JP5837629B2 - 容器搬送装置 - Google Patents
容器搬送装置 Download PDFInfo
- Publication number
- JP5837629B2 JP5837629B2 JP2014017527A JP2014017527A JP5837629B2 JP 5837629 B2 JP5837629 B2 JP 5837629B2 JP 2014017527 A JP2014017527 A JP 2014017527A JP 2014017527 A JP2014017527 A JP 2014017527A JP 5837629 B2 JP5837629 B2 JP 5837629B2
- Authority
- JP
- Japan
- Prior art keywords
- sprocket
- chain
- cam
- gripping
- container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 178
- 230000002093 peripheral effect Effects 0.000 claims description 18
- 238000003780 insertion Methods 0.000 claims description 10
- 230000037431 insertion Effects 0.000 claims description 10
- 238000007689 inspection Methods 0.000 description 3
- 239000000243 solution Substances 0.000 description 3
- 239000000126 substance Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000003708 ampul Substances 0.000 description 1
- 235000013361 beverage Nutrition 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 229940071643 prefilled syringe Drugs 0.000 description 1
Images








Landscapes
- Framework For Endless Conveyors (AREA)
- Chain Conveyers (AREA)
- Specific Conveyance Elements (AREA)
Description
図1は、本発明の実施の形態にかかる容器搬送装置1の概略構成を説明するための平面図である。図2は、図1に容器搬送装置1の概略構成を説明するための側面図である。図3は、図2に示す移動機構16およびガイド部17の構成を説明するための正面図である。図4は、図1のE部の拡大図である。なお、以下の説明では、図1〜図3に示すように、互いに直交する水平方向の2方向(X方向、Y方向)のうちのX方向を「左右方向」、Y方向を「前後方向」とする。また、X1方向側を「右」側、X2方向側を「左」側、Y1方向側を「前」側、Y2方向側を「後(後ろ)側」とする。
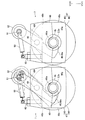
図5は、図3に示す把持機構7およびチェーン8の構成を説明するための正面図である。図6は、図5のF−F方向から把持機構7およびチェーン8の構成を説明するための側面図である。図7は、図5に示す把持機構7の構成を説明するための平面図である。図8は、図5のG−G方向からチェーン8等の構成を説明するための平面図である。図9(A)は、図2のH部の拡大図であり、図9(B)は、図3のJ部の拡大図である。
上述のように、受け渡し部D1では、容器搬送装置1とロボット3との間で複数のシリンジ2が一括で受け渡される。チェーン8は、受け渡し部D1で複数のシリンジ2が一括で受け渡されるときにも停止せずに移動している。受け渡し部D1で複数のシリンジ2が一括で受け渡される直前には、カム移動機構19は、後ろ側に退避しているカム18を前側に移動させて、カム18のカム面を複数の把持機構7のローラ52に接触させる。カム18のカム面が複数のローラ52に接触すると、複数の把持機構7のシリンジ2の受け取りが可能となるように、複数のレバー部材48が一括で回動する。
以上説明したように、本形態では、受け渡し部D1で複数のシリンジ2が一括で受け渡されるときに、移動機構16は、チェーン8の移動速度と同じ速度で、かつ、スプロケット9からスプロケット10に向かうときのチェーン8の移動方向と逆方向へ保持部材14を移動させるため、受け渡し部D1で複数のシリンジ2が一括で受け渡されるときに、チェーン8が移動していても、複数の把持機構7は、ロボット3に対して相対的に停止した状態となる。したがって、本形態では、ロボット3が左右方向へ移動するための機構を備えていなくても、チェーン8が移動している状態において複数のシリンジ2を一括で把持機構7に引き渡すことができる。その結果、本形態では、チェーン8が移動している状態において複数のシリンジ2を一括で受け渡すことが可能であっても、様々なロボット3と組み合わせて容器搬送装置1を使用することが可能になり、容器搬送装置1の汎用性を高めることが可能になる。
上述した形態では、容器搬送装置1は、シリンジ2の検査装置に供給されるシリンジ2を搬送するための装置であるが、容器搬送装置1は、シリンジ2の検査装置から排出されるシリンジ2を搬送するための装置であっても良い。この場合には、容器搬送装置1は、スターホイール4からシリンジ2を1本ずつ受け取って、ロボット3に複数のシリンジ2を一括で引き渡す。また、この場合には、受け渡し部D1で複数のシリンジ2が一括で受け渡される直前に、カム移動機構19の動力で前進するカム18のカム面が複数のローラ52に接触して、複数の把持機構7のシリンジ2の把持状態が解除される。また、上述した形態では、容器搬送装置1の前側にロボット3が配置されているが、複数のシリンジ2を一括で受け渡すことが可能なロボット3以外の装置が容器搬送装置1の前側に配置されても良い。
2 シリンジ(容器)
7 把持機構
8 チェーン
9 スプロケット(第1スプロケット)
10 スプロケット(第2スプロケット)
11 スプロケット(第3スプロケット)
12 スプロケット(第4スプロケット)
13 スプロケット(第5スプロケット)
14 保持部材
15 支持体
16 移動機構
18 カム
19 カム移動機構
45 第1搭載部材
45a 搭載面
46 第2搭載部材
46a 挿入孔
47 把持部本体
48 レバー部材
48a 把持部
49 支持軸
50 引張りコイルバネ(付勢部材)
52 ローラ(カムフォロア)
55 リンク
55d 第1貫通孔
55e 第2貫通孔
56 連結軸
57 ローラ(第1ローラ)
58 ローラ(第2ローラ)
61 固定用ピン
62 ボールプランジャ
64 ローラ(第3ローラ)
71、72 ガイド部材(第1ガイド部材、第2ガイド部材)
D1 受け渡し部
Claims (9)
- 容器を把持する複数の把持機構と、複数の前記把持機構を保持するチェーンと、前記チェーンの内周側から前記チェーンに係合する第1スプロケットおよび第2スプロケットと、前記第1スプロケットおよび前記第2スプロケットを回転可能に保持する保持部材と、前記第1スプロケットから前記第2スプロケットへ向かうときの前記チェーンの移動方向と平行な方向へ前記保持部材を往復移動させる移動機構とを備える容器搬送装置であって、
前記第1スプロケットから前記第2スプロケットに向かって前記チェーンが移動するときに前記把持機構が通過する部分の少なくとも一部は、複数の前記容器が一括で受け渡される受け渡し部となっており、
前記容器搬送装置は、さらに、前記受け渡し部で複数の前記容器が受け渡されるときに複数の前記把持機構の前記容器の把持状態を解除するまたは複数の前記把持機構の前記容器の受け取りを可能な状態にするためのカムと、前記第1スプロケットから前記第2スプロケットへ向かうときの前記チェーンの移動方向と上下方向とに直交する方向へ前記カムを往復移動させるカム移動機構とを備え、
前記把持機構は、前記容器の側面を抱えるように前記容器の側面に接触する把持部が一端側に形成されるレバー部材と、前記レバー部材を回動可能に支持する支持軸と、前記容器の側面に前記把持部が接触する方向へ前記レバー部材を付勢する付勢部材と、前記レバー部材の他端側に取り付けられるとともに前記カムのカム面に接触して前記容器の側面から前記把持部が離れる方向へ前記レバー部材を回動させるカムフォロアとを備え、
前記移動機構は、前記受け渡し部で複数の前記容器が受け渡されるときに、前記チェーンの移動速度と同じ速度で、かつ、前記第1スプロケットから前記第2スプロケットに向かうときの前記チェーンの移動方向と逆方向へ前記保持部材を移動させ、
前記カム移動機構は、前記受け渡し部で複数の前記容器が受け渡されるときに、前記カムの前記カム面が前記カムフォロアに接触する方向へ前記カムを移動させて、複数の前記把持機構の前記レバー部材を一括で回動させることを特徴とする容器搬送装置。 - 前記把持機構は、前記チェーンの上側に配置されていることを特徴とする請求項1記載の容器搬送装置。
- 前記チェーンは、順次連結される複数のリンクと、複数の前記リンクを連結するための連結軸と、上下方向における前記リンクの両側に配置され上下方向を回転の軸方向として回転するとともに前記リンクまたは前記連結軸に回転可能に保持される第1ローラと、前記チェーンの長手方向と上下方向とに直交する第1方向における前記リンクの両側に配置され前記第1方向を回転の軸方向として回転するとともに前記リンクまたは前記連結軸に回転可能に保持される第2ローラとを備え、
前記第1ローラと前記第2ローラとは、前記チェーンの長手方向において一定のピッチで、かつ、交互に配置され、
前記保持部材には、前記第1ローラおよび前記第2ローラを案内する第1ガイド部材が固定されていることを特徴とする請求項2記載の容器搬送装置。 - 前記チェーンは、順次連結される複数のリンクと、複数の前記リンクを連結するための連結軸とを備え、
前記チェーンの長手方向における前記リンクの一端側には、第1貫通孔が上下方向に貫通するように形成され、前記チェーンの長手方向における前記リンクの他端側には、第2貫通孔が上下方向に貫通するように形成され、
前記チェーンの長手方向で隣接する一方の前記リンクの前記第1貫通孔と他方の前記リンクの前記第2貫通孔とに前記連結軸が挿通され、
前記連結軸は、前記把持機構を構成する把持部本体の下面から下側へ突出するように前記把持部本体と一体で形成されていることを特徴とする請求項2または3記載の容器搬送装置。 - 前記チェーンは、上下方向における前記リンクの両側に配置され上下方向を回転の軸方向として回転する第1ローラを備え、
前記第1ローラは、前記連結軸に回転可能に保持され、
前記保持部材には、前記第1ローラを案内する第1ガイド部材が固定されていることを特徴とする請求項4記載の容器搬送装置。 - 前記把持機構は、前記チェーンの長手方向における前記連結軸の両側に配置され上下方向を回転の軸方向として回転するとともに前記把持部本体に回転可能に保持される第3ローラを備え、
前記保持部材には、前記第3ローラを案内する第2ガイド部材が固定されていることを特徴とする請求項4または5記載の容器搬送装置。 - 前記把持機構は、前記容器が搭載される搭載面が形成される第1搭載部材と、前記チェーンに保持されるとともに前記第1搭載部材が搭載されて固定される第2搭載部材とを有する把持部本体を備え、
前記第1搭載部材には、下側へ突出する固定用ピンが固定され、
前記第2搭載部材には、前記固定用ピンが挿入される挿入孔が形成されるとともに、前記挿入孔に挿入された前記固定用ピンを固定するためのボールプランジャが取り付けられていることを特徴とする請求項2から6のいずれかに記載の容器搬送装置。 - 前記保持部材を移動可能に支持する支持体と、前記支持体に回転可能に保持され前記チェーンの内周側から前記チェーンに係合する第3スプロケットと、前記支持体に回転可能に保持され前記チェーンの外周側から前記チェーンに係合する第4スプロケットおよび第5スプロケットとを備え、
前記チェーンは、上側から見たときに略T形状となるように、かつ、前記第1スプロケットで180°に折り返されて前記第2スプロケットへ向かい、前記第2スプロケットで180°に折り返されて前記第4スプロケットに向かい、前記第4スプロケットで90°に折り曲げられて前記第3スプロケットに向かい、前記第3スプロケットで180°に折り返されて前記第5スプロケットに向かい、前記第5スプロケットで90°に折り曲げられて前記第1スプロケットに向かうように、前記第1スプロケット、前記第2スプロケット、前記第3スプロケット、前記第4スプロケットおよび前記第5スプロケットに架け渡されており、
前記第3スプロケットに前記チェーンを駆動するための動力が入力されることを特徴とする請求項1から7のいずれかに記載の容器搬送装置。 - 容器を把持する複数の把持機構と、複数の前記把持機構を保持するベルトと、前記ベルトの内周側から前記ベルトに係合する第1プーリおよび第2プーリと、前記第1プーリおよび前記第2プーリを回転可能に保持する保持部材と、前記第1プーリから前記第2プーリへ向かうときの前記ベルトの移動方向と平行な方向へ前記保持部材を往復移動させる移動機構とを備える容器搬送装置であって、
前記第1プーリから前記第2プーリに向かって前記ベルトが移動するときに前記把持機構が通過する部分の少なくとも一部は、複数の前記容器が一括で受け渡される受け渡し部となっており、
前記容器搬送装置は、さらに、前記受け渡し部で複数の前記容器が受け渡されるときに複数の前記把持機構の前記容器の把持状態を解除するまたは複数の前記把持機構の前記容器の受け取りを可能な状態にするためのカムと、前記第1プーリから前記第2プーリへ向かうときの前記ベルトの移動方向と上下方向とに直交する方向へ前記カムを往復移動させるカム移動機構とを備え、
前記把持機構は、前記容器の側面を抱えるように前記容器の側面に接触する把持部が一端側に形成されるレバー部材と、前記レバー部材を回動可能に支持する支持軸と、前記容器の側面に前記把持部が接触する方向へ前記レバー部材を付勢する付勢部材と、前記レバー部材の他端側に取り付けられるとともに前記カムのカム面に接触して前記容器の側面から前記把持部が離れる方向へ前記レバー部材を回動させるカムフォロアとを備え、
前記移動機構は、前記受け渡し部で複数の前記容器が受け渡されるときに、前記ベルトの移動速度と同じ速度で、かつ、前記第1プーリから前記第2プーリに向かうときの前記ベルトの移動方向と逆方向へ前記保持部材を移動させ、
前記カム移動機構は、前記受け渡し部で複数の前記容器が受け渡されるときに、前記カムの前記カム面が前記カムフォロアに接触する方向へ前記カムを移動させて、複数の前記把持機構の前記レバー部材を一括で回動させることを特徴とする容器搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014017527A JP5837629B2 (ja) | 2014-01-31 | 2014-01-31 | 容器搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014017527A JP5837629B2 (ja) | 2014-01-31 | 2014-01-31 | 容器搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015143152A JP2015143152A (ja) | 2015-08-06 |
| JP5837629B2 true JP5837629B2 (ja) | 2015-12-24 |
Family
ID=53888504
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014017527A Active JP5837629B2 (ja) | 2014-01-31 | 2014-01-31 | 容器搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5837629B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017127322A1 (de) * | 2017-11-20 | 2019-05-23 | Khs Gmbh | Vorrichtung und Verfahren zum gruppenweisen Zuführen von Behälter an eine getaktete Behandlungsmaschine |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58212516A (ja) * | 1982-06-01 | 1983-12-10 | Ckd Corp | 物品の集積移送装置 |
| JPS60125031U (ja) * | 1984-02-01 | 1985-08-23 | 信英通信工業株式会社 | ワ−ク自動搬送機構 |
| JPS6342606U (ja) * | 1986-09-08 | 1988-03-22 | ||
| JP2892530B2 (ja) * | 1991-08-05 | 1999-05-17 | 花王株式会社 | 物品の排出位置制御方法 |
| JP2011195241A (ja) * | 2010-03-18 | 2011-10-06 | Gunze Ltd | 検査用搬送装置 |
-
2014
- 2014-01-31 JP JP2014017527A patent/JP5837629B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015143152A (ja) | 2015-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106346458B (zh) | 工业用机器人 | |
| HK1128009A1 (en) | Unit for applying opening devices to packages of pourable food products | |
| EP2239215A2 (en) | Article carrier apparatus | |
| JP2007511445A (ja) | 可動グリッパを持ったコンベヤおよび関連するコンベヤリンク | |
| KR870000929B1 (ko) | 슬라이드 파스너용 검사장치 | |
| US20060070850A1 (en) | Shuttle conveyor | |
| JP5837629B2 (ja) | 容器搬送装置 | |
| CN108216759B (zh) | 容器搬运装置 | |
| JP5992889B2 (ja) | 搬送システム及び作業システム | |
| JP4951767B2 (ja) | 飲料用容器保持装置及び該保持装置を用いた飲料容器受け渡し搬送装置 | |
| TW201636284A (zh) | 用於處理物品之翻轉裝置,系統及方法 | |
| JP2019529287A (ja) | スピンドル駆動部を有する容器グリッパを備えた搬送装置 | |
| KR20140029769A (ko) | 벨트 컨베이어 장치 | |
| CN108349618A (zh) | 用于给各包装贴标签的装置和方法 | |
| JP2012144256A (ja) | 搬送装置 | |
| JP2008081189A (ja) | 容器処理装置 | |
| TW201718376A (zh) | 晶片移載裝置及晶片拾取機 | |
| US10011433B2 (en) | Workpiece conveyor system | |
| KR102350225B1 (ko) | 트레이 공급 장치 | |
| JP2013039943A (ja) | 容器搬送装置 | |
| RU2013128979A (ru) | Устройство, его способ работы и инструменты для использования с устройством | |
| JP2016528114A5 (ja) | ||
| JP5296180B2 (ja) | ワーク搬送装置 | |
| JPH0637228B2 (ja) | ライン式キャッパ | |
| JP5292562B2 (ja) | 容器搬送装置及びこの搬送装置を備えた容器検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150519 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20151023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151105 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5837629 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |