JP6066539B2 - メディカル用クレーンタワー昇降システム - Google Patents
メディカル用クレーンタワー昇降システム Download PDFInfo
- Publication number
- JP6066539B2 JP6066539B2 JP2016530335A JP2016530335A JP6066539B2 JP 6066539 B2 JP6066539 B2 JP 6066539B2 JP 2016530335 A JP2016530335 A JP 2016530335A JP 2016530335 A JP2016530335 A JP 2016530335A JP 6066539 B2 JP6066539 B2 JP 6066539B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- rotating shaft
- crane tower
- rotation axis
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims description 32
- 230000000694 effects Effects 0.000 description 9
- 230000003028 elevating effect Effects 0.000 description 8
- 230000000630 rising effect Effects 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 230000002079 cooperative effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/18—Heads with mechanism for moving the apparatus relatively to the stand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/2092—Undercarriages with or without wheels comprising means allowing depth adjustment, i.e. forward-backward translation of the head relatively to the undercarriage
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/24—Undercarriages with or without wheels changeable in height or length of legs, also for transport only, e.g. by means of tubes screwed into each other
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M13/00—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles
- F16M13/02—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles for supporting on, or attaching to, an object, e.g. tree, gate, window-frame, cycle
- F16M13/027—Ceiling supports
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/506—Supports for surgical instruments, e.g. articulated arms using a parallelogram linkage, e.g. panthograph
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M2200/00—Details of stands or supports
- F16M2200/06—Arms
- F16M2200/063—Parallelogram arms
Description
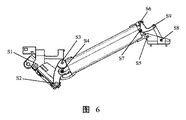
2 駆動装置
3 伝動装置
4 本体部材
5 接続ヘッド
6 減速装置
7 水平調整装置
11 第1のリンク
12 第2のリンク
13 第3のリンク
21 電動機
22 電動機支持ブロック
23 ストロークスイッチブラケット
24 上のストロークスイッチ
25 下のストロークスイッチ
31 ネジ
32 ナット
41 前接続ブロック
42 中空ビーム
43 第1の後接続ブロック
44 第2の後接続ブロック
100 メディカル用クレーンタワー昇降システム
S1 第1の回転軸
S2 第2の回転軸
S3 第3の回転軸
S4 第4の回転軸
S5 第5の回転軸
S6 第6の回転軸
S7 第7の回転軸
S8 第8の回転軸
S9 第9の回転軸
Claims (10)
- メインフレームと、駆動装置と、伝動装置と、本体部材と、第1のリンクと、第2のリンクと、第3のリンクと、接続ヘッドとを備え、前記メインフレームがベースに固定され、前記駆動装置が前記伝動装置により前記本体部材と前記第3のリンクを駆動し、前記伝動装置が入力部材と出力部材を備え、前記接続ヘッドがメディカル用クレーンタワーのタワー本体に固定されており、
前記駆動装置は、第1の回転軸を介して前記メインフレームに接続されており、
前記本体部材は、第3の回転軸を介して前記メインフレームに接続され、前記本体部材は、第2の回転軸を介して前記伝動装置の出力部材に接続され、前記本体部材は、第5の回転軸を介して前記接続ヘッドに接続され、前記本体部材は、第6の回転軸を介して前記第2のリンクに接続されており、
前記第3のリンクは、第4の回転軸を介して前記メインフレームに接続され、前記第3のリンクは、第7の回転軸を介して前記第2のリンクに接続されており、
前記第1のリンクは、第9の回転軸を介して前記第2のリンクに接続され、前記第1のリンクは、第8の回転軸を介して前記接続ヘッドに接続されており、
前記第1の回転軸、前記第2の回転軸、前記第3の回転軸、前記第4の回転軸、前記第5の回転軸、前記第6の回転軸、前記第7の回転軸、前記第8の回転軸、及び前記第9の回転軸は、相互に平行であり、前記第1乃至第9の回転軸を垂直的に横切る断面から見ると、前記第3の回転軸と、前記第4の回転軸と、前記第6の回転軸と、前記第7の回転軸とが第1の平行四辺形を構成し、前記第5の回転軸と、前記第6の回転軸と、前記第8の回転軸と、前記第9の回転軸とが第2の平行四辺形を構成する、
ことを特徴とするメディカル用クレーンタワー昇降システム。 - 前記駆動装置は、電動機である、
請求項1に記載のメディカル用クレーンタワー昇降システム。 - 前記伝動装置は、ネジ・ナット型の伝動装置であり、即ち、前記伝動装置は、その入力部材がネジであり、その出力部材がナットである、
請求項2に記載のメディカル用クレーンタワー昇降システム。 - 前記駆動装置と前記伝動装置との間に設けられた減速装置を更に備える、
請求項1に記載のメディカル用クレーンタワー昇降システム。 - 前記本体部材は、前接続ブロックと、中空ビームと、第1の後接続ブロックと、第2の後接続ブロックとを備え、前記前接続ブロックが前記中空ビームの前側に設けられ、且つ第3の回転軸を介して前記メインフレームに接続され、第2の回転軸を介して前記伝動装置の出力部材に接続されており、前記第1の後接続ブロックが前記中空ビームの後上側に設けられ、且つ第6の回転軸を介して前記第2のリンクに接続されており、前記第2の後接続ブロックが前記中空ビームの後下側に設けられ、且つ第5の回転軸を介して前記接続ヘッドに接続されている、
請求項1に記載のメディカル用クレーンタワー昇降システム。 - 前記本体部材と前記第6の回転軸との間に設けられ、前記接続ヘッドの下面を水平位置に調整するための水平調整装置を更に備える、
請求項1に記載のメディカル用クレーンタワー昇降システム。 - 前記第1のリンク、前記第2のリンク、及び前記第3のリンクは、何れも一対のリンクを備える、
請求項1に記載のメディカル用クレーンタワー昇降システム。 - 第1の回転軸を介して前記メインフレームに接続され、前記電動機が固定された電動機支持ブロックを更に備える、
請求項3に記載のメディカル用クレーンタワー昇降システム。 - 前記電動機支持ブロックに固定され、上のストロークスイッチ及び下のストロークスイッチが設けられたストロークスイッチブラケットを更に備える、
請求項8に記載のメディカル用クレーンタワー昇降システム。 - 前記ネジは、ボールネジである、
請求項3に記載のメディカル用クレーンタワー昇降システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310333198.0 | 2013-08-02 | ||
| CN2013103331980A CN103349569A (zh) | 2013-08-02 | 2013-08-02 | 一种医用吊塔电动升降结构 |
| CN201410339398.1 | 2014-07-16 | ||
| CN201410339398.1A CN104127241B (zh) | 2013-08-02 | 2014-07-16 | 医用吊塔升降系统 |
| PCT/CN2014/082975 WO2015014240A1 (zh) | 2013-08-02 | 2014-07-25 | 医用吊塔升降系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016532487A JP2016532487A (ja) | 2016-10-20 |
| JP6066539B2 true JP6066539B2 (ja) | 2017-01-25 |
Family
ID=49306062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016530335A Active JP6066539B2 (ja) | 2013-08-02 | 2014-07-25 | メディカル用クレーンタワー昇降システム |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9681926B2 (ja) |
| EP (1) | EP3028662B1 (ja) |
| JP (1) | JP6066539B2 (ja) |
| CN (3) | CN103349569A (ja) |
| MY (1) | MY174707A (ja) |
| SG (1) | SG11201600609SA (ja) |
| WO (1) | WO2015014240A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103349569A (zh) * | 2013-08-02 | 2013-10-16 | 迈柯唯医疗设备(苏州)有限公司 | 一种医用吊塔电动升降结构 |
| US10323682B2 (en) * | 2015-07-25 | 2019-06-18 | Kolberg-Pioneer, Inc. | Apparatus and method for an actuator mounting assembly with a rocker pin |
| CN106667585B (zh) * | 2017-01-08 | 2023-07-28 | 迈柯唯医疗设备(苏州)有限公司 | 伸缩元件的双向释放机构 |
| CN114110364B (zh) * | 2018-03-23 | 2024-04-09 | 深圳市大疆创新科技有限公司 | 竖向增稳机构 |
| CN110312887B (zh) * | 2018-03-23 | 2022-01-18 | 深圳市大疆创新科技有限公司 | 竖向增稳机构和竖向增稳装置 |
| EP3658814B1 (en) * | 2018-03-23 | 2022-03-02 | SZ DJI Technology Co., Ltd. | Load-stabilizing apparatus |
| CN110291324B (zh) * | 2018-03-23 | 2021-08-17 | 深圳市大疆创新科技有限公司 | 竖向增稳机构、云台装置以及拍摄系统 |
| CN113418104B (zh) * | 2018-03-23 | 2023-01-10 | 深圳市大疆创新科技有限公司 | 竖向增稳机构 |
| CN113100962B (zh) * | 2021-03-31 | 2022-03-29 | 山东大学齐鲁医院(青岛) | 一种胸外科吊架式手术辅助装置 |
| CN113288661A (zh) * | 2021-04-28 | 2021-08-24 | 深圳市富力达工业有限公司 | 摆臂升降系统 |
| CN114869643B (zh) * | 2022-05-18 | 2024-03-01 | 迈柯唯医疗设备(苏州)有限公司 | 医用吊塔高度调节装置 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE8309857U1 (de) * | 1983-04-02 | 1986-09-25 | Wella Ag, 6100 Darmstadt | Deckenstativ, insbesondere als Träger für medizinisch-technische Geräte u.dgl. |
| DE3407338C1 (de) * | 1984-02-29 | 1985-06-27 | Pfaff Industriemaschinen Gmbh, 6750 Kaiserslautern | Naehmaschine mit einer Vorschubvorrichtung |
| JPH081279Y2 (ja) * | 1990-05-25 | 1996-01-17 | 日東工器株式会社 | 荷役用バランサ |
| JP3128871B2 (ja) * | 1991-07-05 | 2001-01-29 | オムロン株式会社 | 領域識別装置 |
| JP3273084B2 (ja) * | 1992-08-20 | 2002-04-08 | オリンパス光学工業株式会社 | 医療器具ホルダ装置 |
| DE19742051B4 (de) * | 1997-09-24 | 2006-12-28 | Carl Zeiss | Stativ mit Energiespeicher zum Gewichtsausgleich |
| CH692926A5 (de) * | 1997-09-24 | 2002-12-13 | Zeiss Carl | Stativ mit Energiespeicher zum Gewichtsausgleich. |
| US6788018B1 (en) * | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| DE10042272B4 (de) * | 2000-08-29 | 2012-10-31 | Leica Instruments (Singapore) Pte. Ltd. | Stativanordnung |
| CN1809321A (zh) * | 2003-06-20 | 2006-07-26 | Gpa股份有限公司 | 摄影用升降架 |
| JP2005013588A (ja) * | 2003-06-27 | 2005-01-20 | Olympus Corp | 手術用顕微鏡 |
| WO2005067808A1 (ja) * | 2004-01-13 | 2005-07-28 | Olympus Corporation | 手術用顕微鏡 |
| US7837674B2 (en) * | 2005-01-24 | 2010-11-23 | Intuitive Surgical Operations, Inc. | Compact counter balance for robotic surgical systems |
| JP4036867B2 (ja) * | 2005-02-04 | 2008-01-23 | オリンパス株式会社 | 手術用顕微鏡 |
| DE102005017487A1 (de) * | 2005-04-15 | 2006-10-19 | Sachtler Gmbh & Co. Kg | Federarm und Körperstativ |
| US8342467B2 (en) * | 2005-10-04 | 2013-01-01 | Eric Ronald Stachowski | Apparatus for hand control, pressure amplification, and stabilization of medical and industrial devices |
| CN201001772Y (zh) * | 2006-12-30 | 2008-01-09 | 天津科波菲尔科技发展有限公司 | 电动吊塔 |
| CN101311607B (zh) * | 2007-05-24 | 2011-04-20 | 深圳迈瑞生物医疗电子股份有限公司 | 平行四连杆机构 |
| DE102008011639B4 (de) * | 2008-02-28 | 2013-01-03 | Leica Instruments (Singapore) Pte. Ltd. | Stativ, insbesondere für ein Operations-Mikroskop |
| DE102008026622B4 (de) * | 2008-06-03 | 2011-06-16 | Siemens Aktiengesellschaft | Verschiebevorrichtung für einen Röntgen-C-Bogen |
| US8746634B2 (en) * | 2009-01-30 | 2014-06-10 | Randy Rotheisler | Articulated jib for moving a camera during the production of a motion picture |
| EP2446807B1 (en) * | 2010-06-10 | 2017-05-10 | Olympus Corporation | Endoscope-holding device |
| US9186220B2 (en) * | 2010-12-17 | 2015-11-17 | Ethicon Endo-Surgery, Inc. | Surgical system and methods for mimicked motion |
| JP5265818B2 (ja) * | 2011-03-03 | 2013-08-14 | オリンパスメディカルシステムズ株式会社 | 医療用保持装置 |
| CN202497237U (zh) * | 2011-05-04 | 2012-10-24 | 上海龙奕实业有限公司 | 电动臂 |
| DE102011119813B4 (de) * | 2011-12-01 | 2015-09-03 | Leica Microsystems (Schweiz) Ag | Stativ für ein Operationsmikroskop |
| CN103591416B (zh) * | 2012-08-17 | 2015-12-09 | 深圳迈瑞生物医疗电子股份有限公司 | 一种锁定器及其支撑臂和超声成像系统 |
| KR101434870B1 (ko) * | 2013-02-19 | 2014-09-02 | 한양대학교 에리카산학협력단 | 의료 광학 기구용 스탠드 |
| CN103349569A (zh) * | 2013-08-02 | 2013-10-16 | 迈柯唯医疗设备(苏州)有限公司 | 一种医用吊塔电动升降结构 |
| US9888766B2 (en) * | 2014-09-23 | 2018-02-13 | Kelly International Corp. | Lifting mechanism with support function |
-
2013
- 2013-08-02 CN CN2013103331980A patent/CN103349569A/zh active Pending
-
2014
- 2014-07-16 CN CN201410339398.1A patent/CN104127241B/zh active Active
- 2014-07-16 CN CN201420394470.6U patent/CN203970559U/zh not_active Withdrawn - After Issue
- 2014-07-25 EP EP14832085.6A patent/EP3028662B1/en active Active
- 2014-07-25 MY MYPI2016000162A patent/MY174707A/en unknown
- 2014-07-25 SG SG11201600609SA patent/SG11201600609SA/en unknown
- 2014-07-25 WO PCT/CN2014/082975 patent/WO2015014240A1/zh active Application Filing
- 2014-07-25 JP JP2016530335A patent/JP6066539B2/ja active Active
- 2014-07-25 US US14/907,465 patent/US9681926B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| MY174707A (en) | 2020-05-08 |
| CN104127241B (zh) | 2016-06-08 |
| US9681926B2 (en) | 2017-06-20 |
| JP2016532487A (ja) | 2016-10-20 |
| EP3028662A4 (en) | 2017-03-22 |
| CN203970559U (zh) | 2014-12-03 |
| EP3028662B1 (en) | 2018-03-07 |
| CN104127241A (zh) | 2014-11-05 |
| CN103349569A (zh) | 2013-10-16 |
| SG11201600609SA (en) | 2016-03-30 |
| EP3028662A1 (en) | 2016-06-08 |
| WO2015014240A1 (zh) | 2015-02-05 |
| US20160184048A1 (en) | 2016-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6066539B2 (ja) | メディカル用クレーンタワー昇降システム | |
| JP5714557B2 (ja) | 6自由度を有する大型画面協調装置 | |
| CN105179894B (zh) | 一种双目视觉云台 | |
| CN108436967B (zh) | 水平多关节型机器人及其倒置设置方法 | |
| CN103273493A (zh) | 一种机器人颈部机构 | |
| CN104683674A (zh) | 新型全角度摄像装置 | |
| CN110469920A (zh) | 一种用于空调外机安全防护的调节安装装置 | |
| WO2012088749A1 (zh) | 立体动态影像显示台 | |
| CN203926084U (zh) | 一种旋转风扇 | |
| KR20130036865A (ko) | 이동식 칠판 | |
| CN108798085A (zh) | 一种集升降、旋转、侧移于一体的舞台 | |
| CN103507397B (zh) | 一种印刷机用网框升降装置 | |
| CN202529731U (zh) | 操纵室方位调节机构及工程机械 | |
| CN105656415A (zh) | 一种太阳联动跟踪装置 | |
| KR200469149Y1 (ko) | 3자유도 모션의자 | |
| CN201167442Y (zh) | 布线模板支撑装置 | |
| KR20080030181A (ko) | 3단 수직 이송장치 | |
| CN203131348U (zh) | 结构改进的电动可移动电视机架 | |
| CN105417382A (zh) | 一种可转向的桥式起重机操作室 | |
| CN103934818B (zh) | 机器人 | |
| CN206940302U (zh) | 一种建筑工地用简易起重机 | |
| CN204468131U (zh) | 孕妇用b超检查床 | |
| CN107938506A (zh) | 一种可自装卸上弦检查车 | |
| JP5581353B2 (ja) | 昇降装置 | |
| CN204844157U (zh) | 机械手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6066539 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |