JP5678357B2 - 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 - Google Patents
回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 Download PDFInfo
- Publication number
- JP5678357B2 JP5678357B2 JP2014509966A JP2014509966A JP5678357B2 JP 5678357 B2 JP5678357 B2 JP 5678357B2 JP 2014509966 A JP2014509966 A JP 2014509966A JP 2014509966 A JP2014509966 A JP 2014509966A JP 5678357 B2 JP5678357 B2 JP 5678357B2
- Authority
- JP
- Japan
- Prior art keywords
- vector
- rotation
- rotation axis
- magnetic
- angular velocity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 131
- 238000004364 calculation method Methods 0.000 title claims description 69
- 239000013598 vector Substances 0.000 claims description 402
- 230000001133 acceleration Effects 0.000 claims description 61
- 230000005389 magnetism Effects 0.000 claims description 22
- 230000008014 freezing Effects 0.000 claims description 12
- 238000007710 freezing Methods 0.000 claims description 12
- 230000007704 transition Effects 0.000 claims description 12
- 238000005259 measurement Methods 0.000 claims description 9
- 238000012545 processing Methods 0.000 claims description 5
- 238000012937 correction Methods 0.000 claims description 4
- 230000003068 static effect Effects 0.000 claims description 2
- 238000005096 rolling process Methods 0.000 claims 1
- 230000014509 gene expression Effects 0.000 description 22
- 238000000034 method Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 238000004422 calculation algorithm Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/02—Rotary gyroscopes
- G01C19/04—Details
- G01C19/32—Indicating or recording means specially adapted for rotary gyroscopes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/58—Turn-sensitive devices without moving masses
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Manufacturing & Machinery (AREA)
- Gyroscopes (AREA)
Description
(1)本発明の回転情報演算方法は、向きと大きさが安定な基準磁気を連続的に測定して三次元の磁気成分からなる磁気ベクトルを微小時間毎に取得する磁気ベクトル取得ステップと、第一時刻(ti)で取得された第一磁気ベクトル(Hi)と、該第一磁気ベクトル(Hi)と該第一時刻よりも微小時間(Δt)前である第二時刻(ti−1=ti−Δt)で取得された第二磁気ベクトル(Hi−1)との差分である第一差分ベクトル(ΔHi=Hi−Hi−1)との外積(Hi×ΔHi)を用いて仮性角速度ベクトル(ωpr)を算出する仮性角速度ベクトル算出ステップと、該第一時刻における回転軸を指標する回転軸ベクトル(n)を特定する回転軸ベクトル特定ステップと、該第一磁気ベクトル(Hi)と該回転軸ベクトル(n)のなす角である差角(αi)または該差角を指標する差角指標値を算出する差角算出ステップと、該仮性角速度ベクトル(ωpr)の大きさと該差角または該差角指標値と該回転軸ベクトル(n)を用いて該第一時刻における真性角速度ベクトル(ωth)を算出する真性角速度ベクトル算出ステップとを備え、
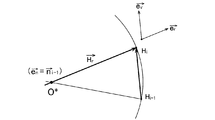
前記回転軸ベクトル特定ステップは、移動体が回転軸を変化させつつ回転運動をする自由軸回転モードにあるとき、前記第二時刻(t i−1 )における回転軸ベクトル(n i−1 )を用いた回転座標系により表現された前記第一時刻(t i )における瞬間回転中心(O * )から前記第一磁気ベクトル(H i )の終点に向かう動径ベクトル(Hr)と、該第一磁気ベクトル(H i )と、前記第一差分ベクトル(ΔH i )とを用いて、該回転軸ベクトル(n i−1 )に対する傾きをフィードバック演算により修正して回転軸ベクトル(n i )を特定するステップであり、
前記回転座標系は、前記第一時刻(t i )における回転軸ベクトル(n i )を近接している前記第二時刻(t i−1 )における回転軸ベクトル(n i−1 )と仮定( n i =n i−1 )して、e n =n i−1 とした軸方向の基本ベクトル(e n )と、該第一磁気ベクトル(H i )と前記差角(α i )から求めた前記動径方向ベクトル(Hr)の基本ベクトル(e r )と、該基本ベクトル(e n )と該基本ベクトル(e r )の外積(e n × e r )から求まる進行方向の基本ベクトル(e v )と、により該第一時刻(t i )において定義される瞬間座標系(e n , e v , e r )であり、
前記回転軸ベクトル(n i )と、前記差角(α i )または前記差角指標値と、前記仮性角速度ベクトル(ω pr )とにより、下式(式10)から求まる前記真性角速度ベクトル(ωth)を用いて前記移動体に関する回転情報を求めることを特徴とする回転情報演算方法。
ω th = (|ω pr |/sinα i )・n i (式10)
(1)本発明は上述した回転情報演算方法としてのみならず、メモリーへの格納若しくは媒体への記録または通信がなされ得ると共に、上述した回転情報演算方法をコンピューターで実行可能なことを特徴とする回転情報演算プログラムとしても把握できる。
(1)本発明の構成要素である各「ステップ」は、適宜、「手段」と読み替えられる。これにより、例えば、上述した本発明の回転情報演算方法の各構成要素は、実質的に本発明の回転情報演算プログラムの各構成要素となり得る。
本発明の回転情報演算方法は、例えば、以下に説明するような演算を順次繰り返して行うことにより実現され、これにより移動体の迅速な姿勢把握に必要な真性角速度ベクトル(ωth)を、ほぼ瞬間的に得ることが可能となる。
(1)回転運動する物体(質点)の瞬間的な角速度(時間Δtにおける角速度)は、式1Aに示す物理式により、回転軸に沿ったベクトル(角速度ベクトルωΔ)として算出される。その角速度の大きさはその角速度ベクトルの絶対値として求まり、回転軸はその角速度ベクトルを式1Bに示すように正規化した回転軸方向の単位ベクトル(nΔ)として求めることができる。
固定軸回転モードは、回転軸が安定的で実質的に変化しない場合である。この場合、式1Aおよび式1Bに基づく演算により、その回転軸または回転軸ベクトルnΔが特定される(回転軸ベクトル特定ステップ)。
自由軸回転モードは、回転軸が変化する場合である。この場合も、任意のHi点(時刻ti)における真の角速度ベクトルωthを遅れなく算出するために、前述した式2を基本式とする点は同様である。もっとも、固定軸回転モードの場合と同様に動径ベクトルHrを直接的に求めることは困難であるため、自由軸回転モードの場合も、大きさと向き(角速度ベクトルni)に分けて角速度ベクトルωthを算出する。
(1)基本判定
移動体の回転運動が、上述した固定軸回転モードにあるか、自由軸回転モードにあるかは、例えば、式1Aおよび式1Bから求まる上述した回転軸ベクトルnΔとΔHiとにより、式11から算出されるモード判定値Jを用いて判定可能である。このJは、nΔとΔHiのなす角をγとすると、cosγとなり、0〜1の範囲で変化し得る。
移動体が静止状態から回転状態に移行したり、固定軸回転モード中に移動体の回転変化が急激になったり、逆に自由軸回転モード中に移動体の回転変化が緩慢になったりする場合、モード判定値J(式11参照)による判定結果が、移動体の回転状態を的確に反映していない場合が生じ得る。具体的にいうと、例えば、固定軸回転モード中に、移動体の回転半径(曲率半径)が急減すると、式1Aおよび式1Bにより求まる回転軸ベクトルΔnも微小となり、相対的に誤差の影響を大きく受けるようになる。その結果、固定軸回転モードを維持すればよい状況であるにも拘わらず、Jの数値自体は自由軸回転モードを示すようなことが起こり得る。但し、回転する移動体に作用する角運動量保存則を考慮すると、固定軸回転モードと自由軸回転モードが極短時間に頻繁に入れ替わることは考えられず、Jに基づくモード判定が不安定になるのは過渡的または一時的であると考えられる。
本発明では、移動体に設定した座標系に基づいて基準磁気を連続的に測定して得られた三次元の磁気成分からなる磁気ベクトルの変化分(差分ベクトル)を微小時間毎に逐次算出して、回転情報の演算を行っている。このため、移動体の回転軸が、その基準磁気の軸(以下「基準軸」または「特異軸」という。基準磁気が地磁気の場合なら地軸が基準軸に相当する。)に近接すると、検出される磁気ベクトルの回転方向成分(差分ベクトル)が相対的に非常に小さくなる。このようなときに回転軸ベクトルの算出を行うと、誤差が生じ易くなる。もっとも、このような誤差を生じ易い特異領域は、全体の僅か数%程度である。また、移動体の回転運動が自由軸回転モードにある場合、その回転軸が一時的(または瞬間的)に特異領域に属する(基準軸に近接する)ことがあっても、通常、その回転軸は極短時間後にその特異領域から脱出する。
(1)本発明者がさらに研究したところ、移動体の回転モードとして、上述した固定軸回転モードと自由軸回転モード以外に、移動体が回転軸を変化させつつも、特定の姿勢を保持してほぼ一定の軌道軸周りに回転運動する軌道軸回転モードがさらに存在することがわかった。
(1)本発明では、移動体の回転運動が角運動量保存則(または慣性の法則)により急激な変化をしないことを前提として、適切な演算を逐次繰り返すことにより移動体の回転情報を精確に求めている。しかし、軌道軸回転モードの場合と同様に、人為的な操作等により移動体は急激な回転運動や特異な回転運動をし得る。その一例として、特定の回転軸まわりに回転している移動体の回転方向を、急激に反転(逆転)させたり、その反転を繰り返すような振動をさせたりする場合がある。なお、本明細書では、その振動も含めて単に反転という。
移動体の回転情報(特に角速度)を追従性よく精確に求めるには、演算方法のみならず、初期値(特に回転軸ベクトルniの初期値n0)が重要となる。移動体が回転状態にあれば、回転モードが変更になっても、継承できる初期値があるため、問題はあまり生じない。
移動体は、通常、基準磁気(地磁気)を三次元的に測定可能な磁気センサーのみならず、基準加速度(重力加速度)を三次元的に測定可能な加速度センサーも備え、それらセンサーにより得られた各成分(合計6成分)を処理して自身の姿勢(方位または向き)を把握する公知な三次元方位計算プログラムを備える。このようなシステムを本明細書では、適宜、「姿勢ジャイロスコープ」という。
既述したように、移動体の回転軸が基準磁気の軸(基準軸または特異軸)に近接すると、検出される磁気ベクトルひいては差分ベクトルの回転方向成分が小さくなる。このような状況は、瞬間的または一時的に回転運動している移動体の回転軸が基準軸に近接する場合の他、鉛直方向に延在する鉄筋(強磁性体)を有する建物内等で基準磁気が強磁性体によって垂直方向(鉛直方向)に偏向している環境下で移動体を略水平回転させる場合にも生じ得る。また基準磁気が地磁気である場合、地球の極点付近でも同様な状況が生じる。
本発明に係る磁気センサーは、特定の三次元座標系に沿って地磁気等の基準磁気を測定した際に三次元の磁気成分を検出できるものであれば足り、その種類等は問わない。例えば、磁気センサーとして、マグネト・インピーダンス素子(MI素子)、ホール素子、磁気抵抗素子等を利用することが考えられる。もっとも、応答性、感度、精度等のいずれにも優れ、小型化を図れるMIセンサーが磁気センサーとして好ましい。
(1)本発明に係る移動体は、本発明の磁気型ジャイロスコープを備えた測定モジュール、測定器機、それらを組み込んだ各種の電子器機等である。本発明の磁気型ジャイロスコープを用いると、方位や姿勢把握等に従来必要とされていた3軸ジャイロセンサーを省略できる。従って本発明の移動体は、携帯電話、スマートホン、タブレット端末、カーナビゲーション、デジタルカメラ等のように、小型化や低コスト化等が厳しく要請される電子器機であると好適である。ちなみに本発明の移動体は、回転情報を手ぶれ補正などに利用するデジタルカメラでもよい。
本発明の回転情報演算方法に係る一実施例であるフローチャートを図5に示した。先ず、ステップS1で、微小時間Δt毎に、地磁気(基準磁気)を測定する。地磁気の測定は、3軸磁気センサーを介してなされる。こうして3軸直交座標系に沿った3つの磁気成分からなる磁気ベクトルHiが順次取得される。得られた磁気ベクトルHiは携帯情報端末(移動体)等に備えられたメモリーに一時的に格納される(磁気ベクトル取得ステップ)。
上述したフローチャートを実行できる回転情報演算プログラムを組み込んだ磁気型ジャイロスコープと、従来の振動型ジャイロスコープ(MEMSジャイロセンサー)とを用いて、移動体の角速度を測定した結果を図6A〜図6Cに示した。図6Aは固定軸回転モード(z軸が回転軸)の場合であり、図6Bは回転軸が二次元的に変動する軌道軸回転モードの場合であり、図6Cは回転軸が三次元的に変動する自由軸回転モードの場合である。いずれのモードでも、本実施例に係る磁気型ジャイロスコープを用いたときの測定結果と、MEMSジャイロセンサーを用いたときの測定結果とはよく一致していた。なお、図6Cに示した自由軸回転モードのz成分(ωz)を観ると、両者間で多少ズレが生じているようにみえるが、これはMEMSジャイロセンサーのドリフト(ゼロ点の変動量)の影響が生じているに過ぎない。

Claims (16)
- 向きと大きさが安定な基準磁気を連続的に測定して三次元の磁気成分からなる磁気ベクトルを微小時間毎に取得する磁気ベクトル取得ステップと、
第一時刻(ti)で取得された第一磁気ベクトル(Hi)と、該第一磁気ベクトル(Hi)と該第一時刻よりも微小時間(Δt)前である第二時刻(ti−1=ti−Δt)で取得された第二磁気ベクトル(Hi−1)との差分である第一差分ベクトル(ΔHi=Hi−Hi−1)との外積(Hi×ΔHi)を用いて仮性角速度ベクトル(ωpr)を算出する仮性角速度ベクトル算出ステップと、
該第一時刻における回転軸を指標する回転軸ベクトル(n)を特定する回転軸ベクトル特定ステップと、
該第一磁気ベクトル(Hi)と該回転軸ベクトル(n)のなす角である差角(αi)または該差角を指標する差角指標値を算出する差角算出ステップと、
該仮性角速度ベクトル(ωpr)の大きさと該差角または該差角指標値と該回転軸ベクトル(n)を用いて該第一時刻における真性角速度ベクトル(ωth)を算出する真性角速度ベクトル算出ステップとを備え、
前記回転軸ベクトル特定ステップは、
移動体が回転軸を変化させつつ回転運動をする自由軸回転モードにあるとき、
前記第二時刻(t i−1 )における回転軸ベクトル(n i−1 )を用いた回転座標系により表現された前記第一時刻(t i )における瞬間回転中心(O * )から前記第一磁気ベクトル(H i )の終点に向かう動径ベクトル(Hr)と、該第一磁気ベクトル(H i )と、前記第一差分ベクトル(ΔH i )とを用いて、該回転軸ベクトル(n i−1 )に対する傾きをフィードバック演算により修正して回転軸ベクトル(n i )を特定するステップであり、
前記回転座標系は、前記第一時刻(t i )における回転軸ベクトル(n i )を近接している前記第二時刻(t i−1 )における回転軸ベクトル(n i−1 )と仮定( n i =n i−1 )して、e n =n i−1 とした軸方向の基本ベクトル(e n )と、該第一磁気ベクトル(H i )と前記差角(α i )から求めた前記動径方向ベクトル(Hr)の基本ベクトル(e r )と、該基本ベクトル(e n )と該基本ベクトル(e r )の外積(e n × e r )から求まる進行方向の基本ベクトル(e v )と、により該第一時刻(t i )において定義される瞬間座標系(e n , e v , e r )であり、
前記回転軸ベクトル(n i )と、前記差角(α i )または前記差角指標値と、前記仮性角速度ベクトル(ω pr )とにより、下式(式10)から求まる前記真性角速度ベクトル(ωth)を用いて前記移動体に関する回転情報を求めることを特徴とする回転情報演算方法。
ω th = (|ω pr |/sinα i )・n i (式10)
- 前記回転軸ベクトル特定ステップは、前記瞬間座標系(e n , e v , e r )において、
該座標系へ該第一時刻(t i )における実際の第一差分ベクトル(ΔH i )を射影した成分(a, b, c)を求め、該成分(a, b, c)を用いて下式(式9A、式9B)から該第一差分ベクトルに直交する該第一時刻(t i )における真の回転軸ベクトル(n i )を算出するステップである請求項1に記載の回転情報演算方法。
ω i ={(ab/d)e n −de v +(ac/d)e r }/|Hr|・Δt(式9A)
n i = ω i /|ω i | (式9B)
ここで d=(b 2 +c 2 ) 1/2 (式8A)
- 前記移動体が回転軸を変化させつつ特定の姿勢を保持して略一定の軌道軸の周りに回
転運動する軌道軸回転モードにあるとき、前記回転軸ベクトル特定ステップは、
前記自由軸回転モードで得られた少なくとも3つの時刻(t i 、t i−1 、t i−2 )における各回転軸ベクトル(n i 、n i−1 、n i−2 )の隣接間の差分ベクトルである第一軸変化ベクトル(Δn i =n i −n i−1 )と第二軸変化ベクトル(Δn i−1 =n i−1 −n i−2 )の外積(Δn i−1 ×Δn i )により前記軌道軸を指標する軌道軸ベクトル(n ob )を特定する軌道軸ベクトル特定ステップと、
該軌道軸ベクトル(n ob )と該回転軸ベクトル(n i )のなす角である軌道角(φ ob )または該軌道角を指標する軌道角指標値を算出する軌道角算出ステップと、
該軌道角または該軌道角指標値に基づいて該自由軸回転モードで得られた回転軸ベクトル(n i )を下式に基づいて修正した修正回転軸ベクトル(n i ’)を該軌道軸回転モードにおける新たな回転軸ベクトル(n i )とする回転軸ベクトル修正ステップと、
を有する請求項1に記載の回転情報演算方法。
n i ’=n i−1 +{Δn i sinφ ob −(n i ×Δn i )cosφ ob }
(式22)
- 前記回転軸ベクトル特定ステップは、さらに、
前記仮性角速度ベクトル(ωpr)または前記真性角速度ベクトル(ωth)の大きさがゼロとなる前後それぞれで、前記磁気ベクトルの差分ベクトルとして求められた前差分ベクトル(ΔHb)と後差分ベクトル(ΔHa)の向きが反転するとき
前記回転軸ベクトル(ni)の向きを反転させた反転回転軸ベクトル(−ni)を新たな回転軸ベクトル(ni)とする回転軸ベクトル反転ステップを有する請求項1〜3のいずれかに記載の回転情報演算方法。 - 前記回転軸ベクトル特定ステップは、さらに、
微小時間(Δt)内の磁気変化量(ΔH)が所定の微小範囲内にあるとき、
第一時刻(ti)と第二時刻(ti−1)で測定した基準磁気と基準加速度の三次元測定値を三次元方位計算プログラムで処理して得た各時刻における三次元方位値に基づいて算出した回転状態以前の静的回転軸ベクトル(ns0)を、回転状態へ移行した時の前記回転軸ベクトルの初期値(n1)とする初期値設定ステップを有する請求項1〜3のいずれかに記載の回転情報演算方法。 - 前記初期値設定ステップは、さらに、
微小時間(Δt)内の磁気変化量(ΔH)が所定の微小範囲内にあると共に前記移動体の動加速度が少なくとも所定の閾値以上となるとき、
前記第一差分ベクトル(ΔHi)と前記第二差分ベクトル(ΔHi−1)との外積(ΔHi−1×ΔHi)により算出される回転軸ベクトル(nΔ0)を、前記回転軸ベクトルの初期値(n1)とするステップを備える請求項5に記載の回転情報演算方法。 - 前記回転軸ベクトル特定ステップは、
重力加速度ベクトル(G)と動加速度ベクトル(Gm)のなす角またはその指標値(Q)が所定範囲内となるとき、
該重力加速度ベクトルを指標する指標ベクトル(ng)を前記回転軸ベクトルの初期値(n1)とする水平初期値設定ステップを有する請求項1〜3のいずれかに記載の回転情報演算方法。 - 前記回転軸ベクトル特定ステップは、前記第一差分ベクトル(ΔHi)と前記第二差分ベクトル(ΔHi−1=Hi−1−Hi−2)の外積(ΔHi−1×ΔHi)から求まる前記回転軸ベクトル(nΔ)と、該第一差分ベクトル(ΔHi)とを用いて算出されたモード判定値(J)に基づき、選択すべき回転モードを判定するモード判定ステップを備える請求項1または3に記載の回転情報演算方法。
- 前記モード判定ステップは、さらに、所定時間継続して前記モード判定値が所定範囲内となるときに、前記回転モードの変更を判定する待機判定ステップを備える請求項8に記載の回転情報演算方法。
- 前記モード判定ステップは、さらに、前記基準磁気を指標する基準磁気ベクトル(Hs)と前記回転軸ベクトルの近接具合を指標する近接指標値が所定の第一範囲内となるときに、前記回転モードの変更を凍結するモード判定凍結ステップを備える請求項8または9に記載の回転情報演算方法。
- 前記モード判定凍結ステップは、さらに、前記近接指標値が前記第一範囲に含まれる第二範囲内となるときに、前記回転軸ベクトルの更新を凍結する回転軸凍結ステップを含む請求項10に記載の回転情報演算方法。
- メモリーへの格納若しくは媒体への記録または通信がなされ得ると共に、請求項1〜11のいずれかに記載の回転情報演算方法をコンピューターで実行可能なことを特徴とする回転情報演算プログラム。
- 向きと大きさが安定な基準磁気を三次元的に測定可能な磁気センサーと、
請求項12に記載した回転情報演算プログラムを格納したメモリーと、
該回転情報演算プログラムを実行可能な演算装置とを備え、
移動体の姿勢変化に関する回転情報を出力し得ることを特徴とする磁気型ジャイロスコープ。 - さらに、重力加速度を含む加速度を三次元的に測定可能な加速度センサーを備える請求項13に記載の磁気型ジャイロスコープ。
- 請求項13または14に記載の磁気型ジャイロスコープを備えたことを特徴とする移動体。
- 請求項14に記載の磁気型ジャイロスコープと、
前記磁気センサーと前記加速度センサーとの出力値に基づいて三次元方位値を算出する姿勢ジャイロスコープと、
該姿勢ジャイロスコープから求まる三次元方位値である第一方位値(Dc)、該磁気型ジャイロスコープから求まる三次元方位値である第二方位値(Dj)、および角速度に基づいて算出される角速度パラメータ(Rω)と動加速度に基づいて算出される動加速度パラメータ(Rg)から求まる重み係数(A、B)を用いて求まる運動状態に応じた三次元方位値である適正方位値(Dav)を決定する三次元方位値決定手段と、
を備えることを特徴とする移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014509966A JP5678357B2 (ja) | 2013-01-25 | 2014-01-24 | 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013012697 | 2013-01-25 | ||
| JP2013012697 | 2013-01-25 | ||
| JP2014509966A JP5678357B2 (ja) | 2013-01-25 | 2014-01-24 | 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 |
| PCT/JP2014/051562 WO2014115848A1 (ja) | 2013-01-25 | 2014-01-24 | 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5678357B2 true JP5678357B2 (ja) | 2015-03-04 |
| JPWO2014115848A1 JPWO2014115848A1 (ja) | 2017-01-26 |
Family
ID=51227637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014509966A Active JP5678357B2 (ja) | 2013-01-25 | 2014-01-24 | 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20150354958A1 (ja) |
| JP (1) | JP5678357B2 (ja) |
| WO (1) | WO2014115848A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108027408B (zh) * | 2015-07-24 | 2021-05-28 | 联邦科学和工业研究组织 | 测量仪器、系统和磁力梯度仪 |
| JP6603179B2 (ja) * | 2016-06-15 | 2019-11-06 | 株式会社東海理化電機製作所 | シフト装置 |
| US10209078B2 (en) * | 2016-08-31 | 2019-02-19 | Yost Labs Inc. | Local perturbation rejection using time shifting |
| CN112213796B (zh) * | 2020-09-17 | 2021-09-28 | 北京大学 | 一种绝对重力测量方法及绝对重力仪 |
| CN112505793B (zh) * | 2020-12-07 | 2021-11-23 | 北京大学 | 一种绝对重力测量装置 |
| CN114812542A (zh) * | 2021-01-22 | 2022-07-29 | 上海孔叶企业管理中心 | 转向指示方法及装置 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013015435A (ja) * | 2011-07-05 | 2013-01-24 | Aichi Micro Intelligent Corp | 磁気式ジャイロ |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102510997B (zh) * | 2009-09-26 | 2015-01-21 | 阿尔卑斯电气株式会社 | 地磁力检测装置 |
| JP4599502B1 (ja) * | 2010-06-03 | 2010-12-15 | アイチ・マイクロ・インテリジェント株式会社 | 磁気式ジャイロ |
-
2014
- 2014-01-24 JP JP2014509966A patent/JP5678357B2/ja active Active
- 2014-01-24 US US14/763,619 patent/US20150354958A1/en not_active Abandoned
- 2014-01-24 WO PCT/JP2014/051562 patent/WO2014115848A1/ja active Application Filing
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013015435A (ja) * | 2011-07-05 | 2013-01-24 | Aichi Micro Intelligent Corp | 磁気式ジャイロ |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2014115848A1 (ja) | 2017-01-26 |
| WO2014115848A1 (ja) | 2014-07-31 |
| US20150354958A1 (en) | 2015-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5678357B2 (ja) | 回転情報演算方法、回転情報演算プログラム、磁気型ジャイロスコープおよび移動体 | |
| JP5017539B1 (ja) | 地磁気を測定し、利用する応用機器 | |
| US10788324B2 (en) | Method and apparatus for calculation of angular velocity using acceleration sensor and geomagnetic sensor | |
| JP2004286732A5 (ja) | ||
| JPWO2007099599A1 (ja) | 磁気式ジャイロ | |
| CN106643802A (zh) | 一种陀螺仪漂移校正方法及装置 | |
| JP4599502B1 (ja) | 磁気式ジャイロ | |
| JP2008224642A (ja) | 磁気式ジャイロ | |
| JP4890660B2 (ja) | 地磁気検知装置 | |
| US20190212146A1 (en) | Positioning system and positioning method | |
| JP5678748B2 (ja) | 端末装置及び地磁気環境判定プログラム | |
| JP2014219340A (ja) | オフセット補正方法及びオフセット補正装置 | |
| JP5457890B2 (ja) | 方位検知装置 | |
| CN110030991B (zh) | 融合陀螺和磁强计的飞行物高速旋转角运动测量方法 | |
| Kao et al. | Design and analysis of an orientation estimation system using coplanar gyro-free inertial measurement unit and magnetic sensors | |
| WO2012046508A1 (ja) | 移動軌跡検知装置 | |
| JP2006038650A (ja) | 姿勢計測方法、姿勢制御装置、方位計及びコンピュータプログラム | |
| JP6167747B2 (ja) | バイアス算出方法及びバイアス算出装置 | |
| JP2011185864A (ja) | 磁界検知装置 | |
| JP5498209B2 (ja) | 磁界検知装置 | |
| CN105222764B (zh) | 一种对惯性角速度传感器进行地球自转补偿的方法 | |
| JP2009264917A (ja) | 加速度センサ及び地磁気センサを用いて進行向きの転換を判定する携帯端末、プログラム及び方法 | |
| JP5816879B2 (ja) | 磁気式ジャイロ | |
| JP2015148497A (ja) | 磁気型ジャイロスコープおよび三次元方位計 | |
| JP5490576B2 (ja) | 磁界検知装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5678357 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S802 | Written request for registration of partial abandonment of right |
Free format text: JAPANESE INTERMEDIATE CODE: R311802 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |