JP5877323B2 - 光学式アブソリュートエンコーダ及び装置 - Google Patents
光学式アブソリュートエンコーダ及び装置 Download PDFInfo
- Publication number
- JP5877323B2 JP5877323B2 JP2011124810A JP2011124810A JP5877323B2 JP 5877323 B2 JP5877323 B2 JP 5877323B2 JP 2011124810 A JP2011124810 A JP 2011124810A JP 2011124810 A JP2011124810 A JP 2011124810A JP 5877323 B2 JP5877323 B2 JP 5877323B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- offset
- abnormality
- sine wave
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Description
前記90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常しきい値を記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、
前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力して前記発光素子が不点灯である状態を判定することを特徴とする。
分割された間隔に同期した1回転でNサイクルの90度位相差の2つの正弦波信号を用いて内挿演算を行うことによって生成される1回転下位データと、前記1回転上位データと前記1回転下位データを合成して1回転位置データを生成する光学式アブソリュートエンコーダにおいて、
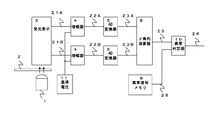
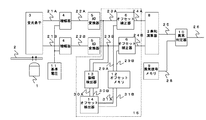
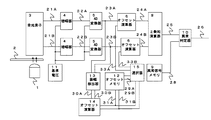
前記90度位相差の2つの正弦波信号のそれぞれ最大値、最小値を検出する振幅検出器と、前記振幅検出器で検出した最大値と最小値から正弦波信号の中心値を演算するオフセット演算器と、前記オフセット演算器で求めた結果を記録するオフセットメモリと、前記90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、前記2つの正弦波信号のそれぞれの中心値と振幅値と位相許容とを考慮した許容すべき誤差より小さく設定した前記2つの正弦波信号の異常しきい値を記録する異常信号メモリと、前記2つの正弦波信号の異常を判定する異常判定器からなり、前記2つの正弦波信号は前記光学式アブソリュートエンコーダの製造時または前記光学式アブソリュートエンコーダの前回電源投入時の前記オフセットメモリで記憶した中心値を用いてオフセットのずれを補正した後、前記2乗和演算器でそれぞれ2乗して加算した演算結果が、前記異常信号メモリに記録した前記異常しきい値より下回った場合に前記異常判定器が異常信号を出力して前記発光素子が不点灯である状態を判定する。
Nサイクルの90度位相差の2つの正弦波信号を用いて内挿演算を行うことによって生成される1回転下位データと、前記1回転上位データと前記1回転下位データを合成して1回転位置データを生成する光学式アブソリュートエンコーダにおいて、前記90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常しきい値を記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力するため、部品を追加することなく容易な手段で発光素子が不点灯である異常の診断を行うことができる。
異常しきい値より下回った場合に前記異常判定器が異常信号を出力するため、正弦波信号の振幅レベルが小さい場合にも光学系の異常を誤検出することなく、精度よく発光素子が不点灯である異常の診断を行うことができる。
2 回転板
3 受光素子
4 増幅器
5 AD変換器
6 オフセット補正器
8 2乗和演算器
9 異常信号メモリ
10 異常判定器
11 基準電圧
12 オフセットメモリ
13 振幅検出器
14 オフセット演算器
15 選択器
16 オフセット補償部
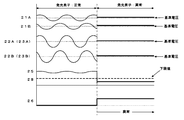
21A SIN原信号
21B COS原信号
22A 増幅後SIN信号
22B 増幅後COS信号
23A AD変換後SIN信号
23B AD変換後COS信号
24A オフセット補正後SIN信号
24B オフセット補正後COS信号
25 2乗和信号
26 異常信号
28 異常信号しきい値
29A SINオフセットメモリ値
29B COSオフセットメモリ値
30A SIN振幅値
30B COS振幅値
31A SINオフセット演算値
31B COSオフセット演算値
33A SINオフセット選択値
33B COSオフセット選択値
Claims (2)
- 回転板へ発光する発光素子と、前記回転板のスリットを1回転でN等分に分割して生成する1回転上位データと、前記N等分に分割された間隔に同期した1回転でNサイクルの90度位相差の2つの正弦波信号を用いて内挿演算を行うことによって生成される1回転下位データと、前記1回転上位データと前記1回転下位データを合成して1回転位置データを生成する光学式アブソリュートエンコーダにおいて、
前記90度位相差の2つの正弦波信号のそれぞれ最大値、最小値を検出する振幅検出器と、前記振幅検出器で検出した最大値と最小値から正弦波信号の中心値を演算するオフセット演算器と、前記オフセット演算器で求めた結果を記録するオフセットメモリと、前記90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、
前記2つの正弦波信号のそれぞれの中心値と振幅値と位相許容とを考慮した許容すべき誤差より小さく設定した前記2つの正弦波信号の異常しきい値を記録する異常信号メモリと、前記2つの正弦波信号の異常を判定する異常判定器からなり、
前記2つの正弦波信号は前記光学式アブソリュートエンコーダの製造時または前記光学式アブソリュートエンコーダの前回電源投入時の前記オフセットメモリで記憶した中心値を用いてオフセットのずれを補正した後、前記2乗和演算器でそれぞれ2乗して加算した演算結果が、前記異常信号メモリに記録した前記異常しきい値より下回った場合に前記異常判定器が異常信号を出力して前記発光素子が不点灯である状態を判定する光学式アブソリュートエンコーダ。 - 請求項1に記載の光学式アブソリュートエンコーダを具備する装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011124810A JP5877323B2 (ja) | 2011-06-03 | 2011-06-03 | 光学式アブソリュートエンコーダ及び装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011124810A JP5877323B2 (ja) | 2011-06-03 | 2011-06-03 | 光学式アブソリュートエンコーダ及び装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012251879A JP2012251879A (ja) | 2012-12-20 |
| JP5877323B2 true JP5877323B2 (ja) | 2016-03-08 |
Family
ID=47524822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011124810A Active JP5877323B2 (ja) | 2011-06-03 | 2011-06-03 | 光学式アブソリュートエンコーダ及び装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5877323B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110873582A (zh) * | 2018-08-29 | 2020-03-10 | 富士电机株式会社 | 编码器、处理装置及处理方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0518785A (ja) * | 1991-07-11 | 1993-01-26 | Yokogawa Electric Corp | 光学式エンコーダ |
| JPH0518783A (ja) * | 1991-07-11 | 1993-01-26 | Yokogawa Electric Corp | 光学式エンコーダ |
| JPH05240664A (ja) * | 1992-02-28 | 1993-09-17 | Yokogawa Electric Corp | エンコーダ |
| JPH10300518A (ja) * | 1997-04-24 | 1998-11-13 | Canon Inc | 信号異常検知回路及びこれを用いた変位情報検出装置 |
| JP2006284521A (ja) * | 2005-04-05 | 2006-10-19 | Sendai Nikon:Kk | エンコーダ |
| JP4737609B2 (ja) * | 2005-10-05 | 2011-08-03 | 株式会社ニコン | エンコーダ |
| JP4797721B2 (ja) * | 2005-10-20 | 2011-10-19 | 株式会社デンソー | 回転角度検出装置 |
| JP5125320B2 (ja) * | 2007-08-28 | 2013-01-23 | パナソニック株式会社 | エンコーダの補正値制御方法 |
| JP5550213B2 (ja) * | 2008-03-04 | 2014-07-16 | ハイデンハイン株式会社 | 光学式アブソリュートエンコーダ |
-
2011
- 2011-06-03 JP JP2011124810A patent/JP5877323B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110873582A (zh) * | 2018-08-29 | 2020-03-10 | 富士电机株式会社 | 编码器、处理装置及处理方法 |
| CN110873582B (zh) * | 2018-08-29 | 2021-10-22 | 富士电机株式会社 | 编码器、处理装置及处理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012251879A (ja) | 2012-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7711508B2 (en) | Position detector | |
| KR102195533B1 (ko) | 로터리 인코더 및 로터리 인코더의 각도 보정 방법 | |
| CN102506905B (zh) | 一种高精度绝对式编码器 | |
| CN107860404B (zh) | 旋转编码器及旋转编码器的绝对角度位置检测方法 | |
| CN108426590B (zh) | 旋转编码器 | |
| JP5995589B2 (ja) | 補正値導出装置、変位量導出装置、制御装置、および補正値導出方法 | |
| JP5402313B2 (ja) | エンコーダおよび信号処理方法 | |
| JP5115419B2 (ja) | 光学式エンコーダ | |
| JP5877323B2 (ja) | 光学式アブソリュートエンコーダ及び装置 | |
| JP2007218667A (ja) | エンコーダのオフセット補正回路 | |
| WO2014061380A1 (ja) | 位置検出装置 | |
| US9134143B2 (en) | Absolute position detector with abnormality detection function | |
| JP5190644B2 (ja) | エンコーダの誤差補正方法 | |
| JP2018132357A (ja) | ロータリエンコーダ | |
| JP6413102B2 (ja) | 光学式エンコーダ | |
| US11493898B2 (en) | Servo motor controller | |
| JP6182729B2 (ja) | 光学式エンコーダ | |
| JP6106839B2 (ja) | エンコーダ | |
| JP2013047693A (ja) | エンコーダ及びエンコーダのパターン検出方法 | |
| JP5341267B1 (ja) | 変位量検出装置、およびその誤差・検出・評価方法 | |
| JP4763821B2 (ja) | 角度補正回路、rdコンバータ及び角度検出装置 | |
| JP5006270B2 (ja) | 絶対型エンコーダ装置とその操作方法 | |
| JP2018132359A (ja) | ロータリエンコーダ | |
| JP2006125853A (ja) | 位置検出方式 | |
| CN117040206A (zh) | 高精度伺服电机及电气设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131210 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140106 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140418 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140708 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140904 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20141007 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150825 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150907 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5877323 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |