JP5779534B2 - インクジェット記録装置及び印字制御方法 - Google Patents
インクジェット記録装置及び印字制御方法 Download PDFInfo
- Publication number
- JP5779534B2 JP5779534B2 JP2012078876A JP2012078876A JP5779534B2 JP 5779534 B2 JP5779534 B2 JP 5779534B2 JP 2012078876 A JP2012078876 A JP 2012078876A JP 2012078876 A JP2012078876 A JP 2012078876A JP 5779534 B2 JP5779534 B2 JP 5779534B2
- Authority
- JP
- Japan
- Prior art keywords
- printing
- moving speed
- line clock
- clock signal
- recording apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04573—Timing; Delays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/07—Ink jet characterised by jet control
- B41J2/105—Ink jet characterised by jet control for binary-valued deflection
Landscapes
- Ink Jet (AREA)
- Particle Formation And Scattering Control In Inkjet Printers (AREA)
Description
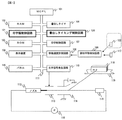
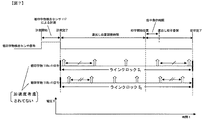
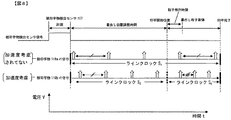
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、インクジェット記録装置において、「印字対象物に印字をするためのインクを収容するインク容器と、前記インク容器に接続され、インクを吐出するノズルと、前記ノズルから吐出されて印字に使用されるインクを帯電する帯電電極と、前記帯電電極で帯電されたインクを偏向する偏向電極と、印字に使用されないインクを回収するガターと、を備え、第1のラインクロック信号を生成する書出しタイミング制御回路と、第2のラインクロック信号を生成する印字幅制御回路と、制御部と、を有し、前記制御部で、第1のラインクロック信号に基づいて被印字物への書出し開始位置を制御し、被印字物が印字開始タイミングに達した際に、第2のラインクロック信号に基づいて印字内容の文字列の幅調整を行い、印字制御すること」を特徴とする。
印字内容は、印字内容データをパネル105によって入力してRAM102に保存することで設定することが出来る。また、パネル105より設定された印字文字列の幅から縦列間の距離(ラインクロック信号1パルスあたりの移動距離)を決定し、RAM102に保存する。
まず、印字内容及び印字条件を設定し(S1)、設定された値から最高印字速度を算出する(S2)。そして後述する方法で被印字物の第1の移動速度V1と第2の移動速度V2を算出し(S3、S4)、この第1及び第2の移動速度に基づいて平均移動速度V12と加速度aを求める(S5)。これより、平均移動速度V12と最高印字速度との比から第1のラインクロック信号を生成し(S6)、第1のラインクロック信号に基づいて上述のラインクロックパルス数を算出し、パルスをカウントするタイマの設定値とする(S7)。
102・・・RAM
103・・・ROM
104・・・表示装置
105・・・パネル
106・・・書出しタイマ
107・・・印字制御装置
108・・・被印字物検知回路
109・・・移動速度計測回路
110・・・文字信号発生回路
111・・・バスライン
112・・・ノズル
113・・・帯電電極
114・・・偏向電極
115・・・ガター
116・・・ポンプ
117、122・・・被印字物検出センサ
118・・・被印字物
119・・・コンベア
120・・・書出しタイミング制御回路
121・・・印字幅制御回路
201・・・信号発生装置
202・・・入力回路
203・・・分周回路
Claims (9)
- 印字対象物に印字をするためのインクを収容するインク容器と、
前記インク容器に接続され、インクを吐出するノズルと、
前記ノズルから吐出されて印字に使用されるインクを帯電する帯電電極と、
前記帯電電極で帯電されたインクを偏向する偏向電極と、
印字に使用されないインクを回収するガターと、を備えたインクジェット記録装置であって、
第1のラインクロック信号を生成する書出しタイミング制御回路と、
第2のラインクロック信号を生成する印字幅制御回路と、
制御部と、
被印字物の基準位置での通過時間を検出する検出部と、
被印字物の移動速度を算出する移動速度計測回路と、を有し、
前記制御部で、第1のラインクロック信号に基づいて被印字物への書出し開始位置を制御し、
被印字物が印字開始タイミングに達した際に、第2のラインクロック信号に基づいて印字内容の文字列の幅調整を行い、印字制御し、
前記検出部で得られる検出情報に基づいて前記移動速度計測回路で被印字物の第1の地点での移動速度と、第2の地点での移動速度を算出するとともに、前記第1及び第2の移動速度から平均移動速度を算出し、
前記平均移動速度と、設定された情報に基づく被印字物の最高移動速度との比に基づいて前記書出しタイミング制御回路で第1のラインクロック信号を生成し、
前記移動速度計測回路で被印字物の前記第1の地点での移動速度と、前記第2の地点での移動速度と、被印字物が前記第1と第2の地点間を通過する時間に基づいて被印字物の加速度を算出し、前記加速度に基づいて印字開始タイミングでの移動速度を算出し、前記印字開始タイミングでの移動速度と、設定された情報に基づく被印字物の最高移動速度との比に基づいて前記印字幅制御回路で第2のラインクロック信号を生成することを特徴とするインクジェット記録装置。 - 請求項1に記載のインクジェット記録装置であって、
前記移動速度計測回路で、
第1の被印字物の第1の地点での移動速度と、第2の被印字物の第1の地点での移動速度と、被印字物が前記第1と第2の地点間を通過する時間とに基づいて第2の被印字物の加速度を算出し、
前記加速度に基づいて、前記第2の被印字物の印字開始タイミングでの移動速度を求め、前記第2の被印字物の印字開始タイミングでの移動速度と、設定された情報に基づく第2の被印字物の最高移動速度との比に基づいて第2のラインクロック信号を生成し、
前記第2の被印字物の第1の地点での移動速度と、第2の地点での移動速度とから平均移動速度を算出し、
前記平均移動速度と、設定された情報に基づく被印字物の最高移動速度との比に基づいて第1のラインクロック信号を生成し、
前記第1のラインクロック信号と前記第2のラインクロック信号に基づいて前記第2の被印字物の印字制御を行うことを特徴とするインクジェット記録装置。 - 請求項1に記載のインクジェット記録装置であって、
パルス数をカウントするタイマを有し、
前記制御部で、検出部の位置から印字開始時までに被印字物が移動する距離を前記第1のラインクロック信号の1パルスあたりの移動距離で除算し、ラインクロックパルス数を算出し、
前記書出しタイマでパルス数をカウントし、カウント値が前記ラインクロックパルス数に達した際に、前記制御部で印字を開始することを特徴とするインクジェット記録装置。 - 請求項1に記載のインクジェット記録装置であって、
前記検出部は、被印字物を検知し、被印字物の通過時間を検出するセンサであることを特徴とするインクジェット記録装置。 - 請求項1に記載のインクジェット記録装置であって、
前記検出部は被印字物の移動量によって信号を発生するエンコーダであることを特徴とするインクジェット記録装置。 - 印字対象物に印字をするためのインクを収容するインク容器と、
前記インク容器に接続され、インクを吐出するノズルと、
前記ノズルから吐出されて印字に使用されるインクを帯電する帯電電極と、
前記帯電電極で帯電されたインクを偏向する偏向電極と、
印字に使用されないインクを回収するガターと、
制御部と、
を備えたインクジェット記録装置の印字制御方法であって、
被印字物の移動速度に基づいて第1のラインクロック信号と第2のラインクロック信号を生成し、
前記第1のラインクロック信号に基づいて被印字物への書出し開始位置を制御し、
被印字物が印字開始タイミングに達した際に、第2のラインクロック信号に基づいて印字内容の文字列の幅調整を行い、印字制御し、
検出手段で被印字物の基準位置での通過時間を検出し、
被印字物の通過時間と設定された被印字物の長さとから被印字物の移動速度を算出し、
被印字物の第1の地点での移動速度と、第2の地点での移動速度とから平均移動速度を算出し、
前記平均移動速度と、設定された情報に基づく被印字物の最高移動速度との比に基づいて第1のラインクロック信号を生成し、
被印字物の前記第1の地点での移動速度と、前記第2の地点での移動速度と、被印字物が前記第1と第2の地点間を通過する時間に基づいて被印字物の加速度を算出し、
前記加速度に基づいて印字開始タイミングでの移動速度を算出し、
前記印字開始タイミングでの移動速度と、設定された情報に基づく被印字物の最高移動速度との比に基づいて第2のラインクロック信号を生成することを特徴とするインクジェット記録装置の印字制御方法。 - 請求項6に記載のインクジェット記録装置の印字制御方法であって、
検出手段を複数有し、複数の検出手段の検出情報に基づいて、第1、第2の地点での被印字物の移動速度を算出し、
前記第1、第2の移動速度と、被印字物が前記第1と第2の地点間を通過する時間に基づいて被印字物の加速度を算出することを特徴とするインクジェット記録装置の印字制御方法。 - 請求項6に記載のインクジェット記録装置の印字制御方法であって、
第1の被印字物の第1の地点での移動速度と、第2の被印字物の第1の地点での移動速度と、被印字物が前記第1と第2の地点間を通過する時間とに基づいて第2の被印字物の加速度を算出し、
前記加速度に基づいて、前記第2の被印字物の印字開始タイミングでの移動速度を求め、前記第2の被印字物の印字開始タイミングでの移動速度と、設定された情報に基づく第2の被印字物の最高移動速度との比に基づいて第2のラインクロック信号を生成し、
前記第2の被印字物の第1の地点での移動速度と、第2の地点での移動速度とから平均移動速度を算出し、
前記平均移動速度と、設定された情報に基づく被印字物の最高移動速度との比に基づいて第1のラインクロック信号を生成することを特徴とするインクジェット記録装置の印字制御方法。 - 請求項6に記載のインクジェット記録装置の印字制御方法であって、
検出手段で被印字物を検出した時から印字開始時までに被印字物が移動する距離を、前記第1のラインクロック信号の1パルスあたりの移動距離で除算して、ラインクロックパルス数を算出し、
パルスカウント手段でラインクロックパルス数をカウントし、カウント値が前記ラインクロックパルス数に達した際に、印字開始することを特徴とするインクジェット記録装置の印字制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012078876A JP5779534B2 (ja) | 2012-03-30 | 2012-03-30 | インクジェット記録装置及び印字制御方法 |
| EP13154941.2A EP2644384B1 (en) | 2012-03-30 | 2013-02-12 | Ink-jet recording apparatus and printing control method |
| ES13154941.2T ES2549147T3 (es) | 2012-03-30 | 2013-02-12 | Aparato registrador de inyección de tinta y método de control de impresión |
| US13/766,500 US8974029B2 (en) | 2012-03-30 | 2013-02-13 | Ink-jet recording apparatus and printing control method |
| CN201310058734.0A CN103358701B (zh) | 2012-03-30 | 2013-02-25 | 喷墨记录装置和打印控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012078876A JP5779534B2 (ja) | 2012-03-30 | 2012-03-30 | インクジェット記録装置及び印字制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013208727A JP2013208727A (ja) | 2013-10-10 |
| JP5779534B2 true JP5779534B2 (ja) | 2015-09-16 |
Family
ID=47683623
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012078876A Active JP5779534B2 (ja) | 2012-03-30 | 2012-03-30 | インクジェット記録装置及び印字制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8974029B2 (ja) |
| EP (1) | EP2644384B1 (ja) |
| JP (1) | JP5779534B2 (ja) |
| CN (1) | CN103358701B (ja) |
| ES (1) | ES2549147T3 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6058938B2 (ja) * | 2012-07-30 | 2017-01-11 | 株式会社日立産機システム | インクジェット記録装置及び印字制御方法 |
| CN103761807B (zh) * | 2013-12-27 | 2016-02-17 | 广东金赋信息科技有限公司 | 一种票据防错装置和系统 |
| EP3088190B1 (en) | 2015-04-28 | 2020-03-11 | HP Scitex Ltd | Print unit activation by means of a clock unit |
| EP3501831B1 (en) * | 2016-08-22 | 2022-08-17 | Hitachi Industrial Equipment Systems Co., Ltd. | Inkjet recording device and inkjet recording device control method |
| GB2554926A (en) * | 2016-10-14 | 2018-04-18 | Domino Uk Ltd | Improvements in or relating to continuous printers |
| CN109514997B (zh) * | 2019-01-22 | 2024-02-20 | 莱芜钢铁集团有限公司 | 一种隔膜泵动作频率调整方法、系统及控制器 |
| PL4206896T3 (pl) * | 2019-02-06 | 2024-10-28 | Hewlett-Packard Development Company L.P. | Identyfikacja bitów losowych w pakietach danych sterujących |
| WO2020162889A1 (en) | 2019-02-06 | 2020-08-13 | Hewlett-Packard Development Company, L.P. | Print component with memory array using intermittent clock signal |
| SG11202107305QA (en) | 2019-02-06 | 2021-08-30 | Hewlett Packard Development Co Lp | Integrated circuit with address drivers for fluidic die |
| JP7429180B2 (ja) * | 2020-10-15 | 2024-02-07 | 株式会社日立産機システム | インクジェット記録装置およびインクジェット記録装置の制御方法 |
| CN112776492B (zh) * | 2020-12-31 | 2022-11-08 | 苏州工业园区鑫海胜电子有限公司 | 一种无物理光栅的打印方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5763272A (en) * | 1980-10-04 | 1982-04-16 | Ricoh Co Ltd | Character height adjusting method in charge deflection type ink jet recording apparatus |
| JPH01168457A (ja) * | 1987-12-25 | 1989-07-03 | Hitachi Ltd | インクジエツト記録装置の印字制御装置 |
| JPH06305125A (ja) | 1993-04-22 | 1994-11-01 | Hitachi Ltd | インクジェット記録装置 |
| JP2000289253A (ja) * | 1999-04-08 | 2000-10-17 | Canon Inc | 記録装置および記録方法 |
| EP1700700B1 (en) | 2005-03-11 | 2012-06-13 | Hitachi Industrial Equipment Systems Co., Ltd. | Inkjet recording apparatus |
| JP2008114471A (ja) * | 2006-11-06 | 2008-05-22 | Hitachi Industrial Equipment Systems Co Ltd | インクジェット印字装置 |
| WO2010150370A1 (ja) * | 2009-06-24 | 2010-12-29 | 株式会社日立産機システム | インクジェット記録装置 |
-
2012
- 2012-03-30 JP JP2012078876A patent/JP5779534B2/ja active Active
-
2013
- 2013-02-12 ES ES13154941.2T patent/ES2549147T3/es active Active
- 2013-02-12 EP EP13154941.2A patent/EP2644384B1/en active Active
- 2013-02-13 US US13/766,500 patent/US8974029B2/en active Active
- 2013-02-25 CN CN201310058734.0A patent/CN103358701B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2644384B1 (en) | 2015-08-12 |
| US20130257949A1 (en) | 2013-10-03 |
| CN103358701B (zh) | 2015-06-24 |
| ES2549147T3 (es) | 2015-10-23 |
| CN103358701A (zh) | 2013-10-23 |
| EP2644384A1 (en) | 2013-10-02 |
| JP2013208727A (ja) | 2013-10-10 |
| US8974029B2 (en) | 2015-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5779534B2 (ja) | インクジェット記録装置及び印字制御方法 | |
| CN101610908B (zh) | 喷墨记录装置 | |
| CN104520108B (zh) | 喷墨记录装置和打印控制方法 | |
| US10500843B2 (en) | Ink jet recording apparatus | |
| JP5277313B2 (ja) | インクジェット記録装置 | |
| JP5743802B2 (ja) | インクジェット記録装置 | |
| US9636911B2 (en) | Inkjet recording device | |
| JP2016150502A (ja) | 液体吐出装置及び液体吐出方法 | |
| JP6169918B2 (ja) | インクジェット記録装置 | |
| JP6022391B2 (ja) | インクジェット記録装置 | |
| JP7429180B2 (ja) | インクジェット記録装置およびインクジェット記録装置の制御方法 | |
| JP2016150539A (ja) | インクジェット記録装置 | |
| CN104070786A (zh) | 喷墨记录系统 | |
| JP2015024654A (ja) | 記録装置および記録タイミング制御方法 | |
| JP5919159B2 (ja) | インクジェット記録装置 | |
| JP7199109B1 (ja) | インクジェットプリンタにおける印字歪の修正方法 | |
| JP2012035602A (ja) | 記録装置、記録システム、および記録モジュール | |
| JP7058157B6 (ja) | インクジェット記録装置 | |
| JPH1120172A (ja) | インク噴出印字装置 | |
| JPS63154360A (ja) | インクジエツト記録装置 | |
| JP2007044948A (ja) | インクジェット記録装置 | |
| JP2006150657A (ja) | インクジェット印刷装置 | |
| JP2016159435A (ja) | 液体吐出装置及び液体吐出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140604 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150616 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150713 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5779534 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |