JP6044331B2 - ロボット - Google Patents
ロボット Download PDFInfo
- Publication number
- JP6044331B2 JP6044331B2 JP2012284471A JP2012284471A JP6044331B2 JP 6044331 B2 JP6044331 B2 JP 6044331B2 JP 2012284471 A JP2012284471 A JP 2012284471A JP 2012284471 A JP2012284471 A JP 2012284471A JP 6044331 B2 JP6044331 B2 JP 6044331B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- current
- robot
- current value
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims description 54
- 239000012636 effector Substances 0.000 claims description 26
- 230000008859 change Effects 0.000 claims description 11
- 238000001514 detection method Methods 0.000 claims description 10
- 238000011088 calibration curve Methods 0.000 claims description 7
- 238000013459 approach Methods 0.000 claims description 5
- 210000000707 wrist Anatomy 0.000 description 14
- 230000003247 decreasing effect Effects 0.000 description 7
- 230000017525 heat dissipation Effects 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 230000009467 reduction Effects 0.000 description 6
- 230000007423 decrease Effects 0.000 description 4
- 230000020169 heat generation Effects 0.000 description 4
- 238000010438 heat treatment Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000013021 overheating Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 230000036962 time dependent Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images



Landscapes
- Manipulator (AREA)
Description
特許文献1に記載のエンドエフェクターは、互いに接近・離間可能な複数本のフィンガーと、各フィンガーを駆動させる駆動源となるサーボ制御装置とを備えている。そして、サーボ制御装置の作動により、互いに接近したフィンガー同士の間で、ワーク(物体)を把持する、すなわち、挟持することができる。
また、特許文献1に記載のエンドエフェクターでは、サーボ制御装置の作動時には、当該サーボ制御装置が有する半導体素子が発熱してしまう。この半導体素子の熱を放出するために、エンドエフェクターには、ヒートパイプ等の放熱機構が設けられている。
本発明の目的は、エンドエフェクターのモーターが過剰に発熱することにより生じ得るモーターの寿命の低下や当該モーター周辺への過剰な加熱を確実に防止することができるロボットを提供することにある。
(適用例1)
本適用例のロボットは、対象物を把持する把持機構と、電源から供給される供給電流によって前記把持機構を駆動させるモーターと、を含むエンドエフェクターが装着されるロボットアームと、
前記対象物の重量を検知する検知手段と、
前記供給電流を調整する電流調整手段と、
前記電流値(α)で通電した状態で前記モーターの温度が上昇した際に、その温度上昇の傾向に関する情報が記憶された記憶手段と、
前記情報に基づいて予め設定された、前記電流値(α)で通電した状態で前記モーターの温度が閾値に到達する到達タイミングと、前記検知手段の検知結果に基づいて、前記対象物が前記エンドエフェクターから離脱するときの前記供給電流の上限値とを得る制御手段と、を備え、
前記制御手段は、前記到達タイミングよりも以前に、前記電流調整手段によって前記供給電流を前記電流値(α)よりも低く、かつ、前記上限値よりも高い電流値(β)に調整して、前記電流値(β)の電流が前記モーターに供給されるよう制御することを特徴とする。
これにより、モーターの温度が閾値に達して、当該モーターが過剰に発熱することにより生じ得るモーターの寿命の低下を確実に防止することができる。
本発明に係わるロボットでは、前記制御手段は、前記モーターの温度が前記閾値未満となるように、前記電流調整手段により前記供給電流値を調整するのが好ましい。
これにより、モーターの温度が閾値に達して、当該モーターが過剰に発熱することにより生じ得るモーターの寿命の低下をより確実に防止することができる。
本適用例のロボットでは、前記制御手段は、前記到達タイミングよりも30秒以上前に、前記電流調整手段による前記電流値(β)への調整を開始するのが好ましい。
これにより、モーターの温度が閾値に達するよりも以前に、モーターの温度の経時的な上昇率の減少傾向が現れるのに十分な時間を確保することができる。
本適用例のロボットでは、前記対象物は、当該ロボットにより搬送されるものであり、
前記供給電流は、前記対象物の搬送途中で前記電流値(β)から前記電流値(α)に戻されるか、または、前記対象物の搬送完了まで前記電流値(β)に維持されるのが好ましい。
前記供給電流が前記対象物の搬送途中で前記電流値(β)から前記電流値(α)に戻される場合には、対象物の搬送途中で、当該対象物が把持機構から離脱し易い姿勢となってしまっても、対象物に対する把持力が増加され、よって、把持機構からの離脱が確実に防止される。また、前記供給電流が前記対象物の搬送完了まで前記電流値(β)に維持される場合には、モーターの放熱状態を維持することできる。
本適用例のロボットでは、前記電流調整手段は、前記電流値(β)を連続的に変化させるのが好ましい。
これにより、モーターの放熱状態を確実に維持することでき、よって、過熱によるモーターの寿命の低下をより確実に防止するができる。
本適用例のロボットでは、前記電流調整手段は、前記電流値(β)を段階的に変化させるのが好ましい。
これにより、モーターの放熱状態を確実に維持することでき、よって、過熱によるモーターの寿命の低下をより確実に防止するができる。さらに、連続的に下げる手段よりも
制御回路が簡易にできるのでコスト的に有利である。
本適用例のロボットでは、前記情報は、前記温度上昇の経時的な変化を示す検量線であるのが好ましい。
これにより、制御手段は、電流値(α)で通電した状態でモーターの温度が閾値に到達すると予想される到達タイミングを容易かつ確実に得ることができる。
本適用例のロボットでは、前記上限値は、前記対象物の重量に応じて複数あり、前記記憶手段に予め記憶されているのが好ましい。
これにより、制御手段は、対象物がエンドエフェクターの把持機構から離脱するときの電流の大きさの上限値を、対象物の重量に応じて、複数の上限値から正確かつ確実に選択して得ることができる。また、対象物の重量に応じた上限値を例えば演算により得る場合に比べて、ロボットの高速化に寄与する。
本発適用例ロボットでは、前記電流値(α)は、前記モーターに供給可能な電流の最大値であるのが好ましい。
これにより、把持機構で対象物を確実に把持して、持ち上げることができる。
(適用例10)
本適用例のロボットでは、前記閾値は、前記モーターが故障を来たし得る温度であるのが好ましい。
これにより、モーターの温度が閾値に達して、当該モーターが過剰に発熱することにより生じ得るモーターの寿命の低下を確実に防止することができる。また、モーターの周辺への過剰な加熱も確実に防止することができ、よって、例えば作業者が把持機構や対象物に触れても、火傷を負うのを確実に防止することができ、安全である。
本適用例のロボットでは、前記検知手段は、前記ロボットアームの先端部に設置され、前記対象物を前記エンドエフェクターで把持して持ち上げた状態で、前記ロボットアームに加わる力を検出する力覚センサーであるのが好ましい。
これにより、エンドエフェクターを介してロボットアームの先端部に加わる力やモーメントを検知することができ、よって、エンドエフェクターに把持された対象物の重量を正確かつ確実に検知することができる。
本適用例のロボットでは、前記ロボットアームは、複数本のアームが互いに回動可能に連結されたアーム連結体で構成されているのが好ましい。
これにより、動作時の自由度が増し、対象物に対する姿勢を好適に変更することができる。
本適用例のロボットでは、前記把持機構は、前記対象物を挟持する一対の挟持片を有し、
前記モーターは、前記一対の挟持片を互いに接近・離間可能に移動させるものであるのが好ましい。
これにより、対象物を確実に把持することができ、また、その反対に、把持した対象物を確実に放すことができる。
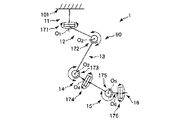
<第1実施形態>
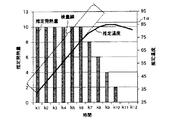
図1は、本発明に係わるロボット(第1実施形態)の作動状態を示す斜視図、図2は、図1に示すロボットの概略図、図3は、図1に示すロボットの主要部のブロック図、図4は、図1に示すロボットにおける制御動作を示すフローチャート、図5は、図1に示すロボットに装着されたエンドエフェクターのモーターの推定温度の経時的な変化を示す折れ線グラフと、同エンドエフェクターのモーターの単位時間当たりの推定発熱量の経時的な変化を示す棒グラフである。なお、以下では、説明の都合上、図1、図2中の上側を「上」または「上方」、下側を「下」または「下方」と言う。また、図1、図2中の基台側を「基端」、その反対側を「先端」と言う。
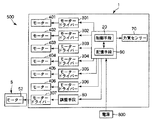
図3に示すように、ロボット1は、電流(電力)を供給する電源800と電気的に接続されており、ロボットハンド5を装着した状態で、ワーク(対象物)700を搬送する搬送工程で用いることができる。なお、ワーク700としては、特に限定されず、例えば腕時計のような精密機器等が挙げられる。また、電源800は、工業用の電源であり、例えば、200Vの交流電圧を印加することができる。
ロボットアーム60は、基台11と、4本のアーム(リンク)12、13、14、15と、リスト(リンク)16とを備え、これらが順に連結され、互いに回動可能な多関節(6軸)アーム連結体である。これにより、動作時の自由度が増し、ワーク700に対する姿勢を好適に変更することができる。
図2に示すように、アーム12〜15、リスト16は、それぞれ、基台11に対し独立して変位可能に支持されている。
基台11とアーム12とは、関節(ジョイント)171を介して連結されている。そして、アーム12は、基台11に対し、鉛直方向と平行な回動軸O1回りに回動可能となっている。この回動軸O1回りの回動は、モーター401の駆動によりなされる。なお、モーター401の駆動は、モーター401とケーブル(図示せず)を介して電気的に接続されたモータードライバー301により制御される(図3参照)。
図1に示すように、基台11は、ロボット1(ロボットアーム60)が多関節ロボットの場合、当該多関節ロボットの最も上方に位置し、天井101に固定される部分である。この固定方法としては、特に限定されず、例えば、複数本のボルトによる固定方法を用いている。
アーム13は、アーム12の先端部に連結されている。このアーム13では、駆動機構3bがモーター403を有しており、アーム本体2b内に収納されている。
アーム15は、アーム14の先端部に、その中心軸方向と平行に連結されている。このアーム15では、駆動機構3dがモーター405、406を有しており、アーム本体2d内に収納されている。
なお、駆動機構3a〜3dは、それぞれ、モーターの他に、例えば、プーリーやタイミングベルトを有している。
力覚センサー70は、ロボットハンド5を介してリスト16に加わる力やモーメントを検知することができる。これにより、ロボットハンド5に把持されたワーク700を、その直近で、当該ワーク700の重量を正確かつ確実に検知することができる。
この力覚センサー70としては、特に限定されず、各種のものを用いることができるが、その1例としては、例えば、互いに直交する3軸の各軸方向の力および各軸回りのモーメントを検出する6軸力センサー等が挙げられる。この力覚センサー70は、例えば、ロボットハンド5によりワーク700を把持して持ち上げた状態で、そのロボットハンド5からリスト16に加わる力やモーメントを検出する。そして、力とモーメントとを含めたものからワーク700の重量を算出することができる。
電流調整手段80は、パルス幅変調(PWM)回路(図示せず)を有している。この回路で、パルス幅変調(PWM)を行なうことにより、電源800から供給された供給電流の大きさを容易に調整することができる。
これにより、制御手段20は、モータードライバー301〜306を介して、モーター401〜406をそれぞれ独立して作動させることができる。その際、制御手段20は、例えば、モーター401〜406への供給電流を所望の値になるようフィードバックしたり、モーター401〜406(関節171〜176)の角速度を所望の値になるようフィードバックする。この制御プログラムは、記憶手段90に予め記憶されている。
図1に示すように、ロボットハンド5は、ロボット1のリスト16に装着された状態で使用される。以下、この状態を「装着状態」と言う。このロボットハンド5は、ワーク700を把持する把持機構51と、把持機構51を駆動させるモーター52とを有している。
ベース511は、ロボット1のリスト16に装着される部分である。
一対の挟持片512は、互いに対向配置された板部材であり、ベース511を介して、互いに接近・離間可能に支持されている。そして、挟持片512同士が接近することにより、これらの間でワーク700を挟持することができる。これにより、ワーク700が把持される。また、挟持片512同士が離間することにより、把持されていたワーク700を放すことができる。
なお、モータードライバー307は、電流調整手段80と電気的に接続されている。これにより、電流調整手段80でパルス幅変調(調整)された供給電流がモータードライバー307を介して、モーター52に供給される。
前述したように、モーター52は、供給される供給電流の大きさが、モーター52に供給可能な電流の最大値である電流値(α)で通電した状態では、温度が上昇して、発熱する。なお、モーター52には、電流値(α)が供給されているため、把持機構51でワーク700を確実に把持して、持ち上げることができる(図1(a)、(b)参照)。
ロボットシステム500(ロボット1)で前記「問題」が生じるのが防止されるような作動状態は、図4に示すフローチャートに基づいた制御手段20の制御プログラムで実行される。この作動状態について、図1、図5を参照しつつ説明する。
次に、図1(b)に示すように、挟持片512同士を接近させて、ワーク700を挟持するとともに、当該ワーク700を持ち上げる(ステップS2)。このときのロボットハンド5のモーター52には、電流値(α)の電流が供給されている。これにより、ワーク700が確実に挟持され(把持され)、よって、挟持片512から離脱するのが確実に防止される。
次に、ワーク700に対する搬送を開始して(図1(c)参照)、その搬送が終了したか否かを判断する(ステップS4)。ワーク700に対する搬送が終了したと判断した場合には、ロボットハンド5の把持機構51で把持したワーク700を第2テーブル902上に載置した状態で、当該把持機構51の挟持片512同士を離間させる(ステップS5)。これにより、ワーク700に対する挟持力が解除され、よって、当該ワーク700が把持機構51から開放される(図1(d)参照)。
また、ステップS7の判断の結果、搬送終了時間内に到達タイミングが入っていないと判断した場合には、ステップS4に戻り、以後、それより下位のステップを順次実行する。
また、図5に示すように、単位時間当たりの発熱量は、時間k1から時間k6までは、一定であるが、電流値(β)に調整を開始した時期である時間k6以降は、時間k1から時間k6までのときよりも減少している。
また、ステップS9を実行した後は、ステップS4に戻り、以後、それより下位のステップを順次実行する。
電流調整手段80による電流値(β)への調整の開始時期(図5中では時間k6)は、到達タイミング(図5中では時間k8)よりも以前であれば特に限定されないが、例えば、到達タイミングよりも30秒以上前であるのが好ましい。これにより、モーター52の温度が閾値に達するよりも以前に、前記上昇率の減少傾向が現れるのに十分な時間を確保することができる。
また、供給電流の大きさは、ワーク700の搬送途中で電流値(β)から電流値(α)に戻されてもよい。これにより、搬送途中で、ワーク700が把持機構51から離脱し易い姿勢となってしまっても、ワーク700に対する把持力が増加され、よって、把持機構51からの離脱が確実に防止される。
図6は、本発明に係わるロボット(第2実施形態)に装着されたエンドエフェクターのモーターの推定温度の経時的な変化を示す折れ線グラフと、同エンドエフェクターのモーターの単位時間当たりの推定発熱量の経時的な変化を示す棒グラフである。
以下、この図を参照して本発明に係わるロボットの第2実施形態について説明するが、前述した実施形態との相違点を中心に説明し、同様の事項はその説明を省略する。
本実施形態では、電流値(β)は、電流調整手段80により段階的に減少している(図6参照)。これにより、前記上昇率も段階的に減少することとなり、モーター52の放熱状態を維持することでき、よって、モーター52の寿命の低下や、モーター52の周辺への過剰な加熱をより確実に防止するができる。
また、本発明に係わるロボットは、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
また、エンドエフェクターが装着されるロボットアームは、前記各実施形態では複数本のアームを備えるものであったが、これに限定されず、例えば、1本のアームを備えるものであってもよい。
また、エンドエフェクターにおける挟持片の設置数は、前記各実施形態では2枚であるが、これに限定されず、例えば、3枚以上であってもよい。
Claims (13)
- 対象物を把持する把持機構と、電源から供給される供給電流によって前記把持機構を駆動させるモーターと、を含むエンドエフェクターが装着されるロボットアームと、
前記対象物の重量を検知する検知手段と、
前記供給電流を調整する電流調整手段と、
前記電流値(α)で通電した状態で前記モーターの温度が上昇した際に、その温度上昇の傾向に関する情報が記憶された記憶手段と、
前記情報に基づいて予め設定された、前記電流値(α)で通電した状態で前記モーターの温度が閾値に到達する到達タイミングと、前記検知手段の検知結果に基づいて、前記対象物が前記エンドエフェクターから離脱するときの前記供給電流の上限値とを得る制御手段と、を備え、
前記制御手段は、前記到達タイミングよりも以前に、前記電流調整手段によって前記供給電流を前記電流値(α)よりも低く、かつ、前記上限値よりも高い電流値(β)に調整して、前記電流値(β)の電流が前記モーターに供給されるよう制御することを特徴とするロボット。 - 前記制御手段は、前記モーターの温度が前記閾値未満となるように、前記電流調整手段により前記供給電流を調整する請求項1に記載のロボット。
- 前記制御手段は、前記到達タイミングよりも30秒以上前に、前記電流調整手段による前記電流値(β)への調整を開始する請求項1または2に記載のロボット。
- 前記対象物は、当該ロボットにより搬送されるものであり、
前記供給電流は、前記対象物の搬送途中で前記電流値(β)から前記電流値(α)に戻されるか、または、前記対象物の搬送完了まで前記電流値(β)に維持される請求項1ないし3のいずれか1項に記載のロボット。 - 前記電流調整手段は、前記電流値(β)を連続的に変化させる請求項1ないし4のいずれか1項に記載のロボット。
- 前記電流調整手段は、前記電流値(β)を段階的に変化させる請求項1ないし4のいずれか1項に記載のロボット。
- 前記情報は、前記温度上昇の経時的な変化を示す検量線である請求項1ないし6のいずれか1項に記載のロボット。
- 前記上限値は、前記対象物の重量に応じて複数あり、前記記憶手段に予め記憶されている請求項1ないし7のいずれか1項に記載のロボット。
- 前記電流値(α)は、前記モーターに供給可能な電流の最大値である請求項1ないし8のいずれか1項に記載のロボット。
- 前記閾値は、前記モーターが故障を来たし得る温度である請求項1ないし9のいずれか1項に記載のロボット。
- 前記検知手段は、前記ロボットアームの先端部に設置され、前記対象物を前記エンドエフェクターで把持して持ち上げた状態で、前記ロボットアームに加わる力を検出する力覚センサーである請求項1ないし10のいずれか1項に記載のロボット。
- 前記ロボットアームは、複数本のアームが互いに回動可能に連結されたアーム連結体で構成されている請求項1ないし11のいずれか1項に記載のロボット。
- 前記把持機構は、前記対象物を挟持する一対の挟持片を有し、
前記モーターは、前記一対の挟持片を互いに接近・離間可能に移動させるものである請求項1ないし12のいずれか1項に記載のロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012284471A JP6044331B2 (ja) | 2012-12-27 | 2012-12-27 | ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012284471A JP6044331B2 (ja) | 2012-12-27 | 2012-12-27 | ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014124738A JP2014124738A (ja) | 2014-07-07 |
| JP6044331B2 true JP6044331B2 (ja) | 2016-12-14 |
Family
ID=51404683
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012284471A Expired - Fee Related JP6044331B2 (ja) | 2012-12-27 | 2012-12-27 | ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6044331B2 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63126010A (ja) * | 1986-11-15 | 1988-05-30 | Kobe Steel Ltd | テイ−チング・プレイバツク式ロボツトの作業限界予知方法 |
| JPH0787787A (ja) * | 1993-09-14 | 1995-03-31 | Fanuc Ltd | 産業用ロボットのデューティ表示方法 |
| JP4471531B2 (ja) * | 2001-05-16 | 2010-06-02 | シチズンホールディングス株式会社 | 素材把持装置及び自動旋盤 |
| JP2006181648A (ja) * | 2004-12-24 | 2006-07-13 | Toyota Motor Corp | ロボットアーム駆動装置 |
| JP5586991B2 (ja) * | 2010-03-09 | 2014-09-10 | キヤノン株式会社 | 把持装置の制御方法及び把持システム |
| JP5834491B2 (ja) * | 2011-05-24 | 2015-12-24 | セイコーエプソン株式会社 | ロボットハンド、およびロボット |
| US9815193B2 (en) * | 2011-06-27 | 2017-11-14 | Delaware Capital Formation, Inc. | Electric motor based holding control systems and methods |
-
2012
- 2012-12-27 JP JP2012284471A patent/JP6044331B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014124738A (ja) | 2014-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5846479B2 (ja) | ロボットとその制御方法 | |
| US10272568B2 (en) | Robot apparatus, robot controlling method, program, recording medium, and assembly manufacturing method | |
| US20160039093A1 (en) | Low-impedance articulated device and method for assisting a manual assembly task | |
| KR101947825B1 (ko) | 로봇, 및 로봇을 작동시키기 위한 방법 | |
| US20150120058A1 (en) | Robot, robot system, and robot control apparatus | |
| US10195744B2 (en) | Control device, robot, and robot system | |
| JP2013136141A (ja) | 把持装置、ロボット装置及び把持装置の制御方法 | |
| KR20130136477A (ko) | 로봇 시스템의 퍼리퍼럴 구성요소를 제어하기 위한 방법 및 장치 | |
| JP2014522747A5 (ja) | ||
| JP2009255191A (ja) | ロボットマニピュレータ | |
| CN104044141A (zh) | 机器人系统及机器人系统的控制方法 | |
| JP2016117141A (ja) | 人との接触力を検出してロボットを停止させるロボット制御装置 | |
| JP2010069587A5 (ja) | ロボットシステムおよびロボットの制御方法 | |
| CN109955279B (zh) | 机器人手、其控制方法、物品的组装方法及存储介质 | |
| JP2015171747A (ja) | 外部環境との接触を検知するロボット制御装置 | |
| JP2014180719A (ja) | ロボット装置 | |
| JP2014188645A (ja) | ロボット群システム | |
| CN113290542B (zh) | 机器人装置及控制方法 | |
| JP2020004916A (ja) | 基板搬送装置及びその運転方法 | |
| WO2021141039A1 (ja) | ワーク搬送システム | |
| JP2017056525A (ja) | ロボット装置、ロボット制御方法、プログラム、記録媒体及び組立部品の製造方法 | |
| JP6089695B2 (ja) | ロボット | |
| WO2018139574A1 (ja) | 搬送システム及びその運転方法 | |
| JP2007098501A (ja) | ロボットシステム | |
| JP6044331B2 (ja) | ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150109 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151221 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160610 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160624 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161013 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161018 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161031 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6044331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |