JP6235609B2 - 変速機出力軸センサを用いて車両の推定車輪速度を監視するためのシステムおよび方法 - Google Patents
変速機出力軸センサを用いて車両の推定車輪速度を監視するためのシステムおよび方法 Download PDFInfo
- Publication number
- JP6235609B2 JP6235609B2 JP2015550449A JP2015550449A JP6235609B2 JP 6235609 B2 JP6235609 B2 JP 6235609B2 JP 2015550449 A JP2015550449 A JP 2015550449A JP 2015550449 A JP2015550449 A JP 2015550449A JP 6235609 B2 JP6235609 B2 JP 6235609B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel speed
- wheel
- deviation
- speed value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012544 monitoring process Methods 0.000 title claims description 64
- 238000000034 method Methods 0.000 title claims description 19
- 230000005540 biological transmission Effects 0.000 title claims description 10
- 238000005259 measurement Methods 0.000 claims description 4
- 230000007246 mechanism Effects 0.000 claims description 4
- 238000004481 total suppression of sideband Methods 0.000 description 22
- 238000004364 calculation method Methods 0.000 description 9
- 230000008901 benefit Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0816—Indicating performance data, e.g. occurrence of a malfunction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0182—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method involving parameter estimation, e.g. observer, Kalman filter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0185—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method for failure detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/019—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the type of sensor or the arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
- B60T8/885—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means using electrical circuitry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
- G01P21/02—Testing or calibrating of apparatus or devices covered by the preceding groups of speedometers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/20—Speed
- B60G2400/208—Speed of wheel rotation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/30—Propulsion unit conditions
- B60G2400/302—Selected gear ratio; Transmission function
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/02—Retarders, delaying means, dead zones, threshold values, cut-off frequency, timer interruption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/04—Means for informing, instructing or displaying
- B60G2600/042—Monitoring means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/08—Failure or malfunction detecting means
- B60G2600/082—Sensor drift
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/12—Sampling or average detecting; Addition or substraction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/70—Estimating or calculating vehicle parameters or state variables
- B60G2800/702—Improving accuracy of a sensor signal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/80—Detection or control after a system or component failure
- B60G2800/802—Diagnostics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/94—Electronic Stability Program (ESP, i.e. ABS+ASC+EMS)
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2260/00—Interaction of vehicle brake system with other systems
- B60T2260/04—Automatic transmission
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/40—Failsafe aspects of brake control systems
- B60T2270/413—Plausibility monitoring, cross check, redundancy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/40—Failsafe aspects of brake control systems
- B60T2270/416—Wheel speed sensor failure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/0215—Sensor drifts or sensor failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/10—Change speed gearings
- B60W2510/104—Output speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Transportation (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Regulating Braking Force (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
- Control Of Transmission Device (AREA)
Description
[0001]本出願は、2012年12月27日出願の「SYSTEM AND METHOD FOR MONITORING AN ESTIMATED WHEEL SPEED OF A VEHICLE USING A TRANSMISSION OUTPUT SHAFT SENSOR(変速機出力軸センサを用いて車両の推定車輪速度を監視するためのシステムおよび方法)」という名称の米国仮特許出願第61/746,205号の利益を主張し、その全内容が参照により本明細書に組み込まれる。
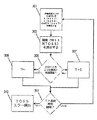
[0022]最後に、ECU101は、次式に従って、各車両車軸上の車輪速度の和を等しくすることにより、第4の車輪131の推定速度を算出する:
VRL_3wss=VFL+VFR−VRR (3)
式中、VRL_3wssは第4の車輪131の推定車輪速度であり、VFLは左前輪135の測定車輪速度であり、VFRは右前輪137の測定車輪速度であり、VRRは右後輪133の測定車輪速度である。
Claims (14)
- 車輪の確定車輪速度を監視する方法であって、
第1の車輪速度センサから車両の第1の車輪の測定車輪速度を示す第1の車輪速度値を受信するステップと、
第2の車輪速度センサから前記車両の第2の車輪の測定車輪速度を示す第2の車輪速度値を受信するステップと、
第3の車輪速度センサから前記車両の第3の車輪の測定車輪速度を示す第3の車輪速度値を受信するステップと、
前記第1の車輪速度値、前記第2の車輪速度値、および前記第3の車輪速度値からなる群から選択される少なくとも2つの値に基づいて、前記車両の第4の車輪に関する推定車輪速度値を求めるステップと、
変速機出力速度センサから受信される情報に基づいて、前記第4の車輪に関する算出車輪速度値を求めるステップと、
前記第4の車輪に関する前記推定車輪速度値と前記第4の車輪に関する前記算出車輪速度値との間の偏差に基づいて、故障状態が存在すると判定するステップと
を含み、
前記第4の車輪に関する前記推定車輪速度値および前記算出車輪速度値は、前記第4の車輪の車輪速度についてのいかなる直接測定も含まない、方法。 - 前記第4の車輪に関する推定車輪速度値を求めるステップが、
前記第1の車輪速度値、前記第2の車輪速度値、および前記第3の車輪速度値の平均を算出するステップと、
前記第4の車輪に関する前記推定車輪速度値を前記算出された平均として設定するステップと
を含む、請求項1に記載の方法。 - 前記第4の車輪に関する推定車輪速度値を求めるステップが、
前記第1の車輪速度値および前記第2の車輪速度値の平均を算出するステップであって、前記第1の車輪および前記第2の車輪が前記車両の前端に位置し、前記第3の車輪および前記第4の車輪が前記車両の後端に位置する、ステップと、
前記第4の車輪に関する前記推定車輪速度値を前記算出された平均として設定するステップとを含む、請求項1に記載の方法。 - 前記第4の車輪に関する推定車輪速度値を求めるステップが、
前記第1の車輪速度値および前記第2の車輪速度値の和から前記第3の車輪速度値を減算するステップであって、前記第1の車輪および前記第2の車輪が前記車両の前端に位置し、前記第3の車輪および前記第4の車輪が前記車両の後端に位置する、ステップと、
前記第4の車輪に関する前記推定車輪速度値を前記減算の結果として設定するステップとを含む、請求項1に記載の方法。 - 前記第4の車輪に関する前記推定車輪速度値と前記第4の車輪に関する前記算出車輪速度値との間の偏差に基づいて、故障状態が存在すると判定するステップが、
前記推定車輪速度値および前記算出車輪速度値に基づいて、偏差値を算出するステップと、
前記偏差値を偏差閾値と比較するステップと、
前記偏差値が規定期間にわたり前記偏差閾値を超える場合に、故障状態が存在すると判定するステップと
を含む、請求項1に記載の方法。 - 安定運転状況が存在するか判定するステップと、
安定運転状況が存在する場合に第1の監視モードで動作するステップと、
不安定運転状況が存在する場合に第2の監視モードで動作するステップと
をさらに含み、
前記第4の車輪に関する前記推定車輪速度値と前記第4の車輪に関する前記算出車輪速度値との間の偏差に基づいて、故障状態が存在すると判定するステップが、
前記推定車輪速度値および前記算出車輪速度値に基づいて、偏差値を算出するステップと、
前記第1の監視モードでの動作時に前記偏差値を第1の偏差閾値と比較するステップと、
前記第2の監視モードでの動作時に前記偏差値を第2の偏差閾値と比較するステップであって、前記第2の偏差閾値が前記第1の偏差閾値よりも大きい、ステップと、
前記第1の監視モードでの動作時に前記偏差値が第1の規定期間にわたり前記第1の偏差閾値を超える場合に、故障状態が存在すると判定するステップと、
前記第2の監視モードでの動作時に前記偏差値が第2の規定期間にわたり前記第2の偏差閾値を超える場合に、故障状態が存在すると判定するステップであって、前記第2の規定期間が前記第1の規定期間よりも長い、ステップと
を含む、請求項1に記載の方法。 - 車輪速度監視システムであって、
第1の車輪速度センサと、
第2の車輪速度センサと、
第3の車輪速度センサと、
プロセッサと、
前記プロセッサにより実行された場合、前記車輪速度監視システムに、
前記第1の車輪速度センサから車両の第1の車輪の測定車輪速度を示す第1の車輪速度値を受信させ、
前記第2の車輪速度センサから前記車両の第2の車輪の測定車輪速度を示す第2の車輪速度値を受信させ、
前記第3の車輪速度センサから前記車両の第3の車輪の測定車輪速度を示す第3の車輪速度値を受信させ、
前記第1の車輪速度値、前記第2の車輪速度値、および前記第3の車輪速度値からなる群から選択される少なくとも2つの値に基づいて、前記車両の第4の車輪に関する推定車輪速度値を求めさせ、
変速機出力速度センサから受信される情報に基づいて、前記第4の車輪に関する算出車輪速度値を求めさせ、且つ
前記第4の車輪に関する前記推定車輪速度値と前記第4の車輪に関する前記算出車輪速度値との間の偏差に基づいて、故障状態が存在すると判定させる
命令を記憶しているメモリと
を備え、
前記第4の車輪に関する前記推定車輪速度値および前記算出車輪速度値は、前記第4の車輪の車輪速度についてのいかなる直接測定も含まない、車輪速度監視システム。 - 前記命令が、前記プロセッサにより実行された場合、前記車輪速度監視システムに、
前記第1の車輪速度値、前記第2の車輪速度値、および前記第3の車輪速度値の平均を算出することと、
前記第4の車輪に関する推定車輪速度値を前記算出された平均として設定することと
により、前記第4の車輪に関する前記推定車輪速度値を求めさせる、請求項7に記載の車輪速度監視システム。 - 前記命令が、前記プロセッサにより実行された場合、前記車輪速度監視システムに、
前記第1の車輪速度値および前記第2の車輪速度値の平均を算出することであって、前記第1の車輪および前記第2の車輪が前記車両の前端に位置し、前記第3の車輪および前記第4の車輪が前記車両の後端に位置する、算出することと、
前記第4の車輪に関する推定車輪速度値を前記算出された平均として設定することと
により、前記第4の車輪に関する前記推定車輪速度値を求めさせる、請求項7に記載の車輪速度監視システム。 - 前記命令が、前記プロセッサにより実行された場合、前記車輪速度監視システムに、
前記第1の車輪速度値および前記第2の車輪速度値の和から前記第3の車輪速度値を減算することであって、前記第1の車輪および前記第2の車輪が前記車両の前端に位置し、前記第3の車輪および前記第4の車輪が前記車両の後端に位置する、減算することと、
前記第4の車輪に関する推定車輪速度値を前記減算の結果として設定することと
により、前記第4の車輪に関する前記推定車輪速度値を求めさせる、請求項7に記載の車輪速度監視システム。 - 前記命令が、前記プロセッサにより実行された場合、前記車輪速度監視システムに、
前記推定車輪速度値および前記算出車輪速度値に基づいて、偏差値を算出することと、
前記偏差値を偏差閾値と比較することと、
前記偏差値が規定期間にわたり前記偏差閾値を超える場合に、故障状態が存在すると判定することと
により、前記第4の車輪に関する前記推定車輪速度値と前記第4の車輪に関する前記算出車輪速度値との間の偏差に基づいて、故障状態が存在すると判定させる、請求項7に記載の車輪速度監視システム。 - 前記命令が、前記プロセッサにより実行された場合、さらに前記車輪速度監視システムに、
安定運転状況が存在するか判定させ、
安定運転状況が存在する場合に第1の監視モードで動作させ、且つ
不安定運転状況が存在する場合に第2の監視モードで動作させ、
前記命令が、前記プロセッサにより実行された場合、前記車輪速度監視システムに、
前記推定車輪速度値および前記算出車輪速度値に基づいて、偏差値を算出することと、
前記第1の監視モードでの動作時に前記偏差値を第1の偏差閾値と比較することと、
前記第2の監視モードでの動作時に前記偏差値を第2の偏差閾値と比較することであって、前記第2の偏差閾値が前記第1の偏差閾値よりも大きい、比較することと、
前記第1の監視モードでの動作時に前記偏差値が第1の規定期間にわたり前記第1の偏差閾値を超える場合に、故障状態が存在すると判定することと、
前記第2の監視モードでの動作時に前記偏差値が第2の規定期間にわたり前記第2の偏差閾値を超える場合に、故障状態が存在すると判定することであって、前記第2の規定期間が前記第1の規定期間よりも長い、判定することと
により、前記第4の車輪に関する前記推定車輪速度値と前記第4の車輪に関する前記算出車輪速度値との間の偏差に基づいて、故障状態が存在すると判定させる、請求項7に記載の車輪速度監視システム。 - プロセッサとメモリとを備える車輪速度監視システムであって、前記メモリが、前記プロセッサにより実行された場合、前記車輪速度監視システムに、
第1の車輪速度センサから車両の第1の車輪の測定車輪速度を示す第1の車輪速度値を受信させ、
第2の車輪速度センサから前記車両の第2の車輪の測定車輪速度を示す第2の車輪速度値を受信させ、
第3の車輪速度センサから前記車両の第3の車輪の測定車輪速度を示す第3の車輪速度値を受信させ、
前記車両の第4の車輪に関する複数の推定車輪速度値を求めさせ、前記複数の推定車輪速度値の各推定車輪速度値が、前記第1の車輪速度値、前記第2の車輪速度値、および前記第3の車輪速度値からなる群から選択される少なくとも2つの値に基づいて異なる推定機構に従って求められ、
変速機出力速度センサから受信される情報に基づいて、前記第4の車輪に関する算出車輪速度値を求めさせ、
複数の偏差値を算出させ、各偏差値が前記第4の車輪に関する前記複数の推定車輪速度値の1つおよび前記算出車輪速度値に基づき、
前記複数の偏差値の各偏差値を偏差閾値と比較させ、
前記複数の偏差値のうちの前記偏差閾値を超える偏差値の数を求めさせ、且つ
前記複数の偏差値のうちの前記偏差閾値を超える偏差値の前記数が規定期間にわたり偏差量閾値を超える場合に、故障状態が存在すると判定させる
命令を記憶し、
前記第4の車輪に関する前記推定車輪速度値および前記算出車輪速度値は、前記第4の車輪の車輪速度についてのいかなる直接測定も含まない、車輪速度監視システム。 - 前記命令が、前記プロセッサにより実行された場合、さらに前記車輪速度監視システムに、
不安定運転状況が存在するか判定させ、
不安定運転状況が存在する場合に第2の監視モードで動作させ、
前記第2の監視モードでの動作時に前記複数の偏差値の各偏差値を第2の偏差閾値と比較させ、前記第2の偏差閾値が前記偏差閾値よりも大きく、
前記第2の監視モードでの動作時に前記複数の偏差値のうちの前記第2の偏差閾値を超える偏差値の数を求めさせ、且つ
前記第2の監視モードでの動作時に前記複数の偏差値のうちの前記第2の偏差閾値を超える偏差値の前記数が第2の規定期間にわたり第2の偏差量閾値を超える場合に、故障状態が存在すると判定させ、前記第2の偏差量閾値が前記偏差量閾値よりも大きく、且つ前記第2の規定期間が前記規定期間よりも大きい、請求項13に記載の車輪速度監視システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261746205P | 2012-12-27 | 2012-12-27 | |
| US61/746,205 | 2012-12-27 | ||
| US13/906,908 | 2013-05-31 | ||
| US13/906,908 US9218695B2 (en) | 2012-12-27 | 2013-05-31 | System and method for monitoring an estimated wheel speed of a vehicle using a transmission output shaft sensor |
| PCT/US2013/075042 WO2014105465A1 (en) | 2012-12-27 | 2013-12-13 | System and method for monitoring an estimated wheel speed of a vehicle using a transmission output shaft sensor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016510399A JP2016510399A (ja) | 2016-04-07 |
| JP2016510399A5 JP2016510399A5 (ja) | 2017-01-26 |
| JP6235609B2 true JP6235609B2 (ja) | 2017-11-22 |
Family
ID=51018131
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015550449A Expired - Fee Related JP6235609B2 (ja) | 2012-12-27 | 2013-12-13 | 変速機出力軸センサを用いて車両の推定車輪速度を監視するためのシステムおよび方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9218695B2 (ja) |
| EP (1) | EP2938507B1 (ja) |
| JP (1) | JP6235609B2 (ja) |
| CN (1) | CN104903129B (ja) |
| WO (1) | WO2014105465A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7207148B2 (ja) | 2019-05-14 | 2023-01-18 | 日本製鉄株式会社 | 鉄道車両用軌道の状態評価方法及び鉄道車両用台車 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10266017B2 (en) * | 2015-02-19 | 2019-04-23 | Dana Italia S.R.L. | Integration of sensor network and method of operation into a CTIS framework |
| JPWO2017010476A1 (ja) * | 2015-07-16 | 2018-04-26 | 昭和電工株式会社 | 二次電池用黒鉛含有炭素粉の製造方法及び電池電極用炭素材料 |
| KR101745157B1 (ko) * | 2015-10-26 | 2017-06-08 | 현대자동차주식회사 | 차량용 주행 제어방법 |
| US10486668B2 (en) * | 2017-08-17 | 2019-11-26 | Robert Bosch Gmbh | Systems and methods for redundant wheel speed sensing |
| CN109739078A (zh) * | 2018-12-28 | 2019-05-10 | 芜湖伯特利电子控制系统有限公司 | 一种轮速信号处理冗余方法 |
| CN111381070B (zh) * | 2018-12-29 | 2021-02-23 | 比亚迪股份有限公司 | 一种车辆及其车速计算方法与装置 |
| CN110173562A (zh) * | 2019-04-10 | 2019-08-27 | 东风商用车有限公司 | 一种amt输出轴转速传感器的使用方法 |
| EP4010613A4 (en) * | 2019-08-08 | 2023-11-01 | Sigma Powertrain, Inc. | VEHICLE TRANSMISSION ROTATION CONTROL ASSEMBLY |
| CN113156156B (zh) * | 2021-03-31 | 2022-09-30 | 中车青岛四方车辆研究所有限公司 | 一种列车用多速度传感器系统速度处理方法 |
| US12054161B2 (en) * | 2022-03-09 | 2024-08-06 | GM Global Technology Operations LLC | Traction motor based wheel speed recovery |
| CN114734975B (zh) * | 2022-04-28 | 2023-05-09 | 清智汽车科技(苏州)有限公司 | 同轴车轮速传感器接线识别方法和装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4260942A (en) | 1978-04-17 | 1981-04-07 | Trw Inc. | Failure detection and correction system for redundant control elements |
| JPH0790757B2 (ja) | 1986-08-28 | 1995-10-04 | 曙ブレーキ工業株式会社 | 車輪回転センサの故障検出装置 |
| JP2649712B2 (ja) | 1988-10-22 | 1997-09-03 | 住友電気工業株式会社 | アンチロック制御装置 |
| DE4122484A1 (de) | 1991-07-06 | 1993-01-07 | Teves Gmbh Alfred | Schaltungsanordnung zur erkennung von radsensordefekten |
| US5343396A (en) * | 1992-04-29 | 1994-08-30 | Youngblood Richard J | Sensor malfunction detection |
| JPH07205675A (ja) | 1994-01-26 | 1995-08-08 | Honda Motor Co Ltd | アンチロックブレーキ制御装置付車両における駆動状態切換制御方法 |
| US5431241A (en) * | 1994-05-31 | 1995-07-11 | Zexel-Gleason Usa, Inc. | Hybrid traction control system |
| JPH07333239A (ja) * | 1994-06-09 | 1995-12-22 | Toyota Motor Corp | 車両のアンチスキッド制御装置 |
| US5642280A (en) | 1995-02-03 | 1997-06-24 | Kelsey-Hayes Company | Method and system for determining and compensating for a faulty wheel speed input signal in a vehicle control system |
| JP3624446B2 (ja) * | 1995-02-17 | 2005-03-02 | 日産自動車株式会社 | タイヤ内圧低下検出装置 |
| JPH08318836A (ja) | 1995-05-26 | 1996-12-03 | Mazda Motor Corp | 車両の制御装置 |
| DE19610864B4 (de) | 1996-03-20 | 2005-03-03 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung der Raddrehgeschwindigkeit |
| JP3735939B2 (ja) * | 1996-04-25 | 2006-01-18 | 株式会社デンソー | 車両用ブレーキ装置 |
| KR20010093332A (ko) | 1999-12-08 | 2001-10-27 | 그라우엘 안드레아스 | 자동차에서 적어도 하나의 구동륜의 속도 파라미터를결정하기 위한 방법 및 장치 |
| US6285280B1 (en) * | 2000-06-26 | 2001-09-04 | Robert Bosch Corporation | Method for detecting a deflated tire on a vehicle |
| US6591937B2 (en) * | 2001-12-05 | 2003-07-15 | Delphi Technologies, Inc. | Adaptive variable effort power steering system |
| US7792617B2 (en) * | 2006-05-08 | 2010-09-07 | Ford Global Technologies | Wheel speed sensing system for electronic stability control |
| US7569948B2 (en) | 2006-09-26 | 2009-08-04 | Gm Global Technology Operations, Inc. | Method and system to prevent false speed display during high engine speed operation |
| JP4965396B2 (ja) * | 2007-09-06 | 2012-07-04 | トヨタ自動車株式会社 | 車両制御装置 |
| US8027771B2 (en) | 2007-09-13 | 2011-09-27 | GM Global Technology Operations LLC | Method and apparatus to monitor an output speed sensor during operation of an electro-mechanical transmission |
| FR2923436B1 (fr) | 2007-11-09 | 2010-04-09 | Michelin Soc Tech | Systeme de controle du comportement d'un vehicule comportant une determination de sa vitesse par rapport au sol |
| JP2009128239A (ja) * | 2007-11-26 | 2009-06-11 | Mitsubishi Fuso Truck & Bus Corp | 車速センサの故障判定装置及び故障判定方法 |
| US8771140B2 (en) | 2008-12-22 | 2014-07-08 | Caterpillar Inc. | Machine control system utilizing inertial yaw sensor |
| US8620555B2 (en) | 2009-11-30 | 2013-12-31 | GM Global Technology Operations LLC | Wheel slip determination for vehicles |
| US8437884B2 (en) | 2010-07-28 | 2013-05-07 | GM Global Technology Operations LLC | System and method for detecting vehicle motion |
| US9555783B2 (en) * | 2011-03-03 | 2017-01-31 | Robert Bosch Gmbh | Wheel speed estimation using a drivetrain model |
-
2013
- 2013-05-31 US US13/906,908 patent/US9218695B2/en not_active Expired - Fee Related
- 2013-12-13 EP EP13821239.4A patent/EP2938507B1/en not_active Not-in-force
- 2013-12-13 WO PCT/US2013/075042 patent/WO2014105465A1/en active Application Filing
- 2013-12-13 JP JP2015550449A patent/JP6235609B2/ja not_active Expired - Fee Related
- 2013-12-13 CN CN201380067956.7A patent/CN104903129B/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7207148B2 (ja) | 2019-05-14 | 2023-01-18 | 日本製鉄株式会社 | 鉄道車両用軌道の状態評価方法及び鉄道車両用台車 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2938507B1 (en) | 2018-04-25 |
| US9218695B2 (en) | 2015-12-22 |
| CN104903129B (zh) | 2017-07-04 |
| EP2938507A1 (en) | 2015-11-04 |
| JP2016510399A (ja) | 2016-04-07 |
| WO2014105465A1 (en) | 2014-07-03 |
| US20140188352A1 (en) | 2014-07-03 |
| CN104903129A (zh) | 2015-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6235609B2 (ja) | 変速機出力軸センサを用いて車両の推定車輪速度を監視するためのシステムおよび方法 | |
| CN107628036B (zh) | 传感器故障的检测和重建 | |
| JP6056954B2 (ja) | 車両の走行運動制御装置 | |
| JP6396213B2 (ja) | ステアリング装置のラック力を決定するための方法、及び、ステアリング装置 | |
| JP6069148B2 (ja) | 車両制御装置 | |
| US9969425B2 (en) | Rear wheel steering control | |
| US20190164362A1 (en) | Vehicle suspension system alignment monitoring | |
| CN107685737B (zh) | 用于确定车辆打滑失控状态的方法和系统 | |
| JP6106261B2 (ja) | 車両におけるアクティブ操舵システム用の非線形補償制御装置 | |
| KR102030714B1 (ko) | 전기 또는 하이브리드 차량의 회생 제동 제어 | |
| US20150046033A1 (en) | Vehicle height estimation device and vehicle height estimation method | |
| KR102644549B1 (ko) | 차량의 통합 제어 장치 | |
| JPWO2014136188A1 (ja) | 車両の基準運動状態量の演算方法 | |
| CN108688668B (zh) | 用于车辆侧向力控制的方法和系统 | |
| CN106232439B (zh) | 用于运行电子制动系统的方法 | |
| KR20140148186A (ko) | 사륜 구동 차량의 조향각 추정 방법 | |
| US8868281B2 (en) | Understeer assessment for vehicles | |
| US20230115854A1 (en) | Traction controller, traction control method, and non-transitory computer-readable storage medium | |
| JP3271956B2 (ja) | 車両の路面摩擦係数推定装置 | |
| JP2017105395A (ja) | 車両制御装置 | |
| JP5089558B2 (ja) | 路面摩擦係数推定装置 | |
| JP5451336B2 (ja) | 自動軌道補正方法 | |
| JP2022506843A (ja) | 前輪のみに基づく後輪速度評価を含む自動車の制御モジュールおよび方法 | |
| JP2013517988A5 (ja) | ||
| JP2013517988A (ja) | 車両の経路追跡システム及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161209 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170908 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171026 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6235609 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |