JP5848085B2 - 画像読取システムおよび原稿サイズ検出装置 - Google Patents
画像読取システムおよび原稿サイズ検出装置 Download PDFInfo
- Publication number
- JP5848085B2 JP5848085B2 JP2011217919A JP2011217919A JP5848085B2 JP 5848085 B2 JP5848085 B2 JP 5848085B2 JP 2011217919 A JP2011217919 A JP 2011217919A JP 2011217919 A JP2011217919 A JP 2011217919A JP 5848085 B2 JP5848085 B2 JP 5848085B2
- Authority
- JP
- Japan
- Prior art keywords
- document
- image
- image reading
- area
- medium
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 42
- 230000008859 change Effects 0.000 claims description 15
- 230000032258 transport Effects 0.000 description 41
- 238000000034 method Methods 0.000 description 35
- 230000008569 process Effects 0.000 description 28
- 238000010586 diagram Methods 0.000 description 21
- 238000000926 separation method Methods 0.000 description 7
- 230000007723 transport mechanism Effects 0.000 description 7
- 238000003705 background correction Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 238000007599 discharging Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 230000033228 biological regulation Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 101100311460 Schizosaccharomyces pombe (strain 972 / ATCC 24843) sum2 gene Proteins 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000010410 layer Substances 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
Images
























Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Image Input (AREA)
- Facsimile Scanning Arrangements (AREA)
Description
原稿の画像を読み取る画像読取装置と、前記画像読取装置を制御する制御装置とを備えた画像読取システムであって、
原稿を搬送路に沿って搬送する搬送手段と、
前記画像読取装置における前記搬送路の途中に設けられ且つ原稿の厚みに応じて前記搬送路から離れる方向に移動可能に設けられ、前記搬送路に沿って搬送される原稿の画像を読み取る画像読取手段を有する画像読取ユニットと、
前記画像読取手段で読み取った原稿の画像データに所定の処理を施す画像処理手段とを備え、
前記画像処理手段は、原稿の先端が前記画像読取ユニットの手前に位置するタイミングで読み取った第1領域と、前記画像読取ユニットの端部に原稿が接触して前記画像読取ユニットが前記搬送路から離れる方向に移動しながら前記画像読取手段の読取位置に原稿が到達するまでの間に読み取った第2領域と、前記画像読取手段の読取位置に原稿が対向する間に読み取った第3領域とを有する画像データから、前記第2領域と前記第3領域との境界を原稿領域とそれ以外の背景領域との境界部分として検出する
ことを特徴とする画像読取システムが提供される。これにより、原稿の厚みが異なっても、原稿の影を正確に検出することができる。
図1は、本発明に係る画像読取装置1の構成を示す図である。画像読取装置1は、コンピュータ等の外部装置に接続されて、その外部装置からの操作によってスキャン動作を行う装置である。具体的には、図1に示すように、原稿Dをピックアップするピックアップローラ2と、ピックアップローラ2によりピックアップされた原稿Dを装置内に給送する給送ローラ3と、ピックアップされた原稿Dを1枚ずつ分離する分離ローラ4と、給紙した原稿を排紙口まで搬送するためのローラ対8と、原稿の上面の画像情報を読取る画像読取手段となるラインイメージセンサ(コンタクトイメージセンサ)5と、このラインイメージセンサ5の上流側に配置されて原稿を検知するレジストセンサ6とを備える。また、画像読取装置2のピックアップローラ2側の給送部には、原稿Dが載置されたことを検出する原稿検知センサ9を備えている。
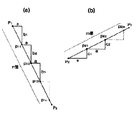
イズ検知、並びに斜行補正について説明する。これらの処理は、画像処理部22で行われる。画像読取装置1は、図4(b)のように、(読取り可能最大幅)×(原稿長さにマージンを付加した長さ)のサイズの画像を読み取る。そして、原稿と背景の境界を検知する処理を行う。図11は、読取画像を示す。座標系は、読取画像の左上端を原点としたxy座標系である。本実施の形態では、xy座標系における各画素の濃度値をf(x、y)とし、濃度値f(x、y)は、明るい程大きい値とする。なお、本実施形態では、x軸方向が主走査方向であり、y軸方向が副走査方向である。図内ライン1、ライン2・・・・ライン40・・・・は、副走査方向の走査を示している。
f(x,y) :注目画素
f(x,y+m):注目画素からdライン先の画素の濃度値(d=1)
(g,h)=(a, sum1/n) ・・・(3)
n<mのとき
(g,h)=(a,sum2/m)
h=√((x1−x2)2+(y1−y2)2)
x=Xcosθ−Ysinθ+x1 (7)
y=Xsinθ−Ycosθ+y1
(x,y):回転前の画素位置
(X,Y):回転後の画素位置
但し、ここでは、角度θは時計回りに測定される角度としている。また、本実施例では斜線領域B´の濃度値は255とする。
G´=G+k×(R×G×B) (8)
B´=B+k×(R×G×B)
なお、上記R、G、Bはそれぞれ入力値であり、上記R´、G´、B´はそれぞれ出力地であり、上記kは係数である。
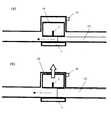
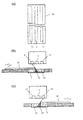
以下、上述した実施形態1では、普通の紙媒体と、紙媒体よりも相対的に厚手であり高剛性のプラスチックカード等のカード媒体との両方を1つの装置で読取可能な構成例について詳細に説明する。以下に説明する画像読取装置は、上述した実施形態1と同様に、厚みのある原稿を搬送して画像を読み取る際には、原稿が画像読取手段を押し上げる構成を採用し、それ以外の画像読取や画像処理の処理は上述した実施形態1で説明した手法を適用することができる。図23(A)は本発明の一実施形態に係る画像読取装置Aの外観図、図23(B)は図23(A)の線I−Iに沿う画像読取装置Aの概略断面図、図24は画像読取装置Aの平面図、図25(A)は図23(A)の線II−IIに沿う画像読取装置Aの概略断面図である。
1 画像読取装置
2 ピックアップローラ
3 搬送ローラ
4 分離ローラ
5 ラインイメージセンサ
6 レジストセンサ
7 色基準部材
8 ローラ
9 原稿検知センサ
10 センサユニット
11 光源
12 ガラス
13 影
14 センサユニットの端からラインイメージセンサまでの長さ
15 原稿がセンサユニットを押し上げる前のマージン画像
16 原稿がセンサユニットを押し上げたときのマージン画像
17 原稿画像
18 厚み判定部
20 電気部品全体構成
21 A/D変換部
22 画像処理部
23 画像メモリ
24 インターフェース部
25 信号ケーブル
26 CPU
27 バス
28 モータードライバ
29 モータ
30、31 はみ出し領域
32 読取り領域
33 読取り領域
40 厚紙用給紙手段
41 原稿検知センサ
42 方向
43 反射板
44、45 影の長さ
46、47 グラフ
48〜50 交点
1102 原稿
1103 原稿画像
1104 読取画像
1105 影
1301、1302 サイズ検知結果
1303 読取画像
1304〜1307 原稿と背景の境界線
1601、1603 読取画像
1602 原稿画像
1604〜1607 原稿と背景の境界線
1608〜1611 交点
1612〜1615 外接四角形の一辺
Claims (8)
- 原稿の画像を読み取る画像読取装置と、前記画像読取装置を制御する制御装置とを備えた画像読取システムであって、
原稿を搬送路に沿って搬送する搬送手段と、
前記画像読取装置における前記搬送路の途中に設けられ且つ原稿の厚みに応じて前記搬送路から離れる方向に移動可能に設けられ、前記搬送路に沿って搬送される原稿の画像を読み取る画像読取手段を有する画像読取ユニットと、
前記画像読取手段で読み取った原稿の画像データに所定の処理を施す画像処理手段とを備え、
前記画像処理手段は、原稿の先端が前記画像読取ユニットの手前に位置するタイミングで読み取った第1領域と、前記画像読取ユニットの端部に原稿が接触して前記画像読取ユニットが前記搬送路から離れる方向に移動しながら前記画像読取手段の読取位置に原稿が到達するまでの間に読み取った第2領域と、前記画像読取手段の読取位置に原稿が対向する間に読み取った第3領域とを有する画像データから、前記第2領域と前記第3領域との境界を原稿領域とそれ以外の背景領域との境界部分として検出する
ことを特徴とする画像読取システム。 - 前記画像処理手段は、原稿の画像データに含まれる原稿領域とそれ以外の背景領域との境界に基づいて原稿サイズ検出を行うことを特徴とする請求項1に記載の画像読取システム。
- 前記画像処理手段は、原稿の画像データに含まれる原稿領域とそれ以外の背景領域との濃度変化の微分情報に基づいて前記原稿領域と前記背景領域との境界座標を取得して原稿サイズ検知を行うことを特徴とする請求項2記載の画像読取システム。
- 前記画像処理手段は、前記原稿領域と前記背景領域との境界座標を取得して原稿サイズ検知を行うに際し、原稿の厚みに応じて濃度変化の微分閾値を変更することを特徴とする請求項3記載の画像読取システム。
- 前記画像処理手段は、原稿の画像データに含まれる原稿領域とそれ以外の背景領域との境界座標を取得して原稿サイズ検知を行うに際し、原稿の厚みに応じて原稿領域の外側に付与するマージン量を変更することを特徴とする請求項2記載の画像読取システム。
- 前記画像読取装置は、前記搬送手段と、前記画像読取手段と、第1原稿が導入される導入口と、前記第1原稿が排出される排出口とを備え、
前記搬送手段は、前記第1原稿を前記導入口から前記排出口へ搬送する一方、前記第1原稿よりも厚手の第2原稿の画像を前記画像読取手段によって読み取るために、前記排出口から導入される前記第2原稿を前記画像読取手段に向けて搬送することを特徴とする請求項1乃至5のいずれか1項に記載の画像読取システム。 - 前記第1原稿の画像を読み取った後に前記第2原稿の画像を読み取るに際し、
前記画像処理手段は、前記第1原稿を読み取った第1原稿画像に対応する所定の第1画像処理条件を、前記第2原稿を読み取った第2原稿画像に対応する所定の第2画像処理条件とすることを特徴とする請求項6記載の画像読取システム。 - 搬送路に沿って搬送される原稿の厚さに応じて前記搬送路から離れる方向に移動可能となる画像読取ユニット内の画像読取手段によって読み取った原稿の画像データから原稿サイズを検出する原稿サイズ検出手段を備え、前記原稿サイズ検出手段は、原稿の画像領域に対応する原稿領域と、前記原稿領域に続く第1濃度の第1背景領域と、前記第1背景領域に続く領域であって前記第1濃度と異なる第2濃度の第2背景領域とを含む画像データにおいて、前記原稿領域とこれに続く前記第1背景領域との境界部分を特定して原稿サイズを検出することを特徴とする原稿サイズ検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011217919A JP5848085B2 (ja) | 2011-09-30 | 2011-09-30 | 画像読取システムおよび原稿サイズ検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011217919A JP5848085B2 (ja) | 2011-09-30 | 2011-09-30 | 画像読取システムおよび原稿サイズ検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013078059A JP2013078059A (ja) | 2013-04-25 |
| JP2013078059A5 JP2013078059A5 (ja) | 2014-11-06 |
| JP5848085B2 true JP5848085B2 (ja) | 2016-01-27 |
Family
ID=48481205
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011217919A Active JP5848085B2 (ja) | 2011-09-30 | 2011-09-30 | 画像読取システムおよび原稿サイズ検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5848085B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019033413A (ja) * | 2017-08-09 | 2019-02-28 | 株式会社リコー | 読取装置及び画像形成装置 |
| JP7176424B2 (ja) * | 2019-01-30 | 2022-11-22 | 株式会社リコー | シート材読取装置および画像形成装置 |
| JP2021130555A (ja) * | 2020-02-20 | 2021-09-09 | 株式会社Pfu | 媒体搬送装置 |
| JP7524575B2 (ja) | 2020-03-30 | 2024-07-30 | セイコーエプソン株式会社 | 画像読取装置 |
| JP2021164015A (ja) * | 2020-03-31 | 2021-10-11 | コニカミノルタ株式会社 | 自動原稿搬送装置、画像読み取り装置および画像形成装置 |
| JP7571405B2 (ja) | 2020-07-22 | 2024-10-23 | セイコーエプソン株式会社 | 画像読取装置、エッジ検出プログラム、エッジ検出方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09240874A (ja) * | 1996-03-07 | 1997-09-16 | Nec Corp | 画像読み取り装置 |
| JP4311660B2 (ja) * | 2004-05-13 | 2009-08-12 | キヤノン電子株式会社 | 画像読取装置 |
| JP4379488B2 (ja) * | 2007-05-09 | 2009-12-09 | コニカミノルタビジネステクノロジーズ株式会社 | 画像読取装置 |
| JP5276284B2 (ja) * | 2007-06-29 | 2013-08-28 | キヤノン電子株式会社 | 画像読取装置、画像処理方法、および画像処理プログラム |
| JP5313565B2 (ja) * | 2008-07-02 | 2013-10-09 | キヤノン電子株式会社 | 画像読取装置、画像読取方法、画像読取システム及びプログラム |
| JP5221320B2 (ja) * | 2008-12-24 | 2013-06-26 | キヤノン電子株式会社 | 画像読取装置 |
-
2011
- 2011-09-30 JP JP2011217919A patent/JP5848085B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013078059A (ja) | 2013-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7196698B2 (ja) | 画像処理装置、画像処理方法、及び画像処理プログラム | |
| JP5848085B2 (ja) | 画像読取システムおよび原稿サイズ検出装置 | |
| US10988335B2 (en) | Transporting apparatus, program, and control method of transporting apparatus | |
| JP4844247B2 (ja) | 画像処理装置および画像処理プログラム | |
| JP7211238B2 (ja) | エッジ検出装置、傾き補正装置、読取装置、画像処理装置およびエッジ検出方法 | |
| JP4864653B2 (ja) | 画像読取装置、画像読取方法及び該方法を実行するためのプログラム | |
| US8427714B2 (en) | Image-reading device | |
| JP4678278B2 (ja) | 両面同時読取装置 | |
| CN101115115A (zh) | 图像处理装置和方法 | |
| JP3641935B2 (ja) | 原稿検出装置 | |
| JP7066424B2 (ja) | 画像読取装置 | |
| JP5313565B2 (ja) | 画像読取装置、画像読取方法、画像読取システム及びプログラム | |
| JP2012080313A (ja) | 画像読取装置、画像形成装置、画像読取装置の制御方法、および画像読取装置の制御プログラム | |
| JP4620272B2 (ja) | 画像読取り装置、方法、及びその方法を実施する制御装置、並びにプログラム及び記憶媒体 | |
| JP6135190B2 (ja) | 画像読取装置 | |
| JP2011171992A (ja) | 原稿読取装置及び画像形成装置 | |
| US7609399B2 (en) | Scanning apparatus that scans one job among a plurality based on image data on either side | |
| JP2008193553A (ja) | 原稿読取装置 | |
| JPH1169096A (ja) | 画像形成装置 | |
| JP7423246B2 (ja) | 原稿読取装置 | |
| JP2021100220A (ja) | 画像処理装置及び画像処理方法 | |
| JP2021044664A (ja) | 画像読取装置 | |
| JP5267108B2 (ja) | 画像処理装置 | |
| JP7243434B2 (ja) | 画像読取装置、画像読取方法およびプログラム | |
| JP6642833B2 (ja) | 画像処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140918 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140918 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20140918 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150612 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5848085 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |