JP5752910B2 - 内視鏡装置及びその動作制御方法 - Google Patents
内視鏡装置及びその動作制御方法 Download PDFInfo
- Publication number
- JP5752910B2 JP5752910B2 JP2010222840A JP2010222840A JP5752910B2 JP 5752910 B2 JP5752910 B2 JP 5752910B2 JP 2010222840 A JP2010222840 A JP 2010222840A JP 2010222840 A JP2010222840 A JP 2010222840A JP 5752910 B2 JP5752910 B2 JP 5752910B2
- Authority
- JP
- Japan
- Prior art keywords
- electric energy
- unit
- reflected
- endoscope apparatus
- ultrasonic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 12
- 238000001514 detection method Methods 0.000 claims description 24
- 238000010897 surface acoustic wave method Methods 0.000 claims description 11
- 230000007423 decrease Effects 0.000 claims description 5
- 239000000284 extract Substances 0.000 claims description 3
- 239000011521 glass Substances 0.000 claims 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 25
- 238000003384 imaging method Methods 0.000 description 23
- 238000005286 illumination Methods 0.000 description 22
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 20
- 239000003990 capacitor Substances 0.000 description 18
- 238000003780 insertion Methods 0.000 description 14
- 230000037431 insertion Effects 0.000 description 14
- 238000005452 bending Methods 0.000 description 9
- 239000006059 cover glass Substances 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 7
- 230000008878 coupling Effects 0.000 description 6
- 238000010168 coupling process Methods 0.000 description 6
- 238000005859 coupling reaction Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 239000002184 metal Substances 0.000 description 4
- 239000013307 optical fiber Substances 0.000 description 4
- 230000001902 propagating effect Effects 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 238000012544 monitoring process Methods 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 230000001808 coupling effect Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 210000003097 mucus Anatomy 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/12—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with cooling or rinsing arrangements
- A61B1/126—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with cooling or rinsing arrangements provided with means for cleaning in-use
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2423—Optical details of the distal end
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2476—Non-optical details, e.g. housings, mountings, supports
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2476—Non-optical details, e.g. housings, mountings, supports
- G02B23/2484—Arrangements in relation to a camera or imaging device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/07—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements using light-conductive means, e.g. optical fibres
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Surgery (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Pathology (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Veterinary Medicine (AREA)
- Radiology & Medical Imaging (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- Multimedia (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Description
このため、圧電振動子に大電力を供給するための経路上に不測の不具合、例えば断線、短絡、圧電振動子の損傷等が発生した場合や表面波の発生効率や伝送効率が低下した場合であっても、ユーザの操作若しくは装置の設定値に応じた電力量をそのまま供給し続けるために、必ずしも圧電振動子を適切に駆動できるわけでない。
図1は内視鏡装置の全体構成図を示す。この内視鏡装置は、内視鏡1と、光源装置5と、ビデオプロセッサ6と、モニタ7とを有する。内視鏡1は、例えば体腔内等の被検体の画像を撮像する機能を備える。光源装置5は、内視鏡1により被検体の画像を撮像するための照明光を内視鏡1に入射する。ビデオプロセッサ6は、内視鏡1から伝送されてきた画像信号に対して所定の画像処理を行い、この画像信号に対応する観察画像を構築する。モニタ7は、ビデオプロセッサ6によって構築された観察画像を表示する。
挿入部3は、チューブ8と、湾曲部9と、先端部10とから成る。チューブ8は、可撓性を有する。湾曲部9は、チューブ8の先端側に設けられている。先端部10は、円筒形状に形成され、湾曲部9の先端側に設けられている。この先端部10には、例えば体腔内等の部位を撮像するための撮像素子11が内蔵されている。
ビデオプロセッサ6は、撮像素子11から伝送されてきた画像信号を処理し、撮像素子11により撮像された部位の観察画像信号を生成し、この観察画像をモニタ7の表示画面7aに表示する。
送水ノズル16は、送水を行って例えば被検体等の患部の血液、粘液等を洗浄する。
図3に示すように先端部10中には、先端硬質部18が設けられている。この先端硬質部18には、撮像ユニット17とライトガイドユニット22とを先端部10の内部に配設するための空間が形成されている。撮像ユニット17は、観察窓13に対向して設けられている。ライトガイドユニット22は、照明用レンズ22aに対向して設けられている。この照明用レンズ22aは、3つの照明窓14a、14b、14cに対応して設けられている。
撮像ユニット17の先端には、透明部材13aが設けられている。撮像ユニット17は、透明部材13aが先端部10の観察窓13に配置されるように、先端硬質部18に挿入されて固定される。
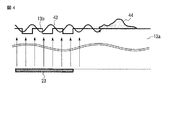
この圧電振動子23により発生された超音波振動は、図4に示すように主として当該圧電振動子23の貼着面に垂直な方向に伝播し、当該圧電振動子23に対向して設けられた回折格子13bに入射する。この回折格子13bに入射した超音波振動は、回折格子13bにより透明部材13aの外表面を伝播する弾性表面波43に変換される。この弾性表面波43は、透明部材13a上に付着している汚れ等44に到達すると、この汚れ等44を除去する。
λ=v/f
から算出される。
なお、上記図1乃至図3はそれぞれ説明しやすいように概略的に示しており、これら図上における寸法比は無視している。
検出部28は、圧電振動子23に供給した交流電力のうち圧電振動子23と通電ケーブル50とを含む供給系から反射された電気エネルギーとしての反射電力を当該反射電力に応じた直流電力として抽出する。
制御機能は、判定機能による判定の結果、反射電力が閾値以上であると判定すると、圧電振動子23又は通電ケーブル50のいずれか一方又は両方に予期しない事態が発生したとして信号発生部27からの交流電力の出力を停止する。
制御部31は、判定部29の判定結果に基づいて信号発生部27から出力される交流電力量を増減して制御する。又、制御部31は、判定部29により交流の平均電力に応じた電圧値が閾値以上であると判定すると、圧電振動子23又は通電ケーブル50のいずれか一方又は両方に予期しない事態、例えば通電ケーブル50のオープン、ショート等が発生したとして信号発生部27からの交流電力の出力を停止する。
制御部31は、信号発生部27からの交流電力の出力を停止すると、当該信号発生部27からの交流電力の出力停止の旨をモニタ7に表示する。
制御部31は、少なくとも判定部29の判定結果、例えば信号発生部27から出力される交流電力量の増減の量、信号発生部27からの交流電力の出力の停止の履歴を記憶部30に記録する。
制御部31は、ステップS1において、信号発生部27に交流電力の出力指令を出力する。信号発生部27は、制御部31からの出力指令を受けて、圧電振動子23を駆動して超音波振動を発生するための交流電力を圧電振動子23に供給する。この信号発生部27は、交流電力を発生する。
この制御部31は、ステップS3において、圧電振動子23を適切に駆動するための交流電力が圧電振動子23に供給されているという正常な旨をモニタ7に表示する。又、判定部29は、交流の平均電力に応じた電圧値に対応した電力情報を制御部31に送る。この制御部31は、判定部29からの電力情報に応じて信号発生部27から出力される交流電力量を増減して制御する。
この制御部31は、ステップS2からステップS6に移り、信号発生部27からの交流電力の出力を停止する。
制御部31は、ステップS7において、信号発生部27からの交流電力の出力を停止した異常の旨をモニタ7に表示する。
この制御部31は、ステップS2からステップS6に移り、信号発生部27からの交流電力の出力を停止する。
制御部31は、ステップS7において、信号発生部27からの交流電力の出力を停止した異常の旨をモニタ7に表示する。
例えば、本装置のように圧電振動子23と当該圧電振動子23に交流電力を供給する通電ケーブル50とから反射された反射電力を検出し、この反射電力に基づいて圧電振動子23を適切に駆動するための交流電力が圧電振動子23に供給されているか否かを判定し、この判定結果に基づいて信号発生部27から出力される交流電力を制御することは、本装置の電源投入後で、かつ本装置の挿入部3を例えば体腔内等の被検体内に挿入して使用する前に行うようにしてもよい。
Claims (13)
- 先端部に設けられた透明部材と、
前記透明部材に設けられ、超音波振動を発生する超音波振動子と、
前記超音波振動子を駆動して前記超音波振動を発生するための電気エネルギーを供給する電気エネルギー発生部と、
前記透明部材に設けられ、前記超音波振動素子により発生した前記超音波振動を前記透明部材に与えて当該透明部材の表面を伝播する弾性表面波に変換する回折格子と、
前記超音波振動子に供給した前記電気エネルギーのうち前記超音波振動子と前記超音波振動子に前記電気エネルギーを供給する経路とを含む供給系から反射された反射電気エネルギーを検出する検出部と、
前記検出部により検出された前記反射電気エネルギーに基づいて前記超音波振動子を適切に駆動するための前記電気エネルギーが前記超音波振動子に供給されているか否かを判定する判定部と、
前記判定部の判定結果に基づいて前記電気エネルギー発生部から出力される前記電気エネルギーを制御する制御部と、
を具備することを特徴とする内視鏡装置。 - 前記制御部は、前記判定部の判定結果に基づいて前記電気エネルギー発生部からの前記電気エネルギーの出力を停止、又は前記電気エネルギー発生部から出力される前記電気エネルギー値を増減させることを特徴とする請求項1記載の内視鏡装置。
- 前記判定部は、前記検出部により検出された前記反射電気エネルギー値と予め設定された閾値とを比較し、
前記制御部は、前記判定部の比較結果に応じて前記電気エネルギー発生部から出力される前記電気エネルギー値を増減させることを特徴とする請求項2記載の内視鏡装置。 - 前記判定部は、前記検出部により検出された前記反射電気エネルギー値と予め設定された閾値とを比較し、
前記制御部は、前記判定部の比較結果、前記反射電気エネルギーが前記閾値以上であれば、前記電気エネルギー発生部からの前記電気エネルギーの出力を停止する、
ことを特徴とする請求項2記載の内視鏡装置。 - モニタを有し、
前記制御部は、前記電気エネルギー発生部からの前記電気エネルギーの出力停止の旨を前記モニタに表示することを特徴とする請求項4記載の内視鏡装置。 - 前記制御部は、少なくとも前記判定部の判定結果の履歴を記憶部に記録することを特徴とする請求項1記載の内視鏡装置。
- 前記超音波振動子は、圧電振動子を含むことを特徴とする請求項1記載の内視鏡装置。
- 前記電気エネルギーは、電力であることを特微とする請求項1記載の内視鏡装置。
- 前記透明部材は、ガラス部材により形成されることを特徴とする請求項1記載の内視鏡装置。
- 前記電気エネルギー発生部により発生した前記電気エネルギーを前記超音波振動子に送ると共に、前記超音波振動子からの前記反射電気エネルギーを送る前記経路としてのケーブルを有し、
前記判定部は、前記検出部により検出された前記反射電気エネルギー値と予め設定された閾値とを比較し、
前記制御部は、前記判定部により前記反射電気エネルギー値が前記閾値以上であると判定すると、前記超音波振動子又は前記ケーブルのいずれか一方又は両方に予期しない事態が発生したとして前記電気エネルギー発生部からの前記電気エネルギーの出力を停止する、
ことを特徴とする請求項1記載の内視鏡装置。 - 前記検出部は、前記電気エネルギー発生部と前記ケーブルとの間に接続され、前記電気エネルギー発生部により発生した前記電気エネルギーを前記ケーブルに送ると共に、前記ケーブルを通して送られてくる前記反射電気エネルギーを当該反射電気エネルギー値に応じた直流電力として抽出することを特徴とする請求項10記載の内視鏡装置。
- 先端部の透明部材に設けられた超音波振動子に電気エネルギー発生部から電気エネルギーを供給して超音波振動を発生させ、この超音波振動を前記透明部材に与えることにより当該透明部材に設けられた回折格子により前記透明部材の表面を伝播する弾性表面波に変換する内視鏡装置の動作制御方法において、
検出部が前記超音波振動子に供給した前記電気エネルギーのうち前記超音波振動子と前記超音波振動子に前記電気エネルギーを供給する経路とを含むエネルギー供給系から反射された反射電気エネルギーを検出し、
判定部が前記検出部により検出された前記反射電気エネルギーに基づいて前記圧電振動子を適切に駆動するための前記電気エネルギーが前記超音波振動子に供給されているか否かを判定し、
制御部が前記判定部の判定結果に基づいて前記電気エネルギー発生部から出力される前記電気エネルギーを制御する、
ことを特徴とする内視鏡装置の動作制御方法。 - 前記判定部が行う判定では、前記反射電気エネルギー値と予め設定された閾値とを比較し、
前記制御部が行う制御では、前記反射電気エネルギー値が前記閾値以上であると判定すると、前記超音波振動子又は前記ケーブルのいずれか一方又は両方に予期しない事態が発生したとして前記電気エネルギー発生部からの前記電気エネルギーの出力を停止する、
ことを特徴とする請求項12記載の内視鏡装置の動作制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010222840A JP5752910B2 (ja) | 2010-09-30 | 2010-09-30 | 内視鏡装置及びその動作制御方法 |
| PCT/JP2011/071873 WO2012043468A1 (ja) | 2010-09-30 | 2011-09-26 | 内視鏡装置及びその動作制御方法 |
| EP11829022.0A EP2623015B1 (en) | 2010-09-30 | 2011-09-26 | Endoscope device and method for controlling operation thereof |
| CN201180046073.9A CN103153153B (zh) | 2010-09-30 | 2011-09-26 | 内窥镜装置及其动作控制方法 |
| US13/801,760 US9226647B2 (en) | 2010-09-30 | 2013-03-13 | Endoscopic apparatus and operation control method for the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010222840A JP5752910B2 (ja) | 2010-09-30 | 2010-09-30 | 内視鏡装置及びその動作制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012075615A JP2012075615A (ja) | 2012-04-19 |
| JP5752910B2 true JP5752910B2 (ja) | 2015-07-22 |
Family
ID=45892912
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010222840A Active JP5752910B2 (ja) | 2010-09-30 | 2010-09-30 | 内視鏡装置及びその動作制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9226647B2 (ja) |
| EP (1) | EP2623015B1 (ja) |
| JP (1) | JP5752910B2 (ja) |
| CN (1) | CN103153153B (ja) |
| WO (1) | WO2012043468A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3015698B1 (fr) * | 2013-12-20 | 2022-10-14 | Turbomeca | Endoscope et procede pour son utilisation |
| DE102014214754A1 (de) * | 2014-07-28 | 2016-01-28 | Digital Endoscopy Gmbh | Endoskopische Vorrichtung |
| CN113143355A (zh) | 2015-09-04 | 2021-07-23 | 美多斯国际有限公司 | 多护罩脊柱进入系统 |
| US11744447B2 (en) | 2015-09-04 | 2023-09-05 | Medos International | Surgical visualization systems and related methods |
| US11672562B2 (en) | 2015-09-04 | 2023-06-13 | Medos International Sarl | Multi-shield spinal access system |
| US11439380B2 (en) | 2015-09-04 | 2022-09-13 | Medos International Sarl | Surgical instrument connectors and related methods |
| US10987129B2 (en) | 2015-09-04 | 2021-04-27 | Medos International Sarl | Multi-shield spinal access system |
| WO2017138211A1 (ja) * | 2016-02-12 | 2017-08-17 | オリンパス株式会社 | 走査型内視鏡システム |
| WO2018193519A1 (ja) * | 2017-04-18 | 2018-10-25 | オリンパス株式会社 | 内視鏡装置及びビデオプロセッサ |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4870950A (en) * | 1987-07-08 | 1989-10-03 | Kouji Kanbara | Endoscope system |
| US4924852A (en) * | 1987-09-11 | 1990-05-15 | Olympus Optical Co., Ltd. | Endoscope |
| JP2598474B2 (ja) * | 1987-12-09 | 1997-04-09 | オリンパス光学工業株式会社 | 超音波吸引装置 |
| JPH071130Y2 (ja) * | 1988-10-25 | 1995-01-18 | オリンパス光学工業株式会社 | 超音波処置装置 |
| JP3217386B2 (ja) * | 1991-04-24 | 2001-10-09 | オリンパス光学工業株式会社 | 診断システム |
| JP4046778B2 (ja) * | 1995-04-05 | 2008-02-13 | ソニー株式会社 | 光学ディスク記録再生装置 |
| WO2005082226A1 (ja) * | 2004-02-27 | 2005-09-09 | Olympus Corporation | 内視鏡 |
| JP5041657B2 (ja) * | 2004-08-18 | 2012-10-03 | オリンパス株式会社 | 内視鏡装置 |
| US20080188714A1 (en) * | 2007-02-07 | 2008-08-07 | Boston Scientific Scimed, Inc. | Electromechanical in-situ cleaning of optical elements |
| US9050036B2 (en) * | 2007-06-19 | 2015-06-09 | Minimally Invasive Devices, Inc. | Device for maintaining visualization with surgical scopes |
| JP5129004B2 (ja) * | 2008-04-16 | 2013-01-23 | オリンパス株式会社 | 内視鏡装置 |
| JP5330180B2 (ja) * | 2009-10-02 | 2013-10-30 | オリンパス株式会社 | 内視鏡装置 |
-
2010
- 2010-09-30 JP JP2010222840A patent/JP5752910B2/ja active Active
-
2011
- 2011-09-26 CN CN201180046073.9A patent/CN103153153B/zh not_active Expired - Fee Related
- 2011-09-26 WO PCT/JP2011/071873 patent/WO2012043468A1/ja active Application Filing
- 2011-09-26 EP EP11829022.0A patent/EP2623015B1/en not_active Not-in-force
-
2013
- 2013-03-13 US US13/801,760 patent/US9226647B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20130197308A1 (en) | 2013-08-01 |
| CN103153153A (zh) | 2013-06-12 |
| WO2012043468A1 (ja) | 2012-04-05 |
| EP2623015B1 (en) | 2017-01-11 |
| EP2623015A1 (en) | 2013-08-07 |
| CN103153153B (zh) | 2015-11-25 |
| US9226647B2 (en) | 2016-01-05 |
| EP2623015A4 (en) | 2015-04-15 |
| JP2012075615A (ja) | 2012-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5752910B2 (ja) | 内視鏡装置及びその動作制御方法 | |
| JP6450892B1 (ja) | 内視鏡 | |
| JP6170240B2 (ja) | 超音波内視鏡 | |
| US20080188714A1 (en) | Electromechanical in-situ cleaning of optical elements | |
| JP2598474B2 (ja) | 超音波吸引装置 | |
| JP5485041B2 (ja) | 内視鏡装置 | |
| JP2009254571A (ja) | 内視鏡装置 | |
| EP1621135A1 (en) | Ultrasonic endoscope | |
| JP6625746B2 (ja) | 超音波内視鏡、及びその製造方法 | |
| CN112469322A (zh) | 内窥镜用连接器和内窥镜 | |
| JP5551844B1 (ja) | 内視鏡装置及び治療装置 | |
| JP2009189496A (ja) | 内視鏡装置、内視鏡の観察窓表面に付着した汚れ及び曇りを除去する内視鏡装置の制御方法。 | |
| JP5826551B2 (ja) | 内視鏡装置 | |
| JP5399305B2 (ja) | 撮像装置及び内視鏡 | |
| JP6677799B2 (ja) | 超音波振動子ユニット | |
| JP2012005533A (ja) | 内視鏡装置 | |
| JP2013048693A (ja) | 内視鏡装置 | |
| JP2012213483A (ja) | 内視鏡装置 | |
| JP6830913B2 (ja) | 超音波内視鏡及び内視鏡装置 | |
| WO2013021780A1 (ja) | 内視鏡装置 | |
| JP2006280407A (ja) | 超音波内視鏡 | |
| JP7301114B2 (ja) | 超音波診断装置、及び、超音波診断装置の作動方法 | |
| JP7523882B2 (ja) | 内視鏡と、その衝撃検出方法、及び衝撃検出プログラム | |
| JP2006130222A (ja) | 超音波内視鏡 | |
| JP2012020066A (ja) | 内視鏡システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150428 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150521 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5752910 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |