JP6135662B2 - 車両用制動支援装置及び車両用制動支援方法 - Google Patents
車両用制動支援装置及び車両用制動支援方法 Download PDFInfo
- Publication number
- JP6135662B2 JP6135662B2 JP2014262693A JP2014262693A JP6135662B2 JP 6135662 B2 JP6135662 B2 JP 6135662B2 JP 2014262693 A JP2014262693 A JP 2014262693A JP 2014262693 A JP2014262693 A JP 2014262693A JP 6135662 B2 JP6135662 B2 JP 6135662B2
- Authority
- JP
- Japan
- Prior art keywords
- braking force
- braking
- vehicle
- disturbance
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Description
本発明は、上記のような点に着目してなされたもので、自車両進行方向の障害物に対する運転者の支援を、運転者の意図に応じてより適切に実施することを目的とする。
この結果、自車両進行方向の障害物に対する運転者の支援を、運転者の意図に応じてより適切に実施することが可能となる。
次に、第1実施形態について図面を参照して説明する。
図1は、本実施形態における自車両MMのシステム構成を示す図である。
すなわち、自車両MMは、車輪速センサ1と、障害物情報検出センサ2と、アクセル開度センサ3と、スロットル開度センサ4と、シフトポジションセンサ5と、アクセルペダル反力付与装置11と、スロットル開度制御部21、コントローラ20及び不図示のトランスミッションを介して車輪に駆動力を付与する、車両の駆動源としてのエンジン23とを備える。
障害物情報検出センサ2は、自車両の進行方向である自車両前方に位置する障害物XMを検出して検出した障害物XMの情報をコントローラ20に出力する。障害物情報検出センサ2は、例えば自車両前方にレーザー光を出射すると共に反射光を受光し、そのレーザー光の出射から反射光の受光までの時間を検出してコントローラ20に出力するレーザーレーダーである。なお本実施形態においては、この障害物情報検出センサ2をレーザーレーダーとして記載するが、例えばミリ波レーダーやカメラ等の車両前方の障害物XMの情報を検出できるものであれば適宜変更可能である。
スロットル開度センサ4は、エンジン23のスロットル開度を検出し、検出したスロットル開度をコントローラ20に出力する。
シフトポジションセンサ5は、トランスミッション(不図示)のシフトポジション(トランスミッションの変速段若しくは変速比)を検出し、検出したシフトポジションをコントローラ20に出力する。
上記制動流体圧制御部29、流体圧回路27が、後述の制動力付与装置9を構成する。なお、制動力付与装置9は、油圧によって制動を付与する構成に限定しない。制動付与装置は、電動ブレーキなどから構成されていても良い。
コントローラ20は、自車両・障害物情報取得部6と、支援情報演算部7と、制動力演算部8と、アクセルペダル反力演算部10とを備える。
図3は、本実施形態の自車両・障害物情報取得部6の構成を説明する図である。
自車両・障害物情報取得部6は、図3に示すように、自車速演算部6Aと、自車加減速度演算部6Bと、障害物情報演算部6Cと、エンジントルク検出部6Dと、自車両・障害物情報出力部6Eを備える。
支援情報演算部7は、図4に示すように、リスクポテンシャル演算部7Aと、外乱推定部7Bと、支援情報出力部7Cとを備える。
リスクポテンシャル演算部7Aは、上記自車両・障害物情報取得部6の自車両・障害物情報出力部6Eから入力した自車両・障害物情報に基づいてリスクポテンシャルを表わす値として自車両MMの前方の障害物XMに対する接近度合いを算出する。具体的には、前方の障害物XMの位置に自車両MMが到達するのに要する到達時間TTCを自車両MMの前方の障害物XMに対する接近度合いとして算出し、算出した到達時間TTCを上記支援情報出力部7Cに出力する。
TTC = D_tar/V_tar ・・・(1)
ここで、
D_tar:障害物XMとの相対距離
V_tar:障害物XMとの相対速度
である。
そして、上記リスクポテンシャル演算部7Aは、上記自車両・障害物情報取得部6から障害物XMとの相対距離D_tar[m]、障害物XMとの相対速度V_tar[m/s]を入力し、上記(1)式によって、リスクポテンシャルを表わす値としての到達時間TTCを演算する。
本実施形態の外乱推定部7Bは、上記自車両・障害物情報取得部6から自車両MMの加減速度A[m/s2]を入力すると共に、上記制動力演算部8から前回処理時の第1制動力付与判断結果と制動力指令値P_brk[Mpa]を入力する。
外乱推定値SUBの演算は、下記(2)式によって演算する。
SUB = |(A / P_brk) * ARMYU| ・・・(2)
また、外乱推定値SUBの演算が行われなかった場合は、外乱推定値SUBを初期値である「1」に設定する。
上記外乱は、車両に制動力を付与する際の制動トルク伝達率、路面摩擦係数、車両重量の少なくとも1つを含む外乱である。摩擦ブレーキによって車輪を介して制動力を自車両MMに付与する場合には、車両に制動力を付与する際の制動トルク伝達率は、例えばブレーキパッドの摩擦係数などが対応する。
支援情報出力部7Cは、上記自車両・障害物情報取得部6と、上記リスクポテンシャル演算部7A及び外乱推定部7Bから入力した情報を、上記制動力演算部8とアクセルペダル反力演算部10に出力する。
制動力演算部8は、図5に示すように、第1閾値設定部8Aと、第1制動力付与判断部8Bと、第1制動量演算部8Cと、第1制動力指令値演算部8Dと、第2閾値設定部8Eと、第2制動力付与判断部8Fと、第2制動量演算部8Gと、第2制動力指令値演算部8Hと、制動力指令値選択部8Jと、を備える。
例えば、1の閾値Th1としての到達時間閾値TTC1は、下記(3)式で演算する。
TTC1 = TTC1_0 ×(1/SUB) ・・・(3)
第1制動力付与判断部8Bは、上記支援情報演算部7から入力した到達時間TTCが、上記第1閾値設定部8Aで設定された到達時間閾値TTC1未満であり、かつ上記支援情報演算部7より入力したアクセル開度が予め設定した所定の値(所定のアクセル開度)よりも小さい場合は、第1制動力を付与すると判断する。言い換えれば、自車両MMの障害物XMに対するリスクポテンシャルが第1の閾値Th1より大きい場合(到達時間TTCが到達時間閾値TTC1未満である場合)であって、かつアクセル開度が予め設定した所定の値よりも小さい場合は第1制動力を付与すると判断する。上記条件を満足しない場合には第1制動力を付与しないと判断する。すなわち、自車両MMの障害物XMに対するリスクポテンシャルが第1の閾値Th1より大きい場合(到達時間TTCが到達時間閾値TTC1未満である場合)であっても、かつアクセル開度が予め設定した所定の値以上である場合には、第1制動力を付与しないと判断する。
第1制動量演算部8Cは、上記第1制動力付与判断部8Bの制動力付与判断結果に基づいて、減速度の目標値としての第1制動量DEC1を設定する。上記第1制動力付与判断部8Bで第1制動力を付与すると判断した場合は、予め設定した所定の増加率αで、所定の減速量DEC1_0[m/s2]まで第1制動量DEC1[m/s2]を増加して設定する。具体的には増加率αは2.5[m/s3]、DEC1_0は2.5[m/s2]とする。
第1制動量DEC1=α×t
但し、第1制動量DEC1≦DEC1_0
として第1制動量DEC1を設定する。なお、上記tは第1制動量演算部8Cの第1制動量DEC1の算出開始からの経過時間を表わす。
また第1制動量演算部8Cは、上記第1制動力付与判断部8Bで第1制動力付与しないと判断された場合は、第1制動量DEC1[m/s2]を「0」に設定する。
上記第1制動力指令値演算部8Dは、まず、上記外乱推定部7Bにて演算された外乱推定値SUBが小さい値であるほど(制動を妨げる外乱が大きいほど)大きくなるように制動量制動力変換係数補正ゲインα_armyu1を設定する。そして、第1制動力指令値演算部8Dは、上記第1制動量演算部8Cにて演算された第1制動量DEC1[m/s2]に基づき、下記(4)式を用いて制動力指令値P_brk1[Mpa]を演算する。
P_brk1 =DEC1 × ARMYU ×α_armyu1 ・・・(4)
ここで、制動量制動力変換係数ARMYUは、上述の通り制動力指令値(すなわち減速度の目標値)を液圧値に変換するための係数であって、車両の諸元等から設定された値であり、例えばARMYUは0.8とする。
第2閾値設定部8Eは、上記支援情報演算部7から入力した外乱推定値SUBに基づき、外乱推定値SUBが小さい(自車両MMの制動を妨げる外乱の度合いが大きい)ほど、到達時間閾値TTC2が大きくなるように到達時間閾値TTC2を設定する。
例えば、到達時間閾値TTC2は、下記(5)式で演算する。
TTC2 = TTC2_0 ×(1/SUB) ・・・(5)
第2制動力付与判断部8Fは、上記支援情報演算部7から入力した到達時間TTCが、上記第2閾値設定部8Eで設定された到達時間閾値TTC2未満である場合は第2制動力を付与すると判断する。言い換えれば、自車両MMの障害物XMに対するリスクポテンシャルが第2の閾値Th2より大きい場合(到達時間TTCが到達時間閾値TTC2未満で有る場合)は第2制動力を付与すると判断する。また、上記条件を満足しない場合には、第2制動力を付与しないと判断する。
上記第2制動量演算部8Gは、上記第2制動力付与判断部8Fの制動力付与判断結果に基づいて、減速度の目標値としての第2制動量DEC2を設定する。上記第2制動力付与判断部8Fで第2制動力付与すると判断された場合は、予め設定した所定の増加率βで、予め設定した所定の減速量であるDEC2_0[m/s2]まで第2制動量DEC2[m/s2]を増加して設定する。
第2制動量DEC2=β×t
但し、第2制動量DEC2≦DEC2_0
として第2制動量DEC2を設定する。なお、上記tは第2制動量演算部8Gの第2制動量DEC2の算出開始からの経過時間を表わす。
また、上記第2制動量演算部8Gは、上記第2制動力付与判断部8Bで第2制動力付与しないと判断された場合は、第2制動量DEC2[m/s2]を「0」に設定する。具体的には例えば上記増加率βは10.0[m/s3]、DEC2_0は5.0[m/s2]とする。
上記第2制動力指令値演算部8Hは、まず、上記外乱推定部7Bにて演算された外乱推定値SUBが小さい値であるほど大きくなるように制動量制動力変換係数補正ゲインα_armyu2を設定する。そして、第2制動力指令値演算部8Hは、上記第2制動量演算部8Gにて演算された第2制動量DEC2[m/s2]に基づき、下記(6)式を用いて制動力指令値P_brk2[Mpa]を演算する。
P_brk2 =DEC2 × ARMYU ×α_armyu2 ・・・(6)
また、上記制動量制動力変換係数補正ゲインα_armyu2は、0.8を下限、1.2を上限として外乱推定値SUBの逆数を代入して設定する。
P_brk =MAX(P_brk1、P_brk2) ・・・(7)
アクセルペダル反力演算部10は、図6に示すように、第3閾値設定部10Aと、ペダル反力付与判断部10Bと、ペダル反力量演算部10Cと、アクセルペダル反力指令値演算部10Dとを備える。
第3閾値設定部10Aは、アクセルペダル反力付与判断を行うためのリスクポテンシャルである第3の閾値Th3として、到達時間閾値TTC3を設定する。
本実施形態の第3閾値設定部10Aは、予め設定した所定の値である到達時間TTC3_0に対し、外乱推定値SUBが小さい値であるほど大きくなるように補正を行って第3到達時間閾値TTC3を求める。そして、到達時間がTTC3を設定する。具体的にはTTC3_0は3とし、TTC3は補正処理によって2.5〜3.5の間で設定する。
TTC3 = TTC3_0 ×(1/SUB) ・・・(8)
ここで、到達時間閾値TTC3は、到達時間閾値TTC2よりも大きくなるように設定する。更には、到達時間閾値TTC3は、到達時間閾値TTC1以上に設定することが好ましい。到達時間閾値TTC3を、到達時間閾値TTC1以上に設定する場合には、TTC3 =TTC1+TTC4と設定しても良い。但しTTC4はゼロ以上の予め定められた任意の値とする。
上記支援情報演算部7から入力した到達時間TTCが、上記第3閾値設定部8Aで設定された到達時間閾値TTC3未満である場合、アクセルペダル反力を付与すると判断する。言い換えれば、自車両MMの障害物XMに対するリスクポテンシャルが第3の閾値Th3より大きい場合(到達時間TTCが到達時間閾値TTC3未満である場合)はアクセルペダル反力を付与すると判断する。一方、上記条件を満足しない場合には、アクセルペダル反力を付与しないと判断する。
上記ペダル反力量演算部10Cは、アクセル開度が大きくほど大きくなるようにアクセルペダル反力量を演算する。具体的には、20〜25[N]の間でペダル反力量を演算する。なお、このアクセルペダル反力量は、運転者が意図してアクセルペダルを操作する場合には操作が可能であり、且つ運転者がアクセルペダル反力の変化を認識できる反力量である。
本実施形態のアクセルペダル反力指令値は、上記ペダル反力付与判断部10Bでアクセルペダル反力を付与すると判断された後、上記ペダル反力量演算部10Cで演算されたアクセルペダル反力量まで予め設定した所定の増加率でアクセルペダル反力指令値を増加していき、アクセルペダル反力指令値がアクセルペダル反力量まで達した後は上記支援情報演算部7から入力するアクセル開度が0になるまでアクセルペダル反力指令値を保持する。
具体的には、例えばアクセルペダル反力指令値の増加率を7.5[N/sec]、減少率を30[N/sec]とする。
距離 = 空走距離 + 減速距離 + マージン距離 ・・・(9)
ここで、空走距離は例えば障害物XMとの相対速度V_tarに所定の初期空走時間を乗算した値とする。具体的には初期空走時間は1[sec]とする。
減速距離 =(相対速度V_tar)
+(想定減速度2)/(想定減速度変化率×2)/(想定減速度×2)
− (想定減速度)3 / (想定減速度変化率2×6)・・・(10)
具体的には例えば想定減速度は5[m/s2]、想定減速度変化率は10[m/s2]とする。また、マージン距離は具体的には例えば3[m]とする。
また、ここでは想定減速度を所定の値としたが、上記自車両・障害物情報取得部6から受け取った自車両MM加減速度に基づいて減速距離を演算してもよい。
制動力演算部8の処理は、予め設定したサンプリング周期で実施され、先ずステップS10にて、支援情報演算部7から演算に必要な外乱推定値SUBやリスクポテンシャル等の情報を取得する。
次に、ステップS20では、第1閾値設定部8Aが第1の閾値Th1を設定する。
次に、ステップS30では、第1制動力付与判断部8Bが、自車両MMの前方の障害物XMに対するリスクポテンシャルが、第1の閾値Th1で表されるリスクポテンシャルよりも高いか否かを判定する。具体的には到達時間TTCが到達時間閾値TTC1未満であるか否かを判定する。条件を満足する場合にはステップS40に移行する。条件を満足しない場合には、ステップS60に移行する。
ステップS50では、第1制動量演算部8Cが第1制動量を演算する。その後ステップS70に移行する。
ステップS60では、第1制動量演算部8Cが第1制動量に「0」を設定する。その後ステップS70に移行する。
ステップS70では、第1制動力指令値演算部8Dが、第1制動量に基づき第1制動力指令値を演算する。
次に、ステップS90では、第2制動力付与判断部8Fが、自車両MMの前方の障害物XMに対するリスクポテンシャルが、第2の閾値Th2で表されるリスクポテンシャルよりも高いか否かを判定する。具体的には、到達時間TTCがTTC2未満であるか否かを判定する。条件を満足する場合にはステップS100に移行する。条件を満足しない場合には、ステップS110に移行する。
ステップS110では、第2制動量演算部8Gが第2制動量に「0」を設定する。その後ステップ120に移行する。
ステップS120では、第2制動力指令値演算部8Hが、第2制動量に基づき第2制動力指令値を演算する。
次にステップS130では、制動力指令値選択部8Jが、第1制動力指令値と第2制動力指令値のうち大きい方を最終的な制動力指令値として選択する。
次にステップS140では、制動力指令値選択部8JがステップS130で選択された制動力指令値を制動力付与装置9(制動流体圧制御部29)に出力する。その後、復帰する。
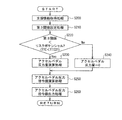
アクセルペダル反力演算部10の処理は、予め設定したサンプリング周期で実施され、先ずステップS200にて、支援情報演算部7から演算に必要な外乱推定値SUBや到達時間TTC等の情報を取得する。
次に、ステップS210では、第3閾値設定部10Aが第3の閾値Th3の設定を行う。
次に、ステップS220では、ペダル反力付与判断部が10Bが、自車両MMの前方の障害物XMに対するリスクポテンシャルが、第3の閾値Th3で表されるリスクポテンシャルよりも高いか否かを判定する。具体的には、到達時間TTCが到達時間閾値TTC3未満であるか否かを判定する。条件を満足する場合にはステップS230に移行する。条件を満足しない場合には、ステップS240に移行する。
ステップS240では、ペダル反力量演算部10Cが、アクセルペダル反力量を「0」に設定した後、ステップS250に移行する。
ステップS250では、アクセルペダル反力指令値演算部10Dが、ペダル反力指令値を演算し、続いてステップS260にて、演算したペダル反力指令値をアクセルペダル反力付与装置11に出力する。その後、復帰する。
図9は、具体的な数値の例を付加した、上記本実施形態におけるタイムチャートの例である。
図9に示すように、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第3の閾値Th3で表されるリスクポテンシャルよりも高くなると、すなわち到達時間TTCが到達時間閾値TTC3未満になると(時刻t1)、アクセルペダル反力を付与することで、運転者にアクセルペダルを戻す操作を促す。
このように、第1制動力付与手段はアクセルペダル22が操作されていない場合にのみ制動力を付与する。このように、運転者が加速意図のない場合のみ制動力を付与することで、制動力を付与しても違和感の少ない走行シーンでのみ制動による支援を行うことができる。
これによって、アクセル操作の有無に関わらず第2制動力指令値による制動を行うことで、確実に制動力を付与して、運転者の運転操作を支援することができる。
また、障害物XMに対する接近度合いである障害物XMとの相対距離D_tar、障害物XMとの相対速度V_tarを検出し、障害物XMとの相対速度V_tarで除算した値である到達時間TTCをリスクポテンシャルを表わす値とすることで、より運転者に違和感の少ないタイミングで運転支援を行うことができる。
また、外乱推定部7Bで第1制動力指令値に基づき制動力を付与している際に外乱を推定することにより、第2制動力指令値に基づく制動力に関する外乱をより正確に推定することができる。すなわち、より第2制動力指令値に基づく制動力を付与するタイミングに近い、第1制動力指令値に基づき制動力を付与している際の外乱に基づいて第2の閾値Th2(到達時間閾値TTC2)および制動力指令値P_brk2を補正することにより、より適切に第2制動力付与手段による制動力付与を行なうことができる。
(1)リスクポテンシャル算出手段は、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルを算出する。第1制動力付与手段は、上記算出したリスクポテンシャルが、予め設定した第1の閾値よりも高く、且つペダル検出手段の検出に基づきアクセルペダルが操作されていないと判定すると、自車両MMに制動力を付与する。第2制動力付与手段は、上記リスクポテンシャル算出手段が算出したリスクポテンシャルが、第1の閾値よりも高い第2の閾値より高いと判定すると、アクセルペダルの操作状態に関わらず自車両MMに制動力を付与する。
この結果、自車両前方の障害物XMに対する制動による運転支援を、運転者の意図に応じてより適切に実施することが可能となる。
これによって、障害物XMに対するリスクを認識していない運転者に対してアクセルペダル反力を付与することにより、リスクポテンシャルが高いことを運転者に報知すると共に、アクセルペダルを放す操作を促して運転を支援することが出来る。
第3の閾値で表されるリスクポテンシャルを第1の閾値で表されるリスクポテンシャル以下の値とすることにより、第1制動力指令値に基づく制動付与開始と同時期、若しくは早いタイミングでアクセル反力を付与することが可能となる。この結果、運転者の意図を確認した上で、第1制動力指令値に基づく制動付与開始を行うことが可能となる。
障害物XMに対する接近度合いをリスクポテンシャルを表わす値とすることで、運転者の感覚に合った違和感の無い適切な支援を行うことが可能となる。
障害物XMとの相対距離、相対速度、及び相対加減速度のうちの少なくとも1つに基づいて接近度合いを算出することで、物理量に基づいてリスクポテンシャルを求めることとなり、運転者の感覚により近いリスクポテンシャルを設定することが可能となる。
障害物XMとの到達時間に基づくリスクポテンシャルによって支援可否の判定することにより、より運転者に違和感の少ないタイミングで支援を行うことが可能となる。
外乱により制動が妨げられるような状況ではより早いタイミングで支援を行うことができ、外乱により制動が助長されるような状況ではより遅いタイミングで支援を行うことができ、外乱に対応して適切なタイミングで運転支援を行うことが可能となる。
外乱により制動が妨げられるような状況ではより早いタイミングで支援を行うことができ、外乱により制動が助長されるような状況ではより遅いタイミングで支援を行うことができ、外乱に対応して適切なタイミングで運転支援を行うことが可能となる。
外乱により制動が妨げられる、もしくは助長されるような状況では、それに応じた制動量で支援を行うことが可能となる。
外乱により制動が妨げられる、もしくは助長されるような状況では、それに応じたアクセルペダル反力で支援を行うことが可能となる。
上記第1制動力付与手段によって制動力を付与している時に求めた外乱に応じて、第2の閾値、及び第1制動力付与手段による制動力の少なくとも一方を補正することで、リスクポテンシャルが第2の閾値よりも高い状態における、第2制動力付与手段による制動付与をより適正なタイミングで開始する、もしくは第1制動力付与手段による制動力をより適切な値とすることが可能となる。
(12)上記外乱推定手段は、自車両MMの車輪速に基づいて算出した加減速度と、自車両MMに対する制動力指令値に基づいて、外乱を推定する。
(1)第1実施形態の構成に対し、後述の第2〜第4の構成を適宜組み合わせてもよい。(2)上記第1実施形態においては、外乱推定値SUBに応じて第1の閾値Th1、第2の閾値th2および第3の閾値Th3の全ての閾値を補正する例を示したが、これに限らず第1の閾値Th1、第2の閾値th2および第3の閾値Th3のいずれか1つあるいは2つを補正するようにしても良い。
次に第2実施形態について図面を参照して説明する。なお上記第1形態と同様な構成については同一の符号を付して説明する。
本実施形態の基本構成は、上記第1実施形態と同様である。ただし、本実施形態では、リスクポテンシャルを、自車両前方を撮像した画像に基づき演算する点が異なる。具体的には、撮像した画像に対する当該画像内に撮像されている障害物XMの情報から障害物XMとの接近度合いを算出する。すなわち、撮像した画像に対する当該画像内に撮像されている障害物XMの情報をリスクポテンシャルを表わす値として演算する。
すなわち、本実施形態の障害物情報演算部6Cは、カメラ等の撮像手段から構成される。撮像手段は、自車両MMの前部に設置されて車両前方を撮像する。
したがって、本実施形態では、障害物XMの自車両に対する接近度合いが大きいほど、すなわちリスクポテンシャルが高くなるほど上記占有率が大きくなる。
そして、上記第1閾値設定部8A、第2閾値設定部8E、第3閾値設定部10Aでは、前方画像における障害物XMの占有率の閾値を設定する。
具体的には第1の閾値Th1の初期値は45%、第2の閾値Th2の初期値は60%、第3の閾値Th3の初期値は45%とする。
その他の構成は、上記第1実施形態と同様である。
ここで、上記実施形態では、障害物XMの占有面積を接近度合い(すなわちリスクポテンシャルを示す値)として演算しているが、これに限定しない。例えば、撮像された障害物XM自体の面積を接近度合いとしても良いし、撮像された障害物XMの横幅を接近度合いとしても良い。
本実施形態では、前方画像に基づいて障害物XMに対する接近度合いを検出することによりリスクポテンシャルを求めている。このように、本実施形態では、障害物XMとの距離などを検出する装置を使用せず、前方画像を撮影する撮像手段を備えることで支援を行うことができる。
(1)撮像手段は、車両前方の画像を取得する。リスクポテンシャル算出手段は、撮像手段が取得する画像内の上記障害物XMに基づき接近度合いを求め、リスクポテンシャルを算出する。
障害物XMに対する運転者の視認状況に近い値としてリスクポテンシャルを設定することが可能となる。
次に、第3実施形態について図面を参照して説明する。なお、上記各実施形態と同様な構成については同一の符号を付して説明する。
本実施形態の基本構成は、上記第1実施形態と同様である。
本実施形態は上記第1実施形態に対し、外乱推定部における外乱を推定する方法、及び推定した外乱に応じた第1制動量、第2制動量の補正方法が異なる例である。
SUB = (P_brk0 / ARMYU) −A ・・・(11)
外乱推定値SUBを演算しない場合には、外乱推定値SUBに「0」を設定する。
ここで、本実施形態の外乱推定値SUBは、式(11)から分かるように、自車両MMに発生する制駆動力に対し影響を与える外乱による影響の度合いを示すものである。
本実施形態では、制動力が発生させる制動量に対して影響を与える外乱が、制動を助長する外乱(すなわち制動液圧に対する減速度が大きくなる外乱)であるほど、外乱推定値SUBは「0」よりも小さい値となる。一方、制動力が発生させる制動量に対して加算的に影響を与える外乱が、制動を妨げる外乱(すなわち制動液圧に対する減速度が小さくなる外乱)であるほど、外乱推定値SUBは「0」よりも大きな値となる。
DEC1 = DEC1_0 + β_dec1 ・・・(12)
また、第1制動力指令値演算部8Dでは、上記第1制動量演算部8Cにて演算された第1制動量DEC1に基づき。下記式を用いて制動力指令値P_brk1を演算する。
P_brk1 = DEC1 × ARMYU ・・・(13)
制動量制動力変換係数ARMYUは、制動量を制動液圧に変換するための変換係数である。
DEC2 = DEC2_0 + β_dec2 ・・・(14)
また、第2制動力指令値演算部8Hでは、上記第2制動量演算部8Gにて演算された第2制動量DEC2に基づいて下記式を用いて制動力指令値P_brkを演算する。
P_brk2 = DEC2 × ARMYU ・・・(15)
その他の構成は、上記第1実施形態と同様である。
図11は、本実施形態におけるタイムチャートの例である。なお、このタイムチャートでは、ペダル反力のタイムチャートについては省略している。
この図11の例では、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第1の閾値Th1で表されるリスクポテンシャルよりも高くなると、すなわち到達時間TTCが到達時間閾値TTC1未満になると(時刻t2)、運転者がアクセル操作を実施していない場合に、第1制動力指令値に応じた制動力を車両に付与する。
このように、第1制動力付与手段はアクセルペダル22が操作されていない場合にのみ制動力を付与する。このため、運転者が加速意図のない場合のみ制動力を付与することで、制動力を付与しても違和感の少ない走行シーンでのみ制動による支援を行うことができる。
これによって、第1の閾値Th1(第1制動力指令値の演算開始判定をする閾値)よりもリスクポテンシャルの高い状態で演算する第2制動力指令値による制動を行うことで、障害物XMとの相対速度V_tarがより高い走行シーンにおいても当該障害物XMとの接触を回避できる制動による支援を行うことができる。
このように、本実施形態では、制動力が発生させる制動量に対する外乱を推定し、推定した外乱に応じて制動量を加算的に補正することで、走行路勾配、空気抵抗等の制御量に影響を与える外乱の影響を低減することができる。
(1)外乱推定手段は、自車両MMに発生する制駆動力に対し影響を与える外乱を推定するとともに、推定した外乱に応じて制動量を加算的に補正する。
制駆動力に影響を与える走行路勾配や空気抵抗等に起因する外乱の影響を低減することが可能となる。
次に、本実施形態について図面を参照して説明する。なお上記各実施形態と同様な構成については同一の符号を付して説明する。
本実施形態の基本構成は、上記各実施形態と同様である。ただし、外乱推定の処理が異なる。
上記第1実施形態では、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第1の閾値Th1で表されるリスクポテンシャルよりも高い場合であって、且つ第1の制動を実施している場合に、外乱推定値SUBを演算している。
すなわち、本実施形態では、外乱推定部において、エンジントルクとシフトポジションに基づいて、制動支援を行っていないときでも外乱推定を実施する。
上記自車両・障害物情報取得部6から受け取ったエンジントルクと、上記ギア比と、車両の諸元に基づいて設定された所定のトルク比、デフギア比、車重、タイヤ半径を考慮した下記式に基づいて発生加速度推定値A_tarを算出する。
A_tar = エンジントルク×変速ギア比×トルク比×デフギア比
÷車重÷タイヤ半径 ・・・(16)
SUB = A_tar − A ・・(17)
そして、上記外乱推定値SUBに基づいて、第1及び第3実施形態と同様に各閾値、制御量を補正する。
ここで、電気自動車などのエンジン23を動力源としない車両においては、上記演算と同等の演算を行うことにより発生加速度推定値A_tarを演算する。
図12は、本実施形態を採用した場合におけるタイムチャート例である。なお、この図12に示すタイムチャート例ではアクセル反力について図示を省略してある。
本実施形態では、図12のタイムチャート例に示すように、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第1の閾値Th1や第3の閾値Th3で表されるリスクポテンシャルよりも低い状態(到達時間TTCが到達時間閾値TTC1や到達時間閾値TTC3よりも大きい状態)であっても、つまり、制動やペダル反力による運転支援を行う前でも、エンジントルクを検出することにより外乱を推定する。
これによって、外乱の状況によって、制動やペダル反力を開始する判断基準となる第1の閾値Th1(到達時間閾値TTC1)や第3の閾値Th3(到達時間閾値TTC3)を適切な値に補正することが出来る。
(1)外乱推定手段は、自車両MMに付与される制動に影響を与える外乱を推定する。第1補正手段は、外乱推定手段が推定する外乱による、自車両MMに付与される制動を抑制する抑制度合いが大きい場合、当該抑制度合いが小さい場合と比較して、上記第1の閾値及び第2の閾値のうちの少なくとも一つの閾値をリスクポテンシャルが低い値に補正する。
外乱により制動が妨げられるような状況ではより早いタイミングで支援を行うことができ、外乱により制動が助長されるような状況ではより遅いタイミングで支援を行うことができ、外乱に対応して適切なタイミングで運転支援を行うことが可能となる。
これによって、自車両MMに制動力が付与されていなくても、外乱を推定することが出来る。すなわち、制動力付与手段が第1制動力指令値演算手段及び第2制動力指令値演算手段の少なくとも一方が演算した制動力指令値に基づき自車両MMに制動力を付与する前であっても外乱を推定することが可能となる。
2 障害物情報検出センサ
3 アクセル開度センサ
4 スロットル開度センサ
5 シフトポジションセンサ
6 自車両・障害物情報取得部
6A 自車速演算部
6B 自車加減速度演算部
6C 障害物情報演算部
6D トルク検出部
6E 自車両・障害物情報出力部
7 支援情報演算部
7A リスクポテンシャル演算部
7B 外乱推定部
7C 支援情報出力部
8 制動力演算部
8A 第1閾値設定部
8B 第1制動力付与判断部
8C 第1制動量演算部
8D 第1制動力指令値演算部
8E 第2閾値設定部
8F 第2制動力付与判断部
8G 第2制動量演算部
8H 第2制動力指令値演算部
8J 制動力指令値選択部
9 制動力付与装置
10 アクセルペダル反力演算部
10A 第3閾値設定部
10B ペダル反力付与判断部
10C ペダル反力量演算部
10D アクセルペダル反力指令値演算部
11 アクセルペダル反力付与装置
20 コントローラ
21 スロットル開度制御部
22 アクセルペダル
23 エンジン
25 ブレーキペダル
26 マスタシリンダ
27 流体圧回路
28 ホイールシリンダ
29 制動流体圧制御部
30 車輪
A 加減速度
A_tar 発生加速度推定値
DEC1 第1制動量
DEC2 第2制動量
MM 自車両
XM 障害物
P_brk 制動力指令値
P_brk1 第1制動力指令値
P_brk2 第2制動力指令値
SUB 外乱推定値
TTC 到達時間
Th1 第1の閾値
Th2 第2の閾値
Th3 第3の閾値
D_tar 相対距離
V_tar 相対速度
Claims (10)
- 自車両進行方向の障害物に対する自車両のリスクポテンシャルを算出するリスクポテンシャル算出手段と、
アクセル開度を検出するペダル検出手段と、
上記リスクポテンシャルが予め設定したリスクポテンシャルである第1の閾値よりも高く、上記第1の閾値よりも高い予め設定した第2の閾値以下と判定したときに、上記アクセル開度が予め設定した所定値以上か否かを判定し、上記アクセル開度が所定値よりも小さいと判定した場合、上記自車両に制動力を付与し、上記アクセル開度が上記所定値以上と判定した場合、上記制動力の付与を抑制する第1制動力付与手段と、
上記リスクポテンシャルが、上記第2の閾値よりも高いと判定すると、上記制動力よりも大きい制動力を上記自車両に付与する第2制動力付与手段と、
を備えることを特徴とする車両用制動支援装置。 - 上記リスクポテンシャル算出手段は、上記リスクポテンシャルを表わす値として上記障害物に対する上記自車両の接近度合いを算出し、
上記第1制動力付与手段は、上記接近度合いに基づいて、上記リスクポテンシャルが上記第1の閾値よりも高く、上記第2の閾値以下であることを判定し、上記第2制動力付与手段は、上記接近度合いに基づいて、上記リスクポテンシャルが上記第2の閾値よりも高いことを判定することを特徴とする請求項1に記載した車両用制動支援装置。 - 上記リスクポテンシャル算出手段は上記接近度合いを、上記自車両と上記障害物との相対距離、上記障害物に対する上記自車両の相対速度、上記障害物に対する上記自車両の相対加減速度のうちの少なくとも1つに基づいて算出することを特徴とする請求項2に記載した車両用制動支援装置。
- 上記リスクポテンシャル算出手段は、上記障害物の位置に上記自車両が到達すると推定される到達時間を上記接近度合いとして算出することを特徴とする請求項2に記載した車両用制動支援装置。
- 自車両進行方向の画像を取得する撮像手段を備え、
上記リスクポテンシャル算出手段は、上記撮像手段が取得する画像内の上記障害物に基づき上記接近度合いを算出することを特徴とする請求項2に記載した車両用制動支援装置。 - 上記自車両に付与される制動を抑制する外乱を推定する外乱推定手段と、
上記自車両に付与される制動が上記外乱によって抑制されるほど、上記第1の閾値及び上記第2の閾値のうちの少なくとも一つの閾値をリスクポテンシャルが低い値に補正する第1補正手段と、
を備え、
上記外乱は、車両に制動力を付与する際の制動トルク伝達率、路面摩擦係数、車両重量、走行路勾配及び空気抵抗の少なくとも1つに起因する外乱であることを特徴とする請求項1から請求項5のいずれか1項に記載した車両用制動支援装置。 - 上記自車両に付与される制動を抑制する外乱を推定する外乱推定手段と、
上記自車両に付与される制動が上記外乱によって抑制されるほど、上記第1制動力付与手段又は上記第2制動力付与手段の少なくとも一方で付与する制動力を増大補正する第3補正手段と、
を備え、
上記外乱は、車両に制動力を付与する際の制動トルク伝達率、路面摩擦係数、車両重量、走行路勾配及び空気抵抗の少なくとも1つに起因する外乱であることを特徴とする請求項1から請求項6のいずれか1項に記載した車両用制動支援装置。 - 上記外乱推定手段は、上記第1制動力付与手段によって制動力を付与しているときに、外乱を推定し、
上記外乱に基づき、上記第2の閾値、及び上記第1制動力付与手段による制動力、の少なくとも一方を補正することを特徴とする請求項6又は請求項7に記載した車両用制動支援装置。 - 上記自車両の車輪速を検出する車輪速検出手段と、
上記車輪速に基づいて上記自車両の加減速度を算出する加減速度算出手段とを備え、
上記外乱推定手段は、上記加減速度と、上記第1制動力付与手段によって上記自車両に付与している制動力とに基づいて、外乱を推定することを特徴とする請求項8に記載した車両用制動支援装置。 - 自車両進行方向の障害物に対する自車両のリスクポテンシャルを算出するリスクポテンシャル算出手段と、
アクセル開度を検出するペダル検出手段と、
上記リスクポテンシャルが予め設定したリスクポテンシャルである第1の閾値よりも高く、上記第1の閾値よりも高い予め設定した第2の閾値以下と判定したときに、上記アクセル開度が予め設定した所定値以上か否かを判定し、上記アクセル開度が所定値よりも小さいと判定した場合、上記自車両に制動力を付与し、上記アクセル開度が上記所定値以上と判定した場合、上記制動力の付与を抑制する第1制動力付与手段と、
上記制動力を付与した後に、上記リスクポテンシャルが、上記第2の閾値よりも高いと判定すると、上記制動力よりも大きい制動力を上記自車両に付与する第2制動力付与手段と、
を備えることを特徴とする車両用制動支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014262693A JP6135662B2 (ja) | 2014-12-25 | 2014-12-25 | 車両用制動支援装置及び車両用制動支援方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014262693A JP6135662B2 (ja) | 2014-12-25 | 2014-12-25 | 車両用制動支援装置及び車両用制動支援方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013106292A Division JP2013177135A (ja) | 2013-05-20 | 2013-05-20 | 車両用制動支援装置及び車両用制動支援方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015071425A JP2015071425A (ja) | 2015-04-16 |
| JP6135662B2 true JP6135662B2 (ja) | 2017-05-31 |
Family
ID=53014129
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014262693A Active JP6135662B2 (ja) | 2014-12-25 | 2014-12-25 | 車両用制動支援装置及び車両用制動支援方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6135662B2 (ja) |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2551722B2 (ja) * | 1993-02-23 | 1996-11-06 | 株式会社金澤機械 | フランジ・コーナーピース装着装置 |
| JP3890967B2 (ja) * | 2001-12-11 | 2007-03-07 | 日産自動車株式会社 | 車両用制動制御装置 |
| JP2004161100A (ja) * | 2002-11-12 | 2004-06-10 | Nissan Motor Co Ltd | 車両用報知装置 |
| JP2004210148A (ja) * | 2003-01-06 | 2004-07-29 | Hitachi Ltd | 自動制動装置 |
| JP4023340B2 (ja) * | 2003-03-06 | 2007-12-19 | トヨタ自動車株式会社 | 車輌の衝突防止装置 |
| JP2006175941A (ja) * | 2004-12-21 | 2006-07-06 | Toyota Motor Corp | 加減速度制御装置 |
| JP4055792B2 (ja) * | 2005-06-30 | 2008-03-05 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2008018832A (ja) * | 2006-07-12 | 2008-01-31 | Fuji Heavy Ind Ltd | 車両運動制御装置 |
| JP4222398B2 (ja) * | 2006-09-21 | 2009-02-12 | 株式会社デンソー | 車両用衝突判定装置 |
| JP5250995B2 (ja) * | 2007-04-18 | 2013-07-31 | 日産自動車株式会社 | 走行支援装置 |
| JP2008279863A (ja) * | 2007-05-09 | 2008-11-20 | Denso Corp | 衝突緩和装置 |
-
2014
- 2014-12-25 JP JP2014262693A patent/JP6135662B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015071425A (ja) | 2015-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5381923B2 (ja) | 車両用制動支援装置及び車両用制動支援方法 | |
| JP4645598B2 (ja) | 車両用ブレーキ制御装置 | |
| JP4222398B2 (ja) | 車両用衝突判定装置 | |
| EP3135550B1 (en) | Collision avoidance support device | |
| US8972142B2 (en) | Travel support apparatus | |
| US8321117B2 (en) | Vehicle control system | |
| JP4740684B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| US20130297173A1 (en) | Travel support apparatus | |
| US9555705B2 (en) | Vehicle | |
| US20180170368A1 (en) | Driving assistance apparatus and driving assistance method | |
| WO2018230341A1 (ja) | 車両制御装置 | |
| EP3015325A1 (en) | Vehicle travel control apparatus | |
| JPH11348746A (ja) | 車両の走行制御装置 | |
| JP6135662B2 (ja) | 車両用制動支援装置及び車両用制動支援方法 | |
| JP2008100577A (ja) | 車両挙動制御装置 | |
| JP2013177135A (ja) | 車両用制動支援装置及び車両用制動支援方法 | |
| JP6844496B2 (ja) | 走行支援装置 | |
| JP6597703B2 (ja) | 車線逸脱抑制装置 | |
| JP5862068B2 (ja) | 車両用運転支援装置 | |
| JP2018176814A (ja) | 偏向制御装置 | |
| JP2019119229A (ja) | 制動力制御システム | |
| JP2020152205A (ja) | 車両制御装置 | |
| JP2020117006A (ja) | 車両の加減速度制御装置 | |
| JP2020032947A (ja) | 車両制御装置、車両制御方法および車両追従走行システム | |
| JP2018529585A (ja) | 車両縦方向に傾斜している車道で停止状態にある自動車においてドライバーに依存せずにブレーキ力保持機能を実施するための方法および装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150126 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160119 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160816 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161013 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170328 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170410 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6135662 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |