンシティブ領域の表面に触れる際、意図される移動方向に一致する作用方向に達成可能であり、
前記タッチセンシティブ領域は、前記力のひずみ及び方向を検出し及びその情報を提供する変形可能な容量性センサであり、前記タッチセンシティブ領域の前記表面が変形可能であり、前記表面の変形により検出される前記力が押圧力及びせん断力であり、
前記少なくとも1つのセンサユニットは、前記力に依存して制御信号を前記中央処理ユニットに供給し、
前記少なくとも1つのセンサユニットは、前記可動機器に固定的に取り付けられる、駆動装置。 - 前記センサユニットは、i)圧力、及びii)圧力の作用方向、の少なくとも1つに依存して前記制御信号を供給する、請求項1に記載の駆動装置。
- 前記センサユニットは、前記力のベクトル成分に対応する移動ベクトル成分をもつ移動制御信号を供給する、請求項1に記載の駆動装置。
- 前記ユーザインタフェースは、ユーザが前記センサユニットに触れている間ユーザに触覚信号を提供する触覚フィードバックユニットを有する、請求項1に記載の駆動装置。
- 衝突制御ユニットが、前記可動機器の近づきつつある衝突を検出するために設けられ、フィードバックが、前記タッチセンシティブ領域を通じて触覚警告信号として提供される、請求項1又は4に記載の駆動装置。
- 前記可動機器が医療装置であり、前記モータ駆動されるポジショニングユニットは、検査室内において前記医療機器の移動を行うように構成される、請求項1乃至5のいずれか1項に記載の駆動装置。
- 医用検査システムであって、イメージング装置、患者支持体、及びディスプレイを含むグループからの少なくとも1つの可動医療機器を有し、前記可動医療機器のうち少なくとも1つが、可動支持体であるとともに、請求項1乃至6のいずれか1項に記載の駆動装置を具備し、前記少なくとも1つのセンサユニットが、前記可動医療機器に取り付けられる、医用検査システム。
- 前記イメージング装置が、CアームX線イメージングシステムのCアーム装置であり、前記センサ表面が、X線検出器又はX線源の2つの側面に少なくとも設けられる、請求項7に記載の医用検査システム。
- 前記患者支持体が患者テーブルであり、前記センサ表面が、前記患者テーブルの2つの側面に少なくとも設けられる、請求項7又は8に記載の医用検査システム。
- 前記センサ表面が、前記可動医療機器上に大きい表面として提供され、前記大きい表面は、少なくとも医療機器のエッジに沿った半分の長さ、少なくとも30cmの長さ、及び少なくとも20cm×20cmの表面面積を含むグループのうちの少なくとも1つを有する、請求項7乃至9のいずれか1項に記載の医用検査システム。
- 作動力の方向を検出するためのタッチセンシティブ領域をもつセンサであって、
第1及び第2の電極層と、
誘電エラストマと、
を有し、前記第1及び前記第2の層は、前記誘電エラストマによって、前記センサに作用する圧力に従う可変の距離隔てられており、前記第1及び前記第2の電極層の一方は、前記第1及び前記第2の電極層の他方の少なくとも2つの電極と少なくとも部分的に重なる少なくとも1つの電極を有し、局所的な容量変化が、作用する力に関するひずみ及び方向を検出し及びその情報を提供し、前記タッチセンシティブ領域の表面が変形可能であり、前記表面の変形により検出される前記力が押圧力及びせん断力であり、前記表面に作用する前記力の方向が前記センサに固定的に取り付けられる可動機器の意図される移動方向に一致する、センサ。 - 前記作用する力の方向は、前記第2の層の前記少なくとも2つの電極のうち第1の電極と前記第1の層の電極との間の距離と、前記第2の層の前記少なくとも2つの電極のうち第2の電極と前記第1の層の電極との間の距離との差から決定される、請求項11に記載のセンサ。
- 機器を移動させる方法であって、
a)ユーザインタフェースのセンサユニットのタッチセンシティブ領域の変形可能な表面に触れるステップであって、前記センサユニットは可動機器に取り付けられるものである、ステップと、
b)ユーザによって前記タッチセンシティブ領域の前記表面に印加される力のひずみ及び方向に依存して制御信号を生成するステップであって、前記タッチセンシティブ領域は、ユーザによって印加される前記力のひずみ及び方向を検出し及びその情報を提供する変形可能な容量性センサであり、前記表面の変形により検出される前記力が押圧力及びせん断力であり、前記表面に印加される前記力の方向が前記可動機器の意図される移動方向に一致する、ステップと、
c)前記生成された制御信号を中央処理ユニットに供給するステップと、
d)前記制御信号に基づいて、モータ駆動されるポジショニングユニットを作動させるステップと、
を含む方法。 - 請求項1乃至6のいずれか1項に記載の駆動装置又は請求項7乃至10のいずれか1項に記載の医用検査システムを制御するためのコンピュータプログラムであって、請求項13に記載の方法の各ステップを処理ユニットに実施させるコンピュータプログラム。
- 請求項14に記載のコンピュータプログラムを記憶したコンピュータ可読媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261722858P | 2012-11-06 | 2012-11-06 | |
| US61/722,858 | 2012-11-06 | ||
| PCT/IB2013/059660 WO2014072869A1 (en) | 2012-11-06 | 2013-10-25 | Sensor for moving equipment |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015535190A JP2015535190A (ja) | 2015-12-10 |
| JP2015535190A5 JP2015535190A5 (ja) | 2016-12-08 |
| JP6333835B2 true JP6333835B2 (ja) | 2018-05-30 |
Family
ID=50023803
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015540245A Active JP6333835B2 (ja) | 2012-11-06 | 2013-10-25 | 機器を移動させるためのセンサ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9851708B2 (ja) |
| EP (1) | EP2916736B1 (ja) |
| JP (1) | JP6333835B2 (ja) |
| CN (1) | CN104768466B (ja) |
| BR (1) | BR112015009951A2 (ja) |
| RU (1) | RU2015121365A (ja) |
| WO (1) | WO2014072869A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6176832B2 (ja) * | 2013-04-18 | 2017-08-09 | 東芝メディカルシステムズ株式会社 | 支持器及びx線診断装置 |
| DE102014218119B4 (de) * | 2014-09-10 | 2021-03-04 | Siemens Healthcare Gmbh | Patiententransportsystem |
| JP6522930B2 (ja) * | 2014-11-28 | 2019-05-29 | ファナック株式会社 | 可動部を直接手動で操作可能な数値制御工作機械 |
| DE202014009512U1 (de) * | 2014-12-02 | 2015-02-10 | Haseke Gmbh & Co. Kg | Tragarmsystem |
| WO2017065170A1 (ja) * | 2015-10-16 | 2017-04-20 | オリンパス株式会社 | 挿入装置 |
| DE102016202153B4 (de) * | 2016-02-12 | 2022-04-21 | Siemens Healthcare Gmbh | Anordnung zum Schutz von Kabeln und Leitungen bei C-Bogen und Röntgenbildgebungsgerät |
| CN206228357U (zh) * | 2016-06-03 | 2017-06-09 | 北京东软医疗设备有限公司 | 一种悬吊机架 |
| WO2018212587A1 (en) | 2017-05-18 | 2018-11-22 | Samsung Electronics Co., Ltd. | X-ray input apparatus, x-ray imaging apparatus having the same, and method of controlling the x-ray input apparatus |
| KR102274916B1 (ko) * | 2017-05-18 | 2021-07-08 | 삼성전자주식회사 | 엑스선 입력 장치, 이를 포함하는 엑스선 영상 장치 및 엑스선 입력 장치의 제어 방법 |
| EP3348201B1 (de) * | 2017-09-08 | 2019-07-10 | Siemens Healthcare GmbH | Verfahren zum positionieren einer patientenliege und patientenliege |
| EP3643240B1 (de) * | 2018-10-24 | 2021-03-17 | Siemens Healthcare GmbH | Medizinische bildgebungseinrichtung und verfahren zum betrieb einer medizinischen bildgebungseinrichtung |
| DE102021210847A1 (de) | 2021-09-28 | 2023-03-30 | Siemens Healthcare Gmbh | Steuerung einer Patiententischbewegung |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4492949A (en) * | 1983-03-18 | 1985-01-08 | Barry Wright Corporation | Tactile sensors for robotic gripper and the like |
| JPH06205764A (ja) * | 1992-12-09 | 1994-07-26 | Philips Electron Nv | ケーブルデフレクタを設けられた車輪を有するx線装置 |
| DE4421798C2 (de) * | 1994-06-22 | 1996-11-07 | Siemens Ag | Bedienvorrichtung für eine Röntgenanlage |
| US5695859A (en) * | 1995-04-27 | 1997-12-09 | Burgess; Lester E. | Pressure activated switching device |
| US6809462B2 (en) * | 2000-04-05 | 2004-10-26 | Sri International | Electroactive polymer sensors |
| JPH10258049A (ja) * | 1997-03-19 | 1998-09-29 | Hitachi Medical Corp | 医用診断装置の寝台制御装置 |
| ATE381116T1 (de) * | 1999-07-20 | 2007-12-15 | Stanford Res Inst Int | Elektroaktive polymergeneratoren |
| JP4875982B2 (ja) * | 2003-09-03 | 2012-02-15 | エスアールアイ インターナショナル | 表面変形電気活性ポリマートランスデューサ |
| DE10347738B4 (de) * | 2003-10-14 | 2012-01-26 | Siemens Ag | Motorisch verstellbares Röntgengerät und Verfahren zu dessen Verstellung |
| EP1697709B8 (en) * | 2003-12-26 | 2012-03-28 | Toyota Jidosha Kabushiki Kaisha | Convex or concave surface curvature amplifying device and convex or concave surface curvature detecting method using the same |
| WO2007126854A2 (en) * | 2006-03-28 | 2007-11-08 | Alfred E. Mann Institute For Biomedical Engineering At The University Of Southern California | Biomimetic tactile sensor |
| DE102006022141A1 (de) * | 2006-05-11 | 2007-11-15 | Siemens Ag | Verfahren zur Ausrichtung von von einem Röntgenstrahler abstrahlbaren Röntgenstrahlen auf eine Detektorfläche eines Röntgendetektors |
| JP4605474B2 (ja) * | 2006-06-06 | 2011-01-05 | サンアロー株式会社 | 多方向入力装置 |
| US8419717B2 (en) * | 2006-06-13 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| WO2008052561A1 (en) | 2006-11-03 | 2008-05-08 | Danfoss A/S | A direct acting capacitive transducer |
| DE102007002401A1 (de) * | 2007-01-17 | 2008-07-31 | Siemens Ag | Medizinische Untersuchungs- oder Interventionseinrichtung |
| DE102007006891A1 (de) | 2007-02-13 | 2008-08-14 | University Of Dundee | Haltevorrichtung für medizinische Zwecke |
| WO2009023334A2 (en) * | 2007-05-18 | 2009-02-19 | University Of Southern California | Biomimetic tactile sensor for control of grip |
| JP4368392B2 (ja) * | 2007-06-13 | 2009-11-18 | 東海ゴム工業株式会社 | 変形センサシステム |
| JP5496446B2 (ja) * | 2007-07-12 | 2014-05-21 | 東海ゴム工業株式会社 | 静電容量型センサ |
| WO2009015151A1 (en) * | 2007-07-23 | 2009-01-29 | Board Of Regents, University Of Nevada, Reno | Self-sensing dielectric actuator system |
| US8310444B2 (en) * | 2008-01-29 | 2012-11-13 | Pacinian Corporation | Projected field haptic actuation |
| US8797271B2 (en) * | 2008-02-27 | 2014-08-05 | Microsoft Corporation | Input aggregation for a multi-touch device |
| JP5192898B2 (ja) * | 2008-04-25 | 2013-05-08 | オリンパスメディカルシステムズ株式会社 | マニピュレータシステム |
| US7958789B2 (en) * | 2008-08-08 | 2011-06-14 | Tokai Rubber Industries, Ltd. | Capacitive sensor |
| CN102272702A (zh) * | 2008-11-04 | 2011-12-07 | 拜尔材料科学股份公司 | 用于触觉反馈装置的电活性聚合物换能器 |
| US8760413B2 (en) * | 2009-01-08 | 2014-06-24 | Synaptics Incorporated | Tactile surface |
| JP2010221003A (ja) * | 2009-02-26 | 2010-10-07 | Fujifilm Corp | 放射線撮影装置 |
| US8915151B2 (en) * | 2009-06-05 | 2014-12-23 | Sungkyunkwan University Foundation For Corporate Collaboration | Active skin for conformable tactile interface |
| US10068728B2 (en) * | 2009-10-15 | 2018-09-04 | Synaptics Incorporated | Touchpad with capacitive force sensing |
| JP5445196B2 (ja) * | 2010-02-10 | 2014-03-19 | セイコーエプソン株式会社 | 応力検出素子、触覚センサー、および把持装置 |
| US8450627B2 (en) * | 2010-04-01 | 2013-05-28 | Apple Inc. | Capacitive dome switch |
| US8523433B2 (en) * | 2010-05-24 | 2013-09-03 | General Electric Company | Handheld X-ray system interface device and method |
| KR101096086B1 (ko) | 2010-05-28 | 2011-12-19 | 주식회사 피치나광학 | 터치패드를 이용한 검안기 제어 장치 |
| DE102012002604A1 (de) | 2011-02-14 | 2012-08-16 | Marquardt Gmbh | Schaltbedienfeld |
| JP2012168064A (ja) * | 2011-02-15 | 2012-09-06 | Tokai Rubber Ind Ltd | 外力計測装置とそれを備えるクッション体 |
| CN102743187B (zh) | 2012-07-16 | 2014-04-30 | 上海联影医疗科技有限公司 | 一种具有保护装置的检查床 |
| US9381645B1 (en) * | 2014-12-08 | 2016-07-05 | Amazon Technologies, Inc. | System for automating manipulation of items |
-
2013
- 2013-10-25 US US14/439,345 patent/US9851708B2/en active Active
- 2013-10-25 WO PCT/IB2013/059660 patent/WO2014072869A1/en active Application Filing
- 2013-10-25 RU RU2015121365A patent/RU2015121365A/ru not_active Application Discontinuation
- 2013-10-25 BR BR112015009951A patent/BR112015009951A2/pt not_active IP Right Cessation
- 2013-10-25 JP JP2015540245A patent/JP6333835B2/ja active Active
- 2013-10-25 EP EP13824520.4A patent/EP2916736B1/en active Active
- 2013-10-25 CN CN201380058006.8A patent/CN104768466B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20150277420A1 (en) | 2015-10-01 |
| JP2015535190A (ja) | 2015-12-10 |
| RU2015121365A (ru) | 2016-12-27 |
| BR112015009951A2 (pt) | 2017-07-11 |
| WO2014072869A1 (en) | 2014-05-15 |
| CN104768466A (zh) | 2015-07-08 |
| EP2916736B1 (en) | 2021-01-13 |
| US9851708B2 (en) | 2017-12-26 |
| EP2916736A1 (en) | 2015-09-16 |
| CN104768466B (zh) | 2019-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6333835B2 (ja) | 機器を移動させるためのセンサ | |
| JP2015535190A5 (ja) | ||
| US11246777B2 (en) | Haptic systems and methods for a user interface of a patient support apparatus | |
| US9285878B2 (en) | Shear tactile display system for communicating direction and other tactile cues | |
| US9240110B2 (en) | Haptic footswitch treadle | |
| US20140379130A1 (en) | Movable medical apparatus and method for controlling movement of the same | |
| EP3220236A1 (en) | Electrostatic adhesive based haptic output device | |
| KR20080048837A (ko) | 촉각 피드백을 출력하는 장치 및 방법 | |
| TW201229854A (en) | User interface with haptic feedback | |
| ES2381869T3 (es) | Dispositivo de conmutación para aparatos médicos o quirúrgicos | |
| US10980687B2 (en) | Techniques for generating auditory and haptic output with a vibrational panel of a patient support apparatus | |
| US20150173725A1 (en) | Motion-Sensing Footswitch and Methods for a Surgical System | |
| JP6739544B2 (ja) | 医療システムとその制御方法 | |
| CN111065351A (zh) | 用于装置的安全操作的系统和方法 | |
| CA2625748A1 (en) | Interface device | |
| US9713561B2 (en) | Apparatus and methods for orienting or moving surfaces | |
| US20160124511A1 (en) | Vehicle operating device | |
| CN109661640B (zh) | 交互式计算机系统的3d触觉 | |
| Yoo et al. | Position controlled pneumatic tactile display for tangential stimulation of a finger pad | |
| JP2014056337A (ja) | 触覚提示装置 | |
| US20100214221A1 (en) | Mouse | |
| JP2010033560A (ja) | 感覚提示装置 | |
| Sakaki et al. | Robotic stretcher for sma patient: Preliminary tests on controllability and safety | |
| US11934594B2 (en) | Systems and methods of device control with operator and motion sensing | |
| KR102102386B1 (ko) | 수술용 로봇의 마스터 콘솔 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161018 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161018 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170801 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171025 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180425 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6333835 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |