JP6098211B2 - 車両軌跡算出方法 - Google Patents
車両軌跡算出方法 Download PDFInfo
- Publication number
- JP6098211B2 JP6098211B2 JP2013029033A JP2013029033A JP6098211B2 JP 6098211 B2 JP6098211 B2 JP 6098211B2 JP 2013029033 A JP2013029033 A JP 2013029033A JP 2013029033 A JP2013029033 A JP 2013029033A JP 6098211 B2 JP6098211 B2 JP 6098211B2
- Authority
- JP
- Japan
- Prior art keywords
- section
- vehicle
- calculation method
- unforeseen
- trajectory
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004364 calculation method Methods 0.000 title claims description 42
- 238000000034 method Methods 0.000 claims description 49
- 230000001133 acceleration Effects 0.000 claims description 37
- 230000002159 abnormal effect Effects 0.000 claims description 10
- 230000007613 environmental effect Effects 0.000 claims description 7
- 238000001514 detection method Methods 0.000 description 11
- 230000014509 gene expression Effects 0.000 description 7
- 230000033001 locomotion Effects 0.000 description 3
- 238000000354 decomposition reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/49—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an inertial position system, e.g. loosely-coupled
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/01—Determining conditions which influence positioning, e.g. radio environment, state of motion or energy consumption
- G01S5/017—Detecting state or type of motion
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Navigation (AREA)
Description
そして、前記走行中の車両にヨーレートセンサ、横加速度センサおよび車速センサが備えられ、前記GPS信号に加えてヨーレート値、横方向加速度値、車速値を取得している場合に、前記不測区間では、ドリフト判定を行ってドリフト状態が判定されない場合には前記補間処理に代えて前記ヨーレートセンサにより検出したヨーレート値に基づいて走行軌跡を算出する。
yr_gy=gy/v (1)
yr_gy:ヨーレート値([°/s]、[dps])
v:車速[m/s]
gy:横方向加速度センサ値[m/s2]
yr=(yr_gy)×2π/360[rad/s]
ω=gy−(yr×v) (2)
ω_gy=ω/9.8 (3)
T=(b0+b1z−1+b2z−2+b3z−3+b4z−4)/
(1+a1z−1+a2z−2+a3z−3+a4z−4) (4)
|T(n)|≧0.2 (5)
|DRrelD(t)−DRrelD(t−1)|≧10[dps] (6)
|T(n)|≦0.1 (7)
|DRrelD(t)−DRrelD(t−1)|≦10[dps] (8)
0.1<|T(n)|<0.2 (9)
速度V=[(VN)2+(VE)2]1/2 (10)
方位θ=arctan(VN/VE) (11)
VNc=Vc×sinθc (12)
VEc=Vc×cosθc (13)
n番目の速度ベクトルV(n)の成分VN(n)(南北方向成分)およびVE(n)(東西方向の成分)によって速度ベクトルV(n)の方位θ(n)を式(14)により求めることができる。
(14)
角速度 ω(n)=[θ(n)−θ(n−1)]×10[°/s] (15)
角加速度α(n)=ω(n)−ω(n−1)[°/s2] (16)
判定式 |α(n)|≧20[°/s2] (17)
となるデータを検出する。すなわち、角加速度αの値の絶対値が20[°/s2]以上となる場合が異常区間の対象となる。不測区間としては、次の区間を設定する。
α(n)≧10[°/s2] (18)
を満たさなくなる1秒間の区間を含めて不測区間として設定する。
α(p-10)、…、α(p)、…、α(-1)、α(0)、α(1)、…、α(q)、…、α(q+10)
α(0)≧20[°/s2]
α(p-10)、…、α(p)、α(q)、…、α(q+10)<10[°/s2]
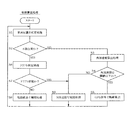
第1に、GPS受信機2により受信したGPS信号の受信状態が何らかの原因により走行軌跡を正常に算出できない不測区間について、制御装置1により、その不測区間の前後の区間についてGPS信号により算出した走行軌跡に基いて補間処理を行うことで、近似的に得ることができる。
なお、本発明は、上述した一実施形態のみに限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能であり、例えば、以下のように変形または拡張することができる。
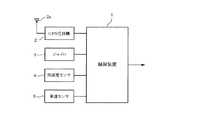
ドリフト判定は、必要に応じて実施すればよく、判定処理をしない場合にはN次近似で補間処理をすることができる。また、GPS信号に加えて、ジャイロ3によるヨーレート値や、加速度センサ4による横方向加速度値あるいは車速センサ5による車速データを取得している場合に、それらの情報に基づいてドリフト判定を行うことができる。
角加速度を算出して閾値と比較する不測区間の設定処理では、閾値を適宜の値に設定することができる。検出信号とノイズのレベルとの関係から適切なレベルに設定することが有効である。
Claims (7)
- 走行中の車両のGPS受信機により所定時間間隔で受信したGPS信号に基づいて走行経路における前記車両の走行軌跡を算出するようにした車両軌跡算出方法において、
前記GPS信号に基づいた走行軌跡が正常に算出できない不測区間では、前記不測区間の前後の区間について算出した走行軌跡に基いて補間処理を行なって前記不測区間内の走行軌跡を算出するものであって、
前記走行中の車両にヨーレートセンサ、横加速度センサおよび車速センサが備えられ、前記GPS信号に加えてヨーレート値、横方向加速度値、車速値を取得している場合に、
前記不測区間では、ドリフト判定を行ってドリフト状態が判定されない場合には前記補間処理に代えて前記ヨーレートセンサにより検出したヨーレート値に基づいて走行軌跡を算出することを特徴とする車両軌跡算出方法。 - 請求項1に記載の車両軌跡算出方法において、
前記補間処理は、前記不測区間の前後の一定区間について算出した走行軌跡を用い、前記不測区間内の走行軌跡を曲線近似処理により算出することを特徴とする車両軌跡算出方法。 - 請求項1または2に記載の車両軌跡算出方法において、
前記不測区間は、前記走行経路の地理的条件として前記GPS信号の受信レベルが低くなる場所もしくは受信レベルが乱れる場所を含んだ環境要因区間を予め指定することを特徴とする車両軌跡算出方法。 - 請求項3に記載の車両軌跡算出方法において、
前記不測区間とされる前記環境要因区間は、前記走行経路の途中の上方あるいは側方にGPS衛星からの電波を遮る構成物あるいはGPS衛星からの電波を乱す構成物が存在する区間であることを特徴とする車両軌跡算出方法。 - 請求項1から4のいずれか一項に記載の車両軌跡算出方法において、
車両軌跡を算出することに先立って、前記不測区間を前記GPS信号から算出する角加速度の値に基づいて設定する不測区間設定処理を実行することを特徴とする車両軌跡算出方法。 - 請求項5に記載の車両軌跡算出方法において、
前記不測区間設定処理は、前記GPS信号から算出した前記角加速度の値が第1の判定値以上となる異常区間を検出し、検出された前記異常区間の前後の所定時間の範囲を含む区間を不測区間として設定することを特徴とする車両軌跡算出方法。 - 請求項1から6の何れか一項に記載の車両軌跡算出方法において、
前記補間処理は、前記不測区間の前後の一定区間について算出した走行軌跡から、不測区間内の角速度をその要素である方位と速度とに分解してn次(nは3以上の整数)の近似線で近似して算出することを特徴とする車両軌跡算出方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013029033A JP6098211B2 (ja) | 2013-02-18 | 2013-02-18 | 車両軌跡算出方法 |
| PCT/JP2014/000031 WO2014125754A1 (ja) | 2013-02-18 | 2014-01-08 | 車両軌跡算出方法 |
| US14/768,093 US9778046B2 (en) | 2013-02-18 | 2014-01-08 | Vehicle trajectory calculation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013029033A JP6098211B2 (ja) | 2013-02-18 | 2013-02-18 | 車両軌跡算出方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014157114A JP2014157114A (ja) | 2014-08-28 |
| JP2014157114A5 JP2014157114A5 (ja) | 2015-07-09 |
| JP6098211B2 true JP6098211B2 (ja) | 2017-03-22 |
Family
ID=51353772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013029033A Expired - Fee Related JP6098211B2 (ja) | 2013-02-18 | 2013-02-18 | 車両軌跡算出方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9778046B2 (ja) |
| JP (1) | JP6098211B2 (ja) |
| WO (1) | WO2014125754A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11151654B2 (en) | 2015-09-30 | 2021-10-19 | Johnson Controls Tyco IP Holdings LLP | System and method for determining risk profile, adjusting insurance premiums and automatically collecting premiums based on sensor data |
| US10902524B2 (en) | 2015-09-30 | 2021-01-26 | Sensormatic Electronics, LLC | Sensor based system and method for augmenting underwriting of insurance policies |
| US11436911B2 (en) | 2015-09-30 | 2022-09-06 | Johnson Controls Tyco IP Holdings LLP | Sensor based system and method for premises safety and operational profiling based on drift analysis |
| US10354332B2 (en) * | 2015-09-30 | 2019-07-16 | Sensormatic Electronics, LLC | Sensor based system and method for drift analysis to predict equipment failure |
| US10552914B2 (en) | 2016-05-05 | 2020-02-04 | Sensormatic Electronics, LLC | Method and apparatus for evaluating risk based on sensor monitoring |
| US10810676B2 (en) | 2016-06-06 | 2020-10-20 | Sensormatic Electronics, LLC | Method and apparatus for increasing the density of data surrounding an event |
| JP6632071B2 (ja) * | 2016-12-21 | 2020-01-15 | Kddi株式会社 | 移動軌跡に応じて地図上の経路を推定するプログラム、装置及び方法 |
| JP6683162B2 (ja) * | 2017-03-28 | 2020-04-15 | カシオ計算機株式会社 | 電子機器、位置特定システム、位置特定方法及びプログラム |
| CN111292442B (zh) * | 2018-12-07 | 2022-02-15 | 江苏迪纳数字科技股份有限公司 | 一种基于车辆补报数据修正车辆行程分段的重算方法 |
| CN111866721A (zh) * | 2019-04-30 | 2020-10-30 | 博世汽车部件(苏州)有限公司 | 用于获取行驶轨迹的方法、装置和行驶设备 |
| CN111538050A (zh) * | 2020-04-17 | 2020-08-14 | 拉货宝网络科技有限责任公司 | 一种基于速度推算策略的gps轨迹纠偏方法 |
| CN111538052A (zh) * | 2020-04-30 | 2020-08-14 | 西安大唐电信有限公司 | 一种基于obd的北斗/gps的轨迹优化方法 |
| CN112835080B (zh) * | 2021-01-21 | 2024-03-19 | 成都路行通信息技术有限公司 | 车辆静止状态的轨迹修复方法、装置及电子设备 |
| CN116678430B (zh) * | 2023-05-23 | 2024-03-19 | 北京爱好科技有限公司 | 行驶轨迹确定方法及装置、电子设备和可读存储介质 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0755480A (ja) * | 1993-06-04 | 1995-03-03 | Koden Electron Co Ltd | ナビゲーション装置 |
| JP3013309B1 (ja) | 1999-02-19 | 2000-02-28 | 株式会社ゼンリン | ハイブリッド走行軌跡取得方法およびハイブリッド走行軌跡取得システム |
| JP4133426B2 (ja) | 2003-02-21 | 2008-08-13 | アルパイン株式会社 | ナビゲーション装置 |
| JP4226403B2 (ja) * | 2003-08-29 | 2009-02-18 | パイオニア株式会社 | マルチパス検出装置及び方法、ナビゲーション装置、並びにコンピュータプログラム |
| JP4913992B2 (ja) * | 2004-04-30 | 2012-04-11 | 株式会社小糸製作所 | 車両走行支援システム |
| JP2006125906A (ja) * | 2004-10-27 | 2006-05-18 | Looped Picture:Kk | 車両走行状態解析システム、方法、プログラムを記録した記憶媒体及びプログラム |
| JP2007155493A (ja) * | 2005-12-05 | 2007-06-21 | Sharp Corp | 通信端末 |
| JP4795206B2 (ja) * | 2006-03-10 | 2011-10-19 | 三菱電機株式会社 | ナビゲーション装置 |
| US8326532B2 (en) * | 2006-11-06 | 2012-12-04 | Tomtom Global Content B.V. | Arrangement for and method of two dimensional and three dimensional precision location and orientation determination |
| JP5270849B2 (ja) * | 2007-03-16 | 2013-08-21 | 日立オートモティブシステムズ株式会社 | 車両位置計算方法、および、車両位置計算装置 |
| JP2009058242A (ja) * | 2007-08-30 | 2009-03-19 | Alpine Electronics Inc | 車両位置・方位修正方法及び車両位置・方位修正装置 |
| JPWO2009157076A1 (ja) | 2008-06-26 | 2011-12-01 | パイオニア株式会社 | 通信環境予測端末、通信環境予測方法及び通信環境予測プログラム |
| JP2010276527A (ja) * | 2009-05-29 | 2010-12-09 | Sanyo Electric Co Ltd | ナビゲーション装置 |
| JP5673071B2 (ja) * | 2010-03-10 | 2015-02-18 | 株式会社豊田中央研究所 | 位置推定装置及びプログラム |
| JP5712494B2 (ja) * | 2010-03-23 | 2015-05-07 | 日本電気株式会社 | 走行支援装置、走行支援方法、及びプログラム |
| JP5367675B2 (ja) * | 2010-10-28 | 2013-12-11 | 株式会社ゼンリンデータコム | ナビゲーション端末、ナビゲーション方法およびナビゲーションプログラム |
| JP5774847B2 (ja) * | 2010-12-20 | 2015-09-09 | デジスパイス株式会社 | 車両走行再現評価装置 |
-
2013
- 2013-02-18 JP JP2013029033A patent/JP6098211B2/ja not_active Expired - Fee Related
-
2014
- 2014-01-08 US US14/768,093 patent/US9778046B2/en active Active
- 2014-01-08 WO PCT/JP2014/000031 patent/WO2014125754A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US9778046B2 (en) | 2017-10-03 |
| US20160003629A1 (en) | 2016-01-07 |
| JP2014157114A (ja) | 2014-08-28 |
| WO2014125754A1 (ja) | 2014-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6098211B2 (ja) | 車両軌跡算出方法 | |
| JP6008124B2 (ja) | 車両方位検出方法および車両方位検出装置 | |
| CN105509738B (zh) | 基于惯导/多普勒雷达组合的车载定位定向方法 | |
| US9719786B2 (en) | Systems for navigating using corrected yaw bias values | |
| JP4780174B2 (ja) | 角速度センサ補正装置、角速度算出装置、角速度センサ補正方法、角速度算出方法 | |
| US9395191B2 (en) | Navigation apparatus | |
| KR101417456B1 (ko) | 차량 요레이트센서의 바이어스 획득방법 | |
| JP6395771B2 (ja) | 車両位置検出装置、自動操舵制御装置、車両位置検出方法および自動操舵制御方法 | |
| CN110285804B (zh) | 基于相对运动模型约束的车辆协同导航方法 | |
| JP5074950B2 (ja) | 航法装置 | |
| CN103558617A (zh) | 一种定位的方法及装置 | |
| JP2014157114A5 (ja) | ||
| EP3943887A1 (en) | Dead-reckoning guidance system and method with cardinal-direction based coordinate-corrections | |
| CN110346824B (zh) | 一种车辆导航方法、系统、装置及可读存储介质 | |
| CN102589552A (zh) | 低成本组合导航系统的数据融合方法和装置 | |
| JP5164645B2 (ja) | カルマンフィルタ処理における繰り返し演算制御方法及び装置 | |
| CN113631883B (zh) | 车辆定位装置 | |
| KR20190003265A (ko) | 관성센서 캘리브레이션 방법 | |
| JP2019184566A (ja) | 車両および車両位置推定装置 | |
| JP5273127B2 (ja) | 角速度センサ補正装置および角速度センサ補正方法 | |
| US8890747B2 (en) | Longitudinal and lateral velocity estimation using single antenna GPS and magnetic compass | |
| JP5365606B2 (ja) | 角速度センサ補正装置および角速度センサ補正方法 | |
| US8140263B2 (en) | Method for deriving conversion coefficient used for specifying position from value detected by various sensors, and navigation apparatus | |
| RU2539131C1 (ru) | Бесплатформенная интегрированная навигационная система средней точности для мобильного наземного объекта | |
| JP6419242B2 (ja) | 移動距離測定装置、移動距離測定方法、及び移動距離測定プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150522 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170206 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6098211 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |