JP6183476B2 - 電子機器及び駆動制御方法 - Google Patents
電子機器及び駆動制御方法 Download PDFInfo
- Publication number
- JP6183476B2 JP6183476B2 JP2015562630A JP2015562630A JP6183476B2 JP 6183476 B2 JP6183476 B2 JP 6183476B2 JP 2015562630 A JP2015562630 A JP 2015562630A JP 2015562630 A JP2015562630 A JP 2015562630A JP 6183476 B2 JP6183476 B2 JP 6183476B2
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- drive control
- top panel
- electronic device
- vibration elements
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
- G06F3/0483—Interaction with page-structured environments, e.g. book metaphor
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
- G06F3/04847—Interaction techniques to control parameter settings, e.g. interaction with sliders or dials
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
- G06F3/0485—Scrolling or panning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
- G06F3/04883—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures for inputting data by handwriting, e.g. gesture or text
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
- G06F3/04886—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures by partitioning the display area of the touch-screen or the surface of the digitising tablet into independently controllable areas, e.g. virtual keyboards or menus
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/169—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated pointing device, e.g. trackball in the palm rest area, mini-joystick integrated between keyboard keys, touch pads or touch stripes
- G06F1/1692—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated pointing device, e.g. trackball in the palm rest area, mini-joystick integrated between keyboard keys, touch pads or touch stripes the I/O peripheral being a secondary touch screen used as control interface, e.g. virtual buttons or sliders
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/01—Indexing scheme relating to G06F3/01
- G06F2203/014—Force feedback applied to GUI
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03547—Touch pads, in which fingers can move on a surface
Description
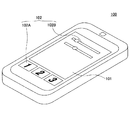
図1は、実施の形態の電子機器100を示す斜視図である。
110 筐体
120 トップパネル
130 両面テープ
140A1、140A2、140A3、140B1、140B2、140B3 振動素子
150 タッチパネル
160 ディスプレイパネル
170 基板
200 制御部
220 アプリケーションプロセッサ
230 通信プロセッサ
240 駆動制御部
250 メモリ
300 駆動制御装置
310 正弦波発生器
320 振幅変調器
Claims (9)
- 表示部と、
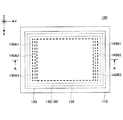
前記表示部の表示面側に配設され、操作面を有し、平面視で矩形状のトップパネルと、
前記操作面に行われる操作入力の位置を検出する位置検出部と、
前記トップパネルの一つの辺に沿って配設され、前記操作面に振動を発生させる複数の第1振動素子と、
前記トップパネルの前記一つの辺の対向辺に沿って配設され、前記操作面に振動を発生させる複数の第2振動素子と、
前記操作面を複数の領域に区分した区分領域の位置と、各区分領域で駆動する前記第1振動素子又は前記第2振動素子の識別子とを関連付けた区分領域データを格納するメモリと、
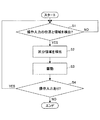
前記位置検出部によって検出される前記操作入力の位置と、前記区分領域データとに基づいて、前記操作面に超音波帯の固有振動を発生させる駆動信号で、前記複数の第1振動素子及び前記複数の第2振動素子のうちの少なくともいずれか1つを駆動する駆動制御部と
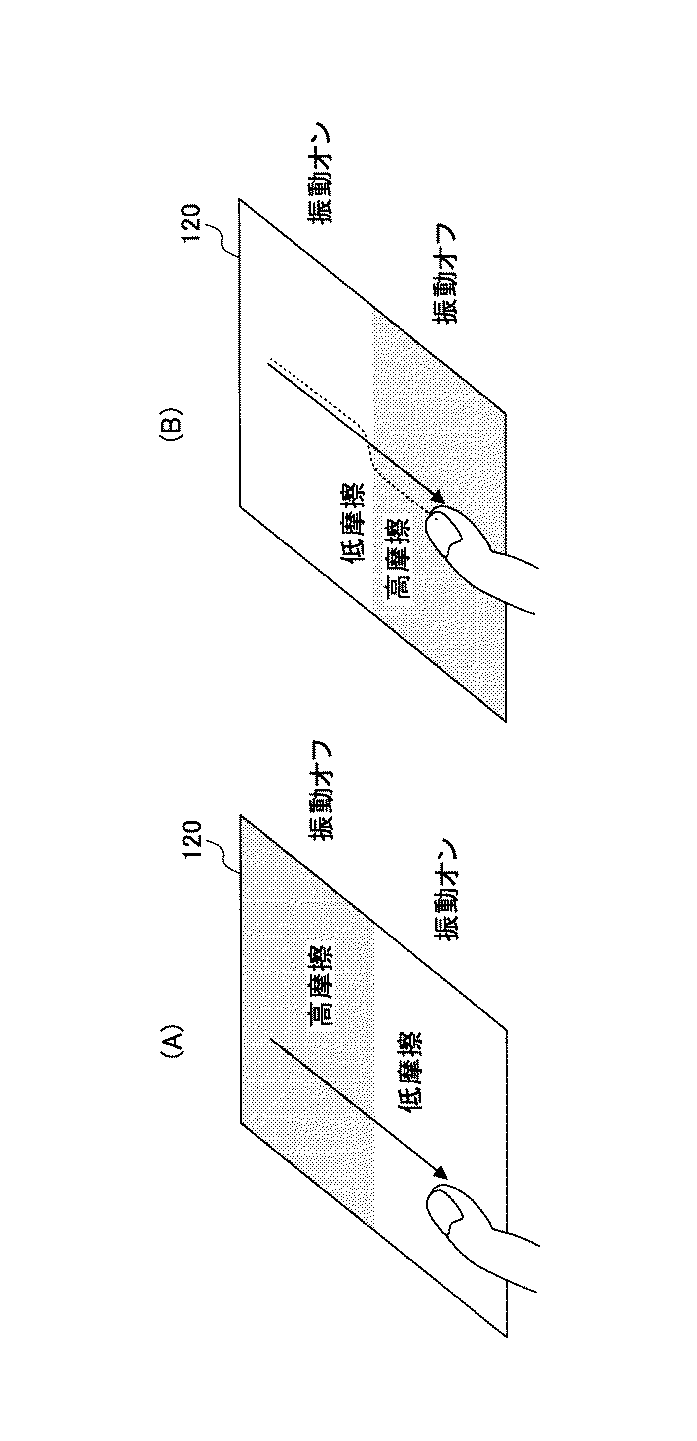
を含む、電子機器。 - 前記駆動制御部は、前記操作面への操作入力の位置及び当該位置の時間的変化度合に応じて、前記固有振動の強度が変化するように前記複数の第1振動素子及び前記複数の第2振動素子のうちの少なくともいずれか1つを駆動する、請求項1記載の電子機器。
- 前記駆動制御部は、前記操作入力の位置が、前記表示部に表示されるGUI操作部の境界を跨いで移動するときに、又は、前記GUI操作部を操作しながら移動するときに、前記固有振動の強度を変化させる、請求項2記載の電子機器。
- 前記駆動制御部は、前記操作入力の位置が、前記表示部に表示される画像のページを跨いで移動するときに、前記固有振動の強度を変化させる、請求項2又は3記載の電子機器。
- 前記駆動制御部は、前記操作入力の位置が、前記表示部に表示される所定のGUI操作部の領域内を移動するときに、前記固有振動の強度を変化させる、請求項2又は3記載の電子機器。
- 前記第1振動素子及び前記第2振動素子は、前記トップパネルの短辺に沿って配設されており、
前記駆動制御部が前記複数の第1振動素子及び前記複数の第2振動素子のうちの少なくともいずれか1つを振動させることにより、前記トップパネルの長辺の方向に振幅が変化する定在波が生じる、請求項1乃至5のいずれか一項記載の電子機器。 - 前記駆動制御部は、所定時間経過後の前記操作入力の位置を当該位置の時間的変化度合に応じて推定し、推定した操作入力の位置に応じて、前記固有振動の強度が変化するように前記第1振動素子及び前記第2振動素子を駆動する、請求項1乃至6のいずれか一項記載の電子機器。
- 前記駆動信号は、一定の周波数と一定の位相で前記操作面に超音波帯の固有振動を発生させる駆動信号である、請求項1乃至7のいずれか一項記載の電子機器。
- 表示部と、
前記表示部の表示面側に配設され、操作面を有し、平面視で矩形状のトップパネルと、
前記操作面に行われる操作入力の位置を検出する位置検出部と、
前記トップパネルの一つの辺に沿って配設され、前記操作面に振動を発生させる複数の第1振動素子と、
前記トップパネルの前記一つの辺の対向辺に沿って配設され、前記操作面に振動を発生させる複数の第2振動素子と、
前記操作面を複数の領域に区分した区分領域の位置と、各区分領域で駆動する前記第1振動素子又は前記第2振動素子の識別子とを関連付けた区分領域データを格納するメモリと
を含む電子機器の駆動制御方法であって、
前記位置検出部によって検出される前記操作入力の位置と、前記区分領域データとに基づいて、前記操作面に超音波帯の固有振動を発生させる駆動信号で前記複数の第1振動素子及び前記複数の第2振動素子のうちの少なくともいずれか1つを駆動する、駆動制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/053402 WO2015121956A1 (ja) | 2014-02-14 | 2014-02-14 | 電子機器及び駆動制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015121956A1 JPWO2015121956A1 (ja) | 2017-03-30 |
| JP6183476B2 true JP6183476B2 (ja) | 2017-08-23 |
Family
ID=53799723
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015562630A Active JP6183476B2 (ja) | 2014-02-14 | 2014-02-14 | 電子機器及び駆動制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10031585B2 (ja) |
| JP (1) | JP6183476B2 (ja) |
| WO (1) | WO2015121956A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6010012B2 (ja) * | 2013-12-03 | 2016-10-19 | 富士フイルム株式会社 | 導電シート、静電容量式タッチパネル及び表示装置 |
| WO2015121955A1 (ja) * | 2014-02-14 | 2015-08-20 | 富士通株式会社 | 電子機器、入力装置、及び駆動制御方法 |
| EP3611597B1 (en) | 2014-03-31 | 2023-06-07 | Sony Group Corporation | Tactile sense presentation device, signal generating device, tactile sense presentation system, and tactile sense presentation method |
| US20170060241A1 (en) * | 2015-08-26 | 2017-03-02 | Fujitsu Ten Limited | Input device, display device, method of controlling input device, and program |
| JP6580904B2 (ja) * | 2015-08-31 | 2019-09-25 | 株式会社デンソーテン | 入力装置、表示装置、及びプログラム |
| JP6679144B2 (ja) * | 2016-07-12 | 2020-04-15 | 株式会社デンソーテン | タッチ入力装置 |
| JP7043166B2 (ja) * | 2016-09-21 | 2022-03-29 | 株式会社デンソーテン | 表示制御装置、表示制御システム及び表示制御方法 |
| KR102655324B1 (ko) * | 2016-12-09 | 2024-04-04 | 엘지디스플레이 주식회사 | 표시 장치 |
| JP6784297B2 (ja) * | 2017-01-19 | 2020-11-11 | 富士通株式会社 | 電子機器 |
| FR3066030B1 (fr) * | 2017-05-02 | 2019-07-05 | Centre National De La Recherche Scientifique | Procede et dispositif de generation de motifs tactiles |
| US10503261B2 (en) * | 2017-12-15 | 2019-12-10 | Google Llc | Multi-point feedback control for touchpads |
| JPWO2019244716A1 (ja) * | 2018-06-19 | 2021-06-24 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| US10840905B2 (en) * | 2018-09-04 | 2020-11-17 | Tianma Japan, Ltd. | Tactile presentation device |
| KR102564250B1 (ko) * | 2018-09-11 | 2023-08-07 | 삼성디스플레이 주식회사 | 표시 장치 |
| US10908693B2 (en) | 2019-02-20 | 2021-02-02 | Wuhan Tianma Micro-Electronics Co., Ltd. | Tactile presentation device |
| JP7054794B2 (ja) * | 2019-12-09 | 2022-04-15 | パナソニックIpマネジメント株式会社 | 入力装置 |
| FR3115617B1 (fr) | 2020-10-26 | 2023-06-23 | Hap2U | Dispositif tactile à retour haptique avec textures spatialisées |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3949912B2 (ja) * | 2000-08-08 | 2007-07-25 | 株式会社エヌ・ティ・ティ・ドコモ | 携帯型電子機器、電子機器、振動発生器、振動による報知方法および報知制御方法 |
| JP2005085048A (ja) * | 2003-09-09 | 2005-03-31 | Canon Inc | 触覚提示装置及びその駆動方法 |
| JP2005258666A (ja) * | 2004-03-10 | 2005-09-22 | Sony Corp | 入力装置および電子機器並びに電子機器の感触フィードバック入力方法 |
| JP4046095B2 (ja) * | 2004-03-26 | 2008-02-13 | ソニー株式会社 | 触覚機能付き入力装置、情報入力方法及び電子機器 |
| WO2006042309A1 (en) | 2004-10-08 | 2006-04-20 | Immersion Corporation | Haptic feedback for button and scrolling action simulation in touch input devices |
| US8780053B2 (en) * | 2007-03-21 | 2014-07-15 | Northwestern University | Vibrating substrate for haptic interface |
| US9829977B2 (en) * | 2008-04-02 | 2017-11-28 | Immersion Corporation | Method and apparatus for providing multi-point haptic feedback texture systems |
| US10289199B2 (en) * | 2008-09-29 | 2019-05-14 | Apple Inc. | Haptic feedback system |
| JP5343871B2 (ja) | 2009-03-12 | 2013-11-13 | 株式会社リコー | タッチパネル装置、これを含むタッチパネル付き表示装置、及びタッチパネル装置の制御方法 |
| JP2010231609A (ja) | 2009-03-27 | 2010-10-14 | Hitachi Maxell Ltd | 触感呈示装置及び方法 |
| JP2012027855A (ja) * | 2010-07-27 | 2012-02-09 | Kyocera Corp | 触感呈示装置及び触感呈示装置の制御方法 |
| JP5697521B2 (ja) | 2011-04-07 | 2015-04-08 | 京セラ株式会社 | 文字入力装置、文字入力制御方法および文字入力プログラム |
| JP5697525B2 (ja) * | 2011-04-18 | 2015-04-08 | 京セラ株式会社 | 通信端末、サーバ、触覚フィードバック生成方法および通信システム |
| JP5689362B2 (ja) * | 2011-05-23 | 2015-03-25 | 株式会社東海理化電機製作所 | 入力装置 |
| WO2013161163A1 (ja) * | 2012-04-27 | 2013-10-31 | パナソニック株式会社 | 触感呈示装置、触感呈示方法、駆動信号生成装置および駆動信号生成方法 |
| JP5918040B2 (ja) * | 2012-06-19 | 2016-05-18 | 京セラ株式会社 | 振動装置、入力装置、表示装置、および電子機器 |
| US9330544B2 (en) * | 2012-11-20 | 2016-05-03 | Immersion Corporation | System and method for simulated physical interactions with haptic effects |
| MX338463B (es) | 2013-09-26 | 2016-04-15 | Fujitsu Ltd | Aparato de control de accionador, dispositivo electronico y metodo de control del accionador. |
| JP2015130168A (ja) * | 2013-12-31 | 2015-07-16 | イマージョン コーポレーションImmersion Corporation | 摩擦拡張制御、及び、タッチコントロールパネルのボタンを摩擦拡張制御部へと変換する方法 |
-
2014
- 2014-02-14 WO PCT/JP2014/053402 patent/WO2015121956A1/ja active Application Filing
- 2014-02-14 JP JP2015562630A patent/JP6183476B2/ja active Active
-
2016
- 2016-07-19 US US15/213,880 patent/US10031585B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015121956A1 (ja) | 2017-03-30 |
| US20160328019A1 (en) | 2016-11-10 |
| US10031585B2 (en) | 2018-07-24 |
| WO2015121956A1 (ja) | 2015-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6183476B2 (ja) | 電子機器及び駆動制御方法 | |
| JP5780368B1 (ja) | 駆動制御装置、電子機器、及び駆動制御方法 | |
| JP6447719B2 (ja) | 電子機器 | |
| WO2015121955A1 (ja) | 電子機器、入力装置、及び駆動制御方法 | |
| CN108292177B (zh) | 电子设备 | |
| WO2016163000A1 (ja) | 駆動制御装置、電子機器、駆動制御プログラム、及び駆動制御方法 | |
| JP6406025B2 (ja) | 電子機器 | |
| JPWO2015121958A1 (ja) | 電子機器、入力装置、及び電子機器の駆動制御方法 | |
| JP6123850B2 (ja) | 駆動制御装置、電子機器、及び駆動制御方法 | |
| US11086435B2 (en) | Drive control device, electronic device, and drive control method | |
| WO2015121972A1 (ja) | 駆動制御装置、電子機器、システム、及び駆動制御方法 | |
| JP6402823B2 (ja) | 駆動制御装置、電子機器、駆動制御プログラム、及び駆動制御方法 | |
| WO2016092644A1 (ja) | 電子機器及び駆動制御方法 | |
| WO2016178289A1 (ja) | 電子機器及び振動制御プログラム | |
| WO2016174760A1 (ja) | 駆動制御装置、電子機器、駆動制御プログラム、及び駆動制御方法 | |
| JP6512299B2 (ja) | 駆動制御装置、電子機器、駆動制御プログラム、及び駆動制御方法 | |
| JP6399216B2 (ja) | 駆動制御装置、電子機器、駆動制御プログラム、及び駆動制御方法 | |
| AU2015202408B2 (en) | Drive controlling apparatus, electronic device and drive controlling method | |
| JP2016161953A (ja) | 電子機器及び接触座標決定プログラム | |
| JPWO2019130504A1 (ja) | 電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170314 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170710 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6183476 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |