JP6013363B2 - ビューの画像の少なくとも1つの特徴に注釈付けするためのコンピュータ化された方法及びデバイス - Google Patents
ビューの画像の少なくとも1つの特徴に注釈付けするためのコンピュータ化された方法及びデバイス Download PDFInfo
- Publication number
- JP6013363B2 JP6013363B2 JP2013545134A JP2013545134A JP6013363B2 JP 6013363 B2 JP6013363 B2 JP 6013363B2 JP 2013545134 A JP2013545134 A JP 2013545134A JP 2013545134 A JP2013545134 A JP 2013545134A JP 6013363 B2 JP6013363 B2 JP 6013363B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- feature identification
- portable device
- feature
- features
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 132
- 238000004891 communication Methods 0.000 claims description 9
- 238000010191 image analysis Methods 0.000 claims description 2
- 238000010422 painting Methods 0.000 description 10
- 230000001413 cellular effect Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 230000003190 augmentative effect Effects 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 3
- 241000404883 Pisa Species 0.000 description 2
- 241000950638 Symphysodon discus Species 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- HOQADATXFBOEGG-UHFFFAOYSA-N isofenphos Chemical compound CCOP(=S)(NC(C)C)OC1=CC=CC=C1C(=O)OC(C)C HOQADATXFBOEGG-UHFFFAOYSA-N 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- 239000003086 colorant Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000001404 mediated effect Effects 0.000 description 1
- NRNCYVBFPDDJNE-UHFFFAOYSA-N pemoline Chemical compound O1C(N)=NC(=O)C1C1=CC=CC=C1 NRNCYVBFPDDJNE-UHFFFAOYSA-N 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/60—Editing figures and text; Combining figures or text
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/40—Information retrieval; Database structures therefor; File system structures therefor of multimedia data, e.g. slideshows comprising image and additional audio data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
- G06F16/5838—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content using colour
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
- G06F16/5854—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content using shape and object relationship
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
- G06F16/5862—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content using texture
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/70—Information retrieval; Database structures therefor; File system structures therefor of video data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F40/00—Handling natural language data
- G06F40/10—Text processing
- G06F40/103—Formatting, i.e. changing of presentation of documents
- G06F40/117—Tagging; Marking up; Designating a block; Setting of attributes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F40/00—Handling natural language data
- G06F40/10—Text processing
- G06F40/166—Editing, e.g. inserting or deleting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F40/00—Handling natural language data
- G06F40/10—Text processing
- G06F40/166—Editing, e.g. inserting or deleting
- G06F40/169—Annotation, e.g. comment data or footnotes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/20—Scenes; Scene-specific elements in augmented reality scenes
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Databases & Information Systems (AREA)
- Data Mining & Analysis (AREA)
- Library & Information Science (AREA)
- Multimedia (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Computational Linguistics (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Artificial Intelligence (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Studio Devices (AREA)
- Processing Or Creating Images (AREA)
- Information Retrieval, Db Structures And Fs Structures Therefor (AREA)
- User Interface Of Digital Computer (AREA)
Description
ビューの画像の少なくとも1つの特徴に注釈付けするためのコンピュータ化された方法において、
ポータブル・デバイスの画像センサによって前記画像を得るステップと、
前記ポータブル・デバイスのパラメータから少なくとも1つの条件を取り出すステップと、
前記少なくとも1つの条件に基づいて、利用可能な複数の特徴識別方法から1つの特徴識別方法を自動的に選択するステップと、
前記画像の複数の特徴を識別するために前記特徴識別方法を適用するステップと、
当該識別された複数の特徴のうちのどの特徴が注釈付けされるべきかを決定するステップと、
当該識別された複数の特徴のうちの少なくとも幾つかの特徴に注釈付けして、重ねられた注釈を有する注釈付き画像を生成するステップとから成り、
前記複数の特徴識別方法は、
前記画像と1つ又は複数の2Dモデルとの間の合致に基づく第1の特徴識別方法と、
前記画像と1つ又は複数の3Dモデルとの間の合致に基づく第2の特徴識別方法とのうちの少なくとも1つの方法から成るか、又はこれらの方法の任意に組み合わせたものから成る当該方法によって解決される。
さらに、本発明は、請求項11に記載のビューの画像の少なくとも1つの特徴に注釈付けするためのシステムと、請求項13に記載のコンピュータ読み取り可能な記録媒体とによって解決される。
・1つ又は複数の位置特定センサ
・1つ又は複数のネットワークベースのセンサ
・1つ又は複数のポータブル・デバイス・パラメータ
・1つ又は複数のリモート・サーバ
・ポータブル・デバイスの画像センサによって前記画像を得るステップと、
・少なくとも1つの条件を取り出すステップと、
・前記少なくとも1つの条件に基づいて、リモート・サーバ上で複数の特徴識別データ及び/又は注釈から特徴識別データのセット及び/又は注釈候補のセットを自動的に選択するステップと、
・前記セット(1つ又は複数)を前記ポータブル・デバイスにダウンロードするステップと、
・前記画像の特徴が特徴識別データと合致するかどうか検証するステップと、
・対応が見つかった場合に、識別された複数の特徴のうちの少なくとも幾つかの特徴に注釈付けするステップと、
・対応が見つからない場合に、対応が見つかるまで特徴識別データ及び/もしくは注釈候補のセットを変更及び/もしくは拡張し、かつ/又は、ポータブル・デバイスのユーザに通知してユーザにいくらかの特徴識別データ及び/もしくは注釈候補の挿入を求めるステップとを含む。
・位置センサ(例えばカメラの画像センサにリンクされたGPSセンサ)から、又はGSMやUMTSネットワークなどのセルラー・ネットワークから取り出された、カメラの地理的位置
・ユーザ設定
・注釈付けすべき特徴(1つ又は複数)上の、データグラム、及び/又はバーコード、及び/又はRFID、及び/又は他の任意の認識可能な特徴、例えばロゴ、OCR検出
・現在のデータ及び/又は時間
・サーバとポータブル・デバイスとの間の通信リンクの品質
・ポータブル・デバイスの計算力
・その他
(a)前記画像を得るための画像センサを備えるポータブル・デバイスと、
(b)少なくとも1つの条件を取り出す手段と、
(c)前記条件に基づいて複数の特徴識別方法からある特徴識別方法を自動的に選択する手段と、
(d)前記少なくとも1つの特徴を識別するために前記特徴識別方法を適用する手段と、
(g)識別された幾つかの特徴に注釈付けする手段とを備える。
(e)識別されたどの特徴に注釈付けしなければならないかを決定する手段と、
(f)識別された特徴について、注釈の内容及びどのように注釈を書き込むかを決定する手段とを備えてよい。
・カメラの集束距離。
・利用可能なら、カメラの場面モード。例えば「風景」。
・カメラ・フラッシュの使用又は不使用。
・環境(山/屋外)。
・位置センサ(例えばカメラの画像センサにリンクされたGPSセンサ)から、又はGSMやUMTSネットワークなどのセルラー・ネットワークから取り出された、カメラの地理的位置。例えばスイスのツェルマット。セルラー・ネットワークから地理的位置を取り出すのは、三辺測量及び/又は三角測量によって実施することができる。
・画像分析に基づく、かつ場合によっては、モデルを含むリモート・サーバを用いた画像マッチングに基づく、画像のアプリオリな分類。
・注釈付けデバイス中に位置するか又は注釈付けデバイスに関連する1つ又は複数のセンサ(例えば温度計又はマイクロホン)によって提供される情報。例えば、注釈付けデバイスに接続されたマイクロホンによって取り込まれた周囲の雑音が、屋内/屋外環境の情報を提供し、次いで条件を生成することができる。
− その他。
・カメラの集束距離。
・利用可能なら、カメラの場面モード。例えば「オート」。
・カメラ・フラッシュの使用又は不使用。
・位置センサ(例えばカメラの画像センサにリンクされたGPSセンサ)から、又は、カメラの画像センサにリンクされたネットワークベースのセンサ(ネットワークは例えばGSMやUMTSネットワークなどである)から取り出された、環境(屋外)及び/又は場所の地理的位置。例えばイタリアのピサ。
・モデルを含むリモート・サーバを用いた画像マッチングからの結果。
・その他。
・位置特定の信頼性及び精度、ならびに/又は
・特徴の識別の信頼性
・画像認識プロセスの信頼性
・その他
・位置センサ(例えばカメラの画像センサにリンクされたGPSセンサ)から、もしくはGSMやUMTSネットワークなどのセルラー・ネットワークから取り出された、カメラの地理的位置。例えば、パリで取り込まれた画像に注釈付けする要求は、マッターホルンに対応する特徴ではなくエッフェル塔に対応する特徴識別データ及び注釈を取り出すことになる。
・ユーザ設定。ならびに/又は、
・注釈付けすべき特徴(1つ又は複数)上の、データグラム、及び/もしくはバーコード、及び/もしくはRFID、及び/もしくは他の任意の認識可能な特徴、例えばロゴ、OCR検出。ならびに/又は、
・現在のデータ及び/もしくは時間。ならびに/又は、
・サーバとポータブル・デバイスとの間の通信リンクの品質、ならびに/又は、
・ポータブル・デバイスの計算力。ならびに/又は、
・その他。
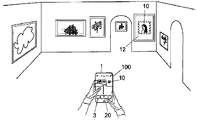
3 触覚手段
10 マッターホルン、絵画
12 別の絵画
20 矢印
100 ポータブル・デバイス
Claims (13)
- ビューの画像の少なくとも1つの特徴に注釈付けするためのコンピュータ化された方法において、
ポータブル・デバイスの画像センサによって前記画像を得るステップと、
前記ポータブル・デバイスのパラメータから少なくとも1つの条件を取り出すステップと、
前記少なくとも1つの条件に基づいて、利用可能な複数の特徴識別方法から1つの特徴識別方法を自動的に選択するステップと、
前記画像の複数の特徴を識別するために前記特徴識別方法を適用するステップと、
当該識別された複数の特徴のうちのどの特徴が注釈付けされるべきかを決定するステップと、
当該識別された複数の特徴のうちの少なくとも幾つかの特徴に注釈付けして、重ねられた注釈を有する注釈付き画像を生成するステップとから成り、
前記複数の特徴識別方法は、
前記画像と1つ又は複数の2Dモデルとの間の合致に基づく第1の特徴識別方法と、
前記画像と1つ又は複数の3Dモデルとの間の合致に基づく第2の特徴識別方法とから成る当該方法。 - 前記条件は、前記ポータブル・デバイスの集束距離に依存し、
前記集束距離が、既定のしきい値より短いときは、前記第1の特徴識別方法が選択され、
前記集束距離が、前記既定のしきい値より長いときは、前記第2の特徴識別方法が選択される請求項1に記載の方法。 - 1つの特徴識別方法の当該選択は、前記画像の画像分析の結果に依存する請求項1に記載の方法。
- 前記条件は、前記ポータブル・デバイスの地理的位置に依存する請求項1に記載の方法。
- 前記条件は、前記画像センサのレンズの少なくとも1つの設定パラメータ、及び/又は前記ポータブル・デバイスの少なくとも1つのパラメータを有する請求項1に記載の方法。
- 前記選択された特徴識別方法をユーザによって妥当性検査するステップをさらに有する請求項1に記載の方法。
- 前記ユーザは、前記自動的に選択された特徴識別方法を、別の特徴識別方法に手動で置き換える請求項6に記載の方法。
- ・前記少なくとも1つの条件に基づいて、特徴識別データ及び一セットの対応する注釈候補を、リモート・サーバ上で自動的に選択するステップと、
・前記特徴識別データ及び前記一セットの注釈候補を、前記ポータブル・デバイスにダウンロードするステップと、
・適用するための特徴識別方法を選択するステップと、
・前記選択され且つダウンロードされた特徴識別データと前記画像の識別された特徴との間に、少なくとも1つの一致点が存在することを検証するステップと、
・一致点が発見されたときに、前記識別された複数の特徴のうちの少なくとも幾つかの特徴に注釈付けするステップと、
・一致点が発見されなかったときに、一致点が発見されるまで、前記一セットの注釈候補を変更及び/又は拡張するステップとから成る請求項1に記載の方法。 - ・前記少なくとも1つの条件、及び/又は、リモート・サーバと前記ポータブル・デバイスとの間の通信リンクの品質、及び/又は、前記ポータブル・デバイスの計算力に基づいて、一セットの特徴識別データをリモート・サーバ上で自動的に選択するステップと、
・前記選択された特徴識別データを、前記ポータブル・デバイスにダウンロードするステップと、
・前記選択され且つダウンロードされた特徴識別データを使用して、前記識別された複数の特徴のうちの少なくとも幾つかの特徴に注釈付けするステップとから成る請求項1に記載の方法。 - 複数の特徴識別データ及び対応する注釈が、前記ポータブル・デバイスに追加され、
当該追加された特徴識別データ及び対応する注釈が、リモート・サーバに送られ、
画像内での識別時に、対応する特徴に注釈付けするために、その他のポータブル・デバイスで利用可能になる請求項1に記載の方法。 - ビューの画像の少なくとも1つの特徴に注釈付けするための、請求項1〜10のいずれか1項に記載の方法で使用されるシステムにおいて、
当該システムは:
前記画像を得るための画像センサを有するポータブル・デバイスと、
前記ポータブル・デバイスのパラメータから少なくとも1つの条件を取り出すための手段と、
前記少なくとも1つの条件に基づいて、利用可能な複数の特徴識別方法から1つの特徴識別方法を自動的に選択するための手段と、
前記画像の複数の特徴を識別するために前記特徴識別方法を適用するための手段と、
当該識別された複数の特徴のうちのどの特徴が注釈付けされるべきかを決定する手段と、
前記識別された複数の特徴のうちの幾つかの特徴に注釈付けして、重ねられた注釈を有する注釈付き画像を生成するための手段とから成るシステム。 - 前記ポータブル・デバイスは、1つ以上の位置特定センサと、当該位置特定センサの出力に基づいて注釈方法を選択するための手段とを有する請求項11に記載のシステム。
- ポータブル・デバイスの画像センサによって得られたビューの画像から少なくとも1つの条件を取り出すこと、
前記少なくとも1つの条件に基づいて、利用可能な複数の特徴識別方法から1つの特徴識別方法を自動的に選択すること、
ビューの画像の少なくとも1つの特徴に注釈付けするために前記選択された特徴識別方法を適用すること、及び
前記識別された複数の特徴のうちの幾つかの特徴に注釈付けすることを、プログラマブルプロセッサに実行させるための命令によって符号化されたコンピュータ読み取り可能な、請求項1〜10のいずれか1項に記載の方法又は請求項11若しくは12に記載のシステムで使用される記録媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH2131/10 | 2010-12-21 | ||
| CH21312010 | 2010-12-21 | ||
| PCT/EP2011/070382 WO2012084362A1 (en) | 2010-12-21 | 2011-11-17 | Computerized method and device for annotating at least one feature of an image of a view |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014501984A JP2014501984A (ja) | 2014-01-23 |
| JP6013363B2 true JP6013363B2 (ja) | 2016-10-25 |
Family
ID=43827859
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013545134A Active JP6013363B2 (ja) | 2010-12-21 | 2011-11-17 | ビューの画像の少なくとも1つの特徴に注釈付けするためのコンピュータ化された方法及びデバイス |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9959644B2 (ja) |
| EP (2) | EP3678035A1 (ja) |
| JP (1) | JP6013363B2 (ja) |
| KR (1) | KR101867558B1 (ja) |
| CN (1) | CN103415849B (ja) |
| WO (1) | WO2012084362A1 (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9132352B1 (en) | 2010-06-24 | 2015-09-15 | Gregory S. Rabin | Interactive system and method for rendering an object |
| JP5668587B2 (ja) * | 2011-04-19 | 2015-02-12 | ソニー株式会社 | 画像処理装置、画像処理方法及びプログラム |
| EP2802958B1 (en) * | 2012-01-11 | 2019-11-13 | Ultra-D Coöperatief U.A. | Mobile display device |
| US9829996B2 (en) * | 2012-06-25 | 2017-11-28 | Zspace, Inc. | Operations in a three dimensional display system |
| US9654968B2 (en) | 2012-07-17 | 2017-05-16 | Texas Instruments Incorporated | Certified-based control unit-key fob pairing |
| WO2014017392A1 (ja) | 2012-07-24 | 2014-01-30 | 日本電気株式会社 | 情報処理装置、そのデータ処理方法、およびプログラム |
| KR20150082195A (ko) | 2012-10-05 | 2015-07-15 | 비디노티 에스아 | 어노테이션 방법 및 기기 |
| US9237263B2 (en) | 2012-10-05 | 2016-01-12 | Vidinoti Sa | Annotation method and apparatus |
| JP6064510B2 (ja) * | 2012-10-19 | 2017-01-25 | トヨタ自動車株式会社 | 情報提供装置および情報提供方法 |
| EP2746726A1 (en) * | 2012-12-21 | 2014-06-25 | GN Store Nord A/S | System and method for tagging an audio signal to an object or a location; system and method of playing back a tagged audio signal |
| US8854361B1 (en) * | 2013-03-13 | 2014-10-07 | Cambridgesoft Corporation | Visually augmenting a graphical rendering of a chemical structure representation or biological sequence representation with multi-dimensional information |
| US10853407B2 (en) * | 2013-09-05 | 2020-12-01 | Ebay, Inc. | Correlating image annotations with foreground features |
| US10290036B1 (en) * | 2013-12-04 | 2019-05-14 | Amazon Technologies, Inc. | Smart categorization of artwork |
| JP6447992B2 (ja) * | 2014-10-23 | 2019-01-09 | キヤノン株式会社 | 画像管理装置及びその制御方法 |
| US20170243403A1 (en) * | 2014-11-11 | 2017-08-24 | Bent Image Lab, Llc | Real-time shared augmented reality experience |
| WO2016077506A1 (en) | 2014-11-11 | 2016-05-19 | Bent Image Lab, Llc | Accurate positioning of augmented reality content |
| US20160133230A1 (en) * | 2014-11-11 | 2016-05-12 | Bent Image Lab, Llc | Real-time shared augmented reality experience |
| US9959623B2 (en) | 2015-03-09 | 2018-05-01 | Here Global B.V. | Display of an annotation representation |
| CN104850229B (zh) * | 2015-05-18 | 2019-03-22 | 小米科技有限责任公司 | 识别物体的方法及装置 |
| US10600249B2 (en) | 2015-10-16 | 2020-03-24 | Youar Inc. | Augmented reality platform |
| US9876869B2 (en) * | 2015-10-28 | 2018-01-23 | Sk Planet Co., Ltd. | Method and apparatus for providing beacon service |
| KR102528596B1 (ko) * | 2015-10-28 | 2023-05-04 | 에스케이플래닛 주식회사 | 비콘 서비스 제공 방법 및 장치 |
| CN106971129A (zh) * | 2016-01-13 | 2017-07-21 | 深圳超多维光电子有限公司 | 一种3d图像的应用方法和装置 |
| WO2017165705A1 (en) | 2016-03-23 | 2017-09-28 | Bent Image Lab, Llc | Augmented reality for the internet of things |
| US9715508B1 (en) * | 2016-03-28 | 2017-07-25 | Cogniac, Corp. | Dynamic adaptation of feature identification and annotation |
| CN105808782B (zh) * | 2016-03-31 | 2019-10-29 | 广东小天才科技有限公司 | 一种图片标签的添加方法及装置 |
| US9842095B2 (en) * | 2016-05-10 | 2017-12-12 | Adobe Systems Incorporated | Cross-device document transactions |
| US10019824B2 (en) * | 2016-08-16 | 2018-07-10 | Lawrence Livermore National Security, Llc | Annotation of images based on a 3D model of objects |
| EP3285216A1 (en) * | 2016-08-19 | 2018-02-21 | Nokia Technologies Oy | Association of comments to points of interest in virtual reality |
| US10623453B2 (en) * | 2017-07-25 | 2020-04-14 | Unity IPR ApS | System and method for device synchronization in augmented reality |
| US10776619B2 (en) | 2018-09-27 | 2020-09-15 | The Toronto-Dominion Bank | Systems and methods for augmenting a displayed document |
| US11073972B2 (en) | 2018-11-02 | 2021-07-27 | Motorola Solutions, Inc. | Visual summarization methods for time-stamped images |
| CN110119383A (zh) * | 2019-04-15 | 2019-08-13 | 维沃移动通信有限公司 | 一种文件管理方法及终端设备 |
| US11093691B1 (en) * | 2020-02-14 | 2021-08-17 | Capital One Services, Llc | System and method for establishing an interactive communication session |
| WO2022031835A1 (en) | 2020-08-05 | 2022-02-10 | Avesha, Inc. | Networked system for real-time computer-aided augmentation of live input video stream |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69635101T2 (de) * | 1995-11-01 | 2006-06-01 | Canon K.K. | Verfahren zur Extraktion von Gegenständen und dieses Verfahren verwendendes Bildaufnahmegerät |
| US6222583B1 (en) * | 1997-03-27 | 2001-04-24 | Nippon Telegraph And Telephone Corporation | Device and system for labeling sight images |
| JP3225882B2 (ja) | 1997-03-27 | 2001-11-05 | 日本電信電話株式会社 | 景観ラベリングシステム |
| US8432414B2 (en) | 1997-09-05 | 2013-04-30 | Ecole Polytechnique Federale De Lausanne | Automated annotation of a view |
| JP2001216309A (ja) * | 2000-01-31 | 2001-08-10 | Keio Gijuku | 対象物特定装置及びカメラ |
| US20020089519A1 (en) * | 2001-01-05 | 2002-07-11 | Vm Labs, Inc. | Systems and methods for creating an annotated media presentation |
| US6915011B2 (en) * | 2001-03-28 | 2005-07-05 | Eastman Kodak Company | Event clustering of images using foreground/background segmentation |
| US20040030741A1 (en) | 2001-04-02 | 2004-02-12 | Wolton Richard Ernest | Method and apparatus for search, visual navigation, analysis and retrieval of information from networks with remote notification and content delivery |
| US20040021780A1 (en) * | 2002-07-31 | 2004-02-05 | Intel Corporation | Method and apparatus for automatic photograph annotation with contents of a camera's field of view |
| WO2004081853A1 (en) * | 2003-03-06 | 2004-09-23 | Animetrics, Inc. | Viewpoint-invariant image matching and generation of three-dimensional models from two-dimensional imagery |
| TWI255429B (en) * | 2003-12-29 | 2006-05-21 | Ind Tech Res Inst | Method for adjusting image acquisition parameters to optimize objection extraction |
| JP2005292064A (ja) | 2004-04-05 | 2005-10-20 | Sony Corp | ナビゲーション装置、およびデータ処理方法、並びにコンピュータ・プログラム |
| JP2006059136A (ja) * | 2004-08-20 | 2006-03-02 | Seiko Epson Corp | ビューア装置及びそのプログラム |
| JP2007018456A (ja) * | 2005-07-11 | 2007-01-25 | Nikon Corp | 情報表示装置及び情報表示方法 |
| US20080002864A1 (en) * | 2006-06-29 | 2008-01-03 | Eastman Kodak Company | Using background for searching image collections |
| EP2154481B1 (en) | 2007-05-31 | 2024-07-03 | Panasonic Intellectual Property Corporation of America | Image capturing device, additional information providing server, and additional information filtering system |
| US8364020B2 (en) * | 2007-09-28 | 2013-01-29 | Motorola Mobility Llc | Solution for capturing and presenting user-created textual annotations synchronously while playing a video recording |
| JP4956375B2 (ja) * | 2007-10-30 | 2012-06-20 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| US8150098B2 (en) * | 2007-12-20 | 2012-04-03 | Eastman Kodak Company | Grouping images by location |
| JP2010009192A (ja) * | 2008-06-25 | 2010-01-14 | Olympus Corp | 情報表示システム及びそれを用いた携帯情報端末 |
| CN102204238B (zh) * | 2008-09-02 | 2014-03-26 | 瑞士联邦理工大学,洛桑(Epfl) | 便携式设备上的图像标注 |
| US8890896B1 (en) * | 2010-11-02 | 2014-11-18 | Google Inc. | Image recognition in an augmented reality application |
-
2011
- 2011-11-17 EP EP20157605.5A patent/EP3678035A1/en not_active Withdrawn
- 2011-11-17 WO PCT/EP2011/070382 patent/WO2012084362A1/en active Application Filing
- 2011-11-17 CN CN201180061732.6A patent/CN103415849B/zh active Active
- 2011-11-17 JP JP2013545134A patent/JP6013363B2/ja active Active
- 2011-11-17 EP EP11785657.5A patent/EP2656245B1/en active Active
- 2011-11-17 US US13/995,578 patent/US9959644B2/en active Active
- 2011-11-17 KR KR1020137018883A patent/KR101867558B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| US20130311868A1 (en) | 2013-11-21 |
| JP2014501984A (ja) | 2014-01-23 |
| EP2656245B1 (en) | 2020-02-19 |
| EP2656245A1 (en) | 2013-10-30 |
| KR101867558B1 (ko) | 2018-06-15 |
| KR20140038355A (ko) | 2014-03-28 |
| EP3678035A1 (en) | 2020-07-08 |
| US9959644B2 (en) | 2018-05-01 |
| CN103415849B (zh) | 2019-11-15 |
| CN103415849A (zh) | 2013-11-27 |
| WO2012084362A1 (en) | 2012-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6013363B2 (ja) | ビューの画像の少なくとも1つの特徴に注釈付けするためのコンピュータ化された方法及びデバイス | |
| US10769438B2 (en) | Augmented reality | |
| US8661053B2 (en) | Method and apparatus for enabling virtual tags | |
| CN107111740B (zh) | 用于使用增强现实和对象辨别来检索内容项并使之与真实世界对象相关联的方案 | |
| KR101535579B1 (ko) | 증강 현실 인터액션 구현 방법 및 시스템 | |
| US9462175B2 (en) | Digital annotation-based visual recognition book pronunciation system and related method of operation | |
| EP3483723B1 (en) | Display apparatus and control method thereof | |
| US20160041981A1 (en) | Enhanced cascaded object-related content provision system and method | |
| US20150040074A1 (en) | Methods and systems for enabling creation of augmented reality content | |
| CN113111026A (zh) | 具有共享兴趣的消息的图库 | |
| EP2560145A2 (en) | Methods and systems for enabling the creation of augmented reality content | |
| US11232636B2 (en) | Methods, devices, and systems for producing augmented reality | |
| CN109189879A (zh) | 电子书籍显示方法及装置 | |
| US9600720B1 (en) | Using available data to assist in object recognition | |
| US10068157B2 (en) | Automatic detection of noteworthy locations | |
| Quack et al. | Object recognition for the internet of things | |
| KR20120099814A (ko) | 증강현실 컨텐츠 서비스 시스템과 장치 및 그 방법 | |
| KR101850501B1 (ko) | 역사 컨텐츠 제공 시스템 | |
| US20220350650A1 (en) | Integrating overlaid digital content into displayed data via processing circuitry using a computing memory and an operating system memory | |
| KR102671004B1 (ko) | Ar 관광 영상 기반의 관광 서비스 제공 방법, 시스템 및 이를 위한 장치 | |
| JP7240358B2 (ja) | 情報処理システム、情報処理方法、情報処理プログラム、およびサーバ | |
| US20230326094A1 (en) | Integrating overlaid content into displayed data via graphics processing circuitry and processing circuitry using a computing memory and an operating system memory | |
| Chao et al. | Mise en Scène: A film scholarship augmented reality mobile application | |
| Jain | Practical Architectures for Fused Visual and Inertial Mobile Sensing | |
| Lee et al. | Street searching service framework for navigation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150128 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20150217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150218 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150714 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20150821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151118 |
|
| AA92 | Notification that decision to refuse application was cancelled |
Free format text: JAPANESE INTERMEDIATE CODE: A971092 Effective date: 20151201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151225 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20151225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160208 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160506 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160803 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160829 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160921 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6013363 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |