JP6152965B2 - エレベータ装置、その制御方法、及びエレベータ用遠隔地状態判定装置 - Google Patents
エレベータ装置、その制御方法、及びエレベータ用遠隔地状態判定装置 Download PDFInfo
- Publication number
- JP6152965B2 JP6152965B2 JP2016559371A JP2016559371A JP6152965B2 JP 6152965 B2 JP6152965 B2 JP 6152965B2 JP 2016559371 A JP2016559371 A JP 2016559371A JP 2016559371 A JP2016559371 A JP 2016559371A JP 6152965 B2 JP6152965 B2 JP 6152965B2
- Authority
- JP
- Japan
- Prior art keywords
- slip
- information
- car
- drive sheave
- elevator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0037—Performance analysers
Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Indicating And Signalling Devices For Elevators (AREA)
Description
この発明に係るエレベータ装置は、駆動シーブと、駆動シーブを回転させる巻上機モータとを有する巻上機、駆動シーブに巻き掛けられている懸架体、懸架体により昇降路内に吊り下げられており、巻上機モータの駆動力により昇降するかご及び釣合おもり、かごが昇降路内の検出位置にあることを検出する位置センサ、駆動シーブの回転に応じた信号を発生する回転検出器、回転検出器からの信号と位置センサからの信号とに基づいて、駆動シーブと懸架体との間の滑り量を検出する滑り検出装置、並びに滑り検出装置により検出された滑り量情報と、巻上機モータの駆動力情報と、回転検出器からの回転情報と、駆動シーブ及びそれに連動して駆動する機器の慣性質量の情報と、懸架体及びそれと連動して動作する機器の慣性質量の情報と、駆動シーブに作用するアンバランス重量の情報とに基づいて、駆動シーブと懸架体との間に生じる全域的滑りと局所的な滑りとを区別する滑り状態判定装置を備えている。
この発明に係るエレベータ装置の制御方法は、駆動シーブと、駆動シーブを回転させる巻上機モータとを有する巻上機、駆動シーブに巻き掛けられている懸架体、懸架体により昇降路内に吊り下げられており、巻上機モータの駆動力により昇降するかご及び釣合おもり、かごが昇降路内の検出位置にあることを検出する位置センサ、並びに駆動シーブの回転に応じた信号を発生する回転検出器を備えているエレベータ装置の制御方法であって、回転検出器からの信号と位置センサからの信号とに基づいて、駆動シーブと懸架体との間の滑り量を検出するステップ、検出された滑り量情報と、巻上機モータの駆動力情報と、回転検出器からの回転情報とに基づいて、駆動シーブと懸架体との間に生じる全域的滑りと局所的な滑りとを区別するステップを含む。
この発明に係るエレベータ用遠隔地状態判定装置は、駆動シーブと、駆動シーブを回転させる巻上機モータとを有する巻上機、駆動シーブに巻き掛けられている懸架体、懸架体により昇降路内に吊り下げられており、巻上機モータの駆動力により昇降するかご及び釣合おもり、かごが昇降路内の検出位置にあることを検出する位置センサ、並びに駆動シーブの回転に応じた信号を発生する回転検出器を備えているエレベータ装置の状態を判定するものであって、回転検出器からの信号と位置センサからの信号とに基づいて、駆動シーブと懸架体との間の滑り量を検出するとともに、検出した滑り量情報と、巻上機モータの駆動力情報と、回転検出器からの回転情報とに基づいて、駆動シーブと懸架体との間に生じる全域的滑りと局所的な滑りとを区別する状態判定処理装置、及び回転検出器からの信号、位置センサからの信号、及び巻上機モータの駆動力情報をエレベータ装置から受信するとともに、状態判定処理装置による処理の結果である滑り状態情報をエレベータ装置に送信する診断情報通信装置を備えている。
この発明に係るエレベータ装置は、駆動シーブと、駆動シーブを回転させる巻上機モータとを有する巻上機、駆動シーブに巻き掛けられている懸架体、懸架体により昇降路内に吊り下げられており、巻上機モータの駆動力により昇降するかご及び釣合おもり、かごが昇降路内の検出位置にあることを検出する位置センサ、駆動シーブの回転に応じた信号を発生する回転検出器、回転検出器からの信号、位置センサからの信号、巻上機モータの駆動力情報、及び、滑り状態情報を保存するエレベータ情報記憶装置、並びにエレベータ情報記憶装置に保存されている回転検出器からの信号、位置センサからの信号、巻上機モータの駆動力情報を送信し、滑り状態情報を受信するエレベータ情報通信装置を備え、エレベータ情報通信装置は、回転検出器からの信号と位置センサからの信号とに基づいて、駆動シーブと懸架体との間の滑り量を検出するとともに、検出した滑り量情報と、巻上機モータの駆動力情報と、回転検出器からの回転情報とに基づいて、駆動シーブと懸架体との間に生じる全域的滑りと局所的な滑りとを区別した結果を滑り状態情報として受信する。
実施の形態1.
図1はこの発明の実施の形態1によるエレベータ装置を示す構成図である。図において、昇降路1の上部には、機械室2が設けられている。機械室2には、巻上機3が設けられている。巻上機3は、駆動シーブ4と、駆動シーブ4を回転させる巻上機モータ5と、駆動シーブ4の回転を制動する巻上機ブレーキ6とを有している。
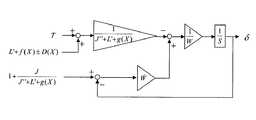
次に、この発明の実施の形態2について説明する。実施の形態2では、実施の形態1における滑り状態判定装置22での滑り挙動判定(図14の処理ステップ7−5)において、滑りを定量的に算出することで、より精度の高い滑り判断を実現する。

次に、この発明の実施の形態3について説明する。実施の形態2では、任意の一状態におけるエレベータ装置の運動方程式を基礎として滑りを推定し、滑り状態を判定する技術を示した。これに対して、実施の形態3では、さらにかご11の上下方向の位置により状態が変化することを考慮して、かご位置に応じて滑り推定処理を変更することで、滑りの推定精度を向上させる。他の構成及び動作は、実施の形態2と同様である。
次に、この発明の実施の形態4について説明する。実施の形態4では、実施の形態2又は3の滑り状態判定装置22内において算出した滑りに誤差成分が含まれる場合に、その誤差を除去して、さらに精度良い滑り挙動判断を実現する。他の構成及び動作は、実施の形態2又は3と同様である。
また、エレベータ装置全体のレイアウトは、図1のレイアウトに限定されるものではない。例えば、2:1ローピング方式のエレベータ装置、巻上機が昇降路の下部に設置されているエレベータ装置にもこの発明は適用できる。
さらに、この発明は、機械室レスエレベータ、ダブルデッキエレベータ、共通の昇降路内に複数のかごが配置されているワンシャフトマルチカー方式のエレベータなど、あらゆるタイプのエレベータ装置に適用できる。
次に、この発明の実施の形態5について説明する。実施の形態5では、特に、滑り検出及び滑り状態判定をエレベータ装置から離れた遠隔地で実施する。以下、開示する以外の構成及び動作は、実施の形態1、2、3又は4と同様である。
Claims (18)
- 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、
前記駆動シーブの回転に応じた信号を発生する回転検出器、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出する滑り検出装置、並びに
前記滑り検出装置により検出された滑り量情報と、前記巻上機モータの駆動力情報と、前記回転検出器からの回転情報とに基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別する滑り状態判定装置
を備え、
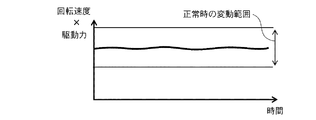
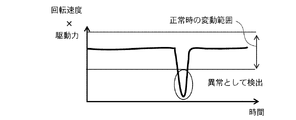
前記滑り状態判定装置は、前記駆動力情報の値と前記回転情報に基づく回転速度の値との積が予め定められた変動範囲を超えたことを検出した場合に、局所的な滑りが発生したものと判断するエレベータ装置。 - 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、
前記駆動シーブの回転に応じた信号を発生する回転検出器、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出する滑り検出装置、並びに
前記滑り検出装置により検出された滑り量情報と、前記巻上機モータの駆動力情報と、前記回転検出器からの回転情報とに基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別する滑り状態判定装置
を備え、
前記滑り状態判定装置は、前記駆動力情報の値が予め定められた許容最小偏差を下回る事象と、前記回転情報に基づく回転速度の値が予め定められた許容最大偏差を上回る事象とが同時発生したことを検出した場合に、局所的な滑りが発生したものと判断するエレベータ装置。 - 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、
前記駆動シーブの回転に応じた信号を発生する回転検出器、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出する滑り検出装置、並びに
前記滑り検出装置により検出された滑り量情報と、前記巻上機モータの駆動力情報と、前記回転検出器からの回転情報とに基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別する滑り状態判定装置
を備え、
前記滑り状態判定装置は、前記駆動力情報の最小値に基づいて回転速度の変化の許容できる許容最大値を定め、前記回転情報に基づく回転速度の値が前記許容最大値を超えたことを検出した場合に、局所的な滑りが発生したものと判断するエレベータ装置。 - 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、
前記駆動シーブの回転に応じた信号を発生する回転検出器、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出する滑り検出装置、並びに
前記滑り検出装置により検出された滑り量情報と、前記巻上機モータの駆動力情報と、前記回転検出器からの回転情報とに基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別する滑り状態判定装置
を備え、
前記滑り状態判定装置は、前記回転情報に基づく回転速度の最大値に基づいて前記駆動力情報の値の変化の許容できる許容最小値を定め、前記駆動力情報の値が前記許容最小値を下回ったことを検出した場合に、局所的な滑りが発生したものと判断するエレベータ装置。 - 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、
前記駆動シーブの回転に応じた信号を発生する回転検出器、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出する滑り検出装置、並びに
前記滑り検出装置により検出された滑り量情報と、前記巻上機モータの駆動力情報と、前記回転検出器からの回転情報と、前記駆動シーブ及び前記巻上機モータのロータを含む前記駆動シーブに連動して駆動する機器の慣性質量の情報と、前記懸架体及びそれと連動して動作する機器の慣性質量の情報と、前記駆動シーブに作用するアンバランス重量の情報とに基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別する滑り状態判定装置
を備えているエレベータ装置。 - 前記かご内の積載重量に応じた信号を発生する秤装置をさらに備え、
前記滑り状態判定装置は、前記秤装置からの信号に基づいて、前記駆動シーブに作用するアンバランス重量を算出する請求項5に記載のエレベータ装置。 - 前記位置センサは、前記昇降路内に設置されている被検出板と、前記かごに搭載されており、前記被検出板を検出する被検出板検出器とを有しており、
前記滑り状態判定装置は、前記被検出板の検出範囲の通過信号と、前記駆動シーブの回転量と、前記被検出板の検出範囲とに応じて、滑り情報を用いて滑り状態判定処理を変更する請求項5又は請求項6に記載のエレベータ装置。 - 前記滑り検出装置は、前記巻上機モータの駆動電流から前記巻上機が発生している駆動力を算出する請求項1から請求項7までのいずれか1項に記載のエレベータ装置。
- 前記滑り状態判定装置は、前記かごの位置に応じて滑り状態判定処理を変更する請求項5から請求項8までのいずれか1項に記載のエレベータ装置。
- 前記滑り状態判定装置は、前記かごの速度に応じて滑り状態判定処理を変更する請求項5から請求項8までのいずれか1項に記載のエレベータ装置。
- 前記滑り状態判定装置は、前記かごの速度及び位置に応じて滑り状態判定処理を変更する請求項5から請求項8までのいずれか1項に記載のエレベータ装置。
- エレベータ装置の状態情報をエレベータ装置の外部に伝達する伝達装置をさらに備えている請求項1から請求項11までのいずれか1項に記載のエレベータ装置。
- エレベータ装置の状態情報を前記かご内の利用者に伝達する伝達装置をさらに備えている請求項1から請求項12までのいずれか1項に記載のエレベータ装置。
- 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、並びに
前記駆動シーブの回転に応じた信号を発生する回転検出器
を備えているエレベータ装置の制御方法であって、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出するステップ、
前記巻上機モータの駆動力情報の値と前記回転検出器からの回転情報の回転速度の値との積及び検出された前記滑り量情報に基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別するステップ
を含むエレベータ装置の制御方法。 - 前記駆動シーブと前記懸架体との間の滑り量が基準量を超える場合に、前記かごを最寄り階に移動させて停止、エレベータ装置を即時停止、又はエレベータ装置の状態情報をエレベータ装置の外部に伝達するステップ
をさらに含む請求項14に記載のエレベータ装置の制御方法。 - 前記駆動シーブと前記懸架体との間の局所的な滑りが基準量を超える場合に、前記かごを最寄り階に移動させて停止、エレベータ装置を即時停止、又はエレベータ装置の状態情報をエレベータ装置の外部に伝達するステップ
をさらにを含む請求項14に記載のエレベータ装置の制御方法。 - 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが前記昇降路内の検出位置にあることを検出する位置センサ、並びに
前記駆動シーブの回転に応じた信号を発生する回転検出器
を備えているエレベータ装置の状態を判定する遠隔地状態判定装置であって、
前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出するとともに、前記巻上機モータの駆動力情報の値と前記回転検出器からの回転情報の回転速度の値との積及び検出した前記滑り量情報に基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別する状態判定処理装置、及び
前記回転検出器からの信号、前記位置センサからの信号、及び前記巻上機モータの駆動力情報を前記エレベータ装置から受信するとともに、前記状態判定処理装置による処理の結果である滑り状態情報を前記エレベータ装置に送信する診断情報通信装置
を備えているエレベータ用遠隔地状態判定装置。 - 駆動シーブと、前記駆動シーブを回転させる巻上機モータとを有する巻上機、
前記駆動シーブに巻き掛けられている懸架体、
前記懸架体により昇降路内に吊り下げられており、前記巻上機モータの駆動力により昇降するかご及び釣合おもり、
前記かごが昇降路内の検出位置にあることを検出する位置センサ、
前記駆動シーブの回転に応じた信号を発生する回転検出器、
前記回転検出器からの信号、前記位置センサからの信号、前記巻上機モータの駆動力情報、及び、滑り状態情報を保存するエレベータ情報記憶装置、並びに
前記エレベータ情報記憶装置に保存されている前記回転検出器からの信号、前記位置センサからの信号、前記巻上機モータの駆動力情報を送信し、前記滑り状態情報を受信するエレベータ情報通信装置を備え、
前記エレベータ情報通信装置は、前記回転検出器からの信号と前記位置センサからの信号とに基づいて、前記駆動シーブと前記懸架体との間の滑り量を検出するとともに、前記巻上機モータの駆動力情報の値と前記回転検出器からの回転情報の回転速度の値との積及び検出した前記滑り量情報に基づいて、前記駆動シーブと前記懸架体との間に生じる全域的滑りと局所的な滑りとを区別した結果を前記滑り状態情報として受信するエレベータ装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015108616 | 2015-05-28 | ||
| JP2015108616 | 2015-05-28 | ||
| PCT/JP2016/065201 WO2016190281A1 (ja) | 2015-05-28 | 2016-05-23 | エレベータ装置、その制御方法、及びエレベータ用遠隔地状態判定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016190281A1 JPWO2016190281A1 (ja) | 2017-06-15 |
| JP6152965B2 true JP6152965B2 (ja) | 2017-06-28 |
Family
ID=57392774
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016559371A Active JP6152965B2 (ja) | 2015-05-28 | 2016-05-23 | エレベータ装置、その制御方法、及びエレベータ用遠隔地状態判定装置 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6152965B2 (ja) |
| CN (1) | CN107614409B (ja) |
| DE (1) | DE112016002403T5 (ja) |
| WO (1) | WO2016190281A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112016006890B4 (de) * | 2016-05-23 | 2022-01-13 | Mitsubishi Electric Corporation | Aufzugseinrichtung |
| CN114040882B (zh) * | 2019-07-05 | 2023-06-27 | 三菱电机株式会社 | 电梯的控制系统 |
| EP3760559B1 (en) | 2019-07-05 | 2024-09-04 | KONE Corporation | Measurement arrangement and method of monitoring rotation speed of a component of an elevator, escalator, moving walkway or moving ramp |
| JP7161819B2 (ja) * | 2019-12-18 | 2022-10-27 | 三菱電機株式会社 | エレベータ装置 |
| CN111453582A (zh) * | 2020-04-23 | 2020-07-28 | 巨人通力电梯有限公司 | 一种基于绝对位置井道信号系统的时间限制方法 |
| CN115535760A (zh) * | 2021-03-29 | 2022-12-30 | 湖南大举信息科技有限公司 | 多轿厢智能电梯驱动轮打滑处理系统和处理方法 |
| CN115285819A (zh) * | 2022-08-16 | 2022-11-04 | 巨立电梯股份有限公司 | 一种电梯安全装置的保护系统及电梯 |
| JP7361870B1 (ja) * | 2022-11-17 | 2023-10-16 | 三菱電機ビルソリューションズ株式会社 | エレベータ遠隔点検システムおよびエレベータ遠隔点検方法 |
| JP7612925B1 (ja) | 2024-05-09 | 2025-01-14 | 東芝エレベータ株式会社 | エレベータのロープ診断装置およびエレベータのロープ診断方法 |
| WO2026061860A1 (en) * | 2024-09-17 | 2026-03-26 | Inventio Ag | A system and a method for adjusting floor offset in an elevator installation |
| JP7851440B1 (ja) | 2025-02-17 | 2026-04-24 | ジャパンエレベーターサービスホールディングス株式会社 | 速度監視装置およびエレベーター |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01178008A (ja) * | 1987-12-29 | 1989-07-14 | Hiroo Hojo | スパイクタイヤ |
| JPH0733228B2 (ja) * | 1989-08-07 | 1995-04-12 | 三菱電機株式会社 | エレベーターの異常検出装置 |
| JPH10226470A (ja) * | 1997-02-17 | 1998-08-25 | Toshiba Elevator Kk | エレベータの振動解析装置 |
| JP2000118903A (ja) * | 1998-10-12 | 2000-04-25 | Hitachi Ltd | エレベーター |
| JP2001341956A (ja) * | 2000-06-05 | 2001-12-11 | Toshiba Corp | エレベータの遠隔保守方法及び遠隔保守システム |
| WO2005115902A1 (ja) * | 2004-05-28 | 2005-12-08 | Mitsubishi Denki Kabushiki Kaisha | エレベータのロープ滑り検出装置、及びエレベータ装置 |
| CN101537955A (zh) * | 2009-04-30 | 2009-09-23 | 北京市朝阳区特种设备检测所 | 电梯无载荷曳引能力检测方法 |
| JP2014043291A (ja) * | 2012-08-24 | 2014-03-13 | Hitachi Ltd | エレベータシステム及びエレベータ制御装置 |
| JP6271956B2 (ja) * | 2013-11-12 | 2018-01-31 | 株式会社日立製作所 | エレベータ |
| JP6216238B2 (ja) * | 2013-12-06 | 2017-10-18 | 株式会社日立製作所 | エレベーター |
-
2016
- 2016-05-23 CN CN201680028194.3A patent/CN107614409B/zh active Active
- 2016-05-23 DE DE112016002403.7T patent/DE112016002403T5/de active Pending
- 2016-05-23 JP JP2016559371A patent/JP6152965B2/ja active Active
- 2016-05-23 WO PCT/JP2016/065201 patent/WO2016190281A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN107614409A (zh) | 2018-01-19 |
| DE112016002403T5 (de) | 2018-03-01 |
| JPWO2016190281A1 (ja) | 2017-06-15 |
| CN107614409B (zh) | 2019-06-21 |
| WO2016190281A1 (ja) | 2016-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6152965B2 (ja) | エレベータ装置、その制御方法、及びエレベータ用遠隔地状態判定装置 | |
| JP5675898B2 (ja) | エレベータ装置 | |
| JP6058160B2 (ja) | エレベータ装置及びその制御方法 | |
| EP2186768A1 (en) | Elevator device | |
| CN102762481A (zh) | 电梯装置 | |
| JP2011042480A (ja) | エレベータ装置 | |
| CN107207198B (zh) | 电梯的诊断装置 | |
| CN107922150B (zh) | 电梯控制系统和操作电梯系统的方法 | |
| EP2743225B1 (en) | Elevator system | |
| JP5079351B2 (ja) | エレベータ装置 | |
| JP6569807B2 (ja) | エレベーター装置 | |
| WO2022207122A1 (en) | Method and system for estimating rope slip in an elevator system | |
| CN104671022A (zh) | 电梯的控制装置及电梯的控制方法 | |
| JP2021116148A (ja) | ロープ式エレベータの摩耗検査システム、および、摩耗検査方法 | |
| CN105722782A (zh) | 对卡住的电梯轿厢或对重装置的检测 | |
| JP7155342B1 (ja) | エレベータ制御装置およびエレベータ制御方法 | |
| CN109956381B (zh) | 安全电梯系统 | |
| HK40104977A (zh) | 用於估计电梯系统中的绳索滑动的方法和系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160926 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160926 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20160926 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20161114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170418 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170516 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6152965 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |