JP5864880B2 - 内視鏡装置及び内視鏡装置の作動方法 - Google Patents
内視鏡装置及び内視鏡装置の作動方法 Download PDFInfo
- Publication number
- JP5864880B2 JP5864880B2 JP2011085435A JP2011085435A JP5864880B2 JP 5864880 B2 JP5864880 B2 JP 5864880B2 JP 2011085435 A JP2011085435 A JP 2011085435A JP 2011085435 A JP2011085435 A JP 2011085435A JP 5864880 B2 JP5864880 B2 JP 5864880B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- blur correction
- parameter information
- image
- correction parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique
- A61B5/1128—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique using image analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/683—Vibration or motion blur correction performed by a processor, e.g. controlling the readout of an image memory
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1107—Measuring contraction of parts of the body, e.g. organ, muscle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
Description
1.1.内視鏡装置
図1に本実施形態の内視鏡装置の第1の構成例を示す。内視鏡装置は、制御装置300(プロセッサ部)、撮像部102(挿入部)を含む。
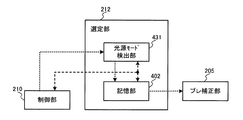
図2に、選定部の第1の詳細な構成例を示す。選定部212は、撮像部検出部401、記憶部402(記録部)を含む。撮像部検出部401は、記憶部402と双方向に接続している。撮像部検出部401は、ブレ補正部205へ接続している。制御部210は、撮像部検出部401、記憶部402と双方向に接続している。
図3に、ブレ補正部の第1の詳細な構成例を示す。ブレ補正部205は、補間部301、輝度算出部302、分割部303、動き量検出部304、補正部305、ブロック領域設定部306(ブロック領域特定部)、検出領域設定部307(検出領域特定部)を含む。
Y(x,y)=a1*R(x,y)+b1*G(x,y)+c1*B(x,y)
(1)
I’=I+moveX,
J’=J+moveY (2)
上記のように、同じ画角の場合、撮像画像の画像サイズが小さければ小さいほど解像力が劣る。これが原因で検出領域サイズ、ブロックサイズを適応的に変更して対応しても動き量を正しく検出できない場合がある。そこで本実施形態では、動き量を検出する前に、画像からエッジ情報を検出し、検出したエッジ情報を用いて強調処理を行う構成にしてもよい。以下では、このような本実施形態の第1の変形例について説明する。
次に、本実施形態の第2の変形例について説明する。第2の変形例では、撮像素子203のセンサー配列構成が異なる場合、動き量を検出する手法を適応的に変更する。例えば図5に示すように、プログレッシブ方式とインターレース方式に対応して、ブレ補正手法を手法1と手法2に切り替える。
R(x,y) =(R(x−1,y)+R(x+1,y))/2,
B(x+1,y)=(B(x,y)+B(x+2,y))/2 (3)
2.1.構成例
次に、第2の実施形態について説明する。第2の実施形態では、観察者モードに応じて適応的にブレ補正を行う。
BlurX=moveX−moveXav,
BlurY=moveY−moveYav,
moveXav’=(moveXav+moveX)/2,
moveYav’=(moveYav+moveY)/2 (4)
上記実施形態では、医師の診察経験に合わせてブレ補正手法を選定する構成となっているが、本実施形態はこれに限定されず、例えば観察モードに応じてブレ補正手法を選定する構成にしてもよい。以下では、このような本実施形態の変形例について説明する。
3.1.構成例
次に、第3の実施形態について説明する。第3の実施形態では、通常観察と拡大観察に応じたブレ補正処理を行う。
T=t1+t2 (5)
上記の実施形態では、シャッタースピードを調整することでブレを抑制しているが、本実施形態ではこれに限定されず、フレームレートを調整することでブレを抑制してもよい。以下では、このような本実施形態の変形例について説明する。
次に、第4の実施形態について説明する。第4の実施形態では、白色光光源と特殊光光源を切り替え、光源に応じたブレ補正処理を行う。
151 光源、153 照明光学系、201 レンズ系、203 撮像素子、
204 A/D変換部、205 ブレ補正部、207 画像処理部、
208 表示部、210 制御部、211 外部I/F部、212 選定部、
214 画像記憶部、215 光源制御部、216 レンズ制御部、
217 撮像素子制御部、251 観察倍率制御部、252 露光時間制御部、
253 シャッター制御部、254 フレームレート制御部、
255 光源切替制御部、300 制御装置、301 補間部、
302 輝度算出部、303 分割部、304 動き量検出部、
305 補正部、306 ブロック領域設定部、307 検出領域設定部、
311 エッジ強調処理部、401 撮像部検出部、402 記憶部、
411 観察者モード検出部、421 観察モード検出部、
431 光源モード検出部、501 エッジ検出部、502 強度制御部、
503 強調処理部、504 加算部、
B_height 縦幅、B_width 横幅、EA 終了座標、
HEIGHT 縦幅、I,J 座標、SA 開始座標、SB ブロック中心点、
T,t1,t2 期間、WIDTH 横幅
Claims (24)
- 撮像光学系と撮像素子を有し、撮像画像の撮像を行う撮像部と、
複数のブレ補正用パラメータ情報の中から、使用するブレ補正用パラメータ情報を選定する選定部と、
前記撮像画像における被写体の動き量を検出する動き量検出部と、
検出された前記動き量に基づいて、前記撮像画像のブレを補正するブレ補正部と、
観察モード、観察者モード、露光時間、観察倍率、光源の種類のうち少なくとも1つの情報である観察情報を設定する設定部と、
を含み、
前記選定部は、
内視鏡装置に装着された前記撮像部の撮像方式及び前記観察情報に応じて前記ブレ補正用パラメータ情報を選定し、
前記動き量検出部は、
選定された前記ブレ補正用パラメータ情報に対応する検出手法により前記動き量を検出することを特徴とする内視鏡装置。 - 請求項1において、
前記内視鏡装置は、複数種類の前記撮像部を着脱可能であり、
前記選定部は、
前記内視鏡装置に装着された前記撮像部の種類を検出する撮像部検出部と、
前記複数種類の撮像部に対応する前記複数のブレ補正用パラメータ情報を記憶する記憶部と、
を有し、
前記選定部は、
記憶された前記複数のブレ補正用パラメータ情報の中から、装着された前記撮像部の種類に応じた前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項2において、
前記撮像画像における被写体の動き量を検出する動き量検出部と、
前記撮像画像に対して複数のブロック領域を設定するブロック領域設定部と、
前記撮像画像を前記複数のブロック領域に分割する分割部と、
前記撮像画像において前記動き量を検出する対象となる領域を設定する検出領域設定部と、
を含み、
前記選定部は、
前記ブロック領域のサイズ及び前記検出対象領域のサイズについての前記ブレ補正用パラメータ情報を、装着された前記撮像部の撮像素子サイズに応じて選定し、
前記動き量検出部は、
選定された前記ブレ補正用パラメータ情報に対応するサイズの前記ブロック領域及び前記検出対象領域を用いて、前記動き量を検出することを特徴とする内視鏡装置。 - 請求項1において、
前記撮像方式は、
単板インターレース方式、単板プログレッシブ方式、2板撮像素子方式、又は3板撮像素子方式であることを特徴とする内視鏡装置。 - 請求項1において、
前記撮像部が、G画像の撮像を行う第1の撮像素子と、R画像とB画像の撮像を行う第2の撮像素子と、を有する場合、
前記選定部は、
前記G画像から前記動き量を検出する前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
前記撮像部が、G画像の撮像を行う第1の撮像素子と、R画像の撮像を行う第2の撮像素子と、B画像の撮像を行う第3の撮像素子と、を有する場合、
前記選定部は、
前記G画像と前記R画像と前記B画像に基づく輝度画像信号から前記動き量を検出する前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
前記撮像部が、インターレース方式の撮像を行う場合、
前記選定部は、
奇数水平走査線の画像信号に基づいて第1の動き量を検出し、偶数水平走査線の画像信号に基づいて第2の動き量を検出する前記ブレ補正用パラメータ情報を選定し、
前記ブレ補正部は、
前記第1の動き量に基づいて前記奇数水平走査線の画像信号のブレ補正を行い、前記第2の動き量に基づいて前記偶数水平走査線の画像信号のブレ補正を行うことを特徴とする内視鏡装置。 - 請求項1において、
前記撮像部が、R画像とG画像とB画像を時系列に撮像する面順次方式の撮像を行う場合、
前記選定部は、
R画像に基づいて第1の動き量を検出し、G画像に基づいて第2の動き量を検出し、B画像に基づいて第3の動き量を検出する前記ブレ補正用パラメータ情報を選定し、
前記ブレ補正部は、
前記第1の動き量に基づいて前記R画像のブレ補正を行い、前記第2の動き量に基づいて前記G画像のブレ補正を行い、前記第3の動き量に基づいて前記B画像のブレ補正を行うことを特徴とする内視鏡装置。 - 請求項2において、
前記撮像画像に対してエッジ強調処理を行うエッジ強調処理部を含み、
前記選定部は、
装着された前記撮像部の前記撮像素子が第1のサイズである場合、前記エッジ強調処理の第1の強度に対応する前記ブレ補正用パラメータ情報を選定し、
前記撮像素子が前記第1のサイズよりも小さい第2のサイズである場合に、前記第1の強度よりも強い第2の強度に対応する前記ブレ補正用パラメータ情報を選定し、
前記エッジ強調処理部は、
選定された前記ブレ補正用パラメータ情報に対応する強度で前記エッジ強調処理を行うことを特徴とする内視鏡装置。 - 請求項1において、
被写体を観察する前記観察モードを設定する観察モード設定部を前記設定部として含み、
前記選定部は、
設定された前記観察モードを検出する観察モード検出部と、
複数の観察モードに対応する前記複数のブレ補正用パラメータ情報を記憶する記憶部と、
を有し、
前記選定部は、
記憶された前記複数のブレ補正用パラメータ情報の中から、検出された前記観察モードに対応する前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項10において、
前記記憶部は、
前記ブレ補正の強弱レベルについてのブレ補正用パラメータ情報を記憶し、
前記選定部は、
スクリーニングモードが検出された場合、第1のレベルに対応するブレ補正用パラメータ情報を選定し、
精査モードが検出された場合、前記第1のレベルよりも強い第2のレベルに対応するブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
前記選定部は、
前記ブレ補正を行うか否かについての前記ブレ補正用パラメータ情報を選定し、
前記ブレ補正部は、
選定された前記ブレ補正用パラメータ情報に基づいて、前記ブレ補正を行うか否かを決定することを特徴とする内視鏡装置。 - 請求項12において、
被写体を観察する観察モードを設定する観察モード設定部を含み、
前記選定部は、
設定された前記観察モードを検出する観察モード検出部と、
前記ブレ補正を行うか否かについての前記ブレ補正用パラメータ情報を記憶する記憶部と、
を有し、
前記選定部は、
スクリーニングモードが検出された場合、前記ブレ補正を行わないブレ補正用パラメータ情報を選定し、
精査モードが検出された場合、前記ブレ補正を行うブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
前記内視鏡装置を操作する観察者に応じた前記観察者モードを設定する観察者モード設定部を前記設定部として含み、
前記選定部は、
設定された前記観察者モードを検出する観察者モード検出部と、
複数の観察者モードに対応する前記複数のブレ補正用パラメータ情報を記憶する記憶部と、
を有し、
前記選定部は、
記憶された前記複数のブレ補正用パラメータ情報の中から、検出された前記観察者モードに対応する前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項14において、
前記記憶部は、
前記動き量の検出に用いられる前記撮像画像のフレーム数についてのブレ補正用パラメータ情報を記憶し、
前記選定部は、
第1の観察者モードが検出された場合に、第1のフレーム数に対応するブレ補正用パラメータ情報を選定し、
第2の観察者モードが検出された場合に、前記第1のフレーム数よりも多い第2のフレーム数に対応するブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項15において、
前記第2の観察者モードは、
前記第1の観察者モードに対応する観察者よりも熟練度の高い観察者に対応することを特徴とする内視鏡装置。 - 請求項14において、
前記観察者により前記観察者モードが入力される入力部を含み、
前記選定部は、
入力された前記観察者モードに応じて前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
前記撮像の前記露光時間を制御する露光時間制御部を前記設定部として含み、
前記露光時間制御部は、
前記選定部により選定された前記ブレ補正用パラメータ情報に基づいて、前記露光時間を調整する制御を行うことを特徴とする内視鏡装置。 - 請求項18において、
前記選定部は、
通常観察の場合、第1の露光時間に対応する前記ブレ補正用パラメータ情報を選定し、
拡大観察の場合、前記第1の露光時間よりも短い第2の露光時間に対応する前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
前記撮像部の前記観察倍率を制御する観察倍率制御部を前記設定部として含み、
前記選定部は、
前記観察倍率に対応する前記複数のブレ補正用パラメータ情報を記憶する記憶部を有し、
前記選定部は、
記憶された前記複数のブレ補正用パラメータ情報の中から、前記観察倍率に応じて前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項1において、
白色光を発生する白色光光源と、特定の波長帯域の光である特殊光を発生する特殊光光源とを前記光源の種類として切り替える制御を行う光源切替制御部を前記設定部として含み、
前記選定部は、
被写体に照射されている前記光源の種類を検出する光源モード検出部と、
光源に対応する前記複数のブレ補正用パラメータ情報を記憶する記憶部を有し、
前記選定部は、
記憶された前記複数のブレ補正用パラメータ情報の中から、検出された前記光源の種類に応じて前記ブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項21において、
前記記憶部は、
前記ブレ補正の強弱レベルについてのブレ補正用パラメータを記憶し、
前記選定部は、
前記白色光の照射により取得された前記撮像画像の場合、第1のレベルに対応するブレ補正用パラメータ情報を選定し、
前記特殊光の照射により取得された前記撮像画像の場合、前記第1のレベルよりも弱い第2のレベルに対応するブレ補正用パラメータ情報を選定することを特徴とする内視鏡装置。 - 請求項21において、
前記特定の波長帯域は、
前記白色光の波長帯域よりも狭い帯域であることを特徴とする内視鏡装置。 - 内視鏡装置の作動方法であって、
内視鏡装置が、観察モード、観察者モード、露光時間、観察倍率、光源の種類のうち少なくとも1つの情報である観察情報を設定し、
前記内視鏡装置が、複数のブレ補正用パラメータ情報の中から、使用するブレ補正用パラメータ情報を、撮像部の撮像方式及び前記観察情報に応じて選定し、
前記内視鏡装置が、選定された前記ブレ補正用パラメータ情報に対応する検出手法により、前記撮像画像における被写体の動き量を検出し、
前記内視鏡装置が、検出された前記動き量に基づいて、前記撮像画像のブレを補正することを特徴とする内視鏡装置の作動方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011085435A JP5864880B2 (ja) | 2011-04-07 | 2011-04-07 | 内視鏡装置及び内視鏡装置の作動方法 |
| US13/440,800 US9498153B2 (en) | 2011-04-07 | 2012-04-05 | Endoscope apparatus and shake correction processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011085435A JP5864880B2 (ja) | 2011-04-07 | 2011-04-07 | 内視鏡装置及び内視鏡装置の作動方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012217579A JP2012217579A (ja) | 2012-11-12 |
| JP2012217579A5 JP2012217579A5 (ja) | 2014-05-22 |
| JP5864880B2 true JP5864880B2 (ja) | 2016-02-17 |
Family
ID=47006128
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011085435A Expired - Fee Related JP5864880B2 (ja) | 2011-04-07 | 2011-04-07 | 内視鏡装置及び内視鏡装置の作動方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9498153B2 (ja) |
| JP (1) | JP5864880B2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5657375B2 (ja) * | 2010-12-24 | 2015-01-21 | オリンパス株式会社 | 内視鏡装置及びプログラム |
| US9317916B1 (en) * | 2013-04-12 | 2016-04-19 | Aic Innovations Group, Inc. | Apparatus and method for recognition of medication administration indicator |
| JP6230409B2 (ja) | 2013-12-20 | 2017-11-15 | オリンパス株式会社 | 内視鏡装置 |
| JP6519144B2 (ja) | 2014-11-06 | 2019-05-29 | ソニー株式会社 | 内視鏡システム、画像処理装置、画像処理方法、およびプログラム |
| JP6062112B2 (ja) * | 2015-01-05 | 2017-01-18 | オリンパス株式会社 | 内視鏡システム |
| JP6758287B2 (ja) | 2015-05-18 | 2020-09-23 | ソニー株式会社 | 制御装置及び医療用撮像システム |
| JP2017109037A (ja) * | 2015-12-18 | 2017-06-22 | オリンパス株式会社 | 撮像システム |
| WO2017122287A1 (ja) * | 2016-01-13 | 2017-07-20 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| JP2017158764A (ja) * | 2016-03-09 | 2017-09-14 | ソニー株式会社 | 画像処理装置、画像処理方法、及び記録媒体 |
| JP6561000B2 (ja) | 2016-03-09 | 2019-08-14 | 富士フイルム株式会社 | 内視鏡システム及びその作動方法 |
| WO2017168528A1 (ja) | 2016-03-28 | 2017-10-05 | オリンパス株式会社 | 画像処理装置、画像処理方法および画像処理プログラム |
| JP7127538B2 (ja) * | 2016-03-29 | 2022-08-30 | ソニーグループ株式会社 | 画像処理装置、医療機器の作動方法及び医療システム |
| EP3437547A4 (en) * | 2016-03-31 | 2019-04-03 | Sony Olympus Medical Solutions Inc. | MEDICAL OBSERVATION DEVICE, IMAGING CORRECTION SYSTEM AND MEDICAL OBSERVATION SYSTEM |
| JP6900953B2 (ja) * | 2016-07-26 | 2021-07-14 | ソニーグループ株式会社 | 画像処理装置および方法、内視鏡システム、並びにプログラム |
| JP6538634B2 (ja) * | 2016-09-30 | 2019-07-03 | 富士フイルム株式会社 | プロセッサ装置及び内視鏡システム並びにプロセッサ装置の作動方法 |
| KR102615296B1 (ko) * | 2016-11-04 | 2023-12-19 | 한국전기연구원 | 내시경 영상 안정화 방법 및 시스템 |
| US10904437B2 (en) * | 2017-03-16 | 2021-01-26 | Sony Corporation | Control apparatus and control method |
| EP3610779A4 (en) * | 2017-05-17 | 2020-05-13 | Sony Corporation | IMAGE ACQUISITION SYSTEM, CONTROL DEVICE AND IMAGE ACQUISITION METHOD |
| JP7016681B2 (ja) * | 2017-12-01 | 2022-02-07 | ソニー・オリンパスメディカルソリューションズ株式会社 | 内視鏡システム |
| WO2020009127A1 (ja) * | 2018-07-06 | 2020-01-09 | ソニー株式会社 | 医療用観察システム、医療用観察装置、及び医療用観察装置の駆動方法 |
| CN113271839A (zh) * | 2019-01-21 | 2021-08-17 | 奥林巴斯株式会社 | 内窥镜装置和内窥镜系统 |
| JP7235532B2 (ja) * | 2019-02-25 | 2023-03-08 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用画像処理装置、画像処理方法およびプログラム |
| WO2020203164A1 (ja) * | 2019-03-29 | 2020-10-08 | ソニー株式会社 | 医療システム、情報処理装置及び情報処理方法 |
| CN112689094B (zh) * | 2020-12-28 | 2022-12-27 | 维沃移动通信有限公司 | 摄像头防抖提示方法、装置及电子设备 |
| WO2023106010A1 (ja) * | 2021-12-10 | 2023-06-15 | ソニーセミコンダクタソリューションズ株式会社 | 電子機器 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2048609B (en) * | 1979-03-30 | 1983-05-25 | Hitachi Electronics | Solid-state colour imaging camera |
| JP3112472B2 (ja) | 1990-09-26 | 2000-11-27 | オリンパス光学工業株式会社 | 物体の移動速度検出装置およびカメラの像ぶれ補正装置 |
| JP2953079B2 (ja) * | 1991-02-14 | 1999-09-27 | 富士写真光機株式会社 | 電子内視鏡装置 |
| JP3353949B2 (ja) * | 1993-06-17 | 2002-12-09 | オリンパス光学工業株式会社 | 撮像システム |
| US6630950B1 (en) * | 1998-03-19 | 2003-10-07 | Canon Kabushiki Kaisha | Apparatus for improving image vibration suppression |
| JP2000078459A (ja) * | 1998-09-03 | 2000-03-14 | Hitachi Ltd | ビデオカメラ |
| JP2000152191A (ja) * | 1998-11-13 | 2000-05-30 | Nec Corp | ノンインターレース画像表示処理装置及び表示処理方法 |
| JP3865759B2 (ja) * | 2000-04-26 | 2007-01-10 | 松下電器産業株式会社 | 撮像装置 |
| JP2002209838A (ja) * | 2001-01-22 | 2002-07-30 | Olympus Optical Co Ltd | 内視鏡撮像装置 |
| JP4402850B2 (ja) * | 2001-03-16 | 2010-01-20 | 富士フイルム株式会社 | 鑑賞用データ補正方法および装置並びに記録媒体 |
| JP4398159B2 (ja) * | 2003-01-31 | 2010-01-13 | オリンパス株式会社 | 撮像装置 |
| US8013909B2 (en) * | 2004-12-29 | 2011-09-06 | Nokia Corporation | Method and apparatus for adjusting exposure in digital imaging |
| JP4979271B2 (ja) * | 2006-05-29 | 2012-07-18 | オリンパス株式会社 | 内視鏡システムおよび内視鏡の作動方法 |
| JP2008149027A (ja) * | 2006-12-19 | 2008-07-03 | Olympus Corp | 内視鏡装置 |
| JP4958610B2 (ja) * | 2007-04-06 | 2012-06-20 | キヤノン株式会社 | 画像防振装置、撮像装置及び画像防振方法 |
| DE102007026337B4 (de) * | 2007-06-06 | 2016-11-03 | Arnold & Richter Cine Technik Gmbh & Co. Betriebs Kg | Digitale Kamera |
| KR101392732B1 (ko) * | 2007-08-20 | 2014-05-08 | 삼성전자주식회사 | 손떨림에 의한 움직임 추정 장치 및 방법, 그를 이용한영상 촬상 장치 |
| JP2009165553A (ja) | 2008-01-11 | 2009-07-30 | Olympus Medical Systems Corp | 医療用画像処理装置及び医療用撮像システム |
| JP5545612B2 (ja) * | 2009-01-14 | 2014-07-09 | 富士フイルム株式会社 | 画像処理システム、画像処理方法、及びプログラム |
| JP5570769B2 (ja) | 2009-07-23 | 2014-08-13 | オリンパス株式会社 | 内視鏡装置、計測方法、およびプログラム |
| JP5606120B2 (ja) * | 2010-03-29 | 2014-10-15 | 富士フイルム株式会社 | 内視鏡装置 |
-
2011
- 2011-04-07 JP JP2011085435A patent/JP5864880B2/ja not_active Expired - Fee Related
-
2012
- 2012-04-05 US US13/440,800 patent/US9498153B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012217579A (ja) | 2012-11-12 |
| US20120262559A1 (en) | 2012-10-18 |
| US9498153B2 (en) | 2016-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5864880B2 (ja) | 内視鏡装置及び内視鏡装置の作動方法 | |
| JP5396121B2 (ja) | 画像処理装置、撮像装置、画像処理プログラムおよび画像処理装置の作動方法 | |
| JP5814698B2 (ja) | 自動露光制御装置、制御装置、内視鏡装置及び内視鏡装置の作動方法 | |
| JP4599398B2 (ja) | 画像処理装置及び内視鏡装置 | |
| JP5953187B2 (ja) | 合焦制御装置、内視鏡システム及び合焦制御方法 | |
| JP5570373B2 (ja) | 内視鏡システム | |
| US8723937B2 (en) | Endoscope system, imaging apparatus, and control method | |
| US8531510B2 (en) | Endoscope apparatus | |
| JP5984681B2 (ja) | 蛍光観察装置 | |
| US10335014B2 (en) | Endoscope system, processor device, and method for operating endoscope system | |
| WO2013061819A1 (ja) | 内視鏡システム | |
| JP5698476B2 (ja) | 内視鏡システム、内視鏡システムの作動方法及び撮像装置 | |
| JP2003334163A (ja) | 内視鏡画像処理装置 | |
| WO2016185763A1 (ja) | 光源制御装置及び光源制御方法並びに撮像システム | |
| JP2008178481A (ja) | 画像処理装置 | |
| US20120071718A1 (en) | Endoscope apparatus and method of controlling endoscope apparatus | |
| JP2012085720A (ja) | 内視鏡装置 | |
| WO2016088628A1 (ja) | 画像評価装置、内視鏡システム、画像評価装置の作動方法および画像評価装置の作動プログラム | |
| JP2010279526A (ja) | 内視鏡画像処理装置および方法ならびにプログラム | |
| JP6346501B2 (ja) | 内視鏡装置 | |
| JP6242552B1 (ja) | 画像処理装置 | |
| JP6137892B2 (ja) | 撮像システム | |
| JP5985117B1 (ja) | 撮像装置、画像処理装置、撮像装置の作動方法 | |
| JP5856943B2 (ja) | 撮像システム | |
| JP6251059B2 (ja) | 電子内視鏡システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140404 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140404 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150608 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151020 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151225 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5864880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |