JP6001934B2 - 重ね合わせ装置および重ね合わせ方法 - Google Patents
重ね合わせ装置および重ね合わせ方法 Download PDFInfo
- Publication number
- JP6001934B2 JP6001934B2 JP2012142389A JP2012142389A JP6001934B2 JP 6001934 B2 JP6001934 B2 JP 6001934B2 JP 2012142389 A JP2012142389 A JP 2012142389A JP 2012142389 A JP2012142389 A JP 2012142389A JP 6001934 B2 JP6001934 B2 JP 6001934B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- support
- unit
- support plate
- center position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 32
- 239000000758 substrate Substances 0.000 claims description 156
- 238000003384 imaging method Methods 0.000 claims description 38
- 239000012790 adhesive layer Substances 0.000 claims description 27
- 238000001514 detection method Methods 0.000 claims description 24
- 230000032258 transport Effects 0.000 description 16
- 238000012546 transfer Methods 0.000 description 15
- 230000003028 elevating effect Effects 0.000 description 14
- 239000000853 adhesive Substances 0.000 description 10
- 230000001070 adhesive effect Effects 0.000 description 10
- 230000008569 process Effects 0.000 description 10
- 238000003825 pressing Methods 0.000 description 8
- 238000010438 heat treatment Methods 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 229920005992 thermoplastic resin Polymers 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 239000010410 layer Substances 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000005304 joining Methods 0.000 description 4
- 239000002390 adhesive tape Substances 0.000 description 3
- 230000009477 glass transition Effects 0.000 description 3
- 238000010030 laminating Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 239000004925 Acrylic resin Substances 0.000 description 2
- 229920000178 Acrylic resin Polymers 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Chemical compound C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- -1 polytetrafluoroethylene Polymers 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 239000002904 solvent Substances 0.000 description 2
- 239000013032 Hydrocarbon resin Substances 0.000 description 1
- PEEHTFAAVSWFBL-UHFFFAOYSA-N Maleimide Chemical compound O=C1NC(=O)C=C1 PEEHTFAAVSWFBL-UHFFFAOYSA-N 0.000 description 1
- 239000004696 Poly ether ether ketone Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 238000007598 dipping method Methods 0.000 description 1
- 238000000227 grinding Methods 0.000 description 1
- 229920006270 hydrocarbon resin Polymers 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920002530 polyetherether ketone Polymers 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 238000004528 spin coating Methods 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 239000011800 void material Substances 0.000 description 1
- 230000037303 wrinkles Effects 0.000 description 1
Images





Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/681—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment using optical controlling means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/60—Editing figures and text; Combining figures or text
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6835—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6835—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
- H01L21/6836—Wafer tapes, e.g. grinding or dicing support tapes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68785—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by the mechanical construction of the susceptor, stage or support
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2221/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof covered by H01L21/00
- H01L2221/67—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere
- H01L2221/683—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L2221/68304—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
- H01L2221/68318—Auxiliary support including means facilitating the separation of a device or wafer from the auxiliary support
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2221/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof covered by H01L21/00
- H01L2221/67—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere
- H01L2221/683—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L2221/68304—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
- H01L2221/68327—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support used during dicing or grinding
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2221/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof covered by H01L21/00
- H01L2221/67—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere
- H01L2221/683—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L2221/68304—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
- H01L2221/68327—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support used during dicing or grinding
- H01L2221/68331—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support used during dicing or grinding of passive members, e.g. die mounting substrate
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2221/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof covered by H01L21/00
- H01L2221/67—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere
- H01L2221/683—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L2221/68304—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
- H01L2221/6834—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support used to protect an active side of a device or wafer
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2221/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof covered by H01L21/00
- H01L2221/67—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere
- H01L2221/683—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L2221/68304—Apparatus for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
- H01L2221/68381—Details of chemical or physical process used for separating the auxiliary support from a device or wafer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Computer Hardware Design (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Theoretical Computer Science (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Mechanical Treatment Of Semiconductor (AREA)
- Automation & Control Theory (AREA)
Description
上記重ね合わせ装置は、基板と、上記基板を支持する支持体とを、上記基板および上記支持体の少なくとも何れかに積層された接着層を介して重ね合わせることによって積層体を形成する。すなわち、積層体は、基板と、例えば熱可塑性樹脂を含む接着層と、上記基板を支持するサポートプレート(支持体)とがこの順に積層されて形成されている。接着層は、基板およびサポートプレートの何れか一方に接着剤が塗布されることによって、または、接着剤が塗布されてなる接着テープを貼着することによって形成され得る。そして、形成した積層体を、例えば、ロボットアーム等の搬送装置によって、貼付装置の所定位置に載置(セット)し、押圧力を掛けることにより、基板とサポートプレートとを貼り合わせることができる。
本発明に係る重ね合わせ装置は、一実施形態において、基板42とサポートプレート41とを貼り合わせる貼り合わせシステムに組み込むことができる。
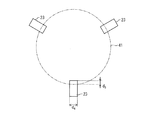
図2は、保持部3の概略の構成を示す図である。図2に示すように、保持部3は、撮像部(第一の撮像手段、第二の撮像手段)17a、17bおよび中心位置検出部19を備えており、重ね合わされる前の基板42またはサポートプレート41を保持するようになっている(なお、図2ではサポートプレート41を保持している場合について示す。)。
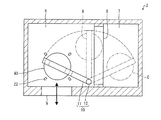
図3(a)は、重ね合わせ部6の概略の構成を示す図であり、図3(b)は、図3(a)を簡略化した図である。図3(a)に示すように、重ね合わせ部6は、昇降ステージ(支持手段)21、位置調整部(位置調整手段)22、掛止部材23、仮止め部(仮止め手段)24、ヒータ25および押圧部26を備えている。図3(b)に示すように、位置調整部22および掛止部材23は、水平方向に移動するようになっており、昇降ステージ21および仮止め部24は、鉛直方向に移動するようになっている。重ね合わせ部6には、サポートプレート41および基板42が別々に搬入される。
貼付部7は、位置合わせを行って重ね合わされた基板42とサポートプレート41とを貼り合わせる貼り合わせ手段を有している。貼り合わせ手段としては、基板42とサポートプレート41とを接着剤層を介して熱圧着により貼り合わせる構成が可能である。例えば、貼付部7内部の上下にプレスプレートを設け、この上下のプレスプレート間に、接合前の積層体40を挟み込めるようにする構成が可能である。
重ね合わせ部6および貼付部7は、一つの処理室の内部を二つの処理室に仕切る壁を設けた構造とすることができる。このほかにも重ね合わせ部6および貼付部7は、重ね合わせ部6と貼付部7とがそれぞれの側面において隙間なく互いに接している構造であってもよい。重ね合わせ部6および貼付部7の境界には、重ね合わせ部6および貼付部7間で積層体40の受け渡しを行うためのゲート8が設けられている。ゲート8はシャッターによって開閉が制御されている。また、重ね合わせ部6には、貼り合わせユニット2と外部搬送手段4との間でサポートプレート41、基板42および積層体40の受け渡しを行うための開閉可能な受け渡し窓9が設けられている。重ね合わせ部6および貼付部7にはそれぞれ、公知の減圧手段が設けられており(図示せず)、各室の内部圧の状態を独立に制御することができる。
続いて、本実施形態に係る重ね合わせ装置(保持部3および重ね合わせ部6)の概略動作(本実施形態に係る重ね合わせ方法)について説明する。
外部搬送手段4を用いて、サポートプレート41を保持部3に搬入する。そして、中心位置検出部19が、サポートプレート41の中心位置を検出する。詳細には、まず、撮像部17aおよび17bが、保持部3に保持されたサポートプレート41の端面を撮像する(撮像工程)。そして、中心位置検出部19が、撮像部17aおよび17bが撮像した複数の画像に基づいて、保持部3に保持されたサポートプレート41の中心位置を検出する(中心位置検出工程)。
外部搬送手段4を用いて、サポートプレート41を、受け渡し窓9を介して重ね合わせ部6内部に搬入し、昇降ステージ21上に載置する(搬送工程、図7(a)参照)。なお、この時点において、掛止部材23は抜き位置にしておき、仮止め部24は待機位置にしておくことが好ましい。
次に、サポートプレート41を載せた昇降ステージ21を、位置調整部22が存在する位置まで移動させる。そして、位置調整部22によって、(1)において検出したサポートプレート41の中心位置が、予め定められた中心軸に重なるように、サポートプレート41の水平方向における位置を調整する(重ね合わせ工程、図7(b)参照)。
サポートプレート41の位置合わせが終了した後、サポートプレート41を載せた昇降ステージ21を、掛止部材23を挿入する位置まで上昇させる。そして、掛止部材23を挿入位置に移動させる(図7(c)参照)。これにより、位置合わせを終えたサポートプレート41の水平方向の位置を変えずに掛止部材23によって保持させて、昇降ステージ21を再び下降させることができるようになる。
外部搬送手段4を用いて、基板42を保持部3に搬入する。そして、中心位置検出部19が、基板42の中心位置を検出する。詳細には、まず、撮像部17aおよび17bが、保持部3に保持された基板42の端面を撮像する(撮像工程)。そして、中心位置検出部19が、撮像部17aおよび17bが撮像した複数の画像に基づいて、保持部3に保持された基板42の中心位置を検出する(中心位置検出工程)。
外部搬送手段4を用いて、基板42を、受け渡し窓9を介して重ね合わせ部6内部に搬入し、昇降ステージ21上に配置させる(搬送工程、図7(d)参照)。基板42を重ね合わせ部6内に搬入し終えて、受け渡し窓9を閉じた後に、重ね合わせ部6の減圧を開始する。重ね合わせ部6の減圧は、仮止めが終了した時点における重ね合わせ部6の減圧状態および貼付部7の減圧状態が、互いにほぼ同じ状態になるように行えばよい。好適には、10Pa以下である。
次に、基板42を載せた昇降ステージ21を、位置調整部22が存在する位置まで移動させる。そして、位置調整部22によって、(5)において検出した基板42の中心位置が、予め定められた中心軸に重なるように、基板42の水平方向における位置を調整する(重ね合わせ工程、図7(e)参照)。
位置合わせを終えた基板42を載せた昇降ステージ21を、サポートプレート41と重ねる位置まで上昇させる。昇降ステージ21が当該位置に到達した後、仮止め部24をサポートプレート41上に移動させる。これにより、仮止め部24の接触面24aがサポートプレート41の表面に接して、サポートプレート41の表面を押圧した状態になる(重ね合わせ工程、図7(f)参照)。同時に、ヒータ25によって、接触面24aを加熱しておく。これによって、基板42とサポートプレート41との間の接着層を熱流動させ、仮止めする。
サポートプレート41を基板42とを重ね合わせた後、仮止め部24を待機位置に戻す。次いで、サポートプレート41と基板42とを重ね合わせた積層体40を載せた昇降ステージ21を下降させる。以上により、重ね合わせが終了する(図7(h)参照)。
ゲート8のシャッターを開いて、内部搬送手段10を、重ね合わせ部6に移動させ、積層体40を保持させる(図8(b)参照)。そして、内部搬送手段10が、積層体40を貼付部7に搬送する(図8(b)参照)。
2 貼り合わせユニット
3 保持部
4 外部搬送手段(搬送手段)
5 外部搬送手段走行路
6 重ね合わせ部(第1の処理室)
7 貼付部(第2の処理室)
8 ゲート
9 受け渡し窓
10 内部搬送手段
11 内部搬送アーム
12 アーム旋回軸
17a、17b 撮像部(第一の撮像手段、第二の撮像手段)
18a、18b 撮像領域
19 中心位置検出部
21 昇降ステージ(支持手段)
22 位置調整部(位置調節手段)
23 掛止部材
24 仮止め部(仮止め手段)
25 ヒータ(加熱手段)
26 押圧部
40 積層体
41 サポートプレート(支持体)
42 基板
50 FOUPオープナー
51 ベークプレート
52 スピンナー
53 パスライン
54 第2外部搬送手段
Claims (5)
- 基板と当該基板を支持する支持体とを重ね合わせる重ね合わせ部と、
重ね合わされる前の上記基板および上記支持体の端面を撮像する複数の撮像手段と、
上記撮像手段によって撮像される上記基板および上記支持体を保持する保持部と、
上記撮像手段が撮像した複数の画像から、上記基板および上記支持体のそれぞれの中心位置を検出するようになっている中心位置検出部と、
中心位置を検出した後の上記基板および上記支持体を上記保持部から上記重ね合わせ部へ搬送する搬送手段と、を備えており、
上記重ね合わせ部では、上記中心位置検出部が検出した上記基板および上記支持体の互いの中心位置が重なるように、上記基板および上記支持体を重ね合わせるようになっており、
上記重ね合わせ部は、上記中心位置検出部が検出した上記基板および上記支持体の互いの中心位置が重なるように、上記重ね合わせ部に搬送された上記基板および上記支持体の少なくとも一方の面内方向の位置を調整する位置調整手段を備えていることを特徴とする重ね合わせ装置。 - 上記撮像手段は、上記基板および上記支持体における第一の端面を撮像する第一の撮像手段と、上記基板および上記支持体における第一の端面とは異なる位置の第二の端面を撮像する第二の撮像手段とを備えていることを特徴とする請求項1に記載の重ね合わせ装置。
- 上記基板および上記支持体の少なくとも何れかには、接着層が積層されており、
上記重ね合わせ部は、上記基板と上記支持体とを、上記接着層を介して重ね合わせるようになっていることを特徴とする請求項1または2に記載の重ね合わせ装置。 - 上記重ね合わせ部は、中心位置を検出した後の上記基板および上記支持体のうちの一方を支持する支持手段と、中心位置を検出した後の上記基板および上記支持体のうちの他方を掛止する掛止部材とを備えており、上記支持体に支持された上記基板および上記支持体のうちの一方に、掛止部材に掛止された上記基板および上記支持体のうちの他方を、上記基板および上記支持体の互いの中心位置が重なるように重ね合わせるようになっていることを特徴とする請求項1〜3の何れか一項に記載の重ね合わせ装置。
- 基板と当該基板を支持する支持体とを重ね合わせる重ね合わせ方法であって、
複数の撮像手段によって、保持部に保持された重ね合わせる前の基板および支持体の端面を撮像する撮像工程と、
上記撮像工程において撮像した複数の画像から、上記基板および上記支持体のそれぞれの中心位置を検出する中心位置検出工程と、
中心位置を検出した上記基板および上記支持体を上記保持部から重ね合わせ部へ搬送する搬送工程と、
上記重ね合わせ部において、上記中心位置検出工程において検出した上記基板および上記支持体の互いの中心位置が重なるように、上記基板および上記支持体を重ね合わせる重ね合わせ工程と、を包含しており、
上記重ね合わせ工程では、上記中心位置検出工程において検出した上記基板および上記支持体の互いの中心位置が重なるように、上記重ね合わせ部に搬送された上記基板および上記支持体の少なくとも一方の面内方向の位置を調整することを特徴とする重ね合わせ方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012142389A JP6001934B2 (ja) | 2012-06-25 | 2012-06-25 | 重ね合わせ装置および重ね合わせ方法 |
| PCT/JP2013/062572 WO2014002609A1 (ja) | 2012-06-25 | 2013-04-30 | 重ね合わせ装置および重ね合わせ方法 |
| KR1020157001241A KR101677864B1 (ko) | 2012-06-25 | 2013-04-30 | 중첩 장치 및 중첩 방법 |
| US14/409,137 US9911637B2 (en) | 2012-06-25 | 2013-04-30 | Overlapping device, and overlapping method |
| TW102117205A TWI524463B (zh) | 2012-06-25 | 2013-05-15 | 重疊裝置及重疊方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012142389A JP6001934B2 (ja) | 2012-06-25 | 2012-06-25 | 重ね合わせ装置および重ね合わせ方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014007299A JP2014007299A (ja) | 2014-01-16 |
| JP2014007299A5 JP2014007299A5 (ja) | 2016-03-10 |
| JP6001934B2 true JP6001934B2 (ja) | 2016-10-05 |
Family
ID=49782783
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012142389A Active JP6001934B2 (ja) | 2012-06-25 | 2012-06-25 | 重ね合わせ装置および重ね合わせ方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9911637B2 (ja) |
| JP (1) | JP6001934B2 (ja) |
| KR (1) | KR101677864B1 (ja) |
| TW (1) | TWI524463B (ja) |
| WO (1) | WO2014002609A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101603536B1 (ko) * | 2012-12-21 | 2016-03-15 | 가부시키가이샤 신가와 | 플립 칩 본더 및 본딩 스테이지의 평탄도 및 변형량 보정 방법 |
| JP6412786B2 (ja) * | 2014-12-03 | 2018-10-24 | 東京応化工業株式会社 | 搬送方法 |
| US10825705B2 (en) * | 2015-05-15 | 2020-11-03 | Suss Microtec Lithography Gmbh | Apparatus, system, and method for handling aligned wafer pairs |
| JP6756600B2 (ja) * | 2016-12-14 | 2020-09-16 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP7291577B2 (ja) * | 2019-08-28 | 2023-06-15 | 芝浦メカトロニクス株式会社 | 移送装置および実装装置 |
| JP7580811B2 (ja) * | 2022-03-29 | 2024-11-12 | Aiメカテック株式会社 | 基板貼り合わせ装置及び基板貼り合わせ方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4535907B2 (ja) * | 2005-03-03 | 2010-09-01 | 日東電工株式会社 | 判別機能付き位置決め装置 |
| JP4781802B2 (ja) * | 2005-12-06 | 2011-09-28 | 東京応化工業株式会社 | サポートプレートの貼り合わせ手段及び貼り合わせ装置、並びにサポートプレートの貼り合わせ方法 |
| JP4750724B2 (ja) | 2007-01-25 | 2011-08-17 | 東京応化工業株式会社 | 重ね合わせユニット及び貼り合わせ装置 |
| JP4744458B2 (ja) * | 2007-01-31 | 2011-08-10 | 東京エレクトロン株式会社 | 基板位置決め装置および基板位置決め方法 |
| TWI471971B (zh) * | 2007-10-30 | 2015-02-01 | 尼康股份有限公司 | Substrate holding member, substrate bonding apparatus, laminated substrate manufacturing apparatus, substrate bonding method, laminated substrate manufacturing method, and laminated semiconductor device manufacturing method |
| US8060330B2 (en) | 2008-12-12 | 2011-11-15 | Lam Research Corporation | Method and system for centering wafer on chuck |
| JP5477053B2 (ja) * | 2010-03-02 | 2014-04-23 | 株式会社ニコン | 重ね合わせ装置、ウェハホルダ、位置検出方法およびデバイスの製造方法 |
| JP6014302B2 (ja) * | 2010-09-06 | 2016-10-25 | 東京応化工業株式会社 | 貼り合わせ装置および貼り合わせ方法 |
| JP2013033809A (ja) * | 2011-08-01 | 2013-02-14 | Tokyo Electron Ltd | ウエハ搬送装置 |
-
2012
- 2012-06-25 JP JP2012142389A patent/JP6001934B2/ja active Active
-
2013
- 2013-04-30 KR KR1020157001241A patent/KR101677864B1/ko active IP Right Grant
- 2013-04-30 US US14/409,137 patent/US9911637B2/en active Active
- 2013-04-30 WO PCT/JP2013/062572 patent/WO2014002609A1/ja active Application Filing
- 2013-05-15 TW TW102117205A patent/TWI524463B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| KR101677864B1 (ko) | 2016-11-18 |
| KR20150034179A (ko) | 2015-04-02 |
| US9911637B2 (en) | 2018-03-06 |
| WO2014002609A1 (ja) | 2014-01-03 |
| US20150194329A1 (en) | 2015-07-09 |
| TW201413863A (zh) | 2014-04-01 |
| TWI524463B (zh) | 2016-03-01 |
| JP2014007299A (ja) | 2014-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6001934B2 (ja) | 重ね合わせ装置および重ね合わせ方法 | |
| JP5759086B2 (ja) | 貼付方法 | |
| JP5990037B2 (ja) | 重ね合わせ装置および重ね合わせ方法 | |
| CN110416142B (zh) | 接合装置、接合系统以及接合方法 | |
| JP6412786B2 (ja) | 搬送方法 | |
| KR101617316B1 (ko) | 디바이스 웨이퍼와 캐리어 웨이퍼의 본딩/디본딩 방법 및 본딩/디본딩 장치 | |
| JP6014302B2 (ja) | 貼り合わせ装置および貼り合わせ方法 | |
| JP6352014B2 (ja) | 厚さ測定器 | |
| JP2007158122A (ja) | サポートプレートの貼り合わせ手段及び貼り合わせ装置、並びにサポートプレートの貼り合わせ方法 | |
| TWI618180B (zh) | 接合裝置、接合系統、接合方法及電腦記憶媒體 | |
| JP6001941B2 (ja) | 積層体形成方法および積層体形成システム | |
| JP6596353B2 (ja) | 貼付装置、貼付システム、及び貼付方法 | |
| JP6670185B2 (ja) | 重ね合わせ装置、貼付装置、重ね合わせ方法および貼付方法 | |
| WO2014050494A1 (ja) | 搬送方法、貼付方法および貼付装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160121 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20160121 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20160408 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160830 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160902 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6001934 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |