以下に、本発明に係る苗移植機の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能、且つ、容易なもの、或いは実質的に同一のものが含まれる。
〔実施形態〕
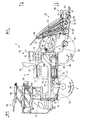
図1は、実施形態に係る苗移植機の側面図である。図2は、図1に示す苗移植機の平面図である。なお、以下の説明においては、前後、左右の方向基準は、苗移植機の操縦席からみて、車体の走行方向を基準として、前後、左右の基準を規定している。本実施形態に係る苗移植機1の走行車体2は、左右一対の前輪4と、同様に左右一対の後輪5とを有しており、走行時には各車輪が駆動する四輪駆動車としている。これにより、走行車体2は、圃場や道路を走行することが可能になっている。また、走行車体2の後部には、苗植付部昇降機構40によって昇降可能な苗植付部50が備えられている。
この走行車体2は、車体の略中央に配置されたメインフレーム7と、このメインフレーム7の上に搭載されたエンジン10と、エンジン10の動力を駆動輪と苗植付部50とに伝える動力伝達装置15と、を備えている。つまり、本実施形態に係るこの苗移植機1では、動力源であるエンジン10で発生した動力は、走行車体2を前進や後進させるために用いるのみでなく、苗植付部50を駆動させるためにも使用され、ディーゼル機関やガソリン機関等の熱機関が用いられる。
また、エンジン10は、走行車体2の左右方向における略中央で、且つ、作業者が乗車時に足を載せるフロアステップ26よりも上方に突出させた状態で配置されている。また、フロアステップ26は、走行車体2の前部とエンジン10の後部との間に渡って設けられてメインフレーム7上に取り付けられており、その一部が格子状になることにより、靴に付いた泥を圃場に落とせるようになっている。また、このフロアステップ26の後方には、後輪5のフェンダを兼ねたリアステップ27が設けられている。このリアステップ27は、後方に向うに従って上方に向う方向に傾斜した傾斜面を有しており、エンジン10の左右それぞれの側方に配置されている。
エンジン10は、これらのフロアステップ26とリアステップ27とから上方に突出しており、これらのステップから突出している部分には、エンジン10を覆うエンジンカバー11が配設されている。即ち、エンジンカバー11は、フロアステップ26とリアステップ27とから上方に突出した状態で、エンジン10を覆っている。
また、走行車体2には、エンジンカバー11の上部に操縦席28が設置されており、操縦席28の前方で、且つ、走行車体2の前側中央部には、操縦部30が配設されている。この操縦部30は、フロアステップ26の床面から上方に突出した状態で配置されており、フロアステップ26の前部側を左右に分断している。
操縦部30の前部には、開閉可能なフロントカバー31が設けられている。また、操縦部30の上部には、操作装置を作動させる操作レバー等や計器類、ハンドル32が配設されている。このハンドル32は、作業者が前輪4を操舵操作することにより走行車体2を操舵する操舵部材として設けられており、操縦部30内の操作装置等を介して前輪4を転舵させることが可能になっている。また、操作レバーとしては、走行車体2の前後進と走行出力を切替操作する変速操作部材である変速レバー35と、走行車体2の走行速度を、走行する場所に応じた速度に切り替える副走行操作部材である副変速レバー38とが、機体右側と左側に配設されている。
また、フロアステップ26における操縦部30の左右それぞれの側方に位置する部分には、補給用の苗を載せておく予備苗載台65が配置されている。この予備苗載台65は、フロアステップ26の床面から突出した支持軸(鉛直軸)によって回転自在に支持されており、作業者の手、または電動モータ等の回動部材によって回動させることが可能になっている。
また、動力伝達装置15は、エンジン10から伝達される駆動力を変速する変速装置である油圧式無段変速機16と、この油圧式無段変速機16にエンジン10からの動力を伝えるベルト式動力伝達機構17と、を有している。このうち、油圧式無段変速機16とは、HST(HydroStaticTransmission)と云われる静油圧式の無段変速装置として構成されている。このため、油圧式無段変速機16は、エンジン10からの動力で駆動する油圧ポンプによって油圧を発生させ、この油圧を油圧モータで機械的な力(回転力)に変換して出力する。これにより、油圧式無段変速機16は、エンジン10で発生する動力を、走行車体2を走行させる力に変換する。
その際に、油圧式無段変速機16は、回転力の方向や回転速度を変更することにより、走行車体2の前後進及び走行速度を変更することが可能になっており、変速レバー35は、この油圧式無段変速機16の出力及び出力方向を変更することによって、走行車体2の前後進及び走行速度を操作することが可能になっている。
この油圧式無段変速機16は、エンジン10よりも前方で、且つ、フロアステップ26の床面よりも下方に配置されており、本実施形態に係る苗移植機1では、走行車体2の上面から見て、エンジン10の前方に配置されている。
また、ベルト式動力伝達機構17は、エンジン10の出力軸に取り付けたプーリと、油圧式無段変速機16の入力軸に取り付けたプーリと、双方のプーリに巻き掛けたベルトと、さらに、このベルトの張力を調整するテンションプーリと、を備えている。これにより、ベルト式動力伝達機構17は、エンジン10で発生した動力を、ベルトを介して油圧式無段変速機16に伝達可能になっている。
さらに、動力伝達装置15は、ベルト式動力伝達機構17を介して油圧式無段変速機16に伝達され、油圧式無段変速機16で変速したエンジン10からの駆動力を各部に伝達する伝動装置であるミッションケース18を有している。このミッションケース18は、路上走行時や植付時等における走行車体2の作業速度を切り替える副変速機構(図示省略)を内設しており、メインフレーム7の前部に取り付けられている。副変速レバー38は、ミッションケース18内の副変速機構を操作することにより、走行車体2の走行速度を切り替えることが可能になっている。ミッションケース18は、ベルト式動力伝達機構17と油圧式無段変速機16とを介して伝達されたエンジン10からの出力を、当該ミッションケース18内の副変速機構で変速して、前輪4と後輪5への走行用動力と、苗植付部50への駆動用動力とに分けて出力可能になっている。
このうち、走行用動力は、一部が左右の前輪ファイナルケース21を介して前輪4に伝達可能になっており、残りが左右の後輪ギヤケース22を介して後輪5に伝達可能になっている。左右それぞれの前輪ファイナルケース21は、ミッションケース18の左右それぞれの側方に配設されており、左右の前輪4は、車軸を介して左右の前輪ファイナルケース21に連結されている。また、この前輪ファイナルケース21は、ハンドル32の操舵操作に応じて駆動し、前輪4を転舵させることが可能になっている。同様に、左右それぞれの後輪ギヤケース22には、車軸を介して後輪5が連結されている。一方、駆動用動力は、走行車体2の後部に設けた植付クラッチ(図示省略)に伝達され、この植付クラッチの係合時に植付伝動軸(図示省略)によって苗植付部50へ伝達される。
また、走行車体2の後部に備えられる苗植付部50を昇降させる苗植付部昇降機構40は、昇降リンク装置41を有しており、苗植付部50は、この昇降リンク装置41を介して走行車体2に取り付けられている。この昇降リンク装置41は、走行車体2の後部と苗植付部50とを連結させる平行リンク機構42を備えている。この平行リンク機構42は、上リンクと下リンクとを有しており、これらのリンクが、メインフレーム7の後部端に立設した背面視門型のリンクベースフレーム43に回動自在に連結され、各リンクの他端側が苗植付部50に回転自在に連結されることにより、苗植付部50を昇降可能に走行車体2に連結している。
また、苗植付部昇降機構40は、油圧によって伸縮する油圧昇降シリンダ44を有しており、油圧昇降シリンダ44の伸縮動作によって、苗植付部50を昇降させることが可能になっている。苗植付部昇降機構40は、その昇降動作によって、苗植付部50を非作業位置まで上昇させたり、対地作業位置(対地植付位置)まで下降させたりすることが可能になっている。
また、苗植付部50は、苗を植え付ける範囲を複数の区画、或いは複数の列で植え付けることができ、本実施形態に係る苗移植機1では、苗を6つの区画で植え付ける、いわゆる6条植の苗植付部50になっている。この苗植付部50は、植付装置60と、苗載置台51及びフロート47を備えている。このうち、苗載置台51は、複数条の苗を積載する苗載置部材として設けられており、走行車体2の左右方向において仕切られた植付条数分の苗載せ面52を有し、それぞれの苗載せ面52に土付きのマット状苗を載置することが可能になっている。これにより、苗載置台51に載置した苗が植え付けられて無くなるたびに、圃場外に用意している苗を取りに戻る必要が無く、連続した作業を行えるので、作業能率が向上する。
また、植付装置60は、苗載置台51に載置された苗を苗載置台51から取って圃場に植え付ける装置になっている。この植付装置60は、2条毎に1つずつ配設されており、回転可能なロータリケース63に、2条分の植込杆61を回転可能に備えている。即ち、複数の植付装置60は、それぞれ植付条が割り当てられている。このうち、ロータリケース63は、植付装置60に駆動力を供給する植付伝動ケース64に対して回転可能に連結されており、植付伝動ケース64は、エンジン10から苗植付部50に伝達された動力を、植付装置60に供給する。つまり、植付伝動ケース64には、2つのロータリケース63が、機体左右方向の両側に連結されており、苗植付部50は、この植付伝動ケース64を3つ備えている。
また、フロート47は、走行車体2の移動と共に、圃場面上を滑走して整地するものであり、走行車体2の左右方向における苗植付部50の中央に位置するセンターフロート48と、左右方向における苗植付部50の両側に位置するサイドフロート49と、を有している。
また、苗植付部50の下方側の位置における前側には、圃場の整地を行う整地用ロータ67が設けられている。この整地用ロータ67は、後輪ギヤケース22を介して伝達されるエンジン10からの出力によって回転可能に構成されている。
また、苗植付部50の左右両側には、次の植付条に進行方向の目安になる線を形成する線引きマーカ68が備えられている。即ち、線引きマーカ68は、苗移植機1が圃場内における直進前進時に、圃場の畦際で転回した後に直進前進する際の目印を圃場上に線引きする。この線引きマーカ68は、マーカモータ(図示省略)によって作動し、走行車体2が旋回するごとに、左右の線引きマーカ68が入れ替わって作動することができるように構成されている。この左右の線引きマーカ68の入れ替えは、マーカモータが接続されるコントローラ(図示省略)によって行う。即ち、コントローラは、走行車体2の旋回時に、左右の線引きマーカ68を交互に作動状態と非作動状態とに切り替えるマーカ切替装置としても設けられている。なお、左右の線引きマーカ68の線引き作用部は、図1及び図2に示す通り、円盤の外周部に複数の突起体を設け、回転自在にロッド部に装着したものとすると、圃場面との接地抵抗により確実に圃場面に線を形成することができ、次の植付作業位置での直進作業が行い易くなり、作業能率が向上する。
また、走行車体2における操縦席28の後方には、施肥装置70が搭載されている。この施肥装置70は、肥料を貯留する貯留ホッパ71と、貯留ホッパ71から供給される肥料を設定量ずつ繰り出す繰出し装置72と、繰出し装置72により繰り出される肥料を圃場に供給する施肥通路である施肥ホース74と、施肥ホース74に搬送風を供給することにより、施肥ホース74内の肥料を苗植付部50側に移送する起風装置であるブロア73と、を有している。さらに、施肥装置70は、苗植付部50の下方に配設されると共に、施肥ホース74によって肥料が移送される施肥ガイド75と、施肥ガイド75の前側に設けられると共に、施肥ホース74によって移送された肥料を、苗植付条の側部近傍に形成される施肥溝内に落とし込む作溝器76と、を有している。
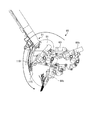
図3は、図1に示すミッションケースの断面図である。ミッションケース18は、内部に変速機構81を備えており、変速機構81には、油圧式無段変速機16から出力された駆動力のミッションケース18への伝動軸であるミッションケース入力軸80が接続されている。これにより、ミッションケース18には、油圧式無段変速機16で変速したエンジン10からの駆動力が伝達可能になっている。
また、ミッションケース18には、ミッションケース18に伝達された駆動力を植付装置60側に伝動するか否かを切り替えることにより、ミッションケース18から植付装置60への伝動を切り替える植付クラッチ機構82が備えられている。この植付クラッチ機構82は、ミッションケース18に内設される変速機構81と、ミッションケース18から植付装置60側への出力軸であるミッションケース出力軸83との間での動力の伝達と遮断との切り替えが可能になっている。また、植付クラッチ機構82の近傍には、植付クラッチ機構82の入切を検知する入切検知部材である植付クラッチセンサ89が備えられている。
このミッションケース出力軸83には、ミッションケース出力軸83によって出力される駆動力が伝達されることにより、エンジン10で発生した駆動力を植付装置60に伝動する植付駆動機構である植付ドライブシャフト87が接続されている。植付ドライブシャフト87は、ミッションケース出力軸83に対してメカロック防止クラッチ84を介して接続されている。このメカロック防止クラッチ84は、ミッションケース出力軸83から植付ドライブシャフト87への通常の駆動力の伝達時における回転方向では、係合することにより回転駆動力を伝達でき、反対方向の回転時にはスリップすることよりミッションケース出力軸83と植付ドライブシャフト87とが相対回転するようになっている。即ち、メカロック防止クラッチ84は、ワンウェイクラッチとして設けられている。
植付ドライブシャフト87には、回転部材である回転ギア88が装着されており、回転ギア88は、植付ドライブシャフト87と一体となって回転可能に装着されている。この回転ギア88には、補助駆動装置である補助伝動モータ85の出力軸に取り付けられるピニオンギア86と噛み合っている。これにより、植付ドライブシャフト87は、補助伝動モータ85の駆動時に補助伝動モータ85が発生する駆動力が、ピニオンギア86と回転ギア88とを介して伝達されることにより、回転駆動することが可能になっている。
図4は、植付装置が取り付けられる苗植付体の平面図である。苗植付部50が有する複数の植付装置60は、植付伝動ケース64を支持すると共に、植付装置60に駆動力を伝動可能に構成される苗植付体90に備えられている。苗植付体90は、内部に伝動機構(図示省略)を有するメインケース91を有しており、メインケース91内の伝動機構には、植付ドライブシャフト87が連結されている。これにより、メインケース91内には、ミッションケース18から出力された駆動力が、植付ドライブシャフト87によって伝達可能になっている。また、メインケース91は、植付ドライブシャフト87から伝達された駆動力を出力する植付伝動軸92を支持しており、植付伝動軸92は、機体左右方向に延在している。
複数の植付伝動ケース64は、メインケース91からの出力軸である植付伝動軸92にそれぞれ前端側が連結されている。各植付伝動ケース64は、内部にチェーン駆動機構(図示省略)を備えており、それぞれの植付伝動ケース64の後端側には、駆動力をロータリケース63に伝達する植付駆動軸93が、機体左右方向両側に突出している。植付伝動軸92から植付伝動ケース64に入力された駆動力は、内部のチェーン駆動機構によって植付駆動軸93に伝達され、植付駆動軸93によって出力される。植付駆動軸93には、ロータリケース63が連結されており、ロータリケース63及び植込杆61は、この植付駆動軸93から出力される駆動力により駆動する。
また、メインケース91には、植付駆動軸93の回転角度を検出する回転センサ94が設けられている。この回転センサ94は、植付駆動軸93の回転角度を検出することにより、植付装置60の停止時に、植付装置60の停止位置を検知する停止位置検知部材として設けられている。
また、メインケース91には、植付ドライブシャフト87から駆動力を受けて作動し、苗載置台51を機体左右方向に往復摺動させる摺動機構であるリードカム機構100が備えられている。このリードカム機構100は、リードカム軸101と、摺動軸102とを備えている。リードカム軸101は、長手方向が左右方向と平行な状態で、左右方向の移動が規制され、且つ、軸心回りの回転が許容されて、メインケース91に支持されている。リードカム軸101は、植付ドライブシャフト87からエンジン10の駆動力が伝動されて、エンジン10からの駆動力により軸心回りに回転する。即ち、植付ドライブシャフト87は、リードカム軸101にエンジン10からの駆動力を伝動する。
摺動軸102は、中央部がメインケース91に収容されて支持されている。摺動軸102は、リードカム軸101のカムに係合するリードカムを固着して、リードカム軸101に接触してリードカム軸101の回転により機体左右方向に往復移動する。摺動軸102は、両端が苗載置台51に連結されており、リードカム軸101の回転により左右方向に往復移動すると、苗載置台51を機体左右方向に往復摺動させる。これらのように、摺動軸102の機体左右方向の往復移動によって摺動軸102と共に往復移動する苗載置台51の移動範囲における端部付近には、苗載置台51の左右端部への到達を検知する端部検知部材である端寄せスイッチ105が、苗載置台51の左右両端側に配設されている。
図5は、図1に示す植付装置の詳細図である。図6は、図5のA−A矢視図である。植付装置60のロータリケース63は、複数の植付用ギヤ(図示省略)からなる不等速伝動機構を内装しており、不等速伝動機構に対しては、植付伝動ケース64から供給された駆動力を、植付駆動軸93によって伝達可能になっている。また、植込杆61は、ロータリケース63に内装される不等速伝動機構の出力軸に連結されており、1つのロータリケース63に対して、植付駆動軸93を中心として点対称となる2箇所に配設されている。この植込杆61は、植付駆動軸93を中心とするロータリケース63の回転時に、ロータリケース63の回転速度に対して、不等速伝動機構により回転速度が不等速となって回転することが可能になっている。
図7は、図1に示す苗載置台の下端付近の側面図である。図8は、図7のB−B矢視図である。苗載置台51の下部には、植付装置60が苗載置台51から苗を取った際に、苗の姿勢を整える苗案内部材である苗ガイド110が配設されている。この苗ガイド110は、1つのロータリケース63について1組が配設されており、1組の苗ガイド110は、苗載置台51の下端から下方に延びる左右一対の部材から構成されている。植付装置60の駆動時には、ロータリケース63に備えられる植込杆61が、苗ガイド110を構成する一対の部材間を通過しながら駆動する。これにより、苗ガイド110は、植付装置60が苗載置台51から苗を取って苗ガイド110を通過する際に、植込杆61で取った苗の姿勢を整えることが可能になっている。
このように構成される苗ガイド110は、機体上下方向における位置によって、左右一対の部材の間隔が異なっており、下端部よりも上方位置には、左右間隔が最も狭くなる幅狭部111が形成されている。即ち、苗ガイド110は、幅狭部111より機体上方側や機体下方側における左右の間隔よりも、幅狭部111の方が左右の部材の間隔が狭くなっている。
また、苗ガイド110には、植付装置60の通過を検知する通過検知部材115が設けられている。この通過検知部材115は、例えば、一対の部材の互いに対向する面に配設される電極板によって構成され、電極板に他の部材が接触した場合における電極板間での通電量の変化に基づいて、植付装置60の通過を検知することが可能になっている。また、通過検知部材115は、植付装置60の通過を、このように電極板間での通電量の変化に基づいて検知するため、植付装置60が苗を保持しているか否かも判定することが可能になっている。このように構成される通過検知部材115は、苗ガイド110の幅狭部111に配置されている。
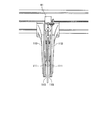
図9は、図2に示す変速レバーのガイドをするレバーガイド溝の平面図である。走行車体2の前後進の切り替えが可能な変速レバー35は、当該変速レバー35のガイドを行うレバーガイド溝120に沿って操作を行うことが可能になっている。レバーガイド溝120は、走行車体2を前進させる状態に変速レバー35を切り替える際における変速レバー35のガイド部分である前進位置121と、走行車体2を後進させる状態に変速レバー35を切り替える際における変速レバー35のガイド部分である後進位置123と、を有している。これらの前進位置121と後進位置123とは、機体前後方向に延びる溝として形成されており、前進位置121と後進位置123とは、機体左右方向における位置が異なる位置になっている。
このように機体左右方向の位置が異なる前進位置121の後端と、後進位置123の前端とは、機体左右方向に延びる溝によって接続されており、この左右方向に延びる溝は、レバーガイド溝120が有する中立位置122として形成されている。レバーガイド溝120の中立位置122は、変速レバー35を前進から後進に切替操作したり、後進から前進に切替操作したりするときに変速レバー35を通す位置になっており、この中立位置122には、変速レバー35を検知する位置検知部材であるレバーセンサ125が配設されている。レバーセンサ125は、中立位置122の機体左右方向における、後進位置123側の端部側に配設されており、この位置で変速レバー35を検知することにより、変速レバー35が前進から後進に切替操作される状態であることを検知することが可能になっている。
また、レバーガイド溝120には、変速レバー35の後進側への操作を規制する操作規制部材である規制ピン126と、規制ピン126を入切させる規制入切部材である規制ソレノイド127とが設けられている。このうち、規制ピン126は、レバーガイド溝120の後進位置123における中立位置122寄りの端部付近に配設されており、後進位置123の壁面から後進位置123内に突出したり、壁面側に引っ込んで退避したりすることが可能になっている。また、規制ソレノイド127は、この規制ピン126を、レバーガイド溝120の後進位置123の溝幅方向に移動させることにより、規制ピン126を後進位置123内に突出させたり、後進位置123内から退避させたりすることが可能になっている。このように設けられる規制ピン126は、後進位置123内に突出した状態では、変速レバー35が中立位置122から後進位置123位置に移動することを規制することができ、中立位置122から後進位置123への変速レバー35の切替操作を規制することができる。
図10は、図1に示す苗移植機の要部構成図である。操縦部30には、ハンドル32等の他に、補助伝動モータ85を入切する補助駆動操作部材である補助駆動スイッチ130が配設されている。この補助駆動スイッチ130は、苗移植機1に搭載される各機器を制御する制御装置140に接続されている。制御装置140は、各種の信号を電気信号によって送受信したり、各種の演算処理を行ったりする電子制御装置によって構成されており、苗移植機1の各部の制御が可能になっている。制御装置140は、補助駆動スイッチ130の操作状態に応じて補助伝動モータ85の駆動を制御することが可能になっている。
また、植付クラッチ機構82の入切を検知する植付クラッチセンサ89や、植付装置60の停止位置を検知する回転センサ94、苗載置台51の左右端部への到達を検知する端寄せスイッチ105、苗ガイド110に設けられて植付装置60の通過を検知する通過検知部材115、変速レバー35の検知を行うレバーセンサ125も、制御装置140に接続されている。
また、変速レバー35の切替操作を規制する規制ピン126を作動させる規制ソレノイド127も制御装置140に接続されており、制御装置140からの制御信号によって作動することにより、規制ピン126をレバーガイド溝120内に突出させたり退避させたりすることが可能になっている。さらに、制御装置140には、エンジン10で発生した駆動力の、施肥装置70への伝達や遮断を切り替える施肥クラッチ(図示省略)を作動させる施肥クラッチモータ135が接続されている。
本実施形態に係る苗移植機1は、以上のような構成からなり、以下、その作用について説明する。苗移植機1の運転時は、エンジン10で発生する動力によって、走行車体2の走行と、苗載置台51に載せた苗の植付作業を行う。この植付作業は、回転軸が左右方向になる向きで植付装置60全体が回転しながら、植込杆61も回転することにより、苗載置台51に載せられた苗を順次植込杆61で取り、取った苗を徐々に圃場に植え付ける。その際に、苗載置台51を、苗載置台51に載置する1条分の機体左右方向の幅の範囲内で機体左右方向に往復移動させることにより、各植付装置60は、苗載置台51においてそれぞれの植付装置60に対応する部分から苗を取り出し、圃場に植え付ける。即ち、各植付装置60は、苗載置台51の所定の条に対応する部分から苗を取り出して、所定の条に苗を植え付ける。植付作業時は、このように植付装置60を作動させながら圃場内を走行車体2で走行することにより、複数の列状に苗を植え付ける。
走行車体2の走行時には、エンジン10で発生した動力はベルト式動力伝達機構17に伝達され、ベルト式動力伝達機構17から油圧式無段変速機16に伝達されて、油圧式無段変速機16で所望の回転速度や回転方向、トルクに変換されて出力される。油圧式無段変速機16から出力された動力は、ミッションケース18に伝達され、路上走行時の走行速度に適した回転速度、または苗の植え付け時の走行速度に適した回転速度にミッションケース18内で変速されて、前輪4側や後輪5側に出力される。
また、ミッションケース18から出力される動力の一部は、苗植付部50側にも伝達され、苗植付部50での植付作業にも用いられる。具体的には、ミッションケース入力軸80によってミッションケース18内の変速機構81に伝達された駆動力は、変速機構81で変速され、植付クラッチ機構82の係合時に、ミッションケース出力軸83から出力される。ミッションケース出力軸83から出力された駆動力は、植付ドライブシャフト87に伝達され、植付ドライブシャフト87によって苗植付体90に伝達される。
苗植付体90では、植付ドライブシャフト87によって伝達された駆動力を、植付伝動軸92によって各植付伝動ケース64に伝達し、植付伝動ケース64から、それぞれの植付伝動ケース64に連結されている植付装置60に伝達する。植付装置60は、このように伝達された駆動力により回転駆動する。
また、苗植付体90にはリードカム機構100が備えられており、リードカム機構100は、植付ドライブシャフト87によって苗植付体90に伝達された駆動力により作動し、摺動軸102が機体左右方向に往復移動する。これにより、摺動軸102に連結されている苗載置台51も機体左右方向に往復移動する。苗の植え付け時には、このように苗載置台51が機体左右方向に往復移動しながら、回転駆動する植付装置60の植込杆61で、苗載置台51に載置されている苗を順次取り、圃場に植え付ける。
これらのように、植付装置60は、ミッションケース18から出力された駆動力により駆動するが、植付クラッチ機構82が、動力を伝動しない状態になったり、油圧式無段変速機16が中立になってミッションケース18に駆動力が伝達されない状態になったりしたときは、ミッションケース18から植付装置60側には、駆動力が伝達されなくなる。この場合は、制御装置140は、補助伝動モータ85を駆動させることにより、植付装置60を、予め設定されている設定位置に移動させて停止させる。
この場合における設定位置は、各ロータリケース63が、それぞれのロータリケース63に設けられる2つの植込杆61が植付駆動軸93を挟んで概ね前後方向に位置する位置関係になり、2つの植込杆61における苗を取る部分が、概ね前方を向く向きになる状態になっている。苗植付体90に備えられる回転センサ94は、植付伝動軸92の回転角度を検知しており、制御装置140は、回転センサ94で検知した植付伝動軸92の回転角度より、植付装置60の停止位置、即ち、植付装置60の停止状態を検知することが可能になっている。植付装置60に駆動力が伝達されなくなったときに、回転センサ94が検知した植付装置60の停止位置が設定位置でないときには、制御装置140は、補助伝動モータ85を駆動させることにより、植付装置60を設定位置に移動させる。
補助伝動モータ85による植付装置60の移動について説明すると、補助伝動モータ85を駆動させると、補助伝動モータ85の出力軸に取り付けられるピニオンギア86と噛み合っている回転ギア88が回転し、回転ギア88と共に植付ドライブシャフト87が回転する。この場合、植付ドライブシャフト87とミッションケース出力軸83とは、メカロック防止クラッチ84を介して接続されているため、ミッションケース出力軸83が回転しない状態でも、ミッションケース出力軸83が停止したまま植付ドライブシャフト87を回転させることができる。
補助伝動モータ85で発生した駆動力は、このように植付ドライブシャフト87が回転することにより、苗植付体90に伝達される。苗植付体90では、このように伝達された駆動力が植付伝動軸92に伝達され、植付駆動軸93から出力されることにより、植付装置60に伝達される。これにより、植付装置60は回転する。この場合も、回転センサ94は植付伝動軸92の回転角度を検知して制御装置140に伝達する。制御装置140は、回転センサ94で検知した回転角度に基づいて、植付装置60の位置が設定位置になったことを検知したら、補助伝動モータ85を停止させる。これにより、植付装置60を設定位置まで移動させて停止させる。
また、これらのように、植付作業中に、エンジン10の駆動力が植付装置60に伝達されなくなり、補助伝動モータ85を駆動させる状態になったら、制御装置140は、施肥クラッチモータ135を駆動させ、施肥クラッチを「切」の状態にする。これにより、施肥装置70にも駆動力が伝達されなくなるため、施肥装置70は施肥を停止する。このように、エンジン10の駆動力が植付装置60に伝達されなくなり、植付装置60が作動しない状態になったら施肥装置70を停止させることにより、植付装置60で植え付けが行われていない状態で施肥が行われることを防ぐことができる。
植付作業中に植付装置60に駆動力が伝動されなくなる運転状態としては、例えば、後進時が挙げられる。詳しくは、植付作業中に走行車体2を後進させる場合には、作業者が変速レバー35を前進位置121から、中立位置122を介して後進位置123に移動させる切替操作を行う。その際に、中立位置122に配設されているレバーセンサ125は、変速レバー35が中立位置に122に移動したときに、変速レバー35を検知する。レバーセンサ125が変速レバー35を検知すると、苗植付部50が上昇すると共に、植付クラッチ機構82が切れて、植付装置60には駆動力が伝動されなくなる。この場合、補助伝動モータ85を駆動させることにより、植付装置60を設定位置まで移動させて停止させる。
ここで、規制ソレノイド127は、苗移植機1が植付作業中で、且つ、変速レバー35が前進位置121に位置している場合は、規制ピン126をレバーガイド溝120に位置させるように作動する。制御装置140は変速レバー35を前進から後進に切り替える際に、レバーセンサ125が変速レバー35を検知することにより、補助伝動モータ85が植付装置60を設定位置まで回転させたことを回転センサ94が検知したら、規制ピン126を規制解除位置に移動させるように規制ソレノイド127を作動させる。即ち、規制ソレノイド127は、レバーガイド溝120内から規制ピン126を退避させるように作動する。これにより、変速レバー35は、植付装置60が設定位置で停止した状態になってから、後進位置123に切り替えることが可能になる。
一方、レバーセンサ125によって、後進から前進への変速レバー35の移動を検知したら、制御装置140は、規制ピン126を規制位置に移動させるように規制ソレノイド127を作動させる。つまり、変速レバー35が後進位置123から前進位置121の方向に切り替えられることをレバーセンサ125で検知したら、規制ソレノイド127は、規制ピン126がレバーガイド溝120の後進位置123内に突出するように作動する。これにより、苗の植付作業時には、植付装置60が設定位置で停止している状態以外では、変速レバー35を後進位置123に切り替えることができなくなり、植付装置60が停止していない状態で走行車体2を後進させることができなくなる。
また、植付装置60を作動させることができる補助伝動モータ85は、操縦部30に配設される補助駆動スイッチ130を操作することによっても駆動することができる。このため、植付装置60は、エンジン10を停止している状態でも、補助伝動モータ85で発生する駆動力により動かすことができる。即ち、エンジン10の停止時に、補助駆動スイッチ130を入操作すると、補助伝動モータ85は駆動し、補助伝動モータ85で発生した駆動力は、植付ドライブシャフト87によって植付装置60側に伝達され、補助伝動モータ85が駆動力を発生している間、植付装置60は作動する。
また、補助伝動モータ85で発生した駆動力は、リードカム機構100にも伝達され、リードカム機構100は、この駆動力によって、苗載置台51を機体左右方向に往復摺動させる。苗載置台51が機体左右方向に移動し、移動範囲における端部に到達した場合、この到達を、端寄せスイッチ105で検知する。苗載置台51が移動範囲の端部に到達したことを端寄せスイッチ105で検知したら、制御装置140は、補助伝動モータ85を停止させる。これにより、苗載置台51は、機体左右方向における端部の位置で停止する。
このように、補助伝動モータ85で発生した駆動力によって移動する苗載置台51を、移動範囲における端部で停止させる際には、制御装置140は、苗ガイド110に設けられる通過検知部材115が、植付装置60の通過を検知する状態になる位置に植付装置60が移動するまで、補助伝動モータ85を作動させる。つまり、制御装置140は、苗ガイド110を通過する植込杆61を、通過検知部材115で検知するまで補助伝動モータ85を作動させる。
図11は、補助伝動モータの駆動力で作動する植付装置が苗を保持している場合の説明図である。植付装置60を検知する通過検知部材115は、通過検知部材115を構成する電極板間の通電量の変化によって植付装置60の通過を検知するため、植付装置60が苗を保持しているか否かを判定することが可能になっている。つまり、土は電気抵抗が大きいため、植付装置60の植込杆61が苗を保持して苗ガイド110を通過する場合、苗についている土が抵抗となり、通過検知部材115を構成する電極板間でほぼ絶縁状態になるため、これにより、植付装置60が苗を保持しているか否かを判定することができる。
補助伝動モータ85の駆動力で作動する植付装置60を、通過検知部材115で検知する際には、これにより苗を保持しているか否かを判定し、植付装置60が苗を保持していると判定したときは、すぐに補助伝動モータ85を停止させる。これにより、植付装置60は、苗を保持している植込杆61が、苗ガイド110内における通過検知部材115が配設されている部分に位置する状態で停止する。
つまり、通過検知部材115は、苗ガイド110の幅狭部111に配設されているため、苗を保持している植込杆61が、苗ガイド110の幅狭部111に位置する状態で停止する。これにより、植付装置60は、植込杆61で保持する苗が、幅狭部111によっても保持されるため、苗を落とすことなく保持状態を維持することができる。このため、植付作業を再開する際には、ロータリケース63に設けられる2つの植込杆61のうち、植付装置60の停止状態において機体前方側に位置して苗を保持している植込杆61である前方側植込杆61aで保持している苗を植え付けることができる。
図12は、補助伝動モータの駆動力で作動する植付装置が苗を保持していない場合の説明図である。一方、補助伝動モータ85の駆動力で作動する植付装置60を通過検知部材115で検知した際に、植付装置60が苗を保持していないと判定したときは、回転センサ94が設定位置を検知したら、補助伝動モータ85を停止させる。つまり、植付装置60が苗を保持していないと判定したときは、走行車体2の後進時等に植付装置60を停止させる際における植付装置60の設定位置と同じ位置まで植付装置60が移動したら、補助伝動モータ85を停止させる。この場合、植付作業の再開時は、ロータリケース63に設けられる2つの植込杆61のうち、植付装置60の停止状態において機体後方側に位置する植込杆61である後方側植込杆61bで、苗載置台51の苗を取って植え付けるところから、植え付けを再開する。
以上の実施形態に係る苗移植機1は、植付作業時に植付装置60に駆動力が伝達されなくなった際に、植付装置60が設定位置で停止していないときには、補助伝動モータ85によって植付装置60を設定位置まで移動させることができる。このため、極低速で回転しているエンジン10の駆動力によって植付装置60が作動しているときに植付装置60に駆動力が伝達されなくなり、植付装置60の慣性力が小さい場合でも、植付装置60を設定位置まで移動させることができる。この結果、植付装置60の作動時における駆動力の伝達状態に関わらず、植付装置60の停止時には、予め設定された位置で停止させることができる。
また、植付装置60を設定位置で停止させることにより、植付装置60が土中に入り込んだ状態で停止することを防止できるので、植付装置60の植込杆61に多くの泥土が付着することを防止できる。これにより、植付装置60によって苗載置台51から苗を取る際に、植込杆61で苗を取ることを、植込杆61に付着した泥土によって妨げられることを防止できる。この結果、苗を確実に圃場に植え付けることができる。
また、植付装置60の停止時には、自動的に設定位置まで植付装置60を移動させて停止させることができ、植付クラッチ機構82を切って植付装置60への伝動を遮断することにより、油圧式無段変速機16からミッションケース18に駆動力が伝動される状態となっても、植付装置60が回転しない状態にすることができる。この結果、植付装置60の不使用時に、油圧式無段変速機16からミッションケース18に駆動力が伝動する状態になった場合に、植付装置60に付着した泥土が周囲に飛び散ることを防止できる。
また、回転ギア88を補助伝動モータ85で回転させて植付装置60に駆動力を伝動することにより、油圧式無段変速機16の停止や植付クラッチ機構82を切操作しつつ、植付装置60を設定位置まで回転させることができる。これにより、植付装置60の停止時における余分な操作が不要となり、操作性が向上すると共に、植付装置60に泥土が付着することが防止される。また、補助伝動モータ85を作動させると、いつでも植付装置60を作動させることができるので、メンテナンス作業時に油圧式無段変速機16の出力操作や植付クラッチ機構82の入操作が不要になる。また、エンジン10が停止している場合でも、エンジン10を始動することなく、メンテナンス時の植付装置60の作動を行うことができるため、エンジン10の始動時間を短くすることができる。この結果、作業能率の向上や、燃料消費の削減を図ることができる。
また、変速レバー35が後進操作されると、植付クラッチ機構82を切状態にすると共に、補助伝動モータ85が植付装置60を設定位置に移動させるため、植付装置60が土中に入り込まない姿勢で後進走行することができる。この結果、植付装置60に泥土が付着し、苗載置台51から苗を取り損ない、苗が植え付けられない箇所が発生することを防止できる。
また、植付装置60が設定位置に移動するまでは、規制ピン126が変速レバー35の後進操作を規制することにより、植付装置60が設定位置に移動する前に後進走行が開始されることを防止できる。また、変速レバー35が前進側に操作されると規制ピン126が自動的に規制位置に移動することにより、次の後進操作時に植付装置60が設定位置に移動するまで、変速レバー35を後進側に操作できないようにすることができる。これらの結果、植付装置60に泥土が付着することや、接触抵抗により植付装置60が破損することを防止できる。
また、補助駆動スイッチ130を操作すると、油圧式無段変速機16を中立にしていたり、植付クラッチ機構82を切操作していたりしても補助伝動モータ85を入切することができるので、植付作業前の苗載置台51の左右位置の調節や、メンテナンス時の植付装置60の作動を行うことができる。これにより、作業能率を向上させることができる。また、端寄せスイッチ105が、苗載置台51の機体左右方向における移動範囲の端部への到達を検知すると、補助伝動モータ85が停止するため、苗載置台51の端部の到達に合わせて補助伝動モータ85を停止操作する必要がなくなる。これにより、苗載置台51の移動中に他の作業を行うことができ、作業能率を向上させることができる。
また、苗載置台51が機体左右方向における移動範囲の端部まで移動したら、植付装置60を、苗ガイド110を通過する位置まで移動させることにより、植付装置60の作動後すぐに苗を圃場に植え付け始めることができる。これにより、作業能率を向上させることができる。また、通過検知部材115で植付装置60を検知して補助伝動モータ85の駆動制御を行うことにより、植付作業時の速度に関係なく補助伝動モータ85を停止させることができ、植付作業開始時の圃場までの距離を一定にすることができる。これにより、作業能率を向上させることができると共に、苗の植付位置が揃い易くなり、植付精度を向上させることができる。
また、通過検知部材115は、苗ガイド110の幅狭部111に設けたため、植付装置60と苗ガイド110で苗を保持することができる。これにより、植付装置60の停止中に苗が落下し、植付作業を開始した際に苗が植え付けられず、欠株が生じることを防止できる。この結果、植付精度を向上させることができると共に、手作業による苗の植付作業を不要にすることができる。
また、補助伝動モータ85の駆動力での植付装置60の作動時に、植付装置60が苗を保持している状態で苗ガイド110に到達すると、補助伝動モータ85が停止するため、植付作業開始時には、植付装置60の作動後、すぐに苗を圃場に植え付け始めることができる。これにより、作業効率を向上させることができる。一方、植付装置60が苗を保持していないときは、植付装置60が設定位置に移動したことを回転センサ94で検知したら補助伝動モータ85を停止させることにより、植付装置60が土中に入り込んだ状態で停止することを防止できる。これにより、植付装置60で苗載置台51から苗を取る際に、植付装置60に付着した泥土が、苗を取ることを妨げることを防止することができ、苗を確実に圃場に植え付けることができる。
〔変形例〕
なお、上述した苗移植機1では、補助伝動モータ85のピニオンギア86と、植付ドライブシャフト87の回転ギア88とは、噛み合った状態になっているが、ピニオンギア86と回転ギア88とは、噛み合い状態を切り替えることができるように構成されていてもよい。例えば、ピニオンギア86を、ソレノイドやシフタ等によって補助伝動モータ85の出力軸に沿った方向に移動可能にし、ピニオンギア86を移動させることにより、ピニオンギア86と回転ギア88とを噛み合わせたり、噛み合いを解除したりしてもよい。
ピニオンギア86と回転ギア88とをこのような構成にし、植付クラッチ機構82の入切を検知する植付クラッチセンサ89が、植付クラッチ機構82の入状態を検知したら、ピニオンギア86と回転ギア88との噛み合いを解除する。一方、植付クラッチセンサ89が、植付クラッチ機構82の切状態を検知したら、ピニオンギア86と回転ギア88とを噛み合わせ、補助伝動モータ85が、回転ギア88を回転可能な状態にする。このように、植付クラッチ機構82が入状態であるときには、補助伝動モータ85が回転ギア88を作動させない状態にすることにより、苗の植付作業時に補助伝動モータ85が植付ドライブシャフト87の駆動力伝達の抵抗となることを防止することができる。この結果、走行車体2の走行や苗の植付動作を安定させることができ、作業能率を向上させることができる。
また、補助伝動モータ85で発生する駆動力によって苗載置台51を機体左右方向に往復移動させる際には、苗載置台51の位置に応じて速度を異ならせてもよい。例えば、レーザセンサやストロークセンサ等を用いることにより、苗載置台51の位置を検出し、苗載置台51が移動範囲における端部付近まで移動したら、端部に近付くに従って移動速度を遅くしてもよい。これにより、苗載置台51の移動状態を把握することができ、作業性を向上させることができる。
また、補助伝動モータ85を駆動させた場合には、植付装置60と苗載置台51とが共に作動するが、これらはクラッチ等により駆動力の伝達経路を遮断可能にし、いずれか一方が作動するようにしてもよい。例えば、メンテナンス時等に補助伝動モータ85を駆動させた場合には、植付装置60は作動させず、苗載置台51のみが機体左右方向に往復移動するようにしてもよい。これにより、補助伝動モータ85の駆動時における電力消費量を低減することができ、補助伝動モータ85の耐久性を向上させることができる。
また、植付装置60は、副変速レバー38が走行速に切り替えられたら作動しないようにするのが好ましい。例えば、副変速レバー38が走行速の時には、植付クラッチ機構82を作動させるモータ(図示省略)が、植付クラッチ機構82を「切」にした状態で作動しないようにするのが好ましい。植付装置60が作動すると、苗載置台51が機体左右方向に移動するため、路上走行中に苗載置台51が機体左右方向に移動するとバランスを崩す虞があるが、副変速レバー38が走行速に切り替えられたら植付装置60が作動しないようにすることにより、路上走行中にバランスを崩すことを防ぐことができる。この結果、安全に路上走行を行うことができる。
また、走行車体2は圃場を走行するため、泥の付着を低減できる構造を備えていてもよい。図13は、実施形態に係る苗移植機の変形例であり、後輪5の側面図である。泥の付着や、付着した泥の飛散を低減するために、例えば、図13に示すように、後輪5の上方に円弧形状のフェンダ150を設け、このフェンダ150の下部にブラシ151を設け、後輪5の泥をブラシ151で落とすようにしてもよい。この場合におけるフェンダ150は、前端側に、機体左右方向に延びる回動軸152を設け、モータ155により、回動軸152を中心として回動自在に配設するのが好ましい。これにより、フェンダ150を下方に回動させて後輪5に近付けた状態では、ブラシ151が後輪5に接触することにより、後輪5に付着している泥をブラシ151で落とすことができる。また、フェンダ150を上方に回動させて後輪5から離した状態では、ブラシ151が後輪5から離間することにより、ブラシ151は後輪5の泥を落とさなくなる。
このように、回動することができるフェンダ150は、例えば、植付作業時において変速レバー35が前進側に操作されている場合には、下方に回動させてブラシ151を後輪5に接触させる。これにより、後輪5に付着した泥を順次落とすことができ、泥が後輪5に堆積しないようにすることができる。また、変速レバー35が後進側に操作されたら、フェンダ150を上方に回動させて、ブラシ151を後輪5から離間させる。これにより、ブラシ151が後輪5に食い込むことを防止でき、走行抵抗を低減できる。
また、フェンダ150は、副変速レバー38が走行速に切り替えられたら、上方に回動させて、ブラシ151を後輪5から離間させる。これにより、ブラシ151が後輪5から離間し、ブラシ151が後輪5に当たり続けないため、路上走行時に静かに走行することができる。また、ブラシ151が後輪5に当たらないため、後輪5に付着した泥を路上に落とすことを防ぐことができる。