JP5913570B2 - クレーン及びクレーンを作動させる方法 - Google Patents
クレーン及びクレーンを作動させる方法 Download PDFInfo
- Publication number
- JP5913570B2 JP5913570B2 JP2014509327A JP2014509327A JP5913570B2 JP 5913570 B2 JP5913570 B2 JP 5913570B2 JP 2014509327 A JP2014509327 A JP 2014509327A JP 2014509327 A JP2014509327 A JP 2014509327A JP 5913570 B2 JP5913570 B2 JP 5913570B2
- Authority
- JP
- Japan
- Prior art keywords
- crane
- support
- jack
- outrigger
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 20
- 238000001514 detection method Methods 0.000 claims description 38
- 230000008859 change Effects 0.000 claims description 18
- 239000002184 metal Substances 0.000 claims description 16
- 229910052751 metal Inorganic materials 0.000 claims description 16
- CWYNVVGOOAEACU-UHFFFAOYSA-N Fe2+ Chemical compound [Fe+2] CWYNVVGOOAEACU-UHFFFAOYSA-N 0.000 claims description 12
- 239000000463 material Substances 0.000 claims description 4
- 230000003287 optical effect Effects 0.000 claims description 2
- 239000011358 absorbing material Substances 0.000 claims 1
- 238000005259 measurement Methods 0.000 description 9
- 238000012544 monitoring process Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 4
- -1 ferrous metals Chemical class 0.000 description 4
- 230000000087 stabilizing effect Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000005389 magnetism Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000004904 shortening Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 241000282485 Vulpes vulpes Species 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003467 diminishing effect Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
- B66C23/78—Supports, e.g. outriggers, for mobile cranes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Jib Cranes (AREA)
Description
本願は、2011年5月4日に出願された米国特許出願第13/100,758
号に基づく優先権を主張しており、該米国特許出願の開示内容は、これに言及することによりその全体が本明細書に組み入れられている。
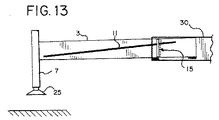
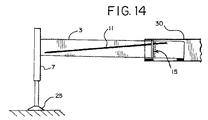
反作用力を受け、ビームは、三角記号a,bによって特定されている位置において、主としてビームとボックス30との間に作用する反作用力によって支持される。

5 第二のアウトリガビーム、
7 逆さジャッキ、
9 逆さジャッキ、
11 第一の磁気ストリップ、
13 第二の磁気ストリップ、
15 第一の磁気センサー、
17 第二の磁気センサー、
19 タイヤ、
21 タイヤ、
25 アウトリガパッド、
27 アウトリガパッド、
30 アウトリガボックス、
50 クレーン、
51 伸縮式ブーム、
53 キャリアユニット、
55 上部旋回体、
60 アウトリガ装置、前方のアウトリガの組、
62 後方のアウトリガの組、
a,a’,b,b’ 作用点、
C クレーン、
M ビームの質量、
Claims (17)
- クレーンであって、
コントローラと、
支持部、及び該支持部に対して移動軸線に沿って可動であるビームを有する少なくとも1つのアウトリガと、
前記ビームに搭載されたジャッキであって、選択的に伸長して支持面と接して当該クレーンを支持可能であり、当該クレーンの重量が前記ジャッキに近づく方向又は前記ジャッキから離れる方向に移動したときに前記支持部に対して少量だけ上下に動くようにされたジャッキと、
前記アウトリガの伸長の程度を判定するとともに、前記アウトリガが所望の作業位置にあるときに前記ジャッキが伸長されて前記クレーンを支持するように前記支持面に係合しているか否かを判定する非機械式装置と、を備え、
前記非機械式装置が、
a)前記移動軸線に対して非平行な向きで前記ビームか前記支持部かのどちらか一方に取り付けられている一連の検知点と、
b)前記ビームが前記移動軸線に沿って移動する間において前記一連の検知点を異なる位置で横切るようにして、前記ビームか前記支持部かのどちらか他方に取り付けられている非機械式センサーと、を備えており、
c)前記非機械式センサーは、前記ビームが前記移動軸線に沿って動くときに前記一連の検知点の位置を検知し、
d)前記非機械式センサーは、該非機械式センサーが検知した前記支持部に対する前記ビームの相対位置を示す第一の信号、及び前記ジャッキが前記支持面と係合して当該クレーンを支持していることを示す第二の信号を前記コントローラに提供する、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであって、
前記一連の検知点が磁気ストリップからなり、前記非機械式センサーが磁気センサーである、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであって、
前記一連の検知点が磁気ストリップからなり、前記非機械式センサーが磁気スイッチのアレイからなる、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであって、
前記一連の検知点が電流を流すワイヤーからなり、前記非機械式センサーが電流を検知する機器のアレイからなる、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであって、
前記ビームが鉄系金属によって構成されており、前記一連の検知点が非鉄系金属によって構成されており、前記非機械式センサーが鉄系金属と非鉄系金属とを区別する素子のアレイからなる、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであって、
前記一連の検知点が、光反射性材料、光吸収性材料、及びこれらの組合せからなる群から選択された材料からなり、前記非機械式センサーが光センサーのアレイからなる、ことを特徴とするクレーン。 - 請求項1に記載のクレーンであって、
前記一連の検知点が細長い発光素子からなり、前記非機械式センサーが光センサーのアレイからなる、ことを特徴とするクレーン。 - 請求項1〜7のうちのいずれか一項に記載のクレーンであり、
前記第二の信号が、前記第一の信号に続いて且つ前記ジャッキが前記支持面と接するように伸長せしめられた後に引き続いて提供され、前記第二の信号は、前記移動軸線を横切る方向に前記ジャッキによって前記ビームにかけられる力の結果として、前記支持部に対する前記ビームの位置の相対的な変化を示している、ことを特徴とするクレーン。 - 請求項1〜8のうちのいずれか一項に記載のクレーンであり、
前記クレーンを選択的に支持するために多数のアウトリガを備えており、各アウトリガが、支持部と、移動軸線に沿って該支持部に対して可動のビームとを備えており、且つ前記移動軸線に対して非平行な向きで前記ビームか前記支持部かのいずれか一方に取り付けられている一連の検知点と、前記ビームが前記軸線に沿って移動する際に種々の位置で前記一連の検知点を横切る方向で前記ビームか前記支持部かのいずれか他方に取り付けられている非機械式センサーとを有している、ことを特徴とするクレーン。 - 請求項1〜9のうちのいずれか一項に記載のクレーンであり、
前記一連の検知点が前記ビームの表面上を対角線に沿って延びており、前記非機械式センサーは、前記支持部に取り付けられており且つ直線状で前記ビームの移動軸線に対して概ね直角である、ことを特徴とするクレーン。 - 請求項1〜7のいずれか一項に記載のクレーンであり、
前記コントローラが、前記第一の信号と前記第二の信号との間の差によって表される直線位置を表す出力の予期される変化を検知したときに、該コントローラは前記ジャッキが該クレーンを支持していると判定する、ことを特徴とするクレーン。 - 請求項11に記載のクレーンであり、
前記コントローラが前記非機械式センサーの出力信号を連続的に監視して該クレーンが作業中に位置を変えたか否かを判定する、ことを特徴とするクレーン。 - ビームのための支持部に対する位置を非機械的に判定する方法であり、前記ビームは前記支持部に対して移動軸線に沿って可動であり、
a)一連の検知点を、前記移動軸線と非平行な向きで前記ビームか前記支持部かのどちらか一方に取り付けるステップと、
b)非機械式センサーを、前記ビームが前記移動軸線に沿って移動する間において前記一連の検知点を異なる位置において横切るようにして、前記ビームか前記支持部かのどちらか他方に対して関連付けるステップと、
c)前記ビームが前記移動軸線に沿って移動するときに、前記一連の検知点の位置を前記非機械式センサーによって検知するステップと、
d)前記非機械式センサーによって検知された前記支持部に対する前記ビームの相対位置を示す第一の信号を前記非機械式センサーから提供し、前記移動軸線に交わる方向での前記ビームに作用する力による前記支持部に対する前記ビームの位置の相対的変化を示す第二の信号を前記非機械式センサーから提供するステップと、
を含む方法。 - クレーンを作動させる方法であり、
該クレーンは、コントローラと、少なくとも1つのアウトリガと、ジャッキとを備えており、該アウトリガは、支持部、及び該支持部に対して移動軸線に沿って可動のビームを備え、前記ジャッキは、前記ビームに搭載され、支持面に接触するまで選択的に伸長して当該クレーンを支持可能とされており、
a)前記移動軸線に対して非平行な向きで前記ビームか前記支持部かのいずれか一方に取り付けられた一連の検知点を設けるステップと、
b)前記ビームが前記移動軸線に沿って移動する間において異なる位置で前記一連の検知点を横切る方向で、前記ビームか前記支持部かのいずれか他方に取り付けられた非機械式センサーを設けるステップと、
c)前記ビームが前記移動軸線に沿って移動する際に、前記非機械式センサーに対する前記一連の検知点の位置を検知するステップと、
d)前記非機械式センサーによって検知された、前記支持部に対する前記ビームの相対位置を示す第一の信号を前記非機械式センサーから前記コントローラに提供するステップと、
e)前記ジャッキを支持面に係合するまで降ろして、前記ジャッキが前記支持面に係合して前記クレーンを支持していることを示す第二の信号を前記非機械式センサーから前記コントローラに提供するステップと、
を含むことを特徴とする方法。 - 請求項14に記載の方法であり、
前記第二の信号が、前記ジャッキによって前記移動軸線を横切る方向に前記ビームにかけられる力の結果としての前記支持部に対する前記ビームの相対位置変化を表している、ことを特徴とする方法。 - 請求項14又は15に記載の方法であり、
前記第一及び第二の信号を前記クレーンのためのコントローラに付与し、前記第一の信号と前記第二の信号との差によって示される位置の出力変化を検知し、それによって前記ジャッキが前記クレーンを支持していると判定するステップと、を更に含んでいる、ことを特徴とする方法。 - クレーンであって、
コントローラと、
ジャッキを有する少なくとも1つのアウトリガと、
前記クレーンに対する前記アウトリガの伸長の程度、及び支持面に対する前記ジャッキの係合状態を判定する非機械式装置と、を備え
前記アウトリガが、支持部と、該支持部に対して移動軸線に沿って移動可能なビームとを有しており、
前記非機械式装置が、
a)前記移動軸線に対して非平行な向きで前記ビームか前記支持部かのどちらか一方に取り付けられている一連の検知点と、
b)前記ビームが前記移動軸線に沿って移動する間において非機械的な前記一連の検知点を異なる位置で横切るようにして、前記ビームか前記支持部かのどちらか他方に取り付けられている非機械式センサーと、を備えており、
c)前記非機械式センサーは、前記ビームが前記移動軸線に沿って動くときに前記一連の検知点の位置を検知し、
d)前記非機械式センサーは、前記コントローラに該非機械式センサーが検知した前記支持部に対する前記ビームの相対位置を示す第一の信号、及び前記ジャッキの係合状態を示す第二の信号を提供する、ことを特徴とするクレーン。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/100,758 US8881919B2 (en) | 2011-05-04 | 2011-05-04 | System for measuring length of a beam extension and detecting support |
| US13/100,758 | 2011-05-04 | ||
| PCT/US2012/035477 WO2012151125A2 (en) | 2011-05-04 | 2012-04-27 | System for measuring length of a beam extension and detecting support |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014513025A JP2014513025A (ja) | 2014-05-29 |
| JP5913570B2 true JP5913570B2 (ja) | 2016-04-27 |
Family
ID=47089534
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014509327A Active JP5913570B2 (ja) | 2011-05-04 | 2012-04-27 | クレーン及びクレーンを作動させる方法 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US8881919B2 (ja) |
| EP (1) | EP2704977B1 (ja) |
| JP (1) | JP5913570B2 (ja) |
| CN (1) | CN103648957B (ja) |
| BR (1) | BR112013028363A2 (ja) |
| CA (1) | CA2834844A1 (ja) |
| ES (1) | ES2620309T3 (ja) |
| IN (1) | IN2013CN09017A (ja) |
| RU (1) | RU2013153732A (ja) |
| WO (1) | WO2012151125A2 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010056584B4 (de) * | 2010-12-30 | 2018-03-29 | Asm Automation Sensorik Messtechnik Gmbh | Mobile Arbeitsmaschine |
| US20130079974A1 (en) * | 2011-09-23 | 2013-03-28 | Manitowoc Crane Companies, Llc | Outrigger monitoring system and methods |
| US9365398B2 (en) * | 2012-10-31 | 2016-06-14 | Manitowoc Crane Companies, Llc | Outrigger pad monitoring system |
| CN103043578B (zh) * | 2012-12-30 | 2015-05-20 | 浙江鼎力机械股份有限公司 | 铝合金单桅柱防倾支撑的高空作业平台 |
| CN103043579B (zh) * | 2012-12-30 | 2015-05-20 | 浙江鼎力机械股份有限公司 | 铝合金双桅柱防倾支撑的高空作业平台 |
| CN103043574B (zh) * | 2012-12-30 | 2015-05-20 | 浙江鼎力机械股份有限公司 | 一种防倾支撑的高空作业平台机座 |
| CN103043576B (zh) * | 2012-12-30 | 2015-04-15 | 浙江鼎力机械股份有限公司 | 剪叉式防倾支撑的高空作业平台 |
| CN103043582B (zh) * | 2012-12-30 | 2015-04-15 | 浙江鼎力机械股份有限公司 | 高空作业平台的防倾支撑装置 |
| US9550475B1 (en) * | 2015-09-09 | 2017-01-24 | Altec Industries, Inc. | Securely deploying outrigger foot |
| DE102016011189B4 (de) * | 2016-09-15 | 2024-06-27 | Liebherr-Werk Ehingen Gmbh | Vorrichtung zum Stabilisieren eines Krans |
| CN106495001A (zh) * | 2016-11-08 | 2017-03-15 | 泸州汉硕信息科技有限公司 | 基于应力应变技术的起重机支腿受力监测系统 |
| IT201700019360A1 (it) * | 2017-02-21 | 2018-08-21 | Manitou Italia Srl | Stabilizzatori perfezionati per macchine operatrici semoventi |
| CN108120412B (zh) * | 2018-01-24 | 2023-08-22 | 三一汽车制造有限公司 | 间隙检测装置和机械设备 |
| US10821945B2 (en) * | 2018-03-02 | 2020-11-03 | Manitowoc Crane Companies, Llc | Outrigger pad assembly having a force sensor |
| CN108862037A (zh) * | 2018-07-31 | 2018-11-23 | 徐州重型机械有限公司 | 一种起重机用基于光波原理的支腿长度测量方法 |
| US10875753B2 (en) | 2018-09-20 | 2020-12-29 | Manitou Equipment America, Llc | Telehandler boom extension monitoring system |
| GB2582261B (en) | 2019-03-01 | 2023-06-21 | Bamford Excavators Ltd | Working machine |
| GB2582260B (en) | 2019-03-01 | 2023-03-08 | Bamford Excavators Ltd | Working machine |
| GB201903399D0 (en) | 2019-03-01 | 2019-04-24 | Bamford Excavators Ltd | A working machine and a controller |
| US12012309B2 (en) * | 2019-11-22 | 2024-06-18 | Construction Robotics, Llc | Intuitive control of lifting equipment |
| KR102298591B1 (ko) * | 2020-06-09 | 2021-09-03 | 강정구 | 아웃트리거용 리드선 단선 방지장치 |
| ZA202110395B (en) | 2020-12-30 | 2023-11-29 | Manitou Italia Srl | Telehandler with facilitated alignment adjustment |
| CN114965050A (zh) * | 2022-05-12 | 2022-08-30 | 佳诺威集团股份有限公司 | 一种高密度纤维板强度检测装置 |
| GB2619764B (en) * | 2022-06-17 | 2024-10-23 | Caterpillar Inc | Automatic levelling of work machine |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2339563A1 (fr) * | 1976-01-27 | 1977-08-26 | Ppm Sa | Structure telescopique munie d'un detecteur de la position relative de deux troncons |
| JPH0732299Y2 (ja) | 1989-11-29 | 1995-07-26 | 株式会社アイチコーポレーション | アウトリガ張出位置検出器 |
| JPH03105188U (ja) * | 1990-02-15 | 1991-10-31 | ||
| WO1995000372A1 (fr) * | 1993-06-28 | 1995-01-05 | Kabushiki Kaisha Komatsu Seisakusho | Dispositif de mise a niveau pour corps de vehicule de chantier dote de verins-supports |
| JPH08301578A (ja) * | 1995-05-08 | 1996-11-19 | Aichi Corp | アウトリガの自動張出装置 |
| JP2766232B2 (ja) | 1995-10-27 | 1998-06-18 | 株式会社アイチコーポレーション | ジャッキ接地検出器 |
| JPH09156478A (ja) * | 1995-12-04 | 1997-06-17 | Shin Meiwa Ind Co Ltd | アウトリガ張出位置検出装置 |
| US6712536B2 (en) * | 2001-10-09 | 2004-03-30 | Alps Electric Co., Ltd. | Printer |
| US7221151B2 (en) | 2003-01-31 | 2007-05-22 | Delphi Technologies, Inc. | Magnetic array position sensor |
| JP4068042B2 (ja) * | 2003-10-27 | 2008-03-26 | 株式会社アイチコーポレーション | 作業車の制御装置 |
| JP2007283864A (ja) | 2006-04-14 | 2007-11-01 | Furukawa Unic Corp | アウトリガ張出検出装置 |
| JP5474617B2 (ja) * | 2010-03-10 | 2014-04-16 | 株式会社モリタホールディングス | 高所作業車用アウトリガジャッキ装置 |
-
2011
- 2011-05-04 US US13/100,758 patent/US8881919B2/en active Active
-
2012
- 2012-04-27 CA CA2834844A patent/CA2834844A1/en not_active Abandoned
- 2012-04-27 EP EP12779649.8A patent/EP2704977B1/en active Active
- 2012-04-27 WO PCT/US2012/035477 patent/WO2012151125A2/en active Application Filing
- 2012-04-27 ES ES12779649.8T patent/ES2620309T3/es active Active
- 2012-04-27 RU RU2013153732/11A patent/RU2013153732A/ru not_active Application Discontinuation
- 2012-04-27 JP JP2014509327A patent/JP5913570B2/ja active Active
- 2012-04-27 CN CN201280033223.7A patent/CN103648957B/zh not_active Expired - Fee Related
- 2012-04-27 IN IN9017CHN2013 patent/IN2013CN09017A/en unknown
- 2012-04-27 BR BR112013028363A patent/BR112013028363A2/pt not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| CN103648957A (zh) | 2014-03-19 |
| US20120279938A1 (en) | 2012-11-08 |
| RU2013153732A (ru) | 2015-06-10 |
| ES2620309T3 (es) | 2017-06-28 |
| JP2014513025A (ja) | 2014-05-29 |
| CA2834844A1 (en) | 2012-11-08 |
| EP2704977A2 (en) | 2014-03-12 |
| WO2012151125A2 (en) | 2012-11-08 |
| EP2704977B1 (en) | 2017-02-01 |
| IN2013CN09017A (ja) | 2015-08-07 |
| US8881919B2 (en) | 2014-11-11 |
| BR112013028363A2 (pt) | 2017-01-24 |
| EP2704977A4 (en) | 2015-04-29 |
| CN103648957B (zh) | 2017-02-08 |
| WO2012151125A3 (en) | 2013-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5913570B2 (ja) | クレーン及びクレーンを作動させる方法 | |
| US9073739B2 (en) | Controller for restricting movement of a load handling apparatus | |
| JP5998204B2 (ja) | オートコンクリートポンプ | |
| US9365398B2 (en) | Outrigger pad monitoring system | |
| US9511985B2 (en) | Industrial truck with optical lifting height measurement | |
| US8779306B2 (en) | Weight sensing method and apparatus for forklifts | |
| US20200109040A1 (en) | Machine, Controller and Control Method | |
| JP7189489B2 (ja) | 移動式クレーン及びクレーンシステム | |
| US20230227300A1 (en) | Machine stability detection and indication for mobile lifting equipment | |
| JP7189490B2 (ja) | 位置調節補助装置及び移動式クレーン | |
| JP2019116348A (ja) | 位置調整装置、これを備えたクレーン及びウェイト結合方法 | |
| KR20160073248A (ko) | 지게차의 캐리지 실제높이 확인 구조 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150331 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150625 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150724 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5913570 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |