JP6151451B2 - モバイルデバイスのための自律ロボット - Google Patents
モバイルデバイスのための自律ロボット Download PDFInfo
- Publication number
- JP6151451B2 JP6151451B2 JP2016532069A JP2016532069A JP6151451B2 JP 6151451 B2 JP6151451 B2 JP 6151451B2 JP 2016532069 A JP2016532069 A JP 2016532069A JP 2016532069 A JP2016532069 A JP 2016532069A JP 6151451 B2 JP6151451 B2 JP 6151451B2
- Authority
- JP
- Japan
- Prior art keywords
- camera
- image
- robot
- mobile device
- director
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000033001 locomotion Effects 0.000 claims description 33
- 238000000034 method Methods 0.000 claims description 32
- 238000004091 panning Methods 0.000 claims description 10
- 238000005096 rolling process Methods 0.000 claims description 8
- 230000008878 coupling Effects 0.000 claims description 2
- 238000010168 coupling process Methods 0.000 claims description 2
- 238000005859 coupling reaction Methods 0.000 claims description 2
- 230000000007 visual effect Effects 0.000 claims description 2
- 238000012545 processing Methods 0.000 description 17
- 238000004590 computer program Methods 0.000 description 13
- 230000009471 action Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 230000008901 benefit Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 238000003491 array Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 239000000835 fiber Substances 0.000 description 3
- 230000001939 inductive effect Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 210000004027 cell Anatomy 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000003032 molecular docking Methods 0.000 description 2
- 210000002569 neuron Anatomy 0.000 description 2
- 239000005022 packaging material Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- VJYFKVYYMZPMAB-UHFFFAOYSA-N ethoprophos Chemical compound CCCSP(=O)(OCC)SCCC VJYFKVYYMZPMAB-UHFFFAOYSA-N 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008520 organization Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000006748 scratching Methods 0.000 description 1
- 230000002393 scratching effect Effects 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0038—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1658—Programme controls characterised by programming, planning systems for manipulators characterised by programming language
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
- Y10S901/47—Optical
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Software Systems (AREA)
- Multimedia (AREA)
- Manipulator (AREA)
- Studio Devices (AREA)
- Electromagnetism (AREA)
Description
以下に本願発明の当初の特許請求の範囲に記載された発明を付記する。
[C1]
ロボットデバイスであって、
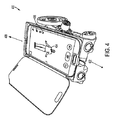
モバイルデバイスを収納するように構成された筐体と、
前記モバイルデバイスのカメラの視野とアラインされた連接画像ディレクタと
を備えるロボットデバイス。
[C2]
前記筐体は、前記連接画像ディレクタを介して前記カメラに前方視界または後向き視界を提供するための角度で配置される、
C1に記載のロボットデバイス。
[C3]
移動装置をさらに備える、C1に記載のロボットデバイス。
[C4]
前記移動装置は、少なくとも、角度がついた車輪、角度がついたトレッド、角度がついた脚、またはそれらの組み合わせを備える、C3記載のロボットデバイス。
[C5]
前記連接画像ディレクタの動きを制御するために、少なくとも1つのモータをさらに備える、C1に記載のロボットデバイス。
[C6]
前記動きを制御するために、少なくとも1つのセンサをさらに備える、C5に記載のロボットデバイス。
[C7]
前記動きは、少なくとも、ロールすること、チルトすること、パンすること、またはそれらの組み合わせを備える、C5に記載のロボットデバイス。
[C8]
前記連接画像ディレクタは、ミラーまたはライトパイプである、C1に記載のロボットデバイス。
[C9]
前記ミラーは、凸状または凹状である、C8に記載のロボットデバイス。
[C10]
前記画像ディレクタは、前記モバイルデバイスの光源とさらにアラインされる、C1に記載のロボットデバイス。
[C11]
ロボットデバイスを制御する方法であって、
前記ロボットデバイスに結合されたモバイルデバイスのカメラを介して前方方向を見ることと、
前記カメラを介してキャプチャされた被写体、前記カメラを介してキャプチャされた動き、またはそれらの組み合わせに少なくとも部分的に基づいて前記ロボットデバイスを制御することと
を備える方法。
[C12]
連接画像ディレクタは、前向き視界または後方視界を前記カメラに提供するために前記カメラとアラインされる、C11に記載の方法。
[C13]
前記連接画像ディレクタの動きを制御することをさらに備える、C12に記載の方法。
[C14]
前記動きは、少なくとも、ロールすること、チルトすること、パンすること、またはそれらの組み合わせを備える、C13に記載の方法。
[C15]
装置であって、
前記装置に結合されたモバイルデバイスのカメラを介して前方方向を見るための手段と、
前記カメラを介してキャプチャされた被写体、前記カメラを介してキャプチャされた動き、またはそれらの組み合わせに少なくとも部分的に基づいて、前記装置を制御するための手段と
を備える装置。
[C16]
見るための前記手段は、前向き視界または後方視界を前記カメラに提供するために前記カメラとアラインされる、C15に記載の装置。
[C17]
見るための前記手段の動きを制御するための手段をさらに備える、C16に記載の装置。
[C18]
前記動きは、少なくとも、ロールすること、チルトすること、パンすること、またはそれらの組み合わせを備える、C17に記載の装置。
[C19]
ロボットデバイスを制御するためのコンピュータプログラム製品であって、
非一時的なプログラムコードを記録した非一時的なコンピュータ可読媒体を備え、前記プログラムコードは、
前記ロボットデバイスに結合されたモバイルデバイスのカメラを介して前方方向を見るためのプログラムコードと、
前記カメラを介してキャプチャされた被写体、前記カメラを介してキャプチャされた動き、またはそれらの組み合わせに少なくとも部分的に基づいて前記ロボットデバイスを制御するためのプログラムコードと
を備える、コンピュータプログラム製品。
[C20]
連接画像ディレクタは、前向き視界または後方視界を前記カメラに提供するために前記カメラとアラインされる、C19に記載のコンピュータプログラム製品。
[C21]
前記プログラムコードは、前記連接画像ディレクタの動きを制御するためのプログラムコードをさらに備える、C20に記載のコンピュータプログラム製品。
[C22]
前記動きは、少なくとも、ロールすること、チルトすること、パンすること、またはそれらの組み合わせを備える、C21に記載のコンピュータプログラム製品。
Claims (19)
- ロボットデバイスであって、
モバイルデバイスを収納するように構成された筺体と、
前記モバイルデバイスの第1のカメラの視野とアラインされた、前記ロボットデバイスの前方方向の視界を前記第1のカメラに提供するための連接画像ディレクタと、ここで、前記モバイルデバイスは、前記第1のカメラによってキャプチャされた画像を、外部オペレータによって見られたときに前記画像の水平線が水平となるように、回転させるためのデローテーションソフトウェアを備える、
前記モバイルデバイスの第2のカメラによって見られるジェスチャに基づいて、前記ロボットデバイスを移動するように構成された、複数の車輪、複数のトレッド、またはそれらの組み合わせのうちの少なくとも1つと
を備え、前記第2のカメラは、前記第1のカメラが向けられている方向の逆の方向を向いている、ロボットデバイス。 - 前記複数の車輪は、角度がついた車輪を備え、前記複数のトレッドは、角度がついたトレッドを備える、請求項1記載のロボットデバイス。
- 前記連接画像ディレクタの動きを制御するために、少なくとも1つのモータをさらに備える、請求項1に記載のロボットデバイス。
- 前記連接画像ディレクタの前記動きを制御するために、少なくとも1つのセンサをさらに備える、請求項3に記載のロボットデバイス。
- 前記連接画像ディレクタの前記動きは、ロールすること、チルトすること、パンすること、またはそれらの組み合わせのうちの少なくとも1つを備える、請求項3に記載のロボットデバイス。
- 前記連接画像ディレクタは、ミラーまたはライトパイプである、請求項1に記載のロボットデバイス。
- 前記ミラーは、凸状または凹状である、請求項6に記載のロボットデバイス。
- 前記連接画像ディレクタは、前記モバイルデバイスの光源とさらにアラインされる、請求項1に記載のロボットデバイス。
- ロボットデバイスを制御する方法であって、
前記ロボットデバイスにモバイルデバイスを結合することと、
前記ロボットデバイスの前方方向の視界を第1のカメラに提供するための前記ロボットデバイスの連接画像ディレクタとアラインされた、前記モバイルデバイスの前記第1のカメラを介して前記前方方向を見ることと、
前記第1のカメラによってキャプチャされた画像を、外部オペレータによって見られたときに前記画像の水平線が水平となるように、回転させることと、
第2のカメラによって見られるジェスチャに基づいて前記ロボットデバイスを制御することと
を備え、
前記第2のカメラは、前記第1のカメラが向けられている方向の逆の方向を向いている、方法。 - 前記連接画像ディレクタの動きを制御することをさらに備える、請求項9に記載の方法。
- 前記連接画像ディレクタの前記動きは、ロールすること、チルトすること、パンすること、またはそれらの組み合わせのうちの少なくとも1つを備える、請求項10に記載の方法。
- ロボットデバイスをコンピュータが制御するための非一時的なプログラムコードを記録した非一時的なコンピュータ可読記憶媒体であって、前記プログラムコードは、前記コンピュータによって実行され、
前記ロボットデバイスに結合されたモバイルデバイスの第1のカメラを介して前記ロボットデバイスの前方方向を見るためのプログラムコードと、ここで、前記前方方向の視界は、前記前方方向の前記視界を前記第1のカメラに提供するための、前記第1のカメラの視野とアラインされた、前記ロボットデバイスの連接画像ディレクタを介して提供される、
前記第1のカメラによってキャプチャされた画像を、外部オペレータによって見られたときに前記画像の水平線が水平となるように、回転させるためのプログラムコードと、
第2のカメラによって見られるジェスチャに基づいて前記ロボットデバイスを制御するためのプログラムコードと
を備え、前記第2のカメラは、前記第1のカメラが向けられている方向の逆の方向を向いている、非一時的なコンピュータ可読記憶媒体。 - 前記プログラムコードは、前記連接画像ディレクタの動きを制御するためのプログラムコードをさらに備える、請求項12に記載の非一時的なコンピュータ可読記憶媒体。
- 前記連接画像ディレクタの前記動きは、少なくとも、ロールすること、チルトすること、パンすること、またはそれらの組み合わせを備える、請求項13に記載の非一時的なコンピュータ可読記憶媒体。
- 装置であって、
モバイルデバイスを収納するための手段と、ここで、前記収納するための手段は、前記モバイルデバイスの下の表面に対して角度をなして配置される、
前記装置の前方方向の視界を第1のカメラに提供するための、前記モバイルデバイスの前記第1のカメラの視野とアラインされた、画像方向付けするための手段と、ここで、前記モバイルデバイスは、前記第1のカメラを介してキャプチャされた画像を、外部オペレータによって見られたときに前記画像の水平線が水平となるように、回転させるためのデローテーションソフトウェアを備える、
第2のカメラによって見られるジェスチャに基づいて、前記装置に移動を提供するための手段と
を備え、前記第2のカメラは、前記第1のカメラが向けられている方向の逆の方向を向いている、装置。 - 前記画像方向付け手段の動きを制御するための手段をさらに備える、請求項15に記載の装置。
- 前記画像方向付け手段の前記動きをさらに制御するために、検知するための手段さらに備える、請求項16に記載の装置。
- 前記画像方向付け手段の前記動きは、ロールすること、チルトすること、パンすること、またはそれらの組み合わせのうちの少なくとも1つを備える、請求項17に記載の装置。
- 前記複数の車輪は、第1のセットの車輪および第2のセットの車輪を備え、前記第1のセットの車輪の直径は、前記第2のセットの車輪の直径よりも大きい、請求項1記載のロボットデバイス。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361906852P | 2013-11-20 | 2013-11-20 | |
| US61/906,852 | 2013-11-20 | ||
| US14/448,940 US9501056B2 (en) | 2013-11-20 | 2014-07-31 | Autonomous robot for a mobile device |
| US14/448,940 | 2014-07-31 | ||
| PCT/US2014/064126 WO2015077025A1 (en) | 2013-11-20 | 2014-11-05 | Autonomous robot for a mobile device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017505559A JP2017505559A (ja) | 2017-02-16 |
| JP2017505559A5 JP2017505559A5 (ja) | 2017-03-23 |
| JP6151451B2 true JP6151451B2 (ja) | 2017-06-21 |
Family
ID=53174113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016532069A Expired - Fee Related JP6151451B2 (ja) | 2013-11-20 | 2014-11-05 | モバイルデバイスのための自律ロボット |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9501056B2 (ja) |
| EP (1) | EP3071371A1 (ja) |
| JP (1) | JP6151451B2 (ja) |
| KR (1) | KR101793396B1 (ja) |
| CN (1) | CN105873731B (ja) |
| CA (1) | CA2927218A1 (ja) |
| WO (1) | WO2015077025A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101281806B1 (ko) * | 2012-12-28 | 2013-07-04 | (주) 퓨처로봇 | 퍼스널 로봇 |
| WO2017192868A1 (en) | 2016-05-04 | 2017-11-09 | Wal-Mart Stores, Inc. | Distributed autonomous robot systems and methods |
| SE540459C2 (en) * | 2016-11-22 | 2018-09-18 | Unibap Ab | Measuring system and method of an industrial robot |
| WO2019021915A1 (ja) * | 2017-07-27 | 2019-01-31 | 京セラ株式会社 | 飛行体、携帯電子機器、セキュリティシステム及び電話システム |
| JP6678715B2 (ja) * | 2018-09-20 | 2020-04-08 | 株式会社バンダイ | コンピュータプログラム、移動装置、及び移動装置システム |
| JP7252255B2 (ja) * | 2018-11-08 | 2023-04-04 | ヤマハ発動機株式会社 | 車両 |
| KR102231902B1 (ko) * | 2019-04-15 | 2021-03-29 | 한국타이어앤테크놀로지 주식회사 | 물류 처리 주행 장치 |
| WO2020220158A1 (zh) * | 2019-04-28 | 2020-11-05 | 深圳市大疆创新科技有限公司 | 一种无人机的控制方法、无人机及计算机可读存储介质 |
| KR102282415B1 (ko) * | 2019-12-11 | 2021-07-26 | 한국기술교육대학교 산학협력단 | 사용자 단말기를 수용하는 로봇 |
| JP7149977B2 (ja) * | 2020-03-16 | 2022-10-07 | 株式会社バンダイ | コンピュータプログラム、移動装置、及び移動装置システム |
| US12311550B2 (en) * | 2020-12-31 | 2025-05-27 | Sarcos Corp. | Smart control system for a robotic device |
| JP7571597B2 (ja) | 2021-02-15 | 2024-10-23 | トヨタ自動車株式会社 | 運搬システム |
| JP7563219B2 (ja) | 2021-02-15 | 2024-10-08 | トヨタ自動車株式会社 | 運搬システム |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4386848A (en) * | 1980-08-11 | 1983-06-07 | Martin Marietta Corporation | Optical target tracking and designating system |
| US7182025B2 (en) * | 2001-10-17 | 2007-02-27 | William Marsh Rice University | Autonomous robotic crawler for in-pipe inspection |
| JP2005017569A (ja) * | 2003-06-25 | 2005-01-20 | Nec Saitama Ltd | カメラ付き携帯電話機 |
| US20130019019A1 (en) | 2004-11-15 | 2013-01-17 | Peter Ar-Fu Lam | Cloud servicing system configured for servicing smart phone or touch pad circuit applications and consumer programmable articles |
| JP2010034652A (ja) * | 2008-07-25 | 2010-02-12 | Nippon Computer:Kk | 多方位カメラ搭載型携帯端末装置 |
| KR20110123630A (ko) | 2010-05-07 | 2011-11-15 | 김제민 | 셀프 카메라 기능 부여용 핸드폰 거치대 |
| US9014848B2 (en) | 2010-05-20 | 2015-04-21 | Irobot Corporation | Mobile robot system |
| US8935005B2 (en) | 2010-05-20 | 2015-01-13 | Irobot Corporation | Operating a mobile robot |
| JP2012056001A (ja) | 2010-09-08 | 2012-03-22 | Fit:Kk | ロボット制御システム |
| US8588972B2 (en) | 2011-04-17 | 2013-11-19 | Hei Tao Fung | Method for creating low-cost interactive entertainment robots |
| TW201245931A (en) | 2011-05-09 | 2012-11-16 | Asustek Comp Inc | Robotic device |
| KR20120129230A (ko) | 2011-05-19 | 2012-11-28 | 엘지디스플레이 주식회사 | 스마트폰 로봇 |
| CN202050467U (zh) * | 2011-05-20 | 2011-11-23 | 邓英鹏 | 一种可通话的远程控制小车 |
| JP4972218B1 (ja) * | 2011-08-12 | 2012-07-11 | 株式会社バンダイ | 動作体玩具 |
| KR101247150B1 (ko) | 2012-06-04 | 2013-04-02 | 곽병재 | 촬영보조 수단을 구비한 스마트폰 케이스 |
| US9518821B2 (en) | 2012-08-02 | 2016-12-13 | Benjamin Malay | Vehicle control system |
| US9031698B2 (en) | 2012-10-31 | 2015-05-12 | Sarcos Lc | Serpentine robotic crawler |
| DE202012104592U1 (de) * | 2012-11-27 | 2012-12-17 | Matthias Rapp | Halterung für ein mobiles Kommunikationsgerät |
-
2014
- 2014-07-31 US US14/448,940 patent/US9501056B2/en not_active Expired - Fee Related
- 2014-11-05 JP JP2016532069A patent/JP6151451B2/ja not_active Expired - Fee Related
- 2014-11-05 CA CA2927218A patent/CA2927218A1/en not_active Abandoned
- 2014-11-05 WO PCT/US2014/064126 patent/WO2015077025A1/en active Application Filing
- 2014-11-05 CN CN201480063323.3A patent/CN105873731B/zh not_active Expired - Fee Related
- 2014-11-05 KR KR1020167014640A patent/KR101793396B1/ko not_active Expired - Fee Related
- 2014-11-05 EP EP14803285.7A patent/EP3071371A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| CA2927218A1 (en) | 2015-05-28 |
| KR20160088326A (ko) | 2016-07-25 |
| CN105873731A (zh) | 2016-08-17 |
| CN105873731B (zh) | 2018-03-20 |
| EP3071371A1 (en) | 2016-09-28 |
| US20150142252A1 (en) | 2015-05-21 |
| KR101793396B1 (ko) | 2017-11-02 |
| WO2015077025A1 (en) | 2015-05-28 |
| JP2017505559A (ja) | 2017-02-16 |
| US9501056B2 (en) | 2016-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6151451B2 (ja) | モバイルデバイスのための自律ロボット | |
| CN103345301B (zh) | 一种深度信息获取方法和装置 | |
| US10071645B2 (en) | Autonomous vehicle charging station connection | |
| KR20140088461A (ko) | 착용식 비디오 장치 및 이를 구비하는 비디오 시스템 | |
| CN109460074B (zh) | 一种音频设备定向显示方法、装置和音频设备 | |
| CN107703933A (zh) | 机器人的充电方法、装置和设备 | |
| CN110091866B (zh) | 泊车路径获取方法及装置 | |
| CN102681958A (zh) | 使用物理姿势传输数据 | |
| US9363353B1 (en) | Mobile phone docks with multiple circulating phone connectors | |
| CN109991970A (zh) | 机器人的充电控制方法及机器人 | |
| CN108233465B (zh) | 无线充电控制方法、柔性终端及计算机可读存储介质 | |
| CN108271012A (zh) | 一种深度信息的获取方法、装置以及移动终端 | |
| CN109218481B (zh) | 成像模组、终端设备及变焦方法 | |
| CN110097736A (zh) | 报警方法及报警装置 | |
| CN110545387A (zh) | 一种拍摄方法及终端设备 | |
| US10017024B2 (en) | Tablet computer-based robotic system | |
| CN105108763A (zh) | 对物品进行三维重建信息采集的系统 | |
| CN111168691A (zh) | 机器人控制方法、控制系统以及机器人 | |
| CN106671101A (zh) | 一种智能拍摄机器人 | |
| CN114285119A (zh) | 连接的方法、充电装置、终端及非暂时性存储介质 | |
| KR102688911B1 (ko) | 장착된 외부 전자 장치의 기능과 관련된 동작을 수행하는 전자 장치 및 방법 | |
| US9501059B2 (en) | Pocket robot | |
| Satoh et al. | A secure and reliable next generation mobility—An intelligent electric wheelchair with a stereo omni-directional camera system— | |
| US20230311332A1 (en) | Thin mobile communication terminal, and control method and control program thereof | |
| US20200160557A1 (en) | Information processing device, information processing method, recording medium, and image capturing apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170117 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170117 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170117 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170330 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170425 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170524 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6151451 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |