ここで、好適には、本明細書においてモータリング制御とは、エンジンブレーキ走行中に所定のエンジンブレーキ力を発生させるために、電動機を制御してエンジン回転速度を所定の回転速度に制御するものである。
以下、本発明の実施例を図面を参照しつつ詳細に説明する。なお、以下の実施例において図は適宜簡略化或いは変形されており、各部の寸法比および形状等は必ずしも正確に描かれていない。
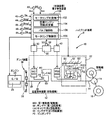
図1は、本発明が適用されたハイブリッド車両8(車両8)の車両用駆動装置10を説明する概略構成図である。車両用駆動装置10は、エンジン24と、動力伝達装置12と、エンジン24と動力伝達装置12との間に設けられている後述するダンパ装置38とを含んで構成されている。図1において、この車両用駆動装置10では、車両8において、主駆動源であるエンジン24のトルクが後述するダンパ装置38および遊星歯車装置26を介して車輪側出力軸14に伝達され、その車輪側出力軸14から差動歯車装置16を介して左右一対の駆動輪18にトルクが伝達されるようになっている。また、この車両用駆動装置10には、走行のための駆動力を出力する力行制御およびエネルギを回収するための回生制御を選択的に実行可能な第2電動機MG2が設けられており、この第2電動機MG2は自動変速機22を介して上記車輪側出力軸に連結されている。したがって、第2電動機MG2から車輪側出力軸へ伝達される出力トルクがその自動変速機22で設定される変速比γs(=第2電動機MG2の回転速度Nmg2/車輪側出力軸の回転速度Nout)に応じて増減されるようになっている。
第2電動機MG2と駆動輪18との間の動力伝達経路に介装されている自動変速機22は、変速比γsが「1」より大きい複数段を成立させることができるように構成されており、第2電動機MG2からトルクを出力する力行時にはそのトルクを増大させて車輪側出力軸へ伝達することができるので、第2電動機MG2が一層低容量もしくは小型に構成される。これにより、例えば高車速に伴って車輪側出力軸の回転速度Noutが増大した場合には、第2電動機MG2の運転効率を良好な状態に維持するために、変速比γsを小さくして第2電動機MG2の回転速度(以下、第2電動機回転速度という)Nmg2を低下させたり、また車輪側出力軸の回転速度Noutが低下した場合には、変速比γsを大きくして第2電動機回転速度Nmg2を増大させる。
上記動力伝達装置12は、第1電動機MG1および第2電動機MG2を備えて構成されており、エンジン24のトルクを駆動輪18に伝達する。上記エンジン24は、ガソリンエンジンやディーゼルエンジンなどの燃料を燃焼させて動力を出力する公知の内燃機関であって、マイクロコンピュータを主体とする図示しないエンジン制御用の電子制御装置100(E−ECU)によって、スロットル弁開度や吸入空気量、燃料供給量、点火時期などの運転状態が電気的に制御されるように構成されている。また、エンジン24は、可変バルブ機構25を備えており、エンジン24のバルブタイミングおよびバルブリフト量を適宜調整することができる。
前記電子制御装置100(制御装置)には、アクセル操作量センサASからのアクセルペダルの操作量であるアクセル開度Accを表す信号、ブレーキセンサBSからのブレーキペダルの有無Bonを表す信号、クランク角センサ43からのクランク軸36のクランク角に対応するエンジン回転速度Neを表す信号、第1レゾルバ44からの第1電動機MG1の第1電動機回転速度Nmg1を表す信号、第2レゾルバ46からの第2電動機MG2の第2電動機回転速度Nmg2を表す信号、出力軸回転速度センサ48からの車速Vに対応する車輪側出力軸14の回転速度Noutを表す信号、エンジン水温センサ49からのエンジン水温Twを表す信号、バッテリセンサ50からの蓄電装置32(バッテリ)の充電容量SOCを表す信号等が供給されている。
上記第1電動機MG1(電動機)は、例えば同期電動機であって、駆動トルクTm1を発生させる電動機としての機能と発電機としての機能とを選択的に生じるように構成され、インバータ30を介してバッテリー、コンデンサなどの蓄電装置32に接続されている。そして、マイクロコンピュータを主体とする図示しないモータジェネレータ制御用の電子制御装置100(MG−ECU)によってそのインバータ30が制御されることにより、第1電動機MG1の出力トルクTm1あるいは回生トルクTm1が調節或いは設定されるようになっている。この第1電動機MG1を制御することにより、遊星歯車装置26の差動状態を制御してエンジン回転速度Neを制御することができる。なお、第1電動機MG1が、本発明の電動機に対応している。
遊星歯車装置26は、サンギヤS0と、そのサンギヤS0に対して同心円上に配置されたリングギヤR0と、これらサンギヤS0およびリングギヤR0に噛み合うピニオンギヤP0を自転かつ公転自在に支持するキャリヤCA0とを三つの回転要素として備えて公知の差動作用を生じるシングルピニオン型の遊星歯車機構である。遊星歯車装置26はエンジン24および自動変速機22と同心に設けられている。遊星歯車装置26および自動変速機22は中心線に対して対称的に構成されているため、図1ではそれらの下半分が省略されている。
本実施例では、エンジン24のクランク軸36は、ダンパ装置38および動力伝達軸39を介して遊星歯車装置26のキャリヤCA0に連結されている。これに対してサンギヤS0には第1電動機MG1が連結され、リングギヤR0には車輪側出力軸14および差動歯車装置16を介して駆動輪18が連結されている。このキャリヤCA0は入力要素として機能し、サンギヤS0は反力要素として機能し、リングギヤR0は出力要素として機能している。なお、遊星歯車装置26が本発明の差動機構に対応し、サンギヤS0が本発明の第1回転要素に対応し、キャリヤCA0が本発明の第2回転要素に対応し、リングギヤR0が本発明の第3回転要素に対応している。
上記遊星歯車装置26において、キャリヤCA0に入力されるエンジン24の出力トルクに対して、第1電動機MG1による反力トルクTm1がサンギヤS0に入力されると、出力要素となっているリングギヤR0には、直達トルクが現れるので、第1電動機MG1は発電機として機能する。また、リングギヤR0の回転速度すなわち車輪側出力軸14の回転速度(出力軸回転速度)Noutが一定であるとき、第1電動機MG1の回転速度Nmg1を上下に変化させることにより、エンジン24の回転速度(エンジン回転速度)Neを連続的に(無段階に)変化させることができる。
本実施例の前記自動変速機22は、一組のラビニョ型遊星歯車機構によって構成されている。すなわち自動変速機22では、第1サンギヤS1と第2サンギヤS2とが設けられており、その第1サンギヤS1にステップドピニオンP1の大径部が噛合するとともに、そのステップドピニオンP1の小径部がピニオンP2に噛合し、そのピニオンP2が前記各サンギヤS1、S2と同心に配置されたリングギヤR1(R2)に噛合している。上記各ピニオンP1、P2は、共通のキャリヤCA1(CA2)によって自転かつ公転自在にそれぞれ保持されている。また、第2サンギヤS2がピニオンP2に噛合している。
前記第2電動機MG2(電動機)は、前記モータジェネレータ制御用の電子制御装置100(MG−ECU)によりインバータ40を介して制御されることにより、電動機または発電機として機能させられ、アシスト用出力トルクあるいは回生トルクが調節或いは設定される。第2サンギヤS2にはその第2電動機MG2が連結され、上記キャリヤCA1が車輪側出力軸に連結されている。第1サンギヤS1とリングギヤR1とは、各ピニオンP1、P2と共にタプルピニオン型遊星歯車装置に相当する機構を構成し、また第2サンギヤS2とリングギヤR1とは、ピニオンP2と共にシングルピニオン型遊星歯車装置に相当する機構を構成している。
そして、自動変速機22には、第1サンギヤS1を選択的に固定するためにその第1サンギヤS1と非回転部材であるハウジング42との間に設けられた第1ブレーキB1と、リングギヤR1を選択的に固定するためにそのリングギヤR1とハウジング42との間に設けられた第2ブレーキB2とが設けられている。これらのブレーキB1、B2は摩擦力によって制動力を生じるいわゆる摩擦係合装置であり、多板形式の係合装置あるいはバンド形式の係合装置を採用することができる。そして、これらのブレーキB1、B2は、それぞれ油圧シリンダ等のブレーキB1用油圧アクチュエータ、ブレーキB2用油圧アクチュエータにより発生させられる係合圧に応じてそのトルク容量が連続的に変化するように構成されている。
以上のように構成された自動変速機22は、第2サンギヤS2が入力要素として機能し、またキャリヤCA1が出力要素として機能し、第1ブレーキB1が係合させられると「1」より大きい変速比γshの高速段Hが成立させられ、第1ブレーキB1に替えて第2ブレーキB2が係合させられるとその高速段Hの変速比γshより大きい変速比γslの低速段Lが成立させられるように構成されている。すなわち、自動変速機22は2段変速機で、これらの変速段HおよびLの間での変速は、車速Vや要求駆動力(もしくはアクセル操作量)などの走行状態に基づいて実行される。より具体的には、変速段領域を予めマップ(変速線図)として定めておき、検出された運転状態に応じていずれかの変速段を設定するように制御される。
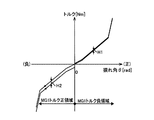
本実施例のダンパ装置38は、エンジン24と第1電動機MG1との間の動力伝達経路上に介挿されており、捩れ角の正負で異なるヒステリシストルクを発生させる図示しない正負可変ヒス機構を備えている。図2に、本実施例のダンパ装置38の捩り特性を示す。図2において、横軸がダンパ装置38の捩れ角θ(rad)を示し、縦軸がトルク(Nm)を示している。図2に示すように、捩れ角θが正方向(正側)の捩れ角領域、すなわちエンジン側からトルク(駆動力)が伝達される領域では、小ヒステリシストルクH1が発生する。一方、捩れ角θが負側の捩れ角領域、すなわち第1電動機側からエンジン側にトルクが伝達される領域では、大ヒステリシストルクH2が発生する。このように、エンジン24によって捩られるダンパ装置38の正方向(正側)の捩れで発生する小ヒステリシストルクH1よりも、第1電動機MG1によって捩られるダンパ装置38の負方向の捩れで発生する大ヒステリシストルクH2の方が大きくなるように設定されている。なお、上記捩れ角θの正負で異なるヒステリシストルクを発生させる、正負可変ヒス機構は公知技術であるので、構造などの具体的な説明については省略する。
このように構成されるダンパ装置38において、例えばエンジン始動にあっては、エンジン回転速度Neが第1電動機MG1によって引き上げられるため、ダンパ装置38は負の捩れ角となる。従って、大ヒステリシストルクH2が発生し、エンジン回転速度Neが共振周波数領域を通過する際の捩れ共振が減衰される。また、エンジン駆動中は、小ヒステリシストルクH1が発生するため、動力伝達装置12で発生するこもり音や歯打ち音が抑制される。ここで、エンジンブレーキ走行中(モータリング走行中)においては、エンジン回転速度Neが第1電動機MG1によって制御される。このエンジンブレーキ走行中においてもこもり音や歯打ち音が発生し、このこもり音や歯打ち音を抑制するには、小ヒステリシストルクを発生させることが好ましい。しかしながら、エンジンブレーキ走行中のダンパ装置38は、第1電動機MG1によって捩られる状態となるために負の捩れ角となり、大ヒステリシストルクH2が発生する。従って、こもり音や歯打ち音を効果的に抑制できずNV特性が悪化するという問題があった。
これに対して、このNV特性の悪化する回転速度領域(以下、NV悪化回転速度領域)のエンジン回転速度域を第1電動機MG1によって速やかに通過させてNV特性の悪化を防止する方法がある。しかしながら、例えばエンジン回転速度Neや車速Vが高い状態で第1電動機MG1によるエンジン回転速度Neの引き下げを開始すると、ピニオンギヤP0の回転速度が高回転化されてピニオンギヤの耐久性が低下する可能性が生じる。これを防止するため、ピニオンギヤP0の耐久性が低下しないように、ピニオンギヤP0の上限回転速度Npin_maxが予め定格的に設定される。このピニオンギヤP0に上限回転速度Npin_maxが設定されると、NV悪化回転速度領域においてエンジン回転速度Neを速やかに低下させることが困難となるため、こもり音や歯打ち音が発生しNV特性が悪化する可能性があった。そこで、電子制御装置100は、エンジンブレーキ走行中(モータリング走行中)にエンジン回転速度NeをNV悪化回転速度領域よりも低い回転速度まで引き下げる場合、エンジン回転速度NeをNV悪化回転速度領域よりも高い回転速度で所定の待機時間だけ維持した後にエンジン回転速度Neを低下させる。以下、本願発明に係る電子制御装置100の制御作動について詳細に説明する。
図1に戻り、電子制御装置100は、モータリング判定部102、目標エンジン回転決定部104、バルブ制御部106、およびモータリング制御部108を機能的に備えている。モータリング判定部102は、エンジン24がモータリング状態、すなわちエンジンブレーキ走行状態でエンジン回転速度Neが第1電動機MG1によって制御される走行状態であるか否かを判定する。モータリング判定部102は、例えばアクセルペダルの踏み込みが解除された状態であることや車速Vなどに基づいてエンジン24がモータリング状態であることを判定する。
モータリング判定部102によってエンジン12がモータリング状態であると判定されると、目標エンジン回転決定部104が実行される。目標エンジン回転決定部104は、モータリング走行中(エンジンブレーキ走行中)において維持するエンジン12の目標回転速度Ne*を決定する。目標エンジン回転決定部104は、車速Vおよび予め設定されているピニオンギヤP0の上限回転速度Npin_maxなどから、ピニオンギヤP0のピニオン回転速度Npinが上限回転速度Npin_max以下となる第1エンジン回転速度Ne1を算出する。なお、サンギヤS0の回転速度Ns(第1電動機回転速度Nmg1)、リングギヤR0の回転速度Nr(車輪側出力軸14の回転速度Nout)、キャリヤCA0の回転速度Nca(エンジン回転速度Ne)、遊星歯車装置26のギヤ比ρ等からなる、ピニオンギヤP0のピニオン回転速度Npinを算出する公知の算術式に基づいて、第1エンジン回転速度Ne1を算出することができる。
次いで、目標エンジン回転決定部104は、算出された第1エンジン回転速度Ne1が、予め求められて記憶されているNV特性の悪化するNV悪化回転速度領域(N1_L〜N1_U)にあるか否かを判定する。そして、第1エンジン回転速度Ne1がNV悪化エンジン回転速度領域にある場合(N1_L<Ne1<N1_U)には、NV特性の悪化を回避するため、NV悪化上限回転速度N1_Uを目標回転速度Ne*に決定する。また、第1エンジン回転速度Ne1がNV悪化回転速度領域にない場合には、その回転速度で維持されてもNV特性は悪化しないので、第1エンジン回転速度Ne1を目標回転速度Ne*に決定する。なお、NV悪化回転速度領域が本発明の共振回転数領域に対応している。
このNV悪化回転速度領域(N1_L〜N1_U)は、車両用駆動装置10の構造やエンジン水温Tw等に基づいて決定され、例えば自動変速機22のギヤ段やエンジン水温Tw等で規定されるNV悪化領域マップとして記憶されている。また、エンジン24は、例えば油圧を制御することで、バルブの開閉タイミングやバルブリフト量を調整する可変バルブ機構25を備えており、モータリング走行中において例えばバルブの閉じタイミングを遅らせることで、エンジン24の気筒内の圧力を減少させるデコンプ(デコンプ制御、減圧制御)を実施することができる。なお、可変バルブ機構25は、公知の技術であるためその説明を省略する。このデコンプが実行されると、エンジンブレーキ走行中の走行抵抗(エンジンブレーキ力)が小さくなることに関連して、NV悪化回転速度領域が狭くなる。従って、デコンプ制御を実施する場合のNV悪化回転速度領域マップと、デコンプ制御を実施しない場合のNV悪化回転速度領域マップとを別個に備えている。なお、以下において、回転速度(N1_L〜N1_U)をデコンプ制御を実施する場合のNV悪化回転速度領域と定義し、回転速度領域(N2_L〜N2_U)をデコンプ制御を実施しない場合のNV悪化回転速度領域と定義する。また、バルブタイミングだけでなくバルブリフト量を調整することでも気筒内の圧力を減圧することができる。従って、デコンプは、バルブタイミングおよびバルブリフト量の少なくとも1つが実施できるものであれば構わない。
バルブ制御部106は、エンジンブレーキ走行中における可変バルブ機構25のバルブタイミングおよびバルブリフト量の少なくとも一方を最適に調整する。バルブ制御部106は、予め設定されているバルブタイミングのタイミングマップ、もしくはバルブリフト量のバルブリフト量マップに基づいてバルブタイミングやバルブリフト量を制御する。このタイミングマップおよびバルブリフト量マップは、例えばエンジン回転速度NeやエンジントルクTeなどをパラメータとするマップであり、デコンプを実行する場合には、バルブタイミングやバルブリフト量を調整することで、エンジン24の気筒内の圧力が減圧されて、NV悪化回転速度領域が狭められる。
モータリング制御部108は、エンジンブレーキ走行中のエンジン回転速度Neが、前記目標エンジン回転決定部104によって決定された目標回転速度Ne*となるように第1電動機MG1によって制御し、エンジン回転速度Neが目標回転速度Ne*となると、所定の待機時間Tだけその目標回転速度Ne*で維持する。そして、所定の待機時間Tが経過すると、モータリング制御部108は、第1電動機MG1を制御して、NV悪化回転速度領域をエンジン回転速度Neが速やかに通過するように制御する。
ここで、所定の待機時間Tは、その待機時間経過した後に第1電動機MG1によってエンジン回転速度NeをNV悪化回転速度領域の下限速度N1_Lまで引き下げても、ピニオン回転速度Npinの上限回転速度Npin_maxに到達しない時間に設定されている。モータリング制御部108は、エンジン回転速度Neを下限速度N1_Lまで低下させたときに、ピニオン回転速度Npinが上限回転速度Npin_max以下となる車速V1を算出し、車速Vがその車速V1以下となると、第1電動機MG1によるエンジン回転速度Neを開始する。従って、モータリング開始(エンブレ開始)時点でのピニオン回転速度Npinおよび車速Vが高いほど、低い場合に比べてエンジン回転速度Neを目標回転速度Ne*で維持する待機時間Tが長くなる。待機時間Tが長くなれば、待機時間経過後の車速Vも低下しているためにピニオン回転速度Npinも低下しており、エンジン回転速度Neを第1電動機MG1によって低下させたときに、ピニオン回転速度Npinを上限回転速度Npin_max以下とすることができる。
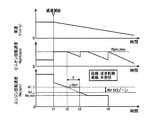
図3は、モータリング制御実行中の作動状態を示すタイムチャートである。図3において、横軸は経過時間を示し、縦軸が上から順番に、車速V(m/s)、ピニオン回転速度Npin(rpm)、およびエンジン回転速度Ne(rpm)をそれぞれ示している。t1時点において減速が開始されると、目標エンジン回転決定部104によって、エンジン回転速度Neの目標回転速度Ne*が決定され、エンジン回転速度Neがその目標回転速度Ne*となるようにモータリング制御部108によって制御される。このとき、バルブ制御部106も併せて実行されることで、NV悪化回転速度領域が適宜調整される。なお、図6においては、NV悪化上限回転速度N1_Uが目標回転速度Ne*に設定されている。
t1時点直後においては、ピニオン回転速度Npinが上限回転速度Npin_maxとなるまで、エンジン回転速度Neが第1電動機MG1によって急激に引き下げられている。そして、ピニオン回転速度Npinが上限回転速度Npin_maxの状態で維持されるようにエンジン回転速度Neが制御されている。t2時点において、エンジン回転速度NeがNV悪化回転速度領域の上限値であるNV悪化上限回転速度N1_Uに到達すると、エンジン回転速度NeがそのNV悪化上限回転速度N1_Uで待機時間Tだけ維持される。これより、エンジン回転速度NeがNV悪化回転速度領域を外れるので、こもり音や歯打ち音が抑制される。また、エンジン回転速度NeがそのNV悪化上限回転速度N1_Uで維持される間(t2時点〜t3時点)に車速Vが低下することからピニオン回転速度Npinも低下する。そして、待機時間Tが経過するt3時点において、第1電動機MG1を制御することにより、エンジン回転速度NeがNV悪化回転速度領域を素早く通過しても、ピニオン回転速度Npinが上限回転速度Npin_max以下となる。また、t3時点以降にあっては、エンジン回転速度NeがNV悪化回転速度領域よりも低下し、予め設定されているエンジン24のモータリング最低回転速度Ne_minで一時的に保持された後、t4時点においてエンジン24が停止されている。
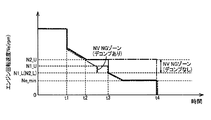
図4は、モータリング制御部108の他の態様である。例えば、エンジン24を停止させる際、t2時点においてエンジン回転速度Neを目標回転速度Ne*(N2_U)に制御すると、一点鎖線で示すように、エンジン回転速度Neを目標回転速度Ne*のままで維持し、エンジン回転速度Neを零回転まで低下させることができる車速Vとなると、t4時点においてエンジン24を停止させる。このように制御することで、エンジン回転速度Neを第1電動機MG1によって高い回転速度で長時間維持する分だけ燃費が低下するものの、エンジン回転速度Neの勾配変化が低減されるので、NV特性がさらに向上する。特に、NV悪化回転速度領域とモータリング最低回転速度Ne_minとが近い場合において、燃費悪化が顕著とならないため好適に実行される。
また、二点鎖線は、前記バルブ制御部106によるデコンプを実行した場合の態様である。デコンプが実行されない場合には、NV悪化回転速度領域がN2_L〜N2_Uの間となる。これに対して、デコンプが実施されると、NV悪化回転速度領域がN1_L(=N2_L)〜N1_Uの間となり、NV悪化回転速度領域が狭められている。これより、エンジン回転速度Neの目標回転速度Ne*がデコンプしない場合に比べて低回転速度となり、これに起因するエンジンブレーキ力の低下分だけ第1電動機MG1の回生量を増加することができるため燃費が向上する。また、NV悪化回転速度領域が狭められることで、第1電動機MGによってエンジン回転速度Neを目標回転速度Ne*に維持する待機時間T(頻度)も低減される。
図5は、電子制御装置100の制御作動の要部、すなわちモータリング走行中のNV特性の悪化を防止できる制御作動を説明するフローチャートである。このフローチャートは、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
先ず、モータリング判定部102に対応するステップS1(以下、ステップを省略する)において、モータリング走行中(エンジンブレーキ走行中)であるか否かが判定される。S1が否定される場合、本ルーチンは終了させられる。S1が肯定される場合、目標エンジン回転決定部104に対応するS2において、ピニオン回転速度Npinが上限回転速度Npin_max以下となる第1エンジン回転速度Ne1が算出される。目標エンジン回転速度104に対応するS3では、S2で算出された第1エンジン回転速度Ne1が、NV悪化回転速度領域にある(N1_L<Ne1<N1_U)か否かが判定される。
S3が否定される場合、目標エンジン回転速度104およびバルブ制御部106に対応するS5において、第1エンジン回転速度Ne1がNV悪化回転速度領域(N1_L〜N1_U)にないため、その第1エンジン回転速度Ne1が目標回転速度Ne*に決定される。そして、モータリング制御部108によって、エンジン回転速度Neが目標回転速度Ne*(=Ne1)に制御され、所定の待機時間Tだけその回転速度Ne1で維持した後に、NV悪化回転速度領域を速やかに通過させる。これより、エンジン回転速度NeがNV悪化回転速度領域に滞留する時間が短くなるため、NV特性が向上する。これと併行して、エンジン24のバルブタイミングやバルブリフト量が適宜調整されることで、エンジン24の気筒内の圧力がデコンプ(減圧)される。従って、NV悪化回転領域が回転速度領域(N2_L〜N2_U)から回転速度領域(N1_L〜N1_U)に狭められる。
S3が肯定される場合、目標エンジン回転速度104およびバルブ制御部106に対応するS4において、第1エンジン回転速度Ne1がNV悪化回転速度領域にある(N1_L<Ne1<N1_U)ので、NV悪化上限回転速度N1_Uが目標回転速度Ne*に決定される。そして、モータリング制御部108によって、エンジン回転速度Neが目標エンジン回転速度Ne*(N1_U)に制御され、所定の待機時間Tで維持した後に、NV悪化回転速度領域を速やかに通過させる。これより、エンジン回転速度NeがNV悪化回転速度領域に滞留する時間が短くなるため、NV特性が向上する。これと併行して、エンジン24のバルブタイミングやバルブリフト量が適宜調整されることで、エンジン24の気筒内の圧力がデコンプ(減圧)される。従って、NV悪化回転領域が回転速度領域(N2_L〜N2_U)から回転速度領域(N1_L〜N1_U)に狭められる。
上述のように、本実施例によれば、モータリング走行中(エンジンブレーキ走行中)にエンジン回転速度NeをNV悪化回転速度領域よりも低い回転速度に制御する際、エンジン回転速度NeをNV悪化回転速度領域より高い回転速度で維持することで、エンジン24のNV悪化回転速度領域での滞留を回避する。また、このエンジン回転速度NeをNV悪化回転速度領域より高い回転速度で維持する間に車速Vが低下するため、遊星歯車装置26のピニオン回転速度Npinも低下する。そして、エンジン回転速度Neを速やかに低下させることができるまで、遊星歯車装置26のピニオン回転速度Npinおよび車速Vが低下すると、第1電動機MG1によってエンジン回転速度Neを速やかに低下させて、NV特性の悪化を回避することができる。
また、本実施例によれば、エンジン回転速度NeをNV悪化回転速度領域よりも低い回転速度まで低下させる際、ピニオンギヤP0のピニオン回転速度Npinが高いほど、低い場合に比べてNV悪化回転速度領域よりも高い回転速度で維持する待機時間Tが長い。このようにすれば、ピニオンギヤP0のピニオン回転速度Npinが高いほど低い場合に比べてNV悪化回転速度領域よりも高い回転速度で維持する待機時間Tが長くなるため、車速Vの低下とともにピニオンギヤP0のピニオン回転速度Npinが低下する。従って、ピニオンギヤP0のピニオン回転速度Npinが高い場合であっても、ピニオンギヤP0のピニオン回転速度Npinが低下した時点で第1電動機MG1によるエンジン回転速度Neの低下が開始されるので、NV悪化回転速度領域の滞留時間が短くなり、NV特性の悪化が回避される。一方、ピニオン回転速度Npinが低い場合には、エンジン回転速度NeをNV悪化回転速度領域よりも高い回転速度で維持する時間も短くなるので、エンジン回転速度Neが速やかに低下する。このように、ピニオン回転速度Npinに応じて、エンジン回転速度NeをNV悪化回転速度領域よりも高い回転速度で維持する待機時間Tが最適に調整され、NV特性の悪化を回避しつつエンジン回転速度Neを速やかに低下することができる。
また、本実施例によれば、エンジン24のバルブタイミングおよびバルブリフト量の少なくとも1つを変更可能な可変バルブ機構25を備えており、そのエンジン24のバルブタイミングおよびバルブリフト量の少なくとも1つを制御することで、NV悪化回転速度領域において、エンジン24の気筒内の圧力を減圧するデコンプが実施される。このようにすれば、NV悪化回転速度領域において気筒内の圧力が減圧されるデコンプが実施されることで、エンジン24の回転抵抗が低減され、NV悪化回転速度領域が狭くなる。従って、目標回転速度Ne*が低下してエンジンブレーキ力が低下する分だけ第1電動機MG1の回生量を増加できるため燃費悪化も抑制される。
つぎに、本発明の他の実施例を説明する。なお、以下の説明において前述の実施例と共通する部分には同一の符号を付して説明を省略する。
本実施例では、蓄電装置32の充電容量SOCが予め設定されている上限値を超えてしまい、第1電動機MG1の充電制御(回生制御)が制限されている場合においてモータリング制御されるときの制御作動について説明する。
本実施例の目標エンジン回転決定部104は、蓄電装置32の充電が制限されている場合において、バッテリ放電要求量や要求制動力などに基づいて算出される第3エンジン回転速度Ne3を算出する。この第3エンジン回転速度Ne3は、第1電動機MG1によってその回転速度Ne3に制御することで要求される電力が放電され、且つ、要求される制動力(エンジンブレーキ力)が得られる回転速度となる。エンジン回転速度Neが高くなると、その回転速度に維持するために第1電動機MG1が消費する電力も増加し、エンジンブレーキ力も大きくなる。従って、第3エンジン回転速度Ne3がNV悪化上限回転速度N2_Uよりも高い回転速度となることで、蓄電装置32の放電および高いエンジンブレーキ力が確保される。なお、バッテリ放電要求量は、例えば現時点の充電容量SOCと予め設定されている許容充電容量との差分等に基づいて算出され、要求制動力は、例えばブレーキペダルの踏み込み量などに基づいて算出される。
そして、目標エンジン回転決定部104は、算出された第3エンジン回転速度Ne3が、NV悪化回転速度領域(N2_L〜N2_U)のNV悪化上限回転速度N2_Uよりも低いか否かを判定する。第3エンジン回転速度Ne3がNV悪化上限回転速度N2_Uよりも低い場合、エンジン24がNV特性の悪化するNV悪化上限回転速度N2_U以下の回転速度領域で作動しないように、目標エンジン回転決定部104は、上限回転速度N2_Uを目標エンジン回転速度Ne*に決定する。第3エンジン回転速度Ne3が上限回転速度N2_U以上である場合、目標エンジン回転決定部104は、第3エンジン回転速度Ne3を目標エンジン回転速度Ne*に決定する。
ここで、本実施例では、基本的にはデコンプは実施されず、NV悪化回転速度領域(N2_L〜N2_U)は、デコンプ制御を実施しないことを前提とする回転速度(N2_L〜N2_U)となる。本実施例のように蓄電装置32の充電が制限されている場合、第1電動機MG1の回生(発電)による制動力が得られないため、その分だけ要求されるエンジンブレーキ力も大きくなる。これに対して、デコンプが実施されると、エンジン24の回転抵抗力が小さくなって得られるエンジンブレーキ力が小さくなってしまう。従って、蓄電装置32の充電が制限されている場合には、基本的にはデコンプは実施されず、デコンプが実施されないことを前提としたNV悪化回転速度領域(N2_L〜N2_U)に基づいて、第3エンジン回転速度Ne3がNV悪化回転速度領域にあるか否かが判定される。
図7は、本実施例に対応する電子制御装置100の制御作動の要部、すなわちモータリング走行中のNV特性の悪化を防止できる制御作動を説明するフローチャートである。
先ず、モータリング判定部102に対応するS1において、モータリング走行中であるか否かが判定される。S1が否定される場合、本ルーチンは終了させられる。S1が肯定される場合、目標エンジン回転決定部104に対応するS21において、バッテリ放電要求量、および要求制動力などに基づいて、第3エンジン回転速度Ne3が算出される。次いで、目標エンジン回転決定部104に対応するS22において、第3エンジン回転速度Ne3が上限回転速度N2_Uよりも低いか否かが判定される。
S22が否定される場合、目標エンジン回転決定部104およびバルブ制御部106に対応するS24において、第3エンジン回転速度Ne3がNV特性の悪化する回転速度領域にないため、第3エンジン回転速度Ne3が目標回転速度Ne*に決定される。そして、モータリング制御部108によって、エンジン回転速度Neが目標回転速度Ne*(=Ne3)に制御され、所定の待機時間Tだけその回転速度で維持した後に、NV悪化回転速度領域を速やかに通過させる。これより、エンジン回転速度NeがNV悪化回転速度領域に滞留する時間が短くなるため、NV特性が向上する。これと併行して、デコンプを実施しないようにエンジン24のバルブタイミングやバルブリフト量が適宜調整される。
S22が肯定される場合、目標エンジン回転決定部104およびバルブ制御部106に対応するS23において、第3エンジン回転速度Ne3が上限回転速度N2_Uよりも低い回転速度にあるので、NV特性の悪化を回避するため、上限回転速度N2_Uが目標回転速度Ne*に決定される。そして、モータリング制御部108によって、エンジン回転速度Neが上限回転速度N2_Uに制御され、所定の待機時間Tだけその回転速度で維持した後に、NV悪化回転速度領域を速やかに通過させる。これと併行して、デコンプを実施しないようにエンジン24のバルブタイミングやバルブリフト量が適宜調整される。
上述のように、本実施例によっても、前述した実施例と同様の効果を得ることができる。また、第1電動機MG1と電力の授受を行う蓄電装置32の充電が制限されている場合は、NV悪化回転速度領域よりも高い回転速度でエンジン回転速度Neを維持させた状態とする。このようにすれば、エンジン回転速度NeをNV悪化回転速度領域よりも高い回転速度で維持することで、NV特性の悪化を回避することができる。また、エンジン回転速度NeをNV悪化回転速度領域よりも高い回転速度で維持し続けることで、蓄電装置32の放電を促し、蓄電容量SOCを正常な値に戻すことができる。さらに、エンジン回転速度Neが高くなるので、エンジンブレーキ力も高くなり、所望する制動力を確保することができる。
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
例えば、前述の各実施例は、それぞれ独立して記載されているが、矛盾の生じない範囲で各実施例を適宜組み合わせて実施しても構わない。
また、前述の実施例では、第1エンジン回転速度Ne1がNV悪化回転速度領域にある場合、目標回転速度Ne*をNV悪化上限回転速度N1_Uとしたが、目標回転速度Ne*はNV悪化上限回転速度N1_Uよりも高い回転速度であれば構わない。また、第2エンジン回転速度Ne2および第3エンジン回転速度Ne3についても同様である。
また、前述の実施例では、差動機構が遊星歯車装置26で構成され、遊星歯車装置26のサンギヤS0(第1回転要素)が第1電動機MG1、キャリヤCA0(第2回転要素)がエンジン24、リングギヤR0(第3回転要素)が駆動輪18にそれぞれ連結されているが、差動機構は遊星歯車装置に限定されず、連結構成についてもこの実施例に限定されず適宜変更しても構わない。
また、前述の実施例では、可変バルブ機構25は、バルブのバルブタイミングおよびバルブリフト量を調整可能に構成され、これらバルブタイミングおよびバルブリフト量を調整することでデコンプされるものであったが、可変バルブ機構25は、バルブタイミングおよびバルブリフト量の何れか一方を調整に可能に構成されていれば足り、これらの一方を制御してデコンプ(減圧)するものであっても構わない。
また、前述の実施例では、エンジン24の気筒内の圧力を減圧するデコンプを実施することで、NVの悪化する回転速度領域を狭めているが、デコンプを必ずしも実施する必要はなく、デコンプを実施しなくとも構わない。
また、前述の実施例では、第1回転要素であるサンギヤS0が第1電動機MG1に直接連結されているが、歯車やベルト車等を介して動力伝達可能に連結されていても構わない。また、第2回転要素であるキャリヤCA0がダンパ装置38を介してエンジン24に連結されているが、さらに歯車やベルト車等を介して動力伝達可能に連結されていても構わない。また、第3回転要素であるリングギヤR0が差動歯車装置16を介して駆動輪18に連結されているが、さらに歯車やベルト車等を介して動力伝達可能に連結されていても構わない。
また、前述の実施例では、エンジン回転速度Neが目標回転速度Ne*で一定値に維持されているが、必ずしも一定値に限定されない。本発明は、エンジンブレーキ走行中のエンジン回転速度Neを、NV悪化回転速度領域よりも高い回転速度で維持するのであれば回転速度変化が生じても許容される。また、NV悪化回転速度領域を通過する際にも、指令値は急降下しているがこの指令値についても所定の勾配があっても構わない。
なお、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。