JP6224595B2 - 顕微鏡デバイス - Google Patents
顕微鏡デバイス Download PDFInfo
- Publication number
- JP6224595B2 JP6224595B2 JP2014533422A JP2014533422A JP6224595B2 JP 6224595 B2 JP6224595 B2 JP 6224595B2 JP 2014533422 A JP2014533422 A JP 2014533422A JP 2014533422 A JP2014533422 A JP 2014533422A JP 6224595 B2 JP6224595 B2 JP 6224595B2
- Authority
- JP
- Japan
- Prior art keywords
- sample
- pattern
- illumination pattern
- illumination
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
- G02B21/08—Condensers
- G02B21/14—Condensers affording illumination for phase-contrast observation
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0032—Optical details of illumination, e.g. light-sources, pinholes, beam splitters, slits, fibers
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/36—Microscopes arranged for photographic purposes or projection purposes or digital imaging or video purposes including associated control and data processing arrangements
- G02B21/365—Control or image processing arrangements for digital or video microscopes
- G02B21/367—Control or image processing arrangements for digital or video microscopes providing an output produced by processing a plurality of individual source images, e.g. image tiling, montage, composite images, depth sectioning, image comparison
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/58—Optics for apodization or superresolution; Optical synthetic aperture systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/62—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light
- G01N21/63—Systems in which the material investigated is excited whereby it emits light or causes a change in wavelength of the incident light optically excited
- G01N21/64—Fluorescence; Phosphorescence
- G01N21/645—Specially adapted constructive features of fluorimeters
- G01N21/6456—Spatial resolved fluorescence measurements; Imaging
- G01N21/6458—Fluorescence microscopy
Description
shutter)」技法とも呼ばれている。
1.1次元構造化照明
現在において一般的な全ての構造化照明法では、1つの空間方向の1つまたは複数の周波数を有するパターンが使用される。その際には、いくつかの位相画像を撮影し、撮影と撮影の間にはパターンまたはパターンの画像をシフトしなければならない。1つの空間方向の1つの周波数を仮定すると、1番目の位相画像の1つの画素(x,y)の強度は下式のように書くことができる。

I0=I1+I2+I3 (4)
とは別に、断面図
ここでの次数の分離は、断面図と雑音の分離と正確に同じように機能する。以下ではこの概念を超分解能(superresolution)と呼ぶ。
2.マジック角
2.1 行列
M=N
および
2.2 チェス盤
前述の方法の1つの展開として、いくつかの方向の周波数を含む構造を使用することによって、位相画像が生成されている間にこの構造が一方向にだけ変位するときに、いくつかの方向の周波数部分を互いから分離することもできるかどうかを検討した。
κ2=3 (31)
これは、2つの異なる方位角(orientation angle)の下で1つの解が可能であることを意味する。
κの誤差に対しては下式が生じる。
方程式(7)と同様に、この状況では、画像の空間周波数スペクトルに対して下式が生じる。
a+bcos(cx+d) (37)
に対する当てはめは、チェス盤のそれぞれの周波数方向について、較正物体上のコントラスト
2.3 六角形
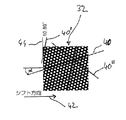
上述のチェス盤パターンの代わりに、六角形パターンを使用して、パターンを1つの空間方向に変位させたときに記録された位相画像を評価することも可能である。
κ2=4 (58)
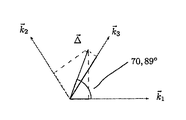
したがって、この場合も、変位ベクトルとx軸の間の2つの方位角が可能であり、チェス盤の場合と同様の考慮から、γ=θ−90°に対してより小さな値が生じる角度が選択される(
Ckは、式(37)の場合と同じ当てはめパラメータを意味する。
δκ=sinθs(1+tan2γ)δγ (66)
θsは、その構造の対称の角度であり、
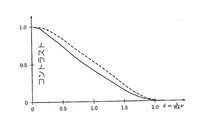
2.3.1 六角形のコントラスト
格子パターンまたはチェス盤パターンとは対照的に、六角形パターンの充填率は(1/2ではなく)1/3である。
2.4 幾何学的解釈
2.4.1 チェス盤
式(12)
αl,±1=αl,±2
となり、したがって∀lおよび行列
2.4.2 六角形
六角形に関しては、マジック角が、変位ベクトルの
2.5 他のマジック角
2.5.1 N=13
コヒーレントなレーザ励起によって、画像内の六角形の2次高調波次数も再結合される場合が生じることがある。量
κ2=8 (89)
したがって、
2.5.2 N=19
さらに
κ2=10 (96)
式(87)から、関連するθの値は以下のとおりである。
θ2=4.31° (98)
2.5.3 その他の解
ある種の状況下で構造化照明とともに非線形超分解能を使用するためには、計算において、(撮影された対応する数の位相画像に対して)六角形のよりいっそう高次の次数を考慮する必要があるであろう。N=43の値まで、ユニタリ行列、したがって理論上の最適解が見つかった。
3.雑音
パート(2.1)で既に指摘したとおり、ユニタリ行列
比較のため:格子を使用し、例えば7つの未処理画像を評価すると、同じ露光時間を有する3つの未処理画像が計算された場合よりも
Claims (29)
- 対物レンズと、照明ビーム経路に沿ってサンプルを照明する光源と、両方の空間方向に構造化された平らな照明パターンを前記サンプル上に生成する装置と、1つの画像ビーム経路に沿って前記サンプルから来た光を検出する表面検出器と、前記サンプル上の前記照明パターンを1つの変位方向にシフトする装置と、前記検出器によって前記光が検出されたときに、前記変位方向に沿った前記パターンの異なる位置の位相画像として1つの画像を撮影し、それらの位相画像から、照明されたサンプル領域の全体構造化照明顕微鏡(SIM)画像を計算により再構成する制御ユニットとを備える顕微鏡デバイスにおいて、前記変位方向が、前記照明パターンの主対称軸に対して斜めであり、前記変位方向が、前記照明パターンに応じて、前記SIM画像の再構成に必要な位相画像の数が、照明パターンの強度のフーリエ次数の数に等しい理論上最低限必要な値に一致するような態様で選択されることを特徴とする顕微鏡デバイス。
- 前記照明パターンが六角形点パターンであり、前記変位方向が、3つの主対称軸のうちの1つの主対称軸に対して1から20度の範囲にあるように選択され、少なくとも7つの位相画像が最低限必要な値である、請求項1に記載の顕微鏡デバイス。
- 前記変位方向が、3つの主対称軸のうちの1つの主対称軸に対して4から20度、好ましくは13から20度の範囲にあるように選択される、請求項2に記載の顕微鏡デバイス。
- 前記照明パターンを生成する前記装置が、位相画像ごとに、照明されるサンプル表面の全ての領域を前記照明パターンで同時に照明するようになされている、請求項1から3のいずれか一項に記載の顕微鏡デバイス。
- 前記照明パターンを生成する前記装置が、位相画像ごとに、照明されるサンプル表面の部分領域において前記照明パターンを逐次的に生成および除去するようになされており、照明されるサンプル表面が、前記照明パターンで同時には照明されず、一部分ずつ逐次的に照明されるように、前記部分領域が、全体として、照明されるサンプル表面をカバーし、前記制御ユニットが、実質的にサンプル表面のちょうど照明された部分領域が結像されるときにだけ前記検出器の対応する領域がアクティブになるような態様で前記検出器を制御するようになされている、請求項1から3のいずれか一項に記載の顕微鏡デバイス。
- 対物レンズと、照明ビーム経路に沿ってサンプルを照明する光源と、少なくとも1つの空間方向に構造化された照明パターンを前記サンプル上に生成する装置と、1つの画像ビーム経路に沿って前記サンプルから来た光を検出する表面検出器と、前記サンプル上の前記照明パターンを1つの変位方向にシフトする装置と、前記検出器によって前記光が検出されたときに、前記変位方向に沿った前記パターンの異なる位置の位相画像として1つの画像を撮影する制御ユニットとを備え、照明されたサンプル領域の全体画像が、前記位相画像から計算により再構成され、前記照明パターンを生成する前記装置が、位相画像ごとに、照明されるサンプル表面の部分領域において前記照明パターンを逐次的に生成および除去するようになされており、照明されるサンプル表面が、前記照明パターンで同時には照明されず、一部分ずつ逐次的に照明されるように、前記部分領域が、全体として、照明されるサンプル表面をカバーし、前記制御ユニットが、実質的にサンプル表面のちょうど照明された部分領域が結像されるときにだけ前記検出器の対応する領域がアクティブになるような態様で前記検出器を制御するようになされている顕微鏡デバイス。
- 前記照明パターンを生成する前記装置が、前記照明パターンを、一方向に移動するストリップの形態で生成および除去するようになされている、請求項6に記載の顕微鏡デバイス。
- 前記ストリップの幅が、前記ストリップで照明されたサンプル領域が少なくとも3本の検出器線上に結像されるように選択される、請求項7に記載の顕微鏡デバイス。
- 前記ストリップが縦方向にだけ構造化される、請求項7または8に記載の顕微鏡デバイス。
- 前記ストリップが横方向に回折限界がある、請求項7から9のいずれか一項に記載の顕微鏡デバイス。
- 前記照明パターンを生成する前記装置が、前記ストリップを、前記ストリップを横切る方向にだけ移動させるようになされている、請求項7から10のいずれか一項に記載の顕微鏡デバイス。
- 前記構造化された照明パターンを生成する前記装置が円柱レンズ・アレイを有し、移動するストリップの方向が前記円柱レンズの軸方向に対して平行である、請求項7から11のいずれか一項に記載の顕微鏡デバイス。
- 前記ストリップの縦方向の、前記検出器上での前記ストリップの前記結像が、前記検出器表面の部分領域の上だけに及び、曲線状の軌道をたどるために、前記照明パターンを生成する前記装置が、前記パターンが組み合わせられているときに、前記ストリップを、前記ストリップを横切る方向だけでなく、前記ストリップの縦方向にも移動させるように作られている、請求項7から10のいずれか一項に記載の顕微鏡デバイス。
- 前記照明パターンの前記変位方向が、前記ストリップの縦方向に1つの成分を含む、請求項7から13のいずれか一項に記載の顕微鏡デバイス。
- 前記構造化された照明パターンを生成する前記装置が、物体平面または物体平面と共役する平面に前記照明パターンを生成するようになされている、請求項7から14のいずれか一項に記載の顕微鏡デバイス。
- 前記構造化された照明パターンを生成する前記装置が、前記対物レンズの瞳内のコヒーレント照明光の干渉する焦点によって、前記照明パターンを生成するようになされている、請求項15に記載の顕微鏡デバイス。
- 前記サンプル上の前記照明パターンをシフトする前記装置が、前記サンプル上の前記照明パターンをシフトするために、前記対物レンズの瞳内の前記焦点の大きさの相対的な位相シフトを引き起こすようになされている、請求項16に記載の顕微鏡デバイス。
- 前記サンプル上の前記照明パターンをシフトする前記装置が、前記対物レンズの瞳内の前記焦点の前記相対的な位相シフトを引き起こすために、前記対物レンズの瞳の中もしくは瞳の近くのガルバノメトリック走査器、音響光学変調器、または圧電アクチュエータとミラーの組合せをその1つのアームに備える干渉計を有する、請求項17に記載の顕微鏡デバイス。
- 前記構造化された照明パターンを生成する前記装置が、1つの中間画像平面に点パターンを生成する要素を有する、請求項15に記載の顕微鏡デバイス。
- 前記中間画像平面に前記点パターンを生成する前記要素が、前記中間画像平面に位置する穴のあいたマスクである、請求項19に記載の顕微鏡デバイス。
- 前記中間画像平面に前記点パターンを生成する前記要素が、前記中間画像平面に前記照明光の焦点を生成するために前記光源と前記中間画像平面の間に配置されたマイクロレンズ・アレイである、請求項19に記載の顕微鏡デバイス。
- 前記サンプル上の前記照明パターンをシフトする前記装置が、前記中間画像平面と第1の管状レンズの間の非無限空間にビーム偏向要素を有する、請求項4、19から21のいずれか一項に記載の顕微鏡デバイス。
- 前記ビーム偏向要素が、動力付きの偏向ミラーまたは回転するガラス窓として作られている、請求項22に記載の顕微鏡デバイス。
- 前記中間画像平面に前記点パターンを生成する前記要素にわたって照明光を移動させて、前記照明パターンを逐次的に生成および除去するために、前記照明パターンを生成する前記装置が、1つの走査レンズを備える走査デバイスを有する、請求項5、6、19から21のいずれか一項に記載の顕微鏡デバイス。
- 前記点パターンを含む前記中間画像平面に対して絶対的に対称な平面に前記表面検出器が位置するように作られた、請求項19に記載の顕微鏡デバイス。
- 前記中間画像平面が、前記第1の管状レンズと前記対物レンズのうちの一方によって前記サンプル上に結像され、前記サンプルが、前記対物レンズおよび前記第1の管状レンズと同じ第2の管状レンズによって前記表面検出器上に結像され、色分割器によって、前記照明ビーム経路が前記画像ビーム経路から分離される、請求項25に記載の顕微鏡デバイス。
- 前記サンプルの2光子励起の検出用に作られた、請求項7から26のいずれか一項に記載の顕微鏡デバイス。
- 光源と対物レンズ(22)からの光で照明ビーム経路(12)に沿ってサンプル(24)を照明することであり、前記光源(10)は前記サンプル上に両方の空間方向に構造化された平らな照明パターン(32)を生成することと、
1つの画像ビーム経路(34)に沿って前記サンプルから来た光を表面検出器で検出することと、
前記サンプル上の前記照明パターンを1つの変位方向にシフトすることと、
前記検出器によって前記光が検出されたときに、前記変位方向(42)に沿った前記パターンの異なる位置の位相画像として1つの画像を撮影することと、
それらの位相画像から、照明されたサンプル領域の全体構造化照明顕微鏡(SIM)画像を計算により再構成することと、
を備える顕微鏡法であって、
前記変位方向が、前記照明パターン(32)の主対称軸(40、40’、40’’、140、140’)に対して斜めであり、前記照明パターンに応じて、前記SIM画像の再構成に必要な位相画像の数が、照明パターンの強度のフーリエ次数の数に等しい理論上最低限必要な値に一致するように、前記変位方向が選択される
顕微鏡法。 - 前記照明パターン(32)が六角形点パターンであり、前記変位方向(42)が、3つの主対称軸のうちの1つの主対称軸(40、40’、40’’)に対して1から20度の範囲にあるように選択され、少なくとも7つの位相画像が最低限必要な値である、請求項28に記載の顕微鏡法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011114500.5A DE102011114500B4 (de) | 2011-09-29 | 2011-09-29 | Mikroskopvorrichtung |
| DE102011114500.5 | 2011-09-29 | ||
| PCT/US2012/058027 WO2013049646A1 (en) | 2011-09-29 | 2012-09-28 | Microscope device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014532197A JP2014532197A (ja) | 2014-12-04 |
| JP2014532197A5 JP2014532197A5 (ja) | 2015-11-12 |
| JP6224595B2 true JP6224595B2 (ja) | 2017-11-01 |
Family
ID=47878605
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014533422A Active JP6224595B2 (ja) | 2011-09-29 | 2012-09-28 | 顕微鏡デバイス |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9606345B2 (ja) |
| EP (2) | EP2761356B1 (ja) |
| JP (1) | JP6224595B2 (ja) |
| CN (1) | CN103890633B (ja) |
| DE (1) | DE102011114500B4 (ja) |
| WO (1) | WO2013049646A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102058780B1 (ko) * | 2017-11-29 | 2019-12-23 | (주)로고스바이오시스템스 | 라인 스캐닝 방식의 공초점 현미경에서의 자동초점조절 방법 및 장치 |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012009836A1 (de) * | 2012-05-16 | 2013-11-21 | Carl Zeiss Microscopy Gmbh | Lichtmikroskop und Verfahren zur Bildaufnahme mit einem Lichtmikroskop |
| DE102012018303A1 (de) * | 2012-09-14 | 2014-03-20 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Messgerät zur Lumineszenzmessung |
| CN103207449B (zh) * | 2013-04-17 | 2015-04-29 | 华中科技大学 | 一种结构光快速扫描显微成像方法 |
| US9350921B2 (en) * | 2013-06-06 | 2016-05-24 | Mitutoyo Corporation | Structured illumination projection with enhanced exposure control |
| WO2015052936A1 (ja) * | 2013-10-09 | 2015-04-16 | 株式会社ニコン | 構造化照明顕微鏡装置 |
| DE102013017124A1 (de) | 2013-10-15 | 2015-04-16 | Carl Zeiss Microscopy Gmbh | Scanmikroskop und Verfahren zum Betreiben eines Scanmikroskops |
| JP6270615B2 (ja) * | 2014-05-02 | 2018-01-31 | オリンパス株式会社 | 標本像データ生成装置、及び、標本像データ生成方法 |
| US10746980B2 (en) | 2014-08-26 | 2020-08-18 | General Electric Company | Calibration of microscopy systems |
| US9797767B2 (en) | 2014-08-26 | 2017-10-24 | General Electric Company | Calibration of microscopy systems |
| US11300773B2 (en) * | 2014-09-29 | 2022-04-12 | Agilent Technologies, Inc. | Mid-infrared scanning system |
| DE102014017001A1 (de) * | 2014-11-12 | 2016-05-12 | Carl Zeiss Ag | Mikroskop mit geringem Verzeichnungsfehler |
| US9953428B2 (en) | 2015-03-03 | 2018-04-24 | Microsoft Technology Licensing, Llc | Digital camera unit with simultaneous structured and unstructured illumination |
| BR112017007137A2 (pt) * | 2015-03-19 | 2017-12-19 | Koninklijke Philips Nv | scanner de patologia digital |
| DE102015209758A1 (de) * | 2015-05-28 | 2016-12-01 | Carl Zeiss Microscopy Gmbh | Anordnung und Verfahren zur Strahlformung und zur Lichtblattmikroskopie |
| CN107667310B (zh) * | 2015-06-02 | 2021-01-01 | 生命技术公司 | 荧光成像系统 |
| DE102015109645B3 (de) | 2015-06-17 | 2016-09-08 | Carl Zeiss Microscopy Gmbh | Verfahren zur Multiliniendetektion |
| CN105158224B (zh) * | 2015-09-09 | 2017-10-20 | 深圳大学 | 一种提高多光子成像信号强度的方法及系统 |
| DE102015116598A1 (de) | 2015-09-30 | 2017-03-30 | Carl Zeiss Microscopy Gmbh | Verfahren und Mikroskop zur hochauflösenden Abbildung mittels SIM |
| WO2017060954A1 (ja) * | 2015-10-05 | 2017-04-13 | オリンパス株式会社 | 撮像装置 |
| ITUB20154591A1 (it) * | 2015-10-12 | 2017-04-12 | Crestoptics S R L | Apparato di microscopia confocale e relativo procedimento di acquisizione ed elaborazione di immagini |
| WO2017192896A1 (en) * | 2016-05-06 | 2017-11-09 | Uwm Research Foundation, Inc. | Snapshot optical tomography system and method of acquiring an image with the system |
| DE102016007839A1 (de) | 2016-06-28 | 2017-12-28 | Horst Wochnowski | Hochauflösendes Verfahren zur Mikroskopie und Nanostrukturierung von Substratoberflächen basierend auf dem SIM-Verfahren (Structured Illumination Microscopy) |
| FR3054321B1 (fr) * | 2016-07-25 | 2018-10-05 | Centre National De La Recherche Scientifique - Cnrs - | Systeme et procede de mesure d'un parametre physique d'un milieu |
| US10908072B2 (en) | 2016-12-15 | 2021-02-02 | The Board Of Regents Of The University Of Texas System | Total internal reflection and transmission illumination fluorescence microscopy imaging system with improved background suppression |
| CN107101982A (zh) * | 2017-03-09 | 2017-08-29 | 深圳先进技术研究院 | 荧光显微装置 |
| TWI791046B (zh) * | 2017-10-02 | 2023-02-01 | 美商奈米創尼克影像公司 | 減少顯微鏡成像中之暈影的設備及方法 |
| WO2019070226A1 (en) | 2017-10-02 | 2019-04-11 | Nanotronics Imaging, Inc. | APPARATUS AND METHOD FOR REDUCING VIGNETTING IN MICROSCOPIC IMAGING |
| CA3086974A1 (en) * | 2018-02-09 | 2019-08-15 | Alcon Inc. | System inverting controller for laser scanning systems |
| EP3614190A1 (en) | 2018-08-20 | 2020-02-26 | Till GmbH | Microscope device with virtual objective |
| DE102018124984A1 (de) * | 2018-10-10 | 2020-04-16 | Friedrich-Schiller-Universität Jena | Verfahren und Vorrichtung zur hochaufgelösten Fluoreszenzmikroskopie |
| CN111122568B (zh) * | 2018-11-01 | 2022-04-22 | 华中科技大学苏州脑空间信息研究院 | 一种高通量光学层析成像方法及成像系统 |
| US11347040B2 (en) * | 2019-02-14 | 2022-05-31 | Double Helix Optics Inc. | 3D target for optical system characterization |
| DE102019129932B4 (de) * | 2019-11-06 | 2023-12-21 | Technische Universität Braunschweig | Optische Detektionseinrichtung und Verfahren zum Betreiben einer optischen Detektionseinrichtung |
| DE102020123668A1 (de) | 2020-09-10 | 2022-03-10 | Carl Zeiss Microscopy Gmbh | Verfahren zur Bildauswertung für die SIM-Mikroskopie und SIM-Mikroskopieverfahren |
| DE102020123669A1 (de) | 2020-09-10 | 2022-03-10 | Carl Zeiss Microscopy Gmbh | Verfahren zur SIM-Mikroskopie |
| CN113219643B (zh) * | 2021-05-11 | 2022-07-12 | 浙江大学 | 一种基于非相干成像边缘模糊的光学显微镜对焦稳定方法及系统 |
| DE102023102991B3 (de) | 2023-02-08 | 2024-02-01 | Till I.D. Gmbh | Verfahren zur Generierung mikroskopischer Schichtaufnahmen 3-dimensionaler fluoreszierender Objekte sowie Vorrichtung, Computerprogramm und computerlesbares Speichermedium |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5078482A (en) * | 1989-07-28 | 1992-01-07 | At&T Bell Laboratories | Resolution confocal microscope, and device fabrication method using same |
| GB9102903D0 (en) | 1991-02-12 | 1991-03-27 | Oxford Sensor Tech | An optical sensor |
| KR960011399B1 (ko) * | 1991-04-03 | 1996-08-22 | 샤프 가부시끼가이샤 | 광학 소자 조립 장치 |
| US5381224A (en) * | 1993-08-30 | 1995-01-10 | A. E. Dixon | Scanning laser imaging system |
| DE19510102C1 (de) * | 1995-03-20 | 1996-10-02 | Rainer Dr Uhl | Konfokales Fluoreszenzmikroskop |
| DE69802514T2 (de) | 1997-04-04 | 2002-06-27 | Isis Innovation | Abbildungssystem und -verfahren für mikroskopie |
| US6248988B1 (en) * | 1998-05-05 | 2001-06-19 | Kla-Tencor Corporation | Conventional and confocal multi-spot scanning optical microscope |
| DE10038527A1 (de) | 2000-08-08 | 2002-02-21 | Zeiss Carl Jena Gmbh | Anordnung zur Erhöhung der Tiefendiskriminierung optisch abbildender Systeme |
| US6731383B2 (en) * | 2000-09-12 | 2004-05-04 | August Technology Corp. | Confocal 3D inspection system and process |
| DE10050529B4 (de) * | 2000-10-11 | 2016-06-09 | Leica Microsystems Cms Gmbh | Verfahren zur Strahlsteuerung in einem Scanmikroskop, Anordnung zur Strahlsteuerung in einem Scanmikroskop und Scanmikroskop |
| DE10155002A1 (de) | 2001-11-08 | 2003-05-22 | Zeiss Carl Jena Gmbh | Verfahren und Anordnung zur tiefenaufgelösten optischen Erfassung einer Probe |
| DE10118463A1 (de) | 2001-04-07 | 2002-10-10 | Zeiss Carl Jena Gmbh | Verfahren und Anordnung zur tiefenaufgelösten optischen Erfassung einer Probe |
| DE10330716A1 (de) * | 2003-07-03 | 2005-02-17 | Carl Zeiss Jena Gmbh | Verfahren und Anordnung zur Eliminierung von Falschlicht |
| US20050225849A1 (en) * | 2004-04-05 | 2005-10-13 | Fujifilm Electronic Imaging Ltd. | Slit confocal microscope and method |
| EP1787157B1 (en) * | 2004-07-23 | 2014-09-24 | GE Healthcare Niagara Inc. | Apparatus for fluorescent confocal microscopy |
| US8081378B2 (en) | 2005-10-13 | 2011-12-20 | Nikon Corporation | Microscope |
| DE102006031177A1 (de) * | 2006-07-06 | 2008-01-10 | Carl Zeiss Microimaging Gmbh | Verfahren und Vorrichtung zur Erzeugung eines Bildes einer dünnen Schicht eines Objekts |
| WO2008010182A2 (de) * | 2006-07-17 | 2008-01-24 | Max Wiki | Analytisches system mit einer anordnung zur zeitlich veränderbaren räumlichen lichtmodulation und damit ausführbares nachweisverfahren |
| US7916304B2 (en) * | 2006-12-21 | 2011-03-29 | Howard Hughes Medical Institute | Systems and methods for 3-dimensional interferometric microscopy |
| US7834980B2 (en) * | 2006-12-21 | 2010-11-16 | Asml Netherlands B. V. | Lithographic apparatus and method |
| DE102007009550B4 (de) | 2007-02-27 | 2008-12-18 | Ludwig-Maximilian-Universität | Verfahren und Mikroskopvorrichtung zur Beobachtung einer bewegten Probe |
| WO2008152605A1 (en) * | 2007-06-15 | 2008-12-18 | Koninklijke Philips Electronics N.V. | Multi-spot scanning optical device for imaging of a sample |
| US20110025837A1 (en) | 2007-08-16 | 2011-02-03 | Koninklijke Philips Electronics N.V. | method of imaging a sample |
| DE102007047468A1 (de) | 2007-09-28 | 2009-04-02 | Carl Zeiss Microimaging Gmbh | Verfahren und Anordnung zur optischen Erfassung einer beleuchteten Probe |
| DE102007047466A1 (de) | 2007-09-28 | 2009-04-02 | Carl Zeiss Microimaging Gmbh | Verfahren und Anordnung zur optischen Erfassung einer beleuchteten Probe |
| DE102007047465A1 (de) * | 2007-09-28 | 2009-04-02 | Carl Zeiss Microimaging Gmbh | Verfahren und Anordnung zur optischen Erfassung einer beleuchteten Probe |
| WO2009115973A1 (en) * | 2008-03-20 | 2009-09-24 | Koninklijke Philips Electronics N.V. | Two-dimensional array of radiation spots for an optical scanning device |
| JP5393406B2 (ja) * | 2009-11-06 | 2014-01-22 | オリンパス株式会社 | パターン投影装置、走査型共焦点顕微鏡、及びパターン照射方法 |
-
2011
- 2011-09-29 DE DE102011114500.5A patent/DE102011114500B4/de active Active
-
2012
- 2012-09-28 CN CN201280047584.7A patent/CN103890633B/zh active Active
- 2012-09-28 EP EP12834935.4A patent/EP2761356B1/en active Active
- 2012-09-28 WO PCT/US2012/058027 patent/WO2013049646A1/en active Application Filing
- 2012-09-28 US US14/346,906 patent/US9606345B2/en active Active
- 2012-09-28 JP JP2014533422A patent/JP6224595B2/ja active Active
- 2012-09-28 EP EP23204576.5A patent/EP4354118A2/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102058780B1 (ko) * | 2017-11-29 | 2019-12-23 | (주)로고스바이오시스템스 | 라인 스캐닝 방식의 공초점 현미경에서의 자동초점조절 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140313576A1 (en) | 2014-10-23 |
| CN103890633A (zh) | 2014-06-25 |
| WO2013049646A1 (en) | 2013-04-04 |
| US9606345B2 (en) | 2017-03-28 |
| EP2761356A4 (en) | 2015-02-25 |
| EP2761356B1 (en) | 2023-11-08 |
| DE102011114500B4 (de) | 2022-05-05 |
| CN103890633B (zh) | 2016-10-26 |
| EP2761356A1 (en) | 2014-08-06 |
| DE102011114500A1 (de) | 2013-04-04 |
| EP4354118A2 (en) | 2024-04-17 |
| JP2014532197A (ja) | 2014-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6224595B2 (ja) | 顕微鏡デバイス | |
| JP4747243B2 (ja) | 試料の光学的深部分解による光学的把握のための方法および装置 | |
| US8040608B2 (en) | System and method for self-interference fluorescence microscopy, and computer-accessible medium associated therewith | |
| EP2817670B1 (en) | Multi-focal structured illumination microscopy systems and methods | |
| JP5170084B2 (ja) | 3次元顕微鏡および3次元画像取得方法 | |
| JP5888416B2 (ja) | 構造化照明顕微鏡装置 | |
| JP5999121B2 (ja) | 共焦点光スキャナ | |
| CN105784653B (zh) | 一种宽场超分辨荧光显微成像装置 | |
| EP2781943A1 (en) | Sample observation device for generating super resolution image | |
| WO2015052936A1 (ja) | 構造化照明顕微鏡装置 | |
| KR102604960B1 (ko) | 홀로그래픽 간섭법의 방법 및 시스템 | |
| CN109620102A (zh) | 基于单根多模光纤的内窥成像系统及方法 | |
| JP2009098215A (ja) | 顕微鏡装置、及び顕微鏡装置における位相変化量の算出方法。 | |
| JP6595618B2 (ja) | 広視野顕微鏡を用いて試料の空間分解された高さ情報を確定するための方法および広視野顕微鏡 | |
| JP7225108B2 (ja) | 多焦点構造化照明顕微鏡システム及び方法 | |
| JP5266551B2 (ja) | 表面形状測定装置、及び表面形状測定方法 | |
| CN109870441A (zh) | 基于移频的三维超分辨光切片荧光显微成像方法和装置 | |
| WO2018151599A1 (en) | Structured illumination scanning microscopy | |
| CN107478628A (zh) | 一种基于光子重组的双光子荧光显微方法及装置 | |
| JP2010271522A (ja) | 非線形光学顕微鏡 | |
| US11892292B2 (en) | Methods and systems of holographic interferometry | |
| JP2023503742A (ja) | 画像から値を推定する装置及び方法 | |
| JP2012203272A (ja) | 顕微鏡装置、観察方法および試料搭載機構 | |
| JP6286982B2 (ja) | 構造化照明顕微鏡装置 | |
| JP2003015049A (ja) | 格子照明顕微鏡およびこれを用いた観察方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150923 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150923 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20160216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161004 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170103 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170303 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6224595 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |