JP6274100B2 - 搬送波再生装置および搬送波再生方法 - Google Patents
搬送波再生装置および搬送波再生方法 Download PDFInfo
- Publication number
- JP6274100B2 JP6274100B2 JP2014512602A JP2014512602A JP6274100B2 JP 6274100 B2 JP6274100 B2 JP 6274100B2 JP 2014512602 A JP2014512602 A JP 2014512602A JP 2014512602 A JP2014512602 A JP 2014512602A JP 6274100 B2 JP6274100 B2 JP 6274100B2
- Authority
- JP
- Japan
- Prior art keywords
- symbol
- phase
- output symbol
- output
- error
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 47
- 238000012937 correction Methods 0.000 claims description 96
- 238000011084 recovery Methods 0.000 claims description 63
- 238000013507 mapping Methods 0.000 claims description 36
- 238000001514 detection method Methods 0.000 claims description 12
- 238000012935 Averaging Methods 0.000 claims description 7
- 230000004044 response Effects 0.000 claims description 6
- 230000005540 biological transmission Effects 0.000 description 51
- 238000010586 diagram Methods 0.000 description 22
- 238000012545 processing Methods 0.000 description 19
- 230000008569 process Effects 0.000 description 13
- 230000001172 regenerating effect Effects 0.000 description 13
- 238000004891 communication Methods 0.000 description 7
- 230000001186 cumulative effect Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 3
- 230000001934 delay Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L1/00—Arrangements for detecting or preventing errors in the information received
- H04L1/0001—Systems modifying transmission characteristics according to link quality, e.g. power backoff
- H04L1/0036—Systems modifying transmission characteristics according to link quality, e.g. power backoff arrangements specific to the receiver
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/0014—Carrier regulation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L1/00—Arrangements for detecting or preventing errors in the information received
- H04L1/004—Arrangements for detecting or preventing errors in the information received by using forward error control
- H04L1/0045—Arrangements at the receiver end
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/18—Phase-modulated carrier systems, i.e. using phase-shift keying
- H04L27/22—Demodulator circuits; Receiver circuits
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/32—Carrier systems characterised by combinations of two or more of the types covered by groups H04L27/02, H04L27/10, H04L27/18 or H04L27/26
- H04L27/34—Amplitude- and phase-modulated carrier systems, e.g. quadrature-amplitude modulated carrier systems
- H04L27/38—Demodulator circuits; Receiver circuits
- H04L27/3818—Demodulator circuits; Receiver circuits using coherent demodulation, i.e. using one or more nominally phase synchronous carriers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/32—Carrier systems characterised by combinations of two or more of the types covered by groups H04L27/02, H04L27/10, H04L27/18 or H04L27/26
- H04L27/34—Amplitude- and phase-modulated carrier systems, e.g. quadrature-amplitude modulated carrier systems
- H04L27/38—Demodulator circuits; Receiver circuits
- H04L27/3818—Demodulator circuits; Receiver circuits using coherent demodulation, i.e. using one or more nominally phase synchronous carriers
- H04L27/3836—Demodulator circuits; Receiver circuits using coherent demodulation, i.e. using one or more nominally phase synchronous carriers in which the carrier is recovered using the received modulated signal or the received IF signal, e.g. by detecting a pilot or by frequency multiplication
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/0014—Carrier regulation
- H04L2027/0024—Carrier regulation at the receiver end
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/0014—Carrier regulation
- H04L2027/0044—Control loops for carrier regulation
- H04L2027/0046—Open loops
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/0014—Carrier regulation
- H04L2027/0044—Control loops for carrier regulation
- H04L2027/0053—Closed loops
- H04L2027/0061—Closed loops remodulation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/0014—Carrier regulation
- H04L2027/0044—Control loops for carrier regulation
- H04L2027/0063—Elements of loops
- H04L2027/0067—Phase error detectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L27/00—Modulated-carrier systems
- H04L27/0014—Carrier regulation
- H04L2027/0083—Signalling arrangements
- H04L2027/0087—Out-of-band signals, (e.g. pilots)
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Quality & Reliability (AREA)
- Digital Transmission Methods That Use Modulated Carrier Waves (AREA)
- Error Detection And Correction (AREA)
Description
本発明は、日本国特許出願:特願2012−099167号(2012年 4月24日出願)の優先権主張に基づくものであり、同出願の全記載内容は引用をもって本書に組み込み記載されているものとする。
本発明は、搬送波再生装置および搬送波再生方法に関し、特に、誤り訂正を含む多値伝送のための復調装置に対して好適に適用し得る搬送波再生装置および搬送波再生方法に関する。
受信シンボルに含まれるパイロットシンボルに基づいて前記受信シンボルの位相誤差を推定する補間フィルタと、
前記補間フィルタにより推定された位相誤差に応じて前記受信シンボルの位相を回転して第1の出力シンボルとして出力する第1の位相回転器と、
前記第1の出力シンボルに残留する位相誤差を補償して第2の出力シンボルとして出力する位相誤差補償部と、
前記第1の出力シンボルに対応する第1のビット列を算出するとともに前記第2の出力シンボルに対応する第2のビット列を算出するQAMシンボルデマッピング部と、
前記第1のビット列におけるビットエラーを誤り訂正して出力する誤り訂正復号器と、を備え、
前記位相誤差補償部は、前記誤り訂正後の前記第1のビット列を参照して前記第1の出力シンボルに残留する位相誤差を補償する。
受信シンボルに含まれるパイロットシンボルに基づいて前記受信シンボルの位相誤差を推定する工程と、
推定した位相誤差に応じて前記受信シンボルの位相を回転して第1の出力シンボルとする工程と、
前記第1の出力シンボルに対応する第1のビット列を算出する工程と、
前記第1のビット列におけるビットエラーを誤り訂正する工程と、
前記誤り訂正後の第1のビット列を参照して前記第1の出力シンボルに残留する位相誤差を補償して第2の出力シンボルとする工程と、
前記第2の出力シンボルに対応する第2のビット列を算出する工程と、
前記第2のビット列におけるビットエラーを誤り訂正する工程と、を含む。
[形態1]
上記第1の視点に係る搬送波再生装置のとおりである。
[形態2]
搬送波再生装置は、前記第1の位相回転器から出力された前記第1の出力シンボルを一時的に保持するバッファを備え、
前記位相誤差補償部は、前記バッファから出力された前記第1の出力シンボルの位相を回転して前記第2の出力シンボルを生成する第2の位相回転器を備えていてもよい。
[形態3]
前記位相誤差補償部は、前記誤り訂正後のビット列に応じたシンボルを第3の出力シンボルとして生成するQAMシンボルマッピング部を備えていてもよい。
[形態4]
前記位相誤差補償部は、前記第1の出力シンボルおよび前記第2の出力シンボルの少なくともいずれか一方と前記第3の出力シンボルとの位相差を検出して、前記第1の出力シンボルに残留する位相誤差を補償してもよい。
[形態5]
前記位相誤差補償部は、前記第2の出力シンボルと前記第3の出力シンボルとの位相差を検出する位相誤差検出器と、
前記位相差に含まれる高周波成分を除去した後の前記位相差に基づいて位相回転量を算出する数値制御発振器と、を備え、
前記第2の位相回転器は、前記バッファから出力された前記第1の出力シンボルの位相を前記位相回転量に応じて回転して前記第2の出力シンボルを生成してもよい。
[形態6]
前記位相誤差補償部は、前記位相差に含まれる高周波成分を除去して前記数値制御発振器に出力するループフィルタを備えていてもよい。
[形態7]
前記位相誤差補償部は、前記第1の出力シンボルと前記第3の出力シンボルとの位相差を検出する位相誤差検出器と、
前記位相差を平均化して位相回転量を算出するローパスフィルタと、を備え、
前記第2の位相回転器は、前記バッファから出力された前記第1の出力シンボルの位相を前記位相回転量に応じて回転して前記第2の出力シンボルを生成してもよい。
[形態8]
前記補間フィルタは、前記パイロットシンボルを保持する複数のレジスタと、
前記複数のレジスタと同数の複数の乗算器と、
前記複数のレジスタと同数の複数の加算器と、を備えた有限インパルスレスポンス型フィルタであってもよい。
[形態9]
前記補間フィルタは、位相雑音レベルおよび搬送波対雑音比に応じてタップ係数の初期値および前記タップ係数の更新時のステップ幅を決定するとともに、前記受信シンボルに含まれる前記パイロットシンボルの間隔と同一の回数だけ前記タップ係数を更新してもよい。
[形態10]
準同期検波方式に基づく復調装置は、上記搬送波再生装置を備えていてもよい。
[形態11]
上記第2の視点に係る搬送波再生方法のとおりである。
[形態12]
搬送波再生方法は、前記誤り訂正後の第nのビット列(nは自然数)を参照して前記第nの出力シンボルに残留する位相誤差を補償して第(n+1)の出力シンボルとする工程と、
前記第(n+1)の出力シンボルに対応する第(n+1)のビット列を算出する工程と、
前記第(n+1)のビット列におけるビットエラーを誤り訂正する工程とを、
nをインクリメントしつつnが所定の数となるまで、または、誤り訂正においてすべてのエラーが訂正されるまで繰り返してもよい。
[形態13]
既知のパイロット信号を含むデータ信号を復調する準同期検波復調回路における搬送波再生装置は、
受信パイロットシンボルから、該受信パイロットシンボルを含むすべての受信シンボルに対する位相誤差を推定する補間フィルタと、
前記補間フィルタによって推定した位相誤差分の位相回転を、前記受信シンボルに施すことにより位相誤差を補正する第1の位相回転器と、
前記第1の位相回転器の出力シンボルに残留する残留位相誤差を補償する位相誤差補償部と、
前記位相誤差補償部がリファレンスとして入力するデータを生成する誤り訂正復号器と、
前記位相誤差補償部の出力および前記第1の位相回転器の出力シンボルを、前記誤り訂正復号器への入力ビット列へ変換するQAMシンボルデマッピング部と、を備え、
前記補間フィルタおよび前記位相誤差補償部による2段階の位相誤差補償を行うことが好ましい。
[形態14]
搬送波再生装置は、前記第1の位相回転器の出力を一時的に保持するバッファを備えていてもよい。
[形態15]
前記位相誤差補償部は、前記バッファの出力シンボルの位相を回転する第2の位相回転器と、
前記誤り訂正復号器の出力データから該出力データに対応する送信シンボル系列のレプリカを生成するQAMシンボルマッピング部と、
前記第2の位相回転器の出力シンボルと、前記レプリカとの間の位相差を検出する位相誤差検出器と、
前記位相誤差検出器の出力に含まれる高周波成分を除去するためのループフィルタと、
前記ループフィルタの出力から位相回転量を算出する数値制御発振器と、を備え、
前記位相誤差検出器、前記ループフィルタおよび前記数値制御発振器とともに環状に結線された前記第2の位相回転器によって、2段階目の位相誤差補償を行うようにしてもよい。
[形態16]
前記位相誤差補償部は、前記バッファの出力シンボルの位相を回転する第2の位相回転器と、
前記誤り訂正復号器の出力データから該出力データに対応する送信シンボル系列のレプリカを生成するQAMシンボルマッピング部と、
前記バッファの出力シンボルと前記レプリカとの間の位相差を検出する位相誤差検出器と、
前記位相誤差検出器の出力値を平均化するためのローパスフィルタと、を備え、
前記ローパスフィルタの出力を用いて、前記第2の位相回転器で前記バッファの出力シンボルの位相を回転し、2段階目の位相誤差補償を行うようにしてもよい。
[形態17]
前記補間フィルタは、前記パイロットシンボルのみを入力として一定数の受信パイロットシンボルを保持するレジスタと、該レジスタと同数の乗算器および累積加算装置を備えた有限インパルスレスポンス(Finite Impulse Response;FIR)型フィルタであり、
前記補間フィルタのタップ係数を、前記累積加算装置によって、受信パイロットシンボル間隔と同一の回数更新してもよい。
[形態18]
既知のパイロット信号を含むデータ信号を復調する準同期検波復調方式における搬送波再生方法は、
受信パイロットシンボルから、補間によって該受信パイロットシンボルを含むすべての受信シンボルに対して位相誤差を推定する補間処理を行う補間処理工程と、
前記推定した位相誤差分の補正を行う第1回目の位相誤差補償工程と、
前記位相誤差補償を行った受信シンボルをビット列にデマッピングする工程と、
前記デマッピングされたビット列を誤り訂正処理する工程と、
位相誤差補償を行った回数が予め設定した回数より小さい場合に、2回目以降の位相誤差補償を行う工程と、を含み、
前記2回目以降の位相誤差補償は、前記誤り訂正処理後のデータをリファレンスとして使用し、
前記位相誤差補償を行った回数が予め設定した回数に達する、または、前記誤り訂正処理がすべてのエラーを訂正するまで、前記2回目以降の位相誤差補償工程、前記デマッピング工程、および、前記誤り訂正処理工程を繰り返すことが好ましい。
[形態19]
前記2回目以降の位相誤差補償工程は、誤り訂正処理されたデータをQAMシンボルにマッピングすることで送信シンボル系列のレプリカを生成する工程と、
前記レプリカをリファレンスとして位相誤差を検出する工程と、
前記位相誤差に含まれる高周波成分を除去する工程と、
前記高周波成分が除去された位相誤差情報を変換して位相回転情報を生成する工程と、
前記位相回転情報によって位相誤差補償を行う工程と、を含み、
前記位相誤差補償を行った受信シンボルを、前記位相誤差を検出する工程にフィードバックして位相誤差を検出するようにしてもよい。
[形態20]
前記2回目以降の位相誤差補償工程は、誤り訂正処理されたデータをQAMシンボルにマッピングすることで送信シンボルレプリカを生成する工程と、
前記送信シンボルレプリカをリファレンスとして位相誤差を検出する工程と、
前記検出された位相誤差を、ローパスフィルタを通して平均化して位相回転信号を生成する工程と、を含み、
前記位相回転信号に基づいて位相誤差補償を行うようにしてもよい。
[形態21]
前記補間処理工程は、タップ係数の初期値をセットする工程と、
積和演算処理を実行する工程と、
累積加算によって前記タップ係数を更新する2種類のタップ係数更新工程と、を含み、
前記積和演算処理工程および前記タップ係数更新工程を前記受信パイロットシンボル間隔と同一の回数繰り返してもよい。
第1の実施形態に係る搬送波再生装置について、図面を参照して説明する。図1は、本実施形態に係る搬送波再生装置10を備えた復調装置20の構成を一例として示すブロック図である。

第2の実施形態に係る搬送波再生装置について、図面を参照して説明する。図7は、本実施形態に係る搬送波再生装置10aを備えた復調装置20a構成を一例として示すブロック図である。
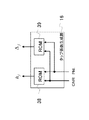
第3の実施形態に係る搬送波再生装置について、図面を参照して説明する。図11は、本実施形態に係る搬送波再生装置10bを備えた復調装置20bの構成を一例として示すブロック図である。
11、121、131 基準発振器
12、122、132 検波器
13、123、133 A/D変換器
14、134 遅延回路
15、135 補間フィルタ
16 タップ係数生成部
17、55、61、124、136 位相回転器
18 バッファ
19、19a、19b 位相誤差補償部
20、20a、20b 復調装置
30、42、45 セレクタ
31、128、137 QAMシンボルデマッピング部
32、129、138 誤り訂正復号器
34、46、47 加算器
35、41、44 レジスタ
36、38、39、66 ROM(リードオンリーメモリ)テーブル
43、91 乗算器
51、62 QAMシンボルマッピング部
52、63 位相誤差検出器(参照信号入力付き)
53、126 ループフィルタ
54、127 数値制御発振器
64 ローパスフィルタ
65 平均化フィルタ
125 位相誤差検出器
Claims (9)
- 受信シンボルに含まれるパイロットシンボルに基づいて前記受信シンボルの位相誤差を推定する補間フィルタと、
前記補間フィルタにより推定された位相誤差に応じて前記受信シンボルの位相を回転して第1の出力シンボルとして出力する第1の位相回転器と、
前記第1の出力シンボルに残留する位相誤差を補償して第2の出力シンボルとして出力する位相誤差補償部と、
前記第1の出力シンボルに対応する第1のビット列を算出するとともに前記第2の出力シンボルに対応する第2のビット列を算出するQAMシンボルデマッピング部と、
前記第1のビット列におけるビットエラーを誤り訂正して出力する誤り訂正復号器と、
を備え、
前記位相誤差補償部は、前記誤り訂正後の前記第1のビット列を参照して前記第1の出力シンボルに残留する位相誤差を補償し、
前記第1の位相回転器から出力された前記第1の出力シンボルを一時的に保持するバッファを備え、
前記位相誤差補償部は、前記バッファから出力された前記第1の出力シンボルの位相を回転して前記第2の出力シンボルを生成する第2の位相回転器を備え、
前記位相誤差補償部は、前記誤り訂正後のビット列に応じたシンボルを第3の出力シンボルとして生成するQAMシンボルマッピング部を備え、
前記位相誤差補償部は、前記第1の出力シンボルおよび前記第2の出力シンボルの少なくともいずれか一方と前記第3の出力シンボルとの位相差を検出して、前記第1の出力シンボルに残留する位相誤差を補償し、
前記位相誤差補償部は、前記第2の出力シンボルと前記第3の出力シンボルとの位相差を検出する位相誤差検出器と、
前記位相差に含まれる高周波成分を除去した後の前記位相差に基づいて位相回転量を算出する数値制御発振器と、を備え、
前記第2の位相回転器は、前記バッファから出力された前記第1の出力シンボルの位相を前記位相回転量に応じて回転して前記第2の出力シンボルを生成する、搬送波再生装置。 - 前記位相誤差補償部は、前記位相差に含まれる高周波成分を除去して前記数値制御発振器に出力するループフィルタを備える、請求項1に記載の搬送波再生装置。
- 受信シンボルに含まれるパイロットシンボルに基づいて前記受信シンボルの位相誤差を推定する補間フィルタと、
前記補間フィルタにより推定された位相誤差に応じて前記受信シンボルの位相を回転して第1の出力シンボルとして出力する第1の位相回転器と、
前記第1の出力シンボルに残留する位相誤差を補償して第2の出力シンボルとして出力する位相誤差補償部と、
前記第1の出力シンボルに対応する第1のビット列を算出するとともに前記第2の出力シンボルに対応する第2のビット列を算出するQAMシンボルデマッピング部と、
前記第1のビット列におけるビットエラーを誤り訂正して出力する誤り訂正復号器と、
を備え、
前記位相誤差補償部は、前記誤り訂正後の前記第1のビット列を参照して前記第1の出力シンボルに残留する位相誤差を補償し、
前記第1の位相回転器から出力された前記第1の出力シンボルを一時的に保持するバッファを備え、
前記位相誤差補償部は、前記バッファから出力された前記第1の出力シンボルの位相を回転して前記第2の出力シンボルを生成する第2の位相回転器を備え、
前記位相誤差補償部は、前記誤り訂正後のビット列に応じたシンボルを第3の出力シンボルとして生成するQAMシンボルマッピング部を備え、
前記位相誤差補償部は、前記第1の出力シンボルおよび前記第2の出力シンボルの少なくともいずれか一方と前記第3の出力シンボルとの位相差を検出して、前記第1の出力シンボルに残留する位相誤差を補償し、
前記位相誤差補償部は、前記第1の出力シンボルと前記第3の出力シンボルとの位相差を検出する位相誤差検出器と、
前記位相差を平均化して位相回転量を算出するローパスフィルタと、を備え、
前記第2の位相回転器は、前記バッファから出力された前記第1の出力シンボルの位相を前記位相回転量に応じて回転して前記第2の出力シンボルを生成する、搬送波再生装置。 - 前記補間フィルタは、前記パイロットシンボルを保持する複数のレジスタと、
前記複数のレジスタと同数の複数の乗算器と、
前記複数のレジスタと同数の複数の加算器と、を備えた有限インパルスレスポンス型フィルタである、請求項1ないし3のいずれか1項に記載の搬送波再生装置。 - 前記補間フィルタは、位相雑音レベルおよび搬送波対雑音比に応じてタップ係数の初期値および前記タップ係数の更新時のステップ幅を決定するとともに、前記受信シンボルに含まれる前記パイロットシンボルの間隔と同一の回数だけ前記タップ係数を更新する、請求項4に記載の搬送波再生装置。
- 請求項1ないし5のいずれか1項に記載の搬送波再生装置を備える、準同期検波方式に基づく復調装置。
- 受信シンボルに含まれるパイロットシンボルに基づいて前記受信シンボルの位相誤差を推定する工程と、
推定した位相誤差に応じて前記受信シンボルの位相を回転して第1の出力シンボルとする工程と、
前記第1の出力シンボルに対応する第1のビット列を算出する工程と、
前記第1のビット列におけるビットエラーを誤り訂正する工程と、
前記誤り訂正後の第1のビット列を参照して前記第1の出力シンボルに残留する位相誤差を補償して第2の出力シンボルとする工程と、
前記第2の出力シンボルに対応する第2のビット列を算出する工程と、
前記第2のビット列におけるビットエラーを誤り訂正する工程と、を含み、
前記第2の出力シンボルとする工程は、前記第1の出力シンボルとする工程で出力された前記第1の出力シンボルを一時的に保持するバッファから出力された前記第1の出力シンボルの位相を回転して前記第2の出力シンボルを生成する工程を含み、
前記第2の出力シンボルとする工程は、前記誤り訂正後のビット列に応じたシンボルを第3の出力シンボルとして生成する工程を含み、
前記第2の出力シンボルとする工程では、前記第1の出力シンボルおよび前記第2の出力シンボルの少なくともいずれか一方と前記第3の出力シンボルとの位相差を検出して、前記第1の出力シンボルに残留する位相誤差を補償し、
前記第2の出力シンボルとする工程は、前記第2の出力シンボルと前記第3の出力シンボルとの位相差を検出する工程と、前記位相差に含まれる高周波成分を除去した後の前記位相差に基づいて位相回転量を算出する工程とを含み、
前記第2の出力シンボルを生成する工程で、前記バッファから出力された前記第1の出力シンボルの位相を前記位相回転量に応じて回転して前記第2の出力シンボルを生成する
搬送波再生方法。 - 前記誤り訂正後の第nのビット列(nは自然数)を参照して前記第nの出力シンボルに残留する位相誤差を補償して第(n+1)の出力シンボルとする工程と、
前記第(n+1)の出力シンボルに対応する第(n+1)のビット列を算出する工程と、
前記第(n+1)のビット列におけるビットエラーを誤り訂正する工程とを、
nをインクリメントしつつnが所定の数となるまで、または、誤り訂正においてすべてのエラーが訂正されるまで繰り返す、請求項7に記載の搬送波再生方法。 - 受信シンボルに含まれるパイロットシンボルに基づいて前記受信シンボルの位相誤差を推定する工程と、
推定した位相誤差に応じて前記受信シンボルの位相を回転して第1の出力シンボルとする工程と、
前記第1の出力シンボルに対応する第1のビット列を算出する工程と、
前記第1のビット列におけるビットエラーを誤り訂正する工程と、
前記誤り訂正後の第1のビット列を参照して前記第1の出力シンボルに残留する位相誤差を補償して第2の出力シンボルとする工程と、
前記第2の出力シンボルに対応する第2のビット列を算出する工程と、
前記第2のビット列におけるビットエラーを誤り訂正する工程と、を含み、
前記第2の出力シンボルとする工程は、前記第1の出力シンボルとする工程で出力された前記第1の出力シンボルを一時的に保持するバッファから出力された前記第1の出力シンボルの位相を回転して前記第2の出力シンボルを生成する工程を含み、
前記第2の出力シンボルとする工程は、前記誤り訂正後のビット列に応じたシンボルを第3の出力シンボルとして生成する工程を含み、
前記第2の出力シンボルとする工程では、前記第1の出力シンボルおよび前記第2の出力シンボルの少なくともいずれか一方と前記第3の出力シンボルとの位相差を検出して、前記第1の出力シンボルに残留する位相誤差を補償し、
前記第2の出力シンボルとする工程は、前記第1の出力シンボルと前記第3の出力シンボルとの位相差を検出する工程と、前記位相差を平均化して位相回転量を算出する工程とを含み、
前記第2の出力シンボルを生成する工程で、前記バッファから出力された前記第1の出力シンボルの位相を前記位相回転量に応じて回転して前記第2の出力シンボルを生成する
搬送波再生方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012099167 | 2012-04-24 | ||
| JP2012099167 | 2012-04-24 | ||
| PCT/JP2013/061881 WO2013161801A1 (ja) | 2012-04-24 | 2013-04-23 | 搬送波再生装置および搬送波再生方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2013161801A1 JPWO2013161801A1 (ja) | 2015-12-24 |
| JP6274100B2 true JP6274100B2 (ja) | 2018-02-07 |
Family
ID=49483111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014512602A Active JP6274100B2 (ja) | 2012-04-24 | 2013-04-23 | 搬送波再生装置および搬送波再生方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9136979B2 (ja) |
| EP (1) | EP2843896B1 (ja) |
| JP (1) | JP6274100B2 (ja) |
| CN (1) | CN104272692B (ja) |
| IN (1) | IN2014DN08872A (ja) |
| WO (1) | WO2013161801A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015107897A1 (ja) * | 2014-01-16 | 2015-07-23 | 日本電気株式会社 | 通信装置、復調装置、搬送波再生装置、位相誤差補償装置、位相誤差補償方法および位相誤差補償プログラムが記憶された記憶媒体 |
| JP6449569B2 (ja) * | 2014-06-25 | 2019-01-09 | Necプラットフォームズ株式会社 | 位相補正装置、位相補正方法、及び位相補正プログラム |
| EP3217554B1 (en) * | 2016-03-11 | 2019-10-02 | Intel IP Corporation | Apparatuses and methods for compensating phase fluctuations |
| JP6996496B2 (ja) | 2016-04-19 | 2022-01-17 | 日本電気株式会社 | Los-mimo復調装置、通信装置、los-mimo伝送システム、los-mimo復調方法及びプログラム |
| JP6939794B2 (ja) | 2016-08-17 | 2021-09-22 | 日本電気株式会社 | 位相雑音補償装置、復調装置、受信装置、通信システム、及び位相雑音補償方法 |
| JP2018064223A (ja) * | 2016-10-14 | 2018-04-19 | 住友電気工業株式会社 | 衛星放送受信装置 |
| FR3059183B1 (fr) * | 2016-11-24 | 2019-02-01 | Continental Automotive France | Demodulation optimisee des signaux rds en radio numerique |
| JP6750688B2 (ja) | 2016-12-21 | 2020-09-02 | 日本電気株式会社 | 変調方法、復号方法、変調装置および復調装置 |
| US10638109B2 (en) * | 2017-09-15 | 2020-04-28 | Elphel, Inc. | Method for the FPGA-based long range multi-view stereo with differential image rectification |
| CN109586869B (zh) * | 2017-09-29 | 2021-08-06 | 中国移动通信有限公司研究院 | Srs发送方法、相位差处理方法、通信设备及存储介质 |
| EP4005169A4 (en) * | 2019-07-29 | 2022-08-03 | Telefonaktiebolaget LM Ericsson (publ) | METHOD AND DEVICE FOR PHASE CONTROLLED ADAPTIVE MODULATION |
| US11283658B2 (en) * | 2019-10-15 | 2022-03-22 | Raytheon Company | Phase-based pre-carrier detection |
| JP7547010B2 (ja) | 2020-08-31 | 2024-09-09 | 日本無線株式会社 | 搬送波再生回路 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1167215C (zh) | 1994-06-23 | 2004-09-15 | Ntt移动通信网株式会社 | 码分多址联接解调方法 |
| JP3243776B2 (ja) * | 1995-01-06 | 2002-01-07 | 株式会社エヌ・ティ・ティ・ドコモ | 周波数ホッピング伝送方法 |
| US6618352B1 (en) * | 1998-05-26 | 2003-09-09 | Matsushita Electric Industrial Co., Ltd. | Modulator, demodulator, and transmission system for use in OFDM transmission |
| JP3646010B2 (ja) | 1998-09-18 | 2005-05-11 | 株式会社ケンウッド | デジタル衛星放送受信機 |
| US6249180B1 (en) | 1999-09-08 | 2001-06-19 | Atmel Corporation | Phase noise and additive noise estimation in a QAM demodulator |
| JP4958565B2 (ja) * | 2006-01-06 | 2012-06-20 | パナソニック株式会社 | 無線通信装置 |
| CN101449502B (zh) * | 2006-05-19 | 2012-11-07 | 松下电器产业株式会社 | 无线通信设备和无线通信方法 |
| KR100929776B1 (ko) * | 2007-11-26 | 2009-12-03 | 한국전자통신연구원 | 리커시브 복조 장치 및 방법 |
| JP5215704B2 (ja) * | 2008-03-26 | 2013-06-19 | パナソニック株式会社 | 適応復調方式 |
| KR101081983B1 (ko) | 2009-09-24 | 2011-11-10 | 한국타이어 주식회사 | 타이어 트레드 압출용 압출금형의 다중 프리포머 다이 |
| JP5578601B2 (ja) | 2009-11-05 | 2014-08-27 | 日本電気株式会社 | 搬送波再生回路、復調回路および搬送波再生方法 |
| CN102714649B (zh) | 2009-12-01 | 2015-02-18 | 日本电气株式会社 | 数据传输方法、数据接收方法、数据调制设备、数据解调设备 |
-
2013
- 2013-04-23 CN CN201380021985.XA patent/CN104272692B/zh active Active
- 2013-04-23 US US14/396,089 patent/US9136979B2/en active Active
- 2013-04-23 EP EP13780986.9A patent/EP2843896B1/en active Active
- 2013-04-23 IN IN8872DEN2014 patent/IN2014DN08872A/en unknown
- 2013-04-23 JP JP2014512602A patent/JP6274100B2/ja active Active
- 2013-04-23 WO PCT/JP2013/061881 patent/WO2013161801A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP2843896B1 (en) | 2018-04-04 |
| JPWO2013161801A1 (ja) | 2015-12-24 |
| WO2013161801A1 (ja) | 2013-10-31 |
| IN2014DN08872A (ja) | 2015-05-22 |
| EP2843896A1 (en) | 2015-03-04 |
| CN104272692A (zh) | 2015-01-07 |
| US20150085960A1 (en) | 2015-03-26 |
| US9136979B2 (en) | 2015-09-15 |
| CN104272692B (zh) | 2017-09-26 |
| EP2843896A4 (en) | 2015-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6274100B2 (ja) | 搬送波再生装置および搬送波再生方法 | |
| US9209843B2 (en) | Fine phase estimation for highly spectrally efficient communications | |
| US5245611A (en) | Method and apparatus for providing carrier frequency offset compensation in a tdma communication system | |
| US6597733B2 (en) | Equalizer performance enhancements for broadband wireless applications | |
| US7136445B2 (en) | Phase tracker for linearly modulated signal | |
| US20050207519A1 (en) | Digital radio receiver | |
| EP3096500B1 (en) | Communication apparatus, demodulation apparatus, carrier reproduction apparatus, phase error compensation apparatus, phase error compensation method, and storage medium on which phase error compensation program has been stored | |
| JP3782237B2 (ja) | Ofdm信号復調装置 | |
| WO2018034030A1 (ja) | 位相雑音補償装置、復調装置、通信装置、通信システム、及び位相雑音補償方法 | |
| CN113132285A (zh) | 一种数字解调系统及方法 | |
| US7127019B2 (en) | Methods and apparatus for implementing multi-tone receivers | |
| TW200427240A (en) | Reducing phase noise in phase-encoded communications signals | |
| US6445752B1 (en) | Apparatus and method for phase tracking in a demodulator | |
| US20030112899A1 (en) | Decision directed phase locked loops (DD-PLL) with excess processing power in digital communication systems | |
| JP4438581B2 (ja) | 復調装置及び復調方法 | |
| JP3237866B2 (ja) | 軟判定復号方法 | |
| JP2015065491A (ja) | 復調装置及び復調方法 | |
| JPH11136304A (ja) | 多値qam受信部 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6274100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |