JP6285880B2 - ポンプ装置 - Google Patents
ポンプ装置 Download PDFInfo
- Publication number
- JP6285880B2 JP6285880B2 JP2015019841A JP2015019841A JP6285880B2 JP 6285880 B2 JP6285880 B2 JP 6285880B2 JP 2015019841 A JP2015019841 A JP 2015019841A JP 2015019841 A JP2015019841 A JP 2015019841A JP 6285880 B2 JP6285880 B2 JP 6285880B2
- Authority
- JP
- Japan
- Prior art keywords
- nozzle
- pump
- discharge
- control
- pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012530 fluid Substances 0.000 claims description 44
- 230000001360 synchronised effect Effects 0.000 claims description 35
- 238000006073 displacement reaction Methods 0.000 claims description 25
- 238000006243 chemical reaction Methods 0.000 claims description 5
- 238000005406 washing Methods 0.000 claims description 4
- 238000007599 discharging Methods 0.000 claims 1
- 238000005086 pumping Methods 0.000 claims 1
- 238000004140 cleaning Methods 0.000 description 24
- 238000012546 transfer Methods 0.000 description 16
- 230000004044 response Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 7
- 230000001276 controlling effect Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 6
- 230000010354 integration Effects 0.000 description 6
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 239000011148 porous material Substances 0.000 description 3
- 230000001052 transient effect Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000004069 differentiation Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 208000033748 Device issues Diseases 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 239000007864 aqueous solution Substances 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000012459 cleaning agent Substances 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000011086 high cleaning Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000003112 inhibitor Substances 0.000 description 1
- JEIPFZHSYJVQDO-UHFFFAOYSA-N iron(III) oxide Inorganic materials O=[Fe]O[Fe]=O JEIPFZHSYJVQDO-UHFFFAOYSA-N 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 238000006116 polymerization reaction Methods 0.000 description 1
- 239000003755 preservative agent Substances 0.000 description 1
- 230000002335 preservative effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/03—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B1/00—Nozzles, spray heads or other outlets, with or without auxiliary devices such as valves, heating means
- B05B1/14—Nozzles, spray heads or other outlets, with or without auxiliary devices such as valves, heating means with multiple outlet openings; with strainers in or outside the outlet opening
- B05B1/16—Nozzles, spray heads or other outlets, with or without auxiliary devices such as valves, heating means with multiple outlet openings; with strainers in or outside the outlet opening having selectively- effective outlets
- B05B1/1627—Nozzles, spray heads or other outlets, with or without auxiliary devices such as valves, heating means with multiple outlet openings; with strainers in or outside the outlet opening having selectively- effective outlets with a selecting mechanism comprising a gate valve, a sliding valve or a cock
- B05B1/1636—Nozzles, spray heads or other outlets, with or without auxiliary devices such as valves, heating means with multiple outlet openings; with strainers in or outside the outlet opening having selectively- effective outlets with a selecting mechanism comprising a gate valve, a sliding valve or a cock by relative rotative movement of the valve elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B15/00—Details of spraying plant or spraying apparatus not otherwise provided for; Accessories
- B05B15/50—Arrangements for cleaning; Arrangements for preventing deposits, drying-out or blockage; Arrangements for detecting improper discharge caused by the presence of foreign matter
- B05B15/58—Arrangements for cleaning; Arrangements for preventing deposits, drying-out or blockage; Arrangements for detecting improper discharge caused by the presence of foreign matter preventing deposits, drying-out or blockage by recirculating the fluid to be sprayed from upstream of the discharge opening back to the supplying means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/02—Cleaning by the force of jets or sprays
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B23/00—Pumping installations or systems
- F04B23/02—Pumping installations or systems having reservoirs
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/08—Regulating by delivery pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/10—Other safety measures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C14/00—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations
- F04C14/08—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations characterised by varying the rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C14/00—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations
- F04C14/28—Safety arrangements; Monitoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B9/00—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour
- B05B9/03—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material
- B05B9/04—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material with pressurised or compressible container; with pump
- B05B9/0403—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material with pressurised or compressible container; with pump with pumps for liquids or other fluent material
- B05B9/0413—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material with pressurised or compressible container; with pump with pumps for liquids or other fluent material with reciprocating pumps, e.g. membrane pump, piston pump, bellow pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0209—Rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2205/00—Fluid parameters
- F04B2205/05—Pressure after the pump outlet
Description
第一には、本発明は、複数のノズルの中から選択されたノズルから噴射するポンプ装置の吐出し圧力又は吐出し流量を、選択されたノズル毎に設定した値に保つことを課題とする。
第二には、本発明は、ノズルの摩耗状況を確認し、ノズル交換の適期を報知することを課題とする。
上記構成によれば、吐出し特性をフィードバックしてポンプの回転速度を制御し、ポンプの吐出し圧力又は吐出し流量をノズル毎に設定された目標値に一致させることができる。
上記構成によれば、排出弁が開弁するとき、又は選択装置によるノズルの選択がないときに、容積式ポンプが揚圧した流体を排出弁から排出し、その間における容積式ポンプの回転速度をアイドリング回転速度にする。このアイドリング回転速度として、ノズルを選択したときの回転速度より低い回転速度を選択しておけば、ノズルから流体を噴出しないときのポンプの消費電力を低減できる。
上記構成によれば、簡便な構成で応答性の良いフィードバック制御を実現できる。
上記構成によれば、永久磁石型同期電動機は、電源の周波数に対して回転速度の追従性が良いため、より応答性の高いポンプ装置を得ることができる。また、永久磁石型同期電動機は、エネルギ効率が高いため、より機械効率の高いポンプ装置を得ることができる。
上記構成によれば、ノズルの摩耗量に応じて適宜警告を発し、又はノズルの交換を促すことができる。すなわち、ノズルの摩耗状況を確認し、ノズル交換の適期を報知することができる。ここで、警告装置は、警報発生器、警報表示装置、外部への警報信号発振器その他の警告手段を備える装置をいう。
上記構成によれば、流体の噴出に伴ってノズルが摩耗し、徐々にノズルの孔径が拡大するところ、ユーザは現在のノズルの孔径の推定値を確認することができる。すなわち、ノズルの摩耗状況を確認し、ノズル交換の適期を報知することができる。そのため、ユーザは、ノズルを交換する計画を予め策定し、洗浄等の作業品質の低下を予防することができる。
上記構成によれば、フィードフォワード制御は、操作初期での吐出し特性の応答遅れの解消を行う。また、フィードフォワード制御は、例えば容積式ポンプの起動時や使用するノズルの切替え時における過渡状態において、吐出し特性を目標値に一致させるように補償する。
上記構成によれば、例えば数値制御プログラムにプログラムされた洗浄の順序に応じて、目標値を適宜変更した場合においても、追従性の良い吐出し特性の調整が可能である。
上記構成によれば、選択装置の各出口に接続するノズルの種別や孔径を変更した場合であっても、ノズルの種別、ノズルの基準孔径、目標値を設定するだけで制御可能なポンプ装置を提供することができる。
(構成)
図1は、本発明の実施形態のポンプ装置10を示す。
図1に示すように、ポンプ装置10は、流体Fを加圧し、複数のノズル27の中から選択されたノズル27から噴出する。流体Fはタンク装置11に貯留されている。ここで、流体Fは水又は洗浄剤、防腐剤、防錆剤その他の添加物を含む水溶液である。タンク装置11は2槽式のろ過装置を備えたタンク装置である。タンク装置11は洗浄機、切削装置に慣用されているため、その詳細な説明を省略する。
なお、洗浄弁24は、設置されることが望ましいが、必ずしも必須ではない。
また、インバータ17が圧力POUTの入力に応じて周波数fを出力することに替えて、制御装置43のCPU45は、圧力POUTを一旦電流値iに変換し、インバータ17は電流値iの入力に応じて周波数fを出力できる。
列64の特定の文字(例えばx)の入力に替えて、ツール番号nに対してノズル27が取り付けられているかどうかを示す列を別途設けても良い。このとき、その列には、例えば、ノズル27が取り付けられている場合には1が、ノズル27が取り付けられていない場合には0が入力される。
更に、列69、列61、又は列63を適宜省いても良い。列63が設けられている場合、警告装置47は、換算孔径dに基づいて警告を発することができるため、周波数fの正常範囲を規定する列61、69は不要である。また、ノズル27の孔は使用に従って拡大するため、周波数fはそれに伴い上昇する。このため、列61は通常の場合省いても良い。また、周波数fに対して警告を発しない構成とする場合、列61、列69は設けることを要しない。
なお、ポンプ装置10が洗浄弁24を備えている場合、ステップS2は、洗浄弁24が開弁しているか否かの判断に置換えても良い。
ここで、ポンプ装置10が洗浄弁24を備えている場合、制御装置43のCPU45は、洗浄弁24の閉弁に先立って、排出弁22を開弁する。
ステップS4において、選択したツール番号nにノズルが設けられていないと判断された場合も(S4でNo)、CPU45は、同様にステップS12を実行する。
また、ポンプ装置10に備えられる容積式ポンプはピストンポンプ13であり、ピストンポンプ13を駆動する駆動装置は永久磁石型同期電動機16である。
本実施形態のポンプ装置10は、ノズル27が使用に伴い摩耗した場合にも、ノズル27の摩耗量に関わらず、吐出し圧力Pを一定に保つことができる。フィードバック制御にPID制御を利用するため、ピストンポンプ13の吐出し圧力Pが目標圧力P0に収束する時間が短くなる効果を有する。そして、PID制御を使用するため、複雑系であり関数化が困難なポンプ装置10の圧力応答に対して、簡便で収束性の高いフィードバック制御が可能となる。
本変形例は、ツール番号nに取付けられるノズルの種類、ノズルの基準孔径d0が決まっている点で前記した実施形態と同様であるが、その圧力を洗浄プログラム中で自由に変更できる場合の制御パラメータの構成を提供する点で前記した実施形態と相違する。
このように構成すれば、ノズル毎の目標圧力P0は、入力装置46又は入力ポート49からの入力に替えて、数値制御装置の数値制御プログラムからの入力が利用できる。ノズル27毎の制御パラメータ、及び正常周波数範囲を備えているため、ツール番号nに対して適切なパラメータが採択できる。ツール番号nに設けられているノズル27が定められている場合には、そのノズル27毎に、目標圧力P0に応じた制御パラメータを選択できるため、応答性の高い圧力制御を得ることができる。したがって、数値制御プログラムにプログラムされた洗浄の順序に応じて、目標圧力P0を適宜変更した場合においても、追従性の良い圧力調整が可能である。制御方法等は前述の実施形態と同じであるため、その詳細な説明を省略する。
第2変形例では、制御パラメータは、ノズル27の種別、ノズル27の基準孔径d0、及び目標圧力P0に基づいて取得されて、記憶装置51に記憶される。
第2変形例は、ツール番号nに対して、ノズル27の種別や孔径を変更した場合にも、ノズル27の種別、ノズル27の基準孔径d0、目標圧力P0を設定するだけで制御可能なポンプ装置10を提供する。なお、上記の実施形態と同一の構成については、同一の符号を付し、詳細な説明を省略する。
13 ピストンポンプ(容積式ポンプ)
15 吐出し口
16 永久磁石型同期電動機(駆動装置)
17 インバータ(周波数変換装置)
18 出口
19 吐出し配管
21 圧力センサ
22 排出弁
25 タレット装置(選択装置)
26 入口
27 ノズル
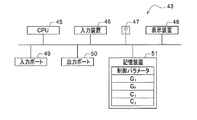
43 制御装置
45 CPU(制御部)
47 警告装置
48 表示装置
51 記憶装置
F 流体
d 換算孔径
f 周波数
n ノズル番号
P 吐出し圧力
KP 比例係数
TI 積分時間
TD 微分時間
Claims (9)
- 流体を加圧し、複数のノズルの中から選択された前記ノズルから噴出するポンプ装置であって、
前記流体を吐き出す吐出し口を有する容積式ポンプと、
前記容積式ポンプを駆動する回転速度可変の駆動装置と、
前記流体の入口と複数の出口とを有し前記入口と複数の前記出口のうちのいずれか一つとを連通させる選択装置と、
前記吐出し口と前記入口とを連通する吐出し配管と、
前記出口に連通する前記ノズルと、
前記駆動装置の前記回転速度を制御する制御部と、
前記回転速度の制御に用いられる制御パラメータ、及び前記容積式ポンプの吐出し圧力又は吐出し流量である吐出し特性の目標値を、複数の前記ノズルの各々に対応して記憶する記憶装置と、
前記吐出し配管に備えられ、前記容積式ポンプの前記吐出し特性を計測するセンサと、を備え、
前記制御部は、前記選択装置によって選択された前記ノズルに対応する前記制御パラメータを用いて、前記吐出し特性が前記目標値に一致するように前記吐出し特性をフィードバックして前記駆動装置の前記回転速度を制御することを特徴とするポンプ装置。 - 請求項1に記載のポンプ装置であって、
前記吐出し配管から分岐する配管に設けられる排出弁を備え、
前記制御部は、前記排出弁が開弁するとき、又は前記選択装置による前記ノズルの選択がないときに、前記駆動装置の前記回転速度を予め設定されたアイドリング回転速度に保つことを特徴とするポンプ装置。 - 請求項1または請求項2に記載のポンプ装置であって、
前記駆動装置へ供給する交流電力の周波数を変換する周波数変換装置を備え、
前記駆動装置は交流電動機であり、
前記制御部は、前記吐出し特性と前記目標値との偏差に基づき、前記周波数変換装置が供給する前記交流電力の前記周波数をPID制御することを特徴とするポンプ装置。 - 請求項1から請求項3のいずれか一項に記載のポンプ装置であって、
前記容積式ポンプは歯車ポンプ又はピストンポンプであり、
前記駆動装置は永久磁石型同期電動機であることを特徴とするポンプ装置。 - 請求項1から請求項4のいずれか一項に記載のポンプ装置であって、
前記ノズルに関する警告を発する警告装置を備え、
前記駆動装置の前記回転速度が、前記選択装置によって選択された前記ノズルに対して予め設定された上限回転速度を超えるか又は前記上限回転速度以上のときに、前記警告装置は、前記選択装置によって選択された前記ノズルに関する前記警告を発することを特徴とするポンプ装置。 - 請求項1から請求項5のいずれか一項に記載のポンプ装置であって、
情報を表示する表示装置を備え、
前記記憶装置は、前記駆動装置の前記回転速度と前記ノズルの孔径とを関係付ける関係情報を前記ノズル毎に記憶し、
前記制御部は、前記駆動装置の前記回転速度を取得し、取得した回転速度に相当する前記ノズルの前記孔径を前記関係情報に基づいて推定し、前記表示装置に表示させることを特徴とするポンプ装置。 - 請求項1から請求項6のいずれか一項に記載のポンプ装置であって、
前記制御部は、前記吐出し特性が前記目標値に一致するように前記吐出し特性をフィードバックして前記駆動装置の前記回転速度を制御するフィードバック制御とともに、前記目標値に応じて前記駆動装置の前記回転速度を制御するフィードフォワード制御を行うことを特徴とするポンプ装置。 - 請求項1から請求項7のいずれか一項に記載のポンプ装置であって、
前記目標値は、予め設定された洗浄の順序に応じて変化することを特徴とするポンプ装置。 - 請求項1から請求項8のいずれか一項に記載のポンプ装置であって、
前記制御パラメータは、前記ノズルの種別、前記ノズルの基準孔径、及び前記目標値に基づいて取得されて、前記記憶装置に記憶されることを特徴とするポンプ装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015019841A JP6285880B2 (ja) | 2015-02-04 | 2015-02-04 | ポンプ装置 |
| US14/947,754 US10428809B2 (en) | 2015-02-04 | 2015-11-20 | Pumping system |
| CN201610048424.4A CN105840476B (zh) | 2015-02-04 | 2016-01-25 | 泵装置 |
| KR1020160009189A KR101887737B1 (ko) | 2015-02-04 | 2016-01-26 | 펌프 장치 |
| EP16153622.2A EP3054156B1 (en) | 2015-02-04 | 2016-02-01 | Pumping system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015019841A JP6285880B2 (ja) | 2015-02-04 | 2015-02-04 | ポンプ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016142216A JP2016142216A (ja) | 2016-08-08 |
| JP6285880B2 true JP6285880B2 (ja) | 2018-02-28 |
Family
ID=55527711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015019841A Active JP6285880B2 (ja) | 2015-02-04 | 2015-02-04 | ポンプ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10428809B2 (ja) |
| EP (1) | EP3054156B1 (ja) |
| JP (1) | JP6285880B2 (ja) |
| KR (1) | KR101887737B1 (ja) |
| CN (1) | CN105840476B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3936241A1 (en) | 2020-07-08 | 2022-01-12 | Sugino Machine Limited | Cleaning method and cleaning apparatus |
| US11839962B1 (en) | 2022-07-28 | 2023-12-12 | Altec Industries, Inc. | Rotary tool for remote power line operations |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3032134B1 (fr) * | 2015-02-03 | 2017-05-19 | Exel Ind | Dispositif de distribution pour un pulverisateur agricole |
| US10476416B2 (en) * | 2016-10-24 | 2019-11-12 | John Bean Technologies Corporation | Automatic air defrost system |
| CN110461485B (zh) * | 2017-03-22 | 2022-06-10 | J·巴列斯特罗斯 | 低流量流体输送系统及其低流量装置 |
| JP6900885B2 (ja) * | 2017-11-27 | 2021-07-07 | 住友金属鉱山株式会社 | 反応容器 |
| JP6487084B1 (ja) | 2018-03-07 | 2019-03-20 | 株式会社スギノマシン | ノズルの検査装置及びノズルの検査方法 |
| JP7072986B2 (ja) * | 2018-05-29 | 2022-05-23 | 株式会社ディスコ | ウォータージェット加工装置 |
| JP7013340B2 (ja) * | 2018-07-02 | 2022-01-31 | トリニティ工業株式会社 | 塗料供給システム |
| JP6875447B2 (ja) | 2019-04-15 | 2021-05-26 | 株式会社スギノマシン | ポンプ装置及びポンプの運転方法 |
| TWI704285B (zh) * | 2019-07-25 | 2020-09-11 | 陸澍華 | 控制流體系統中馬達驅動泵的方法 |
| DE102019006505A1 (de) * | 2019-09-16 | 2021-03-18 | Satisloh Ag | Hydraulikanordnung für eine Vorrichtung zum Abblocken von optischen Werkstücken, insbesondere Brillengläsern, von zugeordneten Blockstücken |
| JP7462936B2 (ja) * | 2020-06-16 | 2024-04-08 | 伸和コントロールズ株式会社 | 流量制御装置及び方法、並びにチラー |
| JP7462937B2 (ja) | 2020-06-16 | 2024-04-08 | 伸和コントロールズ株式会社 | 流量制御装置及び方法、並びにチラー |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2600428Y2 (ja) * | 1993-09-28 | 1999-10-12 | 株式会社共立 | 液体噴射装置 |
| US5535496A (en) * | 1994-02-25 | 1996-07-16 | Sugino Corporation | Machine tool with parts |
| JP2001082346A (ja) * | 1999-09-14 | 2001-03-27 | Kitz Corp | 半導体製造プロセス用純水昇圧装置 |
| JP3812879B2 (ja) * | 2000-10-16 | 2006-08-23 | 株式会社スギノマシン | ノズル切換装置 |
| JP4410816B2 (ja) * | 2007-10-02 | 2010-02-03 | 日精樹脂工業株式会社 | 射出成形機の制御装置 |
| JP5339796B2 (ja) * | 2008-07-07 | 2013-11-13 | 旭サナック株式会社 | 異常検出機能を有する液体吐出装置及びその制御装置 |
| JP5600910B2 (ja) * | 2009-08-31 | 2014-10-08 | セイコーエプソン株式会社 | 液体噴射装置及び液体噴射装置における液体噴射ヘッドのクリーニング方法 |
| CN201555716U (zh) * | 2009-11-18 | 2010-08-18 | 上海汽车集团股份有限公司 | 雨刮器试验台系统 |
| JP5476408B2 (ja) * | 2012-03-14 | 2014-04-23 | 本田技研工業株式会社 | 燃料電池システム |
| JP5807964B2 (ja) * | 2012-05-07 | 2015-11-10 | 富士フイルム株式会社 | 画像記録装置及び方法 |
| DE102012224228A1 (de) * | 2012-12-21 | 2014-06-26 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Nassbeschichtung eines Substrats |
-
2015
- 2015-02-04 JP JP2015019841A patent/JP6285880B2/ja active Active
- 2015-11-20 US US14/947,754 patent/US10428809B2/en active Active
-
2016
- 2016-01-25 CN CN201610048424.4A patent/CN105840476B/zh active Active
- 2016-01-26 KR KR1020160009189A patent/KR101887737B1/ko active IP Right Grant
- 2016-02-01 EP EP16153622.2A patent/EP3054156B1/en active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3936241A1 (en) | 2020-07-08 | 2022-01-12 | Sugino Machine Limited | Cleaning method and cleaning apparatus |
| US11465184B2 (en) | 2020-07-08 | 2022-10-11 | Sugino Machine Limited | Cleaning method and cleaning apparatus |
| US11839962B1 (en) | 2022-07-28 | 2023-12-12 | Altec Industries, Inc. | Rotary tool for remote power line operations |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3054156A1 (en) | 2016-08-10 |
| JP2016142216A (ja) | 2016-08-08 |
| EP3054156B1 (en) | 2017-11-22 |
| KR20160096016A (ko) | 2016-08-12 |
| US20160222950A1 (en) | 2016-08-04 |
| KR101887737B1 (ko) | 2018-08-10 |
| CN105840476B (zh) | 2018-06-26 |
| CN105840476A (zh) | 2016-08-10 |
| US10428809B2 (en) | 2019-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6285880B2 (ja) | ポンプ装置 | |
| CA2620668C (en) | Procedure for controlling a dosing device for liquid or pasty media | |
| JP6937824B2 (ja) | アクティブ式接着剤再循環制御用のシステム及び方法 | |
| JP5419556B2 (ja) | 高粘性材料の定量吐出装置および方法 | |
| US9566681B2 (en) | Coolant supply device and supply method | |
| EP3829812A1 (en) | Minimum quantity lubrication system and method | |
| JP2013253674A (ja) | 流体圧ユニット | |
| DK3012075T3 (en) | Method for operating a facility for waterjet cutting and facility for water jet cutting | |
| CN103635689B (zh) | 液压单元 | |
| JP2004308736A (ja) | 液圧装置及びその制御方法 | |
| EP2898973A2 (en) | Working fluid supply control apparatus for a wire electric discharge machine | |
| JP7285173B2 (ja) | 定圧液供給装置 | |
| KR20140087807A (ko) | 에너지 절감형 절삭유 공급 장치 및 방법 | |
| CN101356373B (zh) | 用于泵中的机械活塞的位置控制的系统 | |
| TWI730404B (zh) | 定壓液體供給裝置 | |
| CN109421383A (zh) | 液体材料吐出装置及液体材料吐出方法 | |
| JP5492459B2 (ja) | 配水網内における圧力制御装置及び圧力制御方法 | |
| JP6782030B1 (ja) | 工作液供給システム | |
| RU2728770C2 (ru) | Способ регулирования режима работы дожимной насосной станции | |
| CN211840079U (zh) | 一种自动化激水装置 | |
| CN116197827A (zh) | 一种超声空化辅助磨料射流加工系统及方法 | |
| TW202410995A (zh) | 放電加工機及放電加工方法 | |
| CN117655434A (zh) | 放电加工机及放电加工方法 | |
| JP4515779B2 (ja) | 超高圧水発生装置およびその制御方法 | |
| JP2019157768A (ja) | 定圧液供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6285880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |