JP6157101B2 - ロボット装置 - Google Patents
ロボット装置 Download PDFInfo
- Publication number
- JP6157101B2 JP6157101B2 JP2012272339A JP2012272339A JP6157101B2 JP 6157101 B2 JP6157101 B2 JP 6157101B2 JP 2012272339 A JP2012272339 A JP 2012272339A JP 2012272339 A JP2012272339 A JP 2012272339A JP 6157101 B2 JP6157101 B2 JP 6157101B2
- Authority
- JP
- Japan
- Prior art keywords
- force sensor
- contact portion
- axis direction
- robot
- robot arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Manipulator (AREA)
Description
本実施形態において好適に力覚センサ2の一例として、磁気式力覚センサについて以下に説明する。
垂直方向成分Fz,Mx,Myを算出するためには、磁石の磁極面の中心に対向して配置される第1の磁電変換素子11a〜11dによって検出された垂直方向成分の磁場を用いる。第1の磁電変換素子11aの変位によって生じる出力変化を信号増幅部で増幅し、A/D変換器等を有する変換器19を用いてV1aとして検出する。同様に、第1の磁電変換素子11b〜11dについてもV1b〜V1dとする。
Mx=(V1a+V1b)−(V1c+V1d)
My=(V1b+V1c)−(V1a+V1d)
Fz, Mx, My は、演算部110で以上のように計算される。Fzは4つの素子の総変化量により算出し、MxはX軸方向に対して平行に配置した素子2組のペアの変化量によって算出し、MyはY軸方向に対して平行に配置した素子2組のペアの変化量により算出することが可能である。
水平方向成分Fx,Fy,Mzを算出するためには、第1の磁電変換素子の間にそれぞれ配置された第2の磁電変換素子12a〜12dによって検出される水平方向成分の磁場を用いる。第2の磁電変換素子12aの変位によって生じる出力変化を信号増幅部で増幅し、A/D変換器等で形成される変換器109を用いてV2aとして検出する。同様に、第2の磁電変換素子12b〜12dについてもV2b〜V2dとする。
Fy=V2a−V2c
Mz=V1a+V1b+V1c+V1d
Fx, Fy, Mz は、演算部10で以上のように計算される。FxはX軸方向に対して垂直に配置した素子のペアの変化量によって算出し、FyはY軸方向に対して垂直に配置した素子のペアの変化量によって算出し、Mzは4つの素子の総変化量により算出することが可能である。
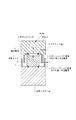
2 力覚センサ
3 ロボットハンド
4 結合部材
5 第一の当接部
6 第二の当接部
Claims (5)
- ロボットアームと、
前記ロボットアームに取り付けられている力覚センサと、
前記力覚センサに、結合部材を介して取り付けられているエンドエフェクタと、を有し、
前記ロボットアームまたは前記力覚センサから前記エンドエフェクタに向かうZ軸方向に突出する第一の当接部と、
前記エンドエフェクタから前記ロボットアームまたは前記力覚センサに向かうZ軸方向に突出する第二の当接部と、
前記ロボットアームまたは前記力覚センサから前記エンドエフェクタに向かうZ軸方向に突出する第三の当接部と、
前記エンドエフェクタから前記ロボットアームまたは前記力覚センサに向かうZ軸方向に突出する第四の当接部と、
をさらに有し、前記第一の当接部および前記第二の当接部は、前記Z軸方向と垂直なX軸方向に所定のクリアランスをもって対向して設置され、前記第三の当接部および前記第四の当接部は、前記Z軸方向および前記X軸方向と垂直なY軸方向に所定のクリアランスをもって対向して設置されていることを特徴とするロボット装置。 - 前記力覚センサは、磁束発生源と磁電変換素子を備えた磁気式の力覚センサであることを特徴とする請求項1記載のロボット装置。
- 前記第一の当接部及び前記第三の当接部は柱状構造体であることを特徴とする請求項1または2記載のロボット装置。
- 前記第一の当接部及び前記第三の当接部は、前記力覚センサの周囲に配置されていることを特徴とする請求項1乃至3いずれか一項記載のロボット装置。
- 前記結合部材は、前記力覚センサと面接触して連結される底部と、前記底部に対して径方向に突出したフランジとを有し、前記フランジと前記エンドエフェクタとが連結されていることを特徴とする請求項1乃至4いずれか一項記載のロボット装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012272339A JP6157101B2 (ja) | 2012-12-13 | 2012-12-13 | ロボット装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012272339A JP6157101B2 (ja) | 2012-12-13 | 2012-12-13 | ロボット装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014117756A JP2014117756A (ja) | 2014-06-30 |
| JP2014117756A5 JP2014117756A5 (ja) | 2016-02-04 |
| JP6157101B2 true JP6157101B2 (ja) | 2017-07-05 |
Family
ID=51173079
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012272339A Expired - Fee Related JP6157101B2 (ja) | 2012-12-13 | 2012-12-13 | ロボット装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6157101B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7206638B2 (ja) * | 2018-06-01 | 2023-01-18 | セイコーエプソン株式会社 | ロボット、制御装置およびロボットの制御方法 |
| CN110116326B (zh) * | 2019-04-30 | 2023-10-17 | 宁波海天智联科技有限公司 | 利用数控机床加工的加工件的自动化生产线 |
| JP2023083982A (ja) * | 2021-12-06 | 2023-06-16 | キヤノン株式会社 | ロボット、ロボットの制御方法、ロボットを用いた物品の製造方法、制御プログラムおよび記録媒体 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS643532A (en) * | 1987-06-26 | 1989-01-09 | Toshiba Corp | Force sensation sensor |
| JP2685363B2 (ja) * | 1991-03-25 | 1997-12-03 | 日立化成工業株式会社 | ロボットハンド取付器具 |
| JP5875382B2 (ja) * | 2011-02-15 | 2016-03-02 | キヤノン株式会社 | 力覚センサ、ロボット装置、ロボットハンド及び検出装置 |
-
2012
- 2012-12-13 JP JP2012272339A patent/JP6157101B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014117756A (ja) | 2014-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6168868B2 (ja) | 力覚センサ及び力覚センサを備えたロボットアーム | |
| US9200969B2 (en) | Force sensor | |
| JP5376859B2 (ja) | 磁気式力センサ及び磁気式力センサを有するロボットアーム | |
| JP5875382B2 (ja) | 力覚センサ、ロボット装置、ロボットハンド及び検出装置 | |
| US9095984B2 (en) | Force control robot | |
| EP2878939B1 (en) | Force detecting device, robot, eletronic component conveying apparatus | |
| JP2018059854A (ja) | 変位測定装置、ロボット、ロボットアーム及び物品の製造方法 | |
| JP2015001384A (ja) | 力検出装置、ロボット、電子部品搬送装置、電子部品検査装置、部品加工装置および移動体 | |
| JP6157101B2 (ja) | ロボット装置 | |
| WO2010079660A1 (ja) | 力覚センサ | |
| JP3168179U (ja) | 力覚センサおよび6次元力検出装置 | |
| US8952684B2 (en) | Magnetic force sensor sensing magnetic flux to calculate forces | |
| KR20180136602A (ko) | 로봇팔용 외피 구조체 | |
| JP2015087289A (ja) | センサー素子、力検出装置、ロボット、電子部品搬送装置、電子部品検査装置および部品加工装置 | |
| JP7692863B2 (ja) | 力覚センサ | |
| JP6041621B2 (ja) | センサ及びロボット装置 | |
| JP4817747B2 (ja) | 加速度センサ及びこれを装備したハードディスクドライブ並びに加速度計測方法 | |
| JP6232943B2 (ja) | 力検出装置、ロボットおよび電子部品搬送装置 | |
| Tsetserukou et al. | Design, control and evaluation of a whole-sensitive robot arm for physical human-robot interaction | |
| JP6232942B2 (ja) | 力検出装置、ロボットおよび電子部品搬送装置 | |
| JP2024013127A (ja) | 力覚センサ | |
| JP2014196921A (ja) | 力検出装置、ロボット、電子部品搬送装置、電子部品検査装置、部品加工装置および移動体 | |
| JP2015184010A (ja) | 力検出装置およびロボット | |
| JP2015087291A (ja) | 力検出装置、ロボット、電子部品搬送装置、電子部品検査装置、部品加工装置および温度補償方法 | |
| JP2015169545A (ja) | 力検出装置、ロボット、電子部品搬送装置、電子部品検査装置および部品加工装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151211 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151211 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170509 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170606 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6157101 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |