本発明において、好適には、前記エンジンは、燃料の燃焼によって動力を発生する内燃機関などである。前記回転機は、回転電気機械であって、具体的には発電機、電動モータ、或いはそれ等の機能が択一的に得られるモータジェネレータである。前記回転機は、前記断接装置を介して前記エンジンに接続される車輪にその断接装置を介すことなく接続されてその車輪を駆動するものでも良いが、そのエンジンが前輪(或いは後輪)を駆動する場合にその回転機は後輪(或いは前輪)を駆動するなどそのエンジンとは異なる車輪を駆動するように構成することもできる。前記断接装置は、動力伝達を接続遮断できるもので、エンジンから車輪までの動力伝達経路に設けられた湿式或いは乾式の係合装置(例えば摩擦係合式や噛合式のクラッチやブレーキ)、その動力伝達経路の一部を構成する自動変速機内に設けられてその自動変速機を動力伝達が遮断された所謂ニュートラル状態とすることが可能な係合装置などである。
また、好適には、前記自動変速機を更に備える場合には、前記断接装置は、前記エンジンと前記自動変速機の出力回転部材(例えば出力軸)との間に設けられた第1クラッチと、その自動変速機の出力回転部材と前記車輪との間に設けられた第2クラッチとを備えていても良い。そして、前記断接装置を遮断した状態とは、前記第1クラッチ及び前記第2クラッチの少なくとも一方が動力伝達不能に解放されている状態であり、前記断接装置を接続した状態とは、前記第1クラッチ及び前記第2クラッチの何れもが動力伝達可能に係合されている状態である。このようにすれば、前記断接装置を遮断した状態で前記回転機のみを走行用駆動力源として走行する際に、第1の減速モードとしてその回転機のみで車両減速度を発生させることが可能であると共に、第2の減速モードとして少なくとも前記エンジンで車両減速度を発生させることが可能である。
また、好適には、前記自動変速機は、変速機単体、トルクコンバータ等の流体式伝動装置を有する変速機、或いは副変速機を有する変速機などにより構成される。この変速機は、公知の遊星歯車式自動変速機、公知の同期噛合型平行軸式自動(/手動)変速機、その同期噛合型平行軸式自動変速機であるが入力軸を2系統備える型式の変速機である所謂DCT(Dual Clutch Transmission)、公知のベルト式無段変速機、公知のトラクション型無段変速機などにより構成される。
また、好適には、前記車両は、前記回転機のみで車両減速度を発生させることが可能な前記第1の減速モードとして、前記エンジンを駆動力伝達経路から切り離して前記回転機のみを走行用駆動力源として用いて走行できるEV(Electric Vehicle;電気自動車)走行モードを有している。また、第1の減速モードとして、駆動力伝達経路から切り離された前記エンジンで例えば発電機を回転駆動して発電しながら前記回転機のみを走行用駆動力源として用いて走行できるシリーズHEV(Hybrid Electric Vehicle;ハイブリッド式電気自動車)走行モードを含んでいても良い。これらEV走行モードやシリーズHEV走行モードは、前記断接装置を遮断した状態で回転機のみを走行用駆動力源として走行するモータ走行を実行する為の走行モードである。
また、好適には、前記車両は、前記エンジンで車両減速度を発生させることが可能な前記第2の減速モードとして、前記エンジンを駆動力伝達経路に接続して少なくともそのエンジンを走行用駆動力源として用いて走行できるパラレルHEV走行モードを有している。また、このパラレルHEV走行モードは、前記エンジンを駆動力伝達経路に接続して、そのエンジンと前記回転機とを走行用駆動力源として用いて走行できる狭義のパラレルHEV走行モードの他に、そのエンジンのみを走行用駆動力源として用いて走行できるエンジン走行モードや、そのエンジンと前記回転機とを走行用駆動力源として用いて走行すると共に例えばそのエンジンで発電機を回転駆動して発電するシリーズパラレルHEV走行モード等を含んでいても良い。言い換えれば、前記エンジンが常に走行用駆動力源として用いられ、前記回転機の少なくとも一方が常に或いはアシスト的に駆動力源として用いられるようになっておれば良い。また、このパラレルHEV走行モードにおいては、前記エンジンが車輪に対して接続されており、例えば減速走行時にそのエンジンで車両減速度を発生させることができる。
また、好適には、前記第1の減速モード中に前記エンジンが作動していない場合にそのエンジンを始動するときには、既にそのエンジンが作動している場合と比較して、始動後のそのエンジンの回転速度を低くすることにある。このようにすれば、元々前記エンジンが作動していない第1の減速モード中でのエンジン始動による違和感が抑制される。
図1は、本発明が適用される車両であるハイブリッド車両10(以下、車両10という)を構成する駆動装置12における動力伝達経路の概略構成を説明する図であると共に、車両10に設けられた制御系統の要部を説明する図である。図1において、駆動装置12は、走行用駆動力源(以下、駆動力源という)として機能させることが可能なエンジン14及び第1モータジェネレータMG1を備え、左右一対のフロント側の車輪である前駆動輪16を駆動するフロント駆動部12Aと、駆動力源として機能させることが可能な第2モータジェネレータMG2を備え、左右一対のリヤ側の車輪である後駆動輪18を駆動するリヤ駆動部12Bとを含んでいる。
フロント駆動部12Aは、エンジン14と、そのエンジン14と前駆動輪16との間の動力伝達経路にエンジン14側から順に配設されて相互に直列に連結された、第1モータジェネレータMG1、第1クラッチC1、自動変速機20、第2クラッチC2、第1ギヤ対22、及びフロント差動歯車装置24とを備えている。このように、エンジン14は、それら第1モータジェネレータMG1、第1クラッチC1、自動変速機20、第2クラッチC2、第1ギヤ対22、及びフロント差動歯車装置24等を順に介して前駆動輪16に連結されている。
エンジン14は、燃料の燃焼で動力を発生する良く知られた内燃機関から構成されており、例えば吸入空気量、燃料噴射量、及び点火時期などを制御することで出力が調節される。また、エンジン始動時には、例えば第1モータジェネレータMG1がエンジン始動装置(エンジンスタータ)として機能する。
第1モータジェネレータMG1は、電動機としても発電機としても機能する交流同期型のモータジェネレータから構成され、インバータ26を介して蓄電装置28と電気的に接続されている。第1モータジェネレータMG1の作動はインバータ26により制御される。
自動変速機20は、第1クラッチC1を介して第1モータジェネレータMG1に連結された入力側溝幅可変プーリ30と、その入力側溝幅可変プーリ30と平行に配置され、第2クラッチC2を介して第1ギヤ対22に連結された出力側溝幅可変プーリ32と、それらのプーリ30,32にそれぞれ巻き掛けられた伝動ベルト34とを備える良く知られたベルト式無段変速機から構成されている。この自動変速機20では、油圧制御回路36によって溝幅可変プーリ30,32の溝幅がそれぞれ制御されることで入出力回転速度比すなわち変速比(ギヤ比)γ及びベルト挟圧力が変化させられるようになっている。上記変速比γは、入力側溝幅可変プーリ30の回転速度である入力側プーリ回転速度NCFと出力側溝幅可変プーリ32の回転速度である出力側プーリ回転速度NCRとの比(NCF/NCR)である。
第1クラッチC1及び第2クラッチC2は、それぞれ良く知られた湿式多板クラッチから構成されており、それぞれの係合/解放は、油圧制御回路36により制御される。また、第1クラッチC1と第2クラッチC2とは、エンジン14及び第1モータジェネレータMG1を前駆動輪16に対して連結を接続遮断できる断接装置である。この断接装置を遮断した状態とは、第1クラッチC1及び第2クラッチC2の少なくとも一方が動力伝達不能に解放されている状態であり、この断接装置を接続した状態とは、第1クラッチC1及び第2クラッチC2の何れもが動力伝達可能に係合されている状態である。
リヤ駆動部12Bは、第2モータジェネレータMG2と、その第2モータジェネレータMG2と後駆動輪18との間の動力伝達経路に第2モータジェネレータMG2側から順に配設されて相互に直列に連結された、第2ギヤ対38、及びリヤ差動歯車装置40とを備えている。このように、第2モータジェネレータMG2は、それら第2ギヤ対38及びリヤ差動歯車装置40等を順に介して後駆動輪18に連結されており、後駆動輪18に駆動力を伝達可能に配設された回転機である。
第2モータジェネレータMG2は、第1モータジェネレータMG1と同様に電動機としても発電機としても機能する交流同期型のモータジェネレータから構成され、インバータ26を介して蓄電装置28に電気的に接続されている。第2モータジェネレータMG2の作動はインバータ26により制御される。
また、本実施例の車両10は、所定の関係としての公知の変速マップに従って自動変速機20を変速する自動変速モードとユーザによる変速操作により自動変速機20を変速することが可能な手動変速モードとの間で自動変速機20の変速モードを切り替えることが可能である。その為、車両10には、変速モードを自動変速モードとする為の自動変速ポジションと変速モードを手動変速モードとする為の手動変速ポジションとを含む複数種類のシフトポジションPSHを人為的操作により選択操作可能なシフトポジション選択装置としてのシフトレバー50を備えた図2に示すようなシフト操作装置52が例えば運転席の横に配設されている。
図2において、シフトレバー50は、フロント駆動部12Aにおける動力伝達経路が遮断され且つ第2モータジェネレータMG2が無負荷状態(フリー状態)とされたニュートラル状態すなわち中立状態とし且つ自動変速機20の出力軸をロックする為の駐車ポジション(Pポジション)である「P(パーキング)」、後進走行の為の後進走行ポジション(Rポジション)である「R(リバース)」、前記中立状態とする為の中立ポジション(Nポジション)である「N(ニュートラル)」、自動変速モードを成立させて自動変速機20の変速可能な変速比γの変化範囲内で自動変速制御を実行させる為の自動変速ポジションとしての前進自動変速走行ポジション(Dポジション)である「D(ドライブ)」、又は手動変速モードを成立させてシフトレバー50の変速操作に応じて変更された所定の変速段(ギヤ段)に対応する変速比γとなるように自動変速機20の変速制御を実行させる為の手動変速ポジションとしての前進手動変速走行ポジション(Mポジション)である「M(マニュアル)」へ手動操作されるように設けられている。
特に、上記Mポジションは、例えば車両10の前後方向において上記Dポジションと同じ位置において車両10の幅方向に隣接して設けられており、シフトレバー50がMポジションへ操作されることにより、自動変速機20において複数の段階的な変速比に対応して予め設定されて記憶された複数の変速段の何れかがシフトレバー50の操作に応じて変更される。具体的には、このMポジションには、車両10の前後方向にアップシフト位置「+」、及びダウンシフト位置「−」が設けられており、シフトレバー50がそれ等のアップシフト位置「+」又はダウンシフト位置「−」へ操作されると、上記変速段の何れかへ切り換えられる。これにより、シフトレバー50のユーザ操作に基づいて、所望の変速段に切り換えられる。また、シフトレバー50はスプリング等の付勢手段により上記アップシフト位置「+」又はダウンシフト位置「−」から、Mポジションへ自動的に戻されるようになっている。
更に、車両10には、Mポジションにおけるアップシフト位置「+」又はダウンシフト位置「−」へのシフトレバー50による変速操作と同等の変速操作をすることが可能な変速操作装置54が設けられている。図3は、変速操作を行う為にシフトレバー50とは別に設けられた変速操作装置54の一例を示す図である。図3において、変速操作装置54は、ステアリングホイール56に搭載されたパドルスイッチ54であり、アップシフトスイッチ58及びダウンシフトスイッチ60が設けられている。アップシフトスイッチ58及びダウンシフトスイッチ60は、例えばステアリングホイール56を握ったままでドライバー側に操作することでシフトレバー50による変速操作と同等の変速操作が可能である。具体的には、シフトレバー50がMポジションに操作されているときに、アップシフトスイッチ58又はダウンシフトスイッチ60が操作されると、自動変速機20に予め設定された前記変速段の何れかへ切り換えられる。これにより、手動変速モードにおいて、パドルスイッチ54のユーザ操作に基づいて、所望の変速段に切り換えられる。また、パドルスイッチ54はスプリング等の付勢手段により初期位置へ自動的に戻されるようになっている。
尚、本実施例では、シフトレバー50にてDポジションが選択されているときであってもパドルスイッチ54を用いた変速操作により一時的に手動変速モードに移行することが可能である。具体的には、シフトレバー50がDポジションに操作されているときに、アップシフトスイッチ58又はダウンシフトスイッチ60が操作されると、変速モードが一時的に手動変速モードとされ、パドルスイッチ54のユーザ操作に応じて自動変速機20に予め設定された前記変速段の何れかへ切り換えられる。
また、シフトレバー50又はパドルスイッチ54による変速操作は、基本的には、手動変速モードにおいて自動変速機20に設定された複数のギヤ段を手動操作によって切り換えるものであるが、変速機を介することなく動力を伝達する第2モータジェネレータMG2においても、このような変速操作の概念を適用することが可能である。例えば、第2モータジェネレータMG2が出力可能な駆動トルク或いは回生トルクを段階的に設定し、その段階的に設定されたトルクをシフトレバー50又はパドルスイッチ54のユーザ操作に応じて出力することで、第2モータジェネレータMG2のみを用いた走行時(すなわちモータ走行時)には、ユーザは、あたかもギヤ段を切り換えるかの如く、自動変速機20における変速操作に応じて生じる加速感や減速感と同等の感覚を得ることができる。その為、本実施例では、自動変速機20の変速が拘わらないような走行時例えばモータ走行時においても、便宜上、段階的に設定するトルクをギヤ段と見立て、手動変速モード時には、自動変速機20と同様に複数のギヤ段を設定し、アップシフト操作やダウンシフト操作の概念を適用する。また、アップシフト操作やダウンシフト操作の変速操作は、駆動時には車両加速度を増減することに繋がり、減速走行時には車両減速度を増減することに繋がるものである。特に、モータ走行中の減速走行時には、シフトレバー50又はパドルスイッチ54によるユーザ操作は、車両減速度を増減する減速度増減操作(減速度減少操作や減速度増大操作)と言うべきものである。そこで、本実施例では、この減速度増減操作を、シフトレバー50又はパドルスイッチ54による変速操作(アップシフト操作やダウンシフト操作)と同意に取り扱う。具体的には、本実施例では、ユーザによる減速度増減操作により車両減速度を増減することが可能な手動モードとしての手動変速モードを備えており、手動変速モードにおける変速操作は、この手動モードにおけるユーザによる減速度増減操作すなわちユーザの減速度要求に相当する。例えば、ダウンシフト操作は、ユーザ操作により車両減速度を大きくする減速度増大操作すなわちユーザの減速度要求を大きくする減速度増大要求に相当する。また、アップシフト操作は、ユーザ操作により車両減速度を小さくする減速度減少操作すなわちユーザの減速度要求を小さくする減速度減少要求に相当する。
図1に戻り、車両10には、例えばハイブリッド駆動制御などに関連する制御装置を含む電子制御装置100が備えられている。電子制御装置100は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより車両10の各種制御を実行する。例えば、電子制御装置100は、エンジン14の出力制御、第1モータジェネレータMG1及び第2モータジェネレータMG2の回生制御を含む出力制御、自動変速機20の変速制御、第1クラッチC1及び第2クラッチC2の係合制御等を実行するようになっており、必要に応じてエンジン制御用や回転機制御用や油圧制御用等に分けて構成される。
電子制御装置100には、例えばエンジン回転速度センサ70により検出されたエンジン14の回転速度であるエンジン回転速度NEを表す信号、入力回転速度センサ72により検出された自動変速機20の入力回転速度である変速機入力回転速度NIN(すなわち入力側プーリ回転速度NCF)を表す信号、出力回転速度センサ74により検出された車速Vに対応する自動変速機20の出力回転速度である変速機出力回転速度NOUT(すなわち出力側プーリ回転速度NCR)を表す信号、第1回転機回転速度センサ76により検出された第1モータジェネレータMG1の回転速度である第1回転機回転速度NMG1を表す信号、第2回転機回転速度センサ78により検出された第2モータジェネレータMG2の回転速度である第2回転機回転速度NMG2を表す信号、アクセル開度センサ80により検出された運転者(ユーザ)による車両10に対する駆動力要求量(ドライバ要求出力)としてのアクセルペダルの操作量であるアクセル開度Accを表す信号、シフトポジションセンサ82により検出されたシフトレバー50の操作位置(アップシフト位置「+」及びダウンシフト位置「−」を含む)であるシフトポジション(レバーポジション、操作ポジション)PSHを表す信号、パドルスイッチ54により検出されたアップシフトスイッチ58におけるスイッチ操作SUPを表す信号、パドルスイッチ54により検出されたダウンシフトスイッチ60におけるスイッチ操作SDNを表す信号、バッテリセンサ84により検出された蓄電装置28のバッテリ温度THBATやバッテリ入出力電流(バッテリ充放電電流)IBATやバッテリ電圧VBATを表す信号などが、それぞれ供給される。尚、電子制御装置100は、例えば上記バッテリ温度THBAT、バッテリ充放電電流IBAT、及びバッテリ電圧VBATなどに基づいて蓄電装置28の充電状態(充電容量)SOCを逐次算出する。
また、電子制御装置100からは、例えばエンジン14の出力制御の為のエンジン出力制御指令信号SE、第1モータジェネレータMG1及び第2モータジェネレータMG2の作動を制御する為の回転機制御指令信号SM、第1クラッチC1及び第2クラッチC2や自動変速機20の油圧アクチュエータを制御する為に油圧制御回路36に含まれる電磁弁(ソレノイドバルブ)等を作動させる為の油圧指令信号SP、シフトポジションPSHに対応した「P」,「R」,「N」,「D」を表示させたり、Mポジション時(或いはDポジションでのパドルスイッチ54の操作時)の手動変速モードにおいて選択されているギヤ段を走行モード(E;EV走行モード、S;シリーズHEV走行モード、P;パラレルHEV走行モード)と共にインジケータ86に表示させる為の表示信号SDISなどが、それぞれ出力される。
図4は、電子制御装置100による制御機能の要部を説明する機能ブロック線図である。図4において、車両状態判定部すなわち車両状態判定手段102は、例えばシフトレバー50のシフトポジションPSHがDポジションであるか否かを判定する。また、車両状態判定手段102は、シフトレバー50のシフトポジションPSHがMポジションであるか否かを判定する。
変速制御部すなわち変速制御手段104は、自動変速機20の変速制御を実行する。変速制御手段104は、例えば車両状態判定手段102によりDポジションであると判定された場合には、変速モードを自動変速モードとして、車速Vとアクセル開度Acc(或いは変速機出力トルクTOUT等)とを変数として予め記憶された所定の関係(変速線図、変速マップ)から実際の車速V及びアクセル開度Accで示される車両状態に基づいて目標変速機入力回転速度NIN *を算出し、その目標変速機入力回転速度NIN *に向かって変速機入力回転速度NINが変化するように自動変速機20の油圧アクチュエータを制御する油圧指令信号SPを油圧制御回路36に出力する。これにより、Dポジション時の自動変速モードにおいて変速比γが自動制御される。また、変速制御手段104は、例えば車両状態判定手段102によりMポジションであると判定された場合には、変速モードを手動変速モードとして、上記変速マップに依ることなく、シフトレバー50或いはパドルスイッチ54におけるユーザによる変速操作に応じて、自動変速機20において複数の段階的な変速比に対応して予め設定されて記憶された複数の変速段を変更する油圧指令信号SPを油圧制御回路36に出力する。これにより、Mポジション時の手動変速モードにおいてユーザ操作に応じた所望の変速段に切り換えられる。また、変速制御手段104は、例えば車両状態判定手段102によりDポジションであると判定されているときにパドルスイッチ54が操作された場合には、変速モードを自動変速モードから一時的に手動変速モードとして、パドルスイッチ54におけるユーザによる変速操作に応じて、自動変速機20において複数の段階的な変速比に対応して予め設定されて記憶された複数の変速段を変更する油圧指令信号SPを油圧制御回路36に出力する。これにより、Dポジション時の一時的な手動変速モードにおいてユーザ操作に応じた所望の変速段に切り換えられる。また、変速制御手段104は、例えばDポジション時の一時的な手動変速モードにおいて、その一時的な手動変速モードから自動変速モードへ自動復帰させる為の自動復帰条件が成立したか否かを判定し、その自動復帰条件が成立した場合には、変速モードをDポジションの自動変速モードへ復帰させる。尚、上記自動復帰条件は、例えば一時的な手動変速モードにおける同一変速段でアクセルオン状態が連続して一定時間以上経過したとき、アクセル開度Accが大きい為に選択中の変速段では加速が不足するとき、或いは車両10が停止したときなどに成立する。
ハイブリッド制御部すなわちハイブリッド制御手段106は、エンジン14の駆動を制御するエンジン駆動制御手段としての機能と、インバータ26を介して第1モータジェネレータMG1及び第2モータジェネレータMG2による駆動力源又は発電機としての作動を制御する回転機作動制御手段としての機能と、油圧制御回路36を介して第1クラッチC1及び第2クラッチC2の作動を制御するクラッチ制御手段としての機能とを含んでおり、それら制御機能によりエンジン14及び回転機MGによるハイブリッド駆動制御等を実行する。例えば、ハイブリッド制御手段106は、図5に示す複数種類の走行モードを切り換えて走行するものである。
具体的には、図5において、EV走行モードは、第1クラッチC1及び第2クラッチC2を共に解放状態として(すなわち動力伝達経路の連結を遮断状態として)エンジン14を駆動力伝達経路から切り離した状態で、エンジン14を停止させると共に第1モータジェネレータMG1を無負荷状態(トルクが零のフリー回転状態)としながら、第2モータジェネレータMG2を力行制御して前進又は後進走行する。また、シリーズHEV走行モードは、第1クラッチC1及び第2クラッチC2を共に解放状態としてエンジン14を駆動力伝達経路から切り離した状態で、エンジン14を作動させて第1モータジェネレータMG1を回転駆動すると共に第1モータジェネレータMG1を発電制御(すなわち回生制御)しながら、上記EV走行モードと同様に第2モータジェネレータMG2を力行制御して前進又は後進走行する。このとき、第1モータジェネレータMG1によって得られた電力は、第2モータジェネレータMG2に供給されるか、或いは蓄電装置28の充電に用いられる。上記力行制御はモータジェネレータを電動モータとして用いることを意味し、発電制御はモータジェネレータを発電機として用いることを意味する。尚、この図5の実施例では、エンジン14を駆動力伝達経路から切り離す為に、第1クラッチC1及び第2クラッチC2を共に解放状態としたが、第1クラッチC1及び第2クラッチC2の少なくとも一方を解放状態としても良い。このように、EV走行モード及びシリーズHEV走行モードは、各々、第1クラッチC1及び第2クラッチC2の少なくとも一方を解放した状態で第2モータジェネレータMG2のみを駆動力源として走行するモータ走行が可能な第1走行モードである。
また、パラレルHEV走行モードは、第1クラッチC1及び第2クラッチC2を共に係合状態として(すなわち動力伝達経路の連結を接続状態として)エンジン14を駆動力伝達経路に接続することにより、少なくともエンジン14を駆動力源として走行することが可能な第2走行モードであり、パラレルHEV[1]−[3]の3種類のサブモードを備えている。1番上のサブモードであるパラレルHEV[1](狭義のパラレルHEV走行モード)では、エンジン14を作動させると共に第1モータジェネレータMG1を力行制御することによりエンジン14及び第1モータジェネレータMG1を駆動力源として走行し、第2モータジェネレータMG2は無負荷状態とされる。このパラレルHEV[1]では、第1モータジェネレータMG1の代わりに第2モータジェネレータMG2を力行制御しても良いし、第1モータジェネレータMG1及び第2モータジェネレータMG2を両方共に力行制御して駆動力を発生させるようにしても良い。2番目のサブモードであるパラレルHEV[2](シリーズパラレルHEV走行モード)では、エンジン14を作動させると共に第2モータジェネレータMG2を力行制御することにより、エンジン14及び第2モータジェネレータMG2を駆動力源として走行する一方、第1モータジェネレータMG1を発電制御する。このとき、第1モータジェネレータMG1によって得られた電力は、第2モータジェネレータMG2に供給されるか、或いは蓄電装置28の充電に用いられる。このパラレルHEV[2]では、第1モータジェネレータMG1を力行制御して駆動力源として用いると共に、第2モータジェネレータMG2を発電制御するようにしても良い。3番目のサブモードであるパラレルHEV[3](エンジン走行モード)では、エンジン14を作動させてそのエンジン14のみを駆動力源として走行する走行モードであり、第1モータジェネレータMG1及び第2モータジェネレータMG2は何れも無負荷状態とされる。
上記パラレルHEV[1]は、パラレルHEV[3]に比較して大きな駆動力を発生させることができ、例えばアクセル開度Accが増大した加速要求時や高速走行時等にアシスト的に第1モータジェネレータMG1が力行制御されることにより、パラレルHEV[3]からパラレルHEV[1]へ速やかに切り換えられる。また、パラレルHEV[2]もパラレルHEV[1]と同様に実施されるが、例えば蓄電装置28の充電容量SOCが比較的多い場合にパラレルHEV[1]が実行され、充電容量SOCが比較的少ない場合はパラレルHEV[2]が実行される。
ハイブリッド制御手段106は、予め定められたモード切換条件に従って上記EV走行モード、シリーズHEV走行モード、パラレルHEV走行モードを切り換えて走行する。モード切換条件は、例えば図6に示すようにアクセル開度Acc等の要求駆動力及び車速Vをパラメータとして2次元のモード切換マップとして予め設定されており、ES切換線(実線)よりも低要求駆動力、低車速側がEV走行モードで走行するEV領域であり、そのES切換線とSP切換線(一点鎖線)との間がシリーズHEV走行モードで走行するシリーズHEV領域であり、そのSP切換線よりも高要求駆動力、高車速側がパラレルHEV走行モードで走行するパラレルHEV領域である。尚、これ等の各切換線には、僅かな車速変化や要求駆動力変化で走行モードが頻繁に切り換わることを防止する為にヒステリシス(不図示)が設けられている。
また、ハイブリッド制御手段106は、アクセル開度Accが零と判断されるアクセルオフの減速走行時には減速走行モードを実施する。例えば、EV走行モード或いはシリーズHEV走行モードでのモータ走行中に減速走行となったときのモータ走行時減速走行モード(後述する狭義のモータ走行時減速走行モード)では、第1クラッチC1及び第2クラッチC2を共に解放状態としたままで、力行制御していた第2モータジェネレータMG2を発電制御(回生制御)することにより、発電制御による回転抵抗で第2モータジェネレータMG2のみで車両10に制動力を作用させる(すなわち車両減速度を発生させる)と共に発生した電気エネルギーで蓄電装置28を充電する。また、パラレルHEV走行モードでの走行中に減速走行となったときのパラレル走行時減速走行モードでは、第1クラッチC1及び第2クラッチC2を共に係合状態としたままで、第1モータジェネレータMG1及び第2モータジェネレータMG2を各々無負荷状態とするか或いは発電制御して、少なくともエンジン14の回転抵抗で車両10にエンジンブレーキ力を作用させる(すなわち車両減速度を発生させる)。
表示制御部すなわち表示制御手段108は、P,R,N,Dポジション時には、シフトポジションPSHに応じた表示(「P」,「R」,「N」,「D」)をインジケータ86に点灯させる。また、表示制御手段108は、Mポジション時又はDポジションでのパドルスイッチ54の操作時(すなわちDポジション時の一時的な手動変速モード時)には、手動変速モードにおいて選択されているギヤ段(すなわちユーザの減速度要求に対応するギヤ段)に応じた表示(例えば「1」,「2」,「3」,「4」,「5」,「6」)をインジケータ86に点灯させる。また、表示制御手段108は、この手動変速モード時には、設定されている走行モード(EV走行モード,シリーズHEV走行モード,パラレルHEV走行モード)に応じた表示(E,S,P)をインジケータ86に点灯させる。
ここで、本実施例の車両10では、EV走行モード、シリーズHEV走行モード、パラレルHEV走行モードを適宜切り換えて走行している。そして、図6のマップからも明らかなように、エンジン14を動力伝達経路に接続するパラレルHEV走行モードでの走行の方が、モータ走行(EV走行モード、シリーズHEV走行モード)よりも大きな駆動力を発生させられる。また、減速走行時には、エンジンブレーキを作用させられることに加えて第1,2モータジェネレータMG1,2を回生制御させられるパラレルHEV走行モードでの走行の方が、第2モータジェネレータMG2の回生制御のみで車両減速度を発生させるモータ走行よりも大きな車両減速度を発生させられる。
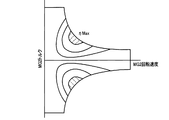
図7は、同一条件(例えば同一車速)の下で、モータ走行(EV走行モード、シリーズHEV走行モード)時に発生させることができる車両減速度の範囲と、パラレルHEV走行モードでの走行時に発生させることができる車両減速度の範囲との一例を示す図である。図7において、パラレルHEV走行モードでの走行時には、低車速側のギヤ比γ(Loギヤ比側)となる程大きな車両減速度を発生させられ、モータ走行時と比較して、より大きな車両減速度の範囲まで実現可能である。また、図7中に示した黒丸●は、手動変速モードにおいて設定された各ギヤ段にて設定される車両減速度を表している。P1はパラレルHEV走行モードで設定される最大変速比となる最低車速側のギヤ段(最Loギヤ段、第1速ギヤ段)であり、P2−P8はそれぞれパラレルHEV走行モードで設定される第2速ギヤ段−第8速ギヤ段である。また、E1はEV走行モードで設定される最低車速側のギヤ段(最Loギヤ段、第1速ギヤ段)であり、E2−E6はそれぞれEV走行モードで設定される第2速ギヤ段−第6速ギヤ段である。また、S1はシリーズHEV走行モードで設定される最低車速側のギヤ段(最Loギヤ段、第1速ギヤ段)であり、S2−S6はそれぞれシリーズHEV走行モードで設定される第2速ギヤ段−第6速ギヤ段である。このように、本実施例では、モータ走行時の各ギヤ段(E1,S1)−(E6,S6)にて、それぞれパラレルHEV走行モードでの走行時の各ギヤ段P3−P8での車両減速度と同等の車両減速度が得られるように設定されている。
具体的には、ハイブリッド制御手段106は、減速走行中には、各走行モードに合わせて、シフトレバー50或いはパドルスイッチ54を用いたユーザの変速操作に応じた図7に示すような各ギヤ段に対応する車両減速度を発生させる。ところで、モータ走行(EV走行モード、シリーズHEV走行モード)中に、最Loギヤ段(E1、S1)が選択されているときに、更に、シフトレバー50或いはパドルスイッチ54を用いたダウンシフト操作が為されたとしても、そのダウンシフト操作に応じた車両減速度を第2モータジェネレータMG2のみで実現することはできない。つまり、最Loギヤ段(E1、S1)はモータ走行での減速走行中に第2モータジェネレータMG2のみで実現できる限界の車両減速度を発生可能なギヤ段であるので、パラレルHEV走行モードでの走行時に発生させられた車両減速度を期待してユーザがその最Loギヤ段(E1、S1)から更にダウンシフト操作しても、モータ走行での減速走行中では、ユーザが要求する(期待する)車両減速度を発生させられない。
そこで、本実施例の電子制御装置100は、エンジン14が前駆動輪16に対して遮断された状態で車両10が走行している際に(すなわちモータ走行している際に)、ユーザの減速度要求に対応した車両減速度を第2モータジェネレータMG2のみで出力する第1の減速モード(以下、第1減速モードという)と、第1クラッチC1及び第2クラッチC2を共に係合状態として少なくともエンジン14で車両減速度の一部を発生させる第2の減速モード(以下、第2減速モードという)とを備えている。つまり、広義のモータ走行時減速走行モードとして、前述した第2モータジェネレータMG2のみで車両減速度を発生させる狭義のモータ走行時減速走行モードである第1減速モードに加え、パラレル走行時減速走行モードに相当する第2減速モードを備えている。そして、この第2減速モードは、前記第1減速モードで実現可能な車両減速度よりも大きな車両減速度を発生させる為の減速度要求が運転者により為された場合に選択される。尚、第1減速モードで実現可能な車両減速度よりも大きな車両減速度は、第2モータジェネレータMG2の定格(最大出力)にて発生可能な車両減速度を超える車両減速度、第2回転機回転速度NMG2に対応する車速Vや第2モータジェネレータMG2の回生電力が供給される蓄電装置28の充電容量SOC等の条件によって出力(回生量)が制限される第2モータジェネレータMG2にて発生可能な車両減速度を超える車両減速度などが想定される。
具体的には、モータ走行での減速走行中にユーザにより要求された車両減速度を第2モータジェネレータMG2のみで実現できない場合は、例えばモータ走行での減速走行中にユーザによりダウンシフト操作が為されたときにそのダウンシフト操作に応じた車両減速度を第2モータジェネレータMG2のみで実現できない場合は、すなわちモータ走行での減速走行中に第2モータジェネレータMG2の出力可能な最大回生トルクに対応するMG2最大車両減速度を超えるような車両減速度を要求された場合は、つまりモータ走行での減速走行中に最Loギヤ段(E1、S1)からダウンシフト操作された場合は、第2モータジェネレータMG2のみで実現できない間だけ(すなわち最Loギヤ段(E1、S1)よりも更に低車速側へのダウンシフト操作が為されている間だけ)一時的に第2減速モード(パラレル走行時減速走行モード)へ移行して少なくともエンジン14で要求された車両減速度を発生させる。
例えば、図8に示すように、モータ走行では、最Hiギヤ段(E6、S6)から最Loギヤ段(E1、S1)までは、第1減速モード(狭義のモータ走行時減速走行モード)にて変速操作に応じた車両減速度(例えば図8中の車両減速度1−6)が発生させられる。加えて、モータ走行では、最Loギヤ段(E1、S1)からのダウンシフト操作に応じて、パラレルHEV走行モードへ移行して、第2減速モードにてパラレル走行時減速走行モードでの走行時と同等の車両減速度(例えば図8中の減速度7,8)が発生させられる。この図8は、前記図7と同様の関係を図表で示したものであり、特に、モータ走行(EV走行モード、シリーズHEV走行モード)において、最Loギヤ段(E1、S1)よりも更にダウンシフト操作が為された場合にパラレルHEV走行モードでの減速度7,8に対応するギヤ段P2,P1が新たに設定されている。これは、第2モータジェネレータMG2は、例えば図9に示す第2モータジェネレータMG2の等効率線(マップ、関係)から明らかなように、力行時、回生時共に、高回転領域では大きなトルクが発生させられない。一方で、エンジン14は、高回転速度となる程フリクション(回転抵抗)が大きくなり、大きなエンジンブレーキを発生させられる。その為、第2モータジェネレータMG2のみで所望の車両減速度を実現でき難い回転速度域では、エンジンブレーキやエンジンブレーキ及び回生ブレーキを用いる意義が生じるのである。尚、モータ走行におけるパラレルHEV走行モードへの移行は飽くまで一時的なものであり、例えば第2モータジェネレータMG2のみで車両減速度を発生可能な各ギヤ段(E1,S1)−(E6,S6)へアップシフト操作が為された場合には、モータ走行へ復帰し、そのモータ走行にてユーザによる変速操作に応じた車両減速度が発生させられる。
より具体的には、図4に戻り、車両状態判定手段102は、例えばハイブリッド制御手段106によるモータ走行中の減速走行時であるか否かを、モータ走行中にアクセルオフとなったか否かに基づいて判定する。また、車両状態判定手段102は、例えばモータ走行中の減速走行時に、最Loギヤ段(E1、S1)とされているか否かを判定する。
ダウンシフト操作判定部すなわちダウンシフト操作判定手段110は、例えばシフトレバー50或いはパドルスイッチ54を用いた手動変速モードでのダウンシフト操作が為されたか否かを、シフト操作装置52におけるダウンシフト位置「−」に対応するシフトポジションPSHを表す信号、或いはダウンシフトスイッチ60におけるスイッチ操作SDNを表す信号に基づいて判定する。また、ダウンシフト操作判定手段110は、例えば手動変速モードでの最Loギヤ段(E1、S1)へのダウンシフト操作が為されたか否かを判定する。
ハイブリッド制御手段106は、車両状態判定手段102によりモータ走行中の減速走行時であると判定された場合には、現ギヤ段に応じた車両減速度を第2モータジェネレータMG2のみで発生させるか、或いは手動変速モードにおけるユーザによる変速操作に応じた車両減速度を第2モータジェネレータMG2のみで発生させる。
また、ハイブリッド制御手段106は、モータ走行中の減速走行時に、車両状態判定手段102により最Loギヤ段(E1、S1)とされていると判定されたときに(或いはダウンシフト操作判定手段110により最Loギヤ段(E1、S1)へのダウンシフト操作が為されたと判定されたときに)、更にダウンシフト操作判定手段110によりダウンシフト操作が為されたと判定された場合には、一時的にパラレルHEV走行モードへ移行して少なくともエンジン14によるエンジンブレーキによりダウンシフト操作に応じた車両減速度を発生させる(例えば図8のEV走行モード或いはシリーズHEV走行モードにおけるP2,P1参照)。尚、最Loギヤ段(E1、S1)での車両減速度よりも大きな車両減速度をユーザが積極的に要求したときに、その要求した車両減速度を発生させるという観点から、ハイブリッド制御手段106は、例えば最Loギヤ段(E1、S1)からの更なるダウンシフト操作が所定時間以上連続して為された場合に、一時的にパラレルHEV走行モードへ移行するようにしても良い。その為、ダウンシフト操作判定手段110は、ダウンシフト操作が所定時間以上連続して為されたか否かを判定する。この所定時間は、例えばユーザが積極的にダウンシフト操作をしていると判断する為の予め実験的に求められて記憶されたダウンシフト操作判定値である。
また、ハイブリッド制御手段106は、例えば一時的にパラレルHEV走行モードへ移行しているときに、減速走行でなくなった場合には、手動変速モードから自動変速モードへ移行した場合には、或いは第2モータジェネレータMG2のみで車両減速度を発生可能な各ギヤ段(E1,S1)−(E6,S6)へのアップシフト操作が為された場合には、モータ走行へ復帰する。
ここで、上述したように、モータ走行にはエンジン14が停止しているEV走行モードと、エンジン14が運転しているシリーズHEV走行モードとの2つの走行モードがある。その為、シリーズHEV走行モードからパラレルHEV走行モードとするときには、エンジン14自身の回転制御(或いはエンジン14自身の回転制御及び第1モータジェネレータMG1の制御)によりエンジン回転速度NEを同期回転速度(或いは同期回転速度+所定マージン)とした状態でエンジン14のフューエルカットを実行し、その後速やかにパラレルHEV走行モードとする。上記エンジン14の同期回転速度は、第1クラッチC1及び第2クラッチC2の接続後における同期回転速度であって、例えば手動変速モード時に変速操作によって要求された変速段におけるエンジン回転速度NEであり、変速機出力回転速度NOUTと要求された変速段に対応する自動変速機20の変速比γとから一意的に算出される。一方、EV走行モードからパラレルHEV走行モードへ移行するときには、エンジン14を点火することなく、前駆動輪16側からエンジン14を連れ回すことでエンジン回転速度NEを引き上げつつエンジンブレーキを作用させる。但し、減速ショックが大きくなる(車両減速度が出過ぎる)可能性があるので、例えば第2クラッチC2のトルク容量制御によりエンジンブレーキ力を制御しても良いし、或いは第1モータジェネレータMG1の力行制御によりエンジン14の同期回転速度までエンジン回転速度NEの引き上げをアシストしても良い。又は、パラレルHEV走行モードへの移行に備えて、EV走行モード中の減速走行時に、最Loギヤ段(E1)とされている場合には(或いは最Loギヤ段(E1)へのダウンシフト操作が為された場合には)、エンジン14を始動してシリーズHEV走行モードとしても良い(例えば図8のEV走行モードにおけるE1(/S1)参照)。尚、EV走行モードからシリーズHEV走行モードを経由することなくパラレルHEV走行モードへ移行する場合には、シリーズHEV走行モードを経由する場合と比較して、例えばエンジン14を始動する為の始動電力が必要なく、またエンジン14を作動した状態にしておく為の燃料消費がなくなる為、燃費を犠牲にせずに車両減速度を得ることができるという効果が得られる。
また、ハイブリッド制御手段106は、EV走行モードでの走行中の減速走行時に、車両状態判定手段102により最Loギヤ段(E1)とされていると判定され(或いはダウンシフト操作判定手段110により最Loギヤ段(E1)へのダウンシフト操作が為されたと判定され)た場合には、エンジン14を始動してシリーズHEV走行モードへ移行する。
表示制御手段108は、例えば手動変速モード時には、設定されている走行モード(EV走行モード,シリーズHEV走行モード,パラレルHEV走行モード)に応じた表示と共に手動変速モードにおいて選択されているギヤ段に応じた表示をインジケータ86に点灯させる。具体的には、表示制御手段108は、図8に示すように、EV走行モード時では変速操作に応じてE6−E1(/S1)、P2,P1を、シリーズHEV走行モード時では変速操作に応じてS6−S1、P2,P1を、パラレルHEV走行モード時では変速操作に応じてP8−P1を、それぞれインジケータ86に点灯させる。
図10は、電子制御装置100の制御作動の要部すなわちモータ走行している際にユーザが要求する車両減速度を適切に発生させる為の制御作動を説明するフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
図10において、先ず、車両状態判定手段102に対応するステップ(以下、ステップを省略する)S10において、例えばモータ走行(EV走行モード、シリーズHEV走行モード)中の減速走行時であるか否かが判定される。このS10の判断が否定される場合は本ルーチンが終了させられるが肯定される場合はハイブリッド制御手段106に対応するS20において、例えば現ギヤ段に応じた車両減速度が第2モータジェネレータMG2のみで発生させられるか、或いは手動変速モードにおけるユーザによる変速操作に応じた車両減速度が第2モータジェネレータMG2のみで発生させられる。次いで、車両状態判定手段102及びダウンシフト操作判定手段110に対応するS30において、例えば最Loギヤ段(E1、S1)とされているか否かが判定されるか、或いは最Loギヤ段(E1、S1)へのダウンシフト操作が為されたか否かが判定される。このS30の判断が肯定される場合はハイブリッド制御手段106に対応するS40において、例えばEV走行モードでのモータ走行中である場合にはエンジン14が始動させられてシリーズHEV走行モードへ移行される。次いで、ダウンシフト操作判定手段110に対応するS50において、例えばダウンシフト操作が為されたか否かが、より具体的にはダウンシフト操作が所定時間以上連続して為されたか否かが判定される。一方、上記S30の判断が否定される場合はハイブリッド制御手段106に対応するS60において、例えば上記S40にてEV走行モードでのモータ走行中であるが為にエンジン14が始動させられてシリーズHEV走行モードへ移行されていた場合にはエンジン14が停止させられてEVモードへ復帰させられる。
上記S50の判断が否定される場合は上記S30に戻されるが肯定される場合はS70に対応するハイブリッド制御手段106及び表示制御手段108において、例えば一時的にパラレルHEV走行モードへ移行させられて少なくともエンジン14によるエンジンブレーキによりダウンシフト操作に応じた車両減速度が発生させられる。この際、例えばEV走行モード時或いはシリーズHEV走行モード時であってもダウンシフト操作に応じたパラレルHEV走行モード時と同様のギヤ段表示(例えばP2,P1)がインジケータ86に点灯される。次いで、車両状態判定手段102に対応するS80において、例えば減速走行でないか、第2モータジェネレータMG2のみで車両減速度を発生可能な各ギヤ段(E1,S1)−(E6,S6)へのアップシフト操作が為されたか、及び手動変速モードから自動変速モードへ移行させられたかの何れかが成立したか否かが判定される。このS80の判断が否定される場合はハイブリッド制御手段106に対応するS90において、例えば引き続き一時的なパラレルHEV走行モードが継続される。反対に、上記S80の判断が肯定される場合はハイブリッド制御手段106に対応するS100において、例えば一時的なパラレルHEV走行モードでの走行からモータ走行へ復帰させられる。
上述のように、本実施例によれば、モータ走行している際に、ユーザの減速度要求に対応した車両減速度を第2モータジェネレータMG2のみで出力する第1減速モード(狭義のモータ走行時減速走行モード)と、第1クラッチC1及び第2クラッチC2を共に接続して少なくともエンジン14で車両減速度の一部を発生させる第2の減速モード(パラレル走行時減速走行モードに相当)とが、備えられるので、例えば第1減速モードでは実現され得ないようなユーザが要求する車両減速度を達成することが可能になる。このように、モータ走行している際に、ユーザが要求する車両減速度を適切に発生させることができる。つまり、ユーザの幅広い減速度要求に対応することができる。
ここで、第2の発明は、前記第1の発明に記載の車両の制御装置において、前記第2減速モードは、前記第1減速モードで実現可能な車両減速度よりも大きな車両減速度を発生させる為の減速度要求がユーザにより為された場合に選択されるので、第2モータジェネレータMG2のみでは実現され得ないようなユーザが要求する車両減速度を達成することが可能になる。また、例えばユーザが要求する車両減速度が第2モータジェネレータMG2のみで実現されるようになれば第1減速モードが選択されることになり、あたかもモータ走行にて、第2モータジェネレータMG2のみでは実現され得ない車両減速度を発生させているかの如く感じさせることができる。また、例えばモータ走行をユーザが選択する為のEVスイッチがオンのときなどに、ユーザが要求する車両減速度の大きさによってはエンジンブレーキを効かせることが可能となる。また、EV走行モード或いはシリーズHEV走行モードであってもダウンシフト操作に応じたパラレルHEV走行モード時と同様のギヤ段表示(例えばP2,P1)がインジケータ86に点灯される。このように、例えば第1減速モードでの減速走行中に車両減速度をより大きくする為のユーザの減速度要求(ダウンシフト操作)が為されたときに、ユーザが要求する車両減速度を適切に発生させることができる。例えば、第2モータジェネレータMG2の定格(最大出力)にて発生可能な車両減速度を超える減速度要求、第2回転機回転速度NMG2に対応する車速Vや第2モータジェネレータMG2の回生電力が供給される蓄電装置28の充電容量SOC等の条件によって出力が制限される第2モータジェネレータMG2にて発生可能な車両減速度を超える減速度要求などが為されたときに、第2減速モードが選択されることで、ユーザが要求する車両減速度を適切に発生させることができる。
また、本実施例によれば、前記第1減速モードで実現可能な限界の車両減速度を発生させる為の減速度要求が運転者により為されたときに、すなわちモータ走行(EV走行モード及びシリーズHEV走行モード)での減速走行中に第2モータジェネレータMG2のみで実現できる限界の車両減速度を発生可能な最低車速側(最Loギヤ段)へのダウンシフト操作が為されたときに、エンジン14が作動していない場合には、エンジン14を始動してシリーズHEV走行モードへ移行するので、更なるダウンシフト操作が為されて前記第2減速モードが選択される場合(すなわちパラレルHEV走行モードへ移行する場合)に備えることができる。これは、第1減速モードから第2減速モードへ移行する場合は、第1,第2クラッチC1,C2の接続後における同期回転速度にある程度近づけてからその第1,第2クラッチC1,C2を係合しないと、ダウンシフト操作に応じた車両減速度以上の減速度が発生して減速ショックが増大する可能性がある為、第2減速モードへの移行に備えて、エンジン14を作動した状態にしておいてエンジン回転速度NEを同期させることが望ましいからである。尚、エンジン14が停止状態のまま第2減速モードへ移行する場合は、エンジン始動電力が必要なく、またエンジン14を作動した状態にしておく為の燃料消費がなくなる為、燃費を犠牲にせずに車両減速度を得ることができるという効果が得られる。この場合には、例えば第2減速モードへ移行するときの減速ショックを抑制する為に、車両減速度の増加勾配が抑制されるように例えば第2クラッチC2のトルク容量制御を実行しても良い。
また、本実施例によれば、ユーザの減速度要求は、手動変速モードにおけるユーザによる変速操作(減速度増減操作)であるので、ユーザが要求する手動変速モードにおける変速操作に応じた車両減速度を適切に発生させることができる。
また、本実施例によれば、モータ走行(EV走行モード及びシリーズHEV走行モード)での減速走行中に第2モータジェネレータMG2のみで実現できる限界の車両減速度を発生可能な最低車速側(最Loギヤ段)へダウンシフトされている状態で、その限界の車両減速度よりも大きな車両減速度を発生させる為のダウンシフト操作が所定時間以上連続してユーザにより為された場合に、前記第2減速モードが選択されるので、ユーザが積極的に要求した通常よりも大きな車両減速度を適切に発生させることができる。
次に、本発明の他の実施例を説明する。なお、以下の説明において実施例相互に共通する部分には同一の符号を付して説明を省略する。
図14は、本発明が適用される更に別のハイブリッド車両260を説明する図であり、(a)は概略構成図、(b)は各種の走行モードを説明する図である。図14(a)において、このハイブリッド車両260は、遊星歯車装置262を介してエンジン14、第1モータジェネレータMG1、第2モータジェネレータMG2、及び出力歯車264が接続されており、エンジン14と第1モータジェネレータMG1との間に第1クラッチC1が設けられていると共に、第1モータジェネレータMG1は第2クラッチC2を介して遊星歯車装置262のリングギヤRに連結されるようになっている。リングギヤRはブレーキ266によって回転不能に固定されるようになっている。遊星歯車装置262のサンギヤSに第2モータジェネレータMG2が連結され、キャリアCAに出力歯車264が連結され、その出力歯車264がフロント差動歯車装置24のリングギヤ268と噛み合わされている。そして、このハイブリッド車両260においても、図14(b)に示すように、前記実施例1と同様にEV走行モード、シリーズHEV走行モード、パラレルHEV走行モードが可能で、電子制御装置100によりそれ等の走行モードを切り換えて走行すると共に、図10のフローチャートに従って制御作動が行われる。
尚、この実施例では、EV走行モード及びシリーズHEV走行モードでエンジン14を駆動力伝達経路から切り離している第2クラッチC2が、エンジン14及び第1モータジェネレータMG1を前駆動輪16に対して接続遮断できる断接装置に相当する。従って、断接装置の接続と遮断との切換えは、第2クラッチC2の係合と解放とによって制御されることになる。従って、本実施例においても、実質的に前記実施例1,2と同様の作用効果が得られる。
また、上記図14(b)において、EV走行モードではブレーキ266を固定すると共に第2モータジェネレータMG2を力行制御して走行するが、ブレーキ266を解放すると共に第2クラッチC2を接続し、第1モータジェネレータMG1及び第2モータジェネレータMG2の両方を力行制御して走行することも可能である。また、パラレルHEV走行モードでは、パラレルHEV[1],[2]の2種類のサブモードが可能であり、上段のサブモードであるパラレルHEV[1]は狭義のパラレルHEV走行モードであり、エンジン14及び第2モータジェネレータMG2の両方を駆動力源として用いて走行する。下段のサブモードであるパラレルHEV[2]はシリーズパラレルHEV走行モードであり、上記パラレルHEV[1]において第1モータジェネレータMG1を発電制御するようになっている。
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明は実施例相互を組み合わせて実施可能であると共にその他の態様においても適用される。
例えば、前述の実施例では、エンジン14に連結された第1モータジェネレータMG1と、エンジン14及び第1モータジェネレータMG1を車輪に対して接続遮断できる断接装置と、車輪に駆動力を伝達可能に配設された第2モータジェネレータMG2とを備えるハイブリッド車両に、本発明を適用したが、必ずしもこれに限らない。例えば、車輪に駆動力を伝達可能に配設された回転機を少なくとも備えておれば良く、例えば第1モータジェネレータMG1を備えず、第2モータジェネレータMG2のみを回転機として備える車両であっても、本発明は適用され得る。
また、前述の実施例1−3では、第1モータジェネレータMG1がエンジン14と第1クラッチC1との間に設けられていたが、これに限らず、例えばエンジン14が第1モータジェネレータMG1と第1クラッチC1との間に設けられても良い。
また、前述の実施例1−3では、自動変速機20は、ベルト式無段変速機であったが、これに限らず、例えば遊星歯車式の有段式自動変速機や平行軸式自動(又は手動)変速機など、その他の公知の変速機であっても良い。また、自動変速機20は、必ずしも備えられている必要はない。
また、前述の実施例1−3では、エンジン14を車輪に対して接続遮断できる断接装置として、第1クラッチC1及び第2クラッチC2を備えていたが、必ずしもこれに限らない。例えば、断接装置として、エンジン14を車輪に対して接続遮断できる係合装置が少なくとも1つ備えられておれば良い。また、前述の実施例1−3のように、自動変速機20がベルト式無段変速機である場合には、第1クラッチC1に替えて、クラッチCやブレーキBの係合作動によって出力回転を入力回転に対して正側と負側とで切り換えることが可能な公知の前後進切換装置が用いられても良い。この場合、クラッチCやブレーキBが第1クラッチC1に相当する。また、例えば自動変速機20が遊星歯車式自動変速機である場合には、第1クラッチC1は、その遊星歯車式自動変速機の一部を構成し且つ解放によってその遊星歯車式自動変速機をニュートラル状態とすることが可能な係合装置であっても良い。
また、前述の実施例1−3では、最Loギヤ段(E1、S1)が選択されているモータ走行(EV走行モード、シリーズHEV走行モード)中にダウンシフト操作が為されると、一時的にパラレルHEV走行モードへ移行させる為に第1クラッチC1及び第2クラッチC2を共に係合状態とする必要があるので、例えばモータ走行中の手動変速モード時には、パラレルHEV走行モードへの移行に備えて、第1クラッチC1及び第2クラッチC2の一方を解放状態としたまま他方を予め係合状態とすることで、応答性を向上させても良い。この場合、好適には、第2クラッチC2を解放状態としたまま、第1クラッチC1を係合状態とすることが望ましい。これは、第2クラッチC2を係合状態とすると自動変速機20の慣性分を引き上げることになって前駆動輪16側に車両減速度が発生する可能性があるからである。
また、前述の実施例1−3では、パラレルHEV走行モードへの移行に備えて、最Loギヤ段時にEV走行モードの場合にはエンジン14を始動してシリーズHEV走行モードとしたが、EV走行モードの場合には、元々エンジン14が停止しているのを敢えて始動することになるので、ユーザの違和感を抑制する為に、シリーズHEV走行モードの場合と比較して、始動後のエンジン回転速度NEを低くしても良い(例えばアイドル回転速度)。また、最Loギヤ段時にシリーズHEV走行モードの場合には、この時点でエンジン回転速度NEを同期回転速度に制御しておいても良い。
また、前述の実施例では、手動変速モードは、シフトレバー50やパドルスイッチ54の操作に応じて変速段(ギヤ段)が指定されるギヤ段固定のものであったが、例えば自動変速制御における高速側(高車速側)の変速段の使用を制限する所謂マニュアルレンジが設定されるシフトレンジ固定のものであっても構わない。
また、前述の実施例では、パラレルHEV走行モードにてエンジンブレーキを作用させて車両減速度を発生させる場合にエンジン14をフューエルカットしたが、例えば少なくとも前駆動輪16側からエンジン14側へ入力されるトルクよりもエンジントルクが小さくなるような被駆動状態となれば良いので、必ずしもフューエルカットを実行する必要はない。
また、前述の実施例4において、ハイブリッド車両250は、第1クラッチC1を必ずしも備える必要ない。また、ハイブリッド車両250は、出力歯車252よりもエンジン14側に増速ギヤ(例えば変速比が1よりも小さな高速側ギヤ比(ハイギヤ比)となるギヤ対)を備え、その増速ギヤを介してエンジン14の動力を出力歯車252へ伝達するような構成であっても良い。このような構成とすることで、例えば低車速走行時にはモータ走行を実行すると共に、高車速走行時にはエンジン走行(モータジェネレータMGによるアシスト走行も含むパラレルHEV走行モードでの走行)をより適切に実行することができる。
尚、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。