JP5577088B2 - エンジンの制御装置及び制御方法 - Google Patents
エンジンの制御装置及び制御方法 Download PDFInfo
- Publication number
- JP5577088B2 JP5577088B2 JP2009290545A JP2009290545A JP5577088B2 JP 5577088 B2 JP5577088 B2 JP 5577088B2 JP 2009290545 A JP2009290545 A JP 2009290545A JP 2009290545 A JP2009290545 A JP 2009290545A JP 5577088 B2 JP5577088 B2 JP 5577088B2
- Authority
- JP
- Japan
- Prior art keywords
- instantaneous speed
- ignition
- detected
- instantaneous
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 29
- 238000001514 detection method Methods 0.000 claims description 31
- 230000001174 ascending effect Effects 0.000 claims description 4
- 238000005259 measurement Methods 0.000 claims description 3
- 238000002485 combustion reaction Methods 0.000 description 6
- 238000004880 explosion Methods 0.000 description 5
- 238000007493 shaping process Methods 0.000 description 5
- 238000011144 upstream manufacturing Methods 0.000 description 5
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 101000645318 Drosophila melanogaster Titin Proteins 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
Images








Landscapes
- Ignition Installations For Internal Combustion Engines (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
点火時期被検出部を有しクランク軸と比例回転するロータと、前記点火時期被検出部を検出して点火信号を発生する検出手段と、該検出手段の点火信号に基づき点火装置を作動させる制御手段と、を備えているエンジンの制御方法において、前記ロータのピストンの上死点から180°の範囲内の進角位置に設けられると共に前記点火時期被検出部とは別の複数の瞬時速度被検出部を、前記検出手段で検出することにより、ピストン上昇行程における前記ロータの測定位置の異なる複数の瞬時速度を検出し、前記検出手段により複数の前記瞬時速度被検出部で検出された前記ロータの複数の瞬時速度を用い、これら複数の瞬時速度と前記各瞬時速度被検出部毎に設定された所定の閾値とをそれぞれ比較して、少なくともいずれか一つの前記瞬時速度被検出部の瞬時速度が所定閾値未満の時には前記点火装置を失火させるように点火制御する。
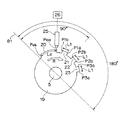
制御方式1は、図2において、点火時期被検出部20に最も近い位置の第1の瞬時速度被検出部21による瞬時速度V1の検出及び第1の閾値V1mを利用する方式である。
制御方式2は、図2の第1、第2の瞬時速度被検出部21、22による瞬時速度V1、V2の検出及び第1、第2の閾値V1m、V2mを利用する方式であり、第1、第2の瞬時速度被検出部21、22により検出された瞬時速度V1、V2のいずれもが対応する第1、第2の閾値V1m、V2mより大きい場合にのみ、点火作動させ、第1、第2の瞬時速度被検出部21、22により検出された瞬時速度V1、V2のすくなくとも一つが対応する第1、第2の閾値V1m、V2mより小さい場合には、失火させる制御である。
制御方式3は、図2の第1、第2、第3の瞬時速度被検出部21、22、23による瞬時速度V1、V2、V3の検出及び第1、第2、第3の閾値V1m、V2m、V3mを利用する方式であり、第1、第2、第3の瞬時速度被検出部21、22、23により検出された瞬時速度V1、V2、V3のいずれもが、対応する第1、第2、第3の閾値V1m、V2m、V3mよりそれぞれ大きい場合に、点火作動させ、つまり、第1、第2、第3の瞬時速度被検出部21、22、23により検出された瞬時速度V1、V2、V3のすくなくとも一つが対応する第1、第2、閾値V1m、V2m、V3mより小さい場合には、失火させる制御である。
上記制御方式1乃至3の他に、次のような制御も採用可能である。
(1)図2の第1、第2、第3の瞬時速度被検出部21、22、23による瞬時速度V1、V2、V3の検出及び第1、第2、第3の閾値V1m、V2m、V3mを利用する方式において、第1、第2、第3の瞬時速度被検出部21、22、23により検出された瞬時速度V1、V2、V3のうち、いずれか二つが対応する第1、第2、第3の閾値V1m、V2m、V3mより小さい時に、失火させる。または、第1、第2、第3の瞬時速度被検出部21、22、23により検出された瞬時速度V1、V2、V3の総てが、対応する第1、第2、第3の閾値V1m、V2m、V3mより小さい時のみ、失火させる。
(1)図6は、ロータ19の変形例であり、ロータ19の外周端に点火時期被検出部20及び瞬時速度被検出部21、22、23として、切欠きを形成している。実質的な機能は前記図2の突起形状の点火時期被検出部20及び瞬時速度被検出部21、22、23と同じであるが、各瞬時速度被検出部21、22、23の回転方向Rの前端縁P1a、P2a、P3aがパルスの立ち下がりとなり、回転方向Rの後端縁P1b、P2b、P3bがパルスの立ち上がりとなる。
11、13 点火プラグ、イグナイタ(点火装置)
14 キックペダル
19 ロータ
20 点火時期被検出部
21、22、23 第1、第2、第3の瞬時速度被検出部
25 ピックアップ(検出手段の一例)
25a 光ピックアップ(検出手段の一例)
26 電子コントロールユニット(制御手段)
Claims (7)
- 点火時期被検出部を有しクランク軸と比例回転するロータと、前記点火時期被検出部を検出して点火信号を発生する検出手段と、該検出手段の点火信号に基づき点火装置を作動させる制御手段と、を備えているエンジンの制御装置において、
前記ロータには、前記点火時期被検出部とは別の複数の瞬時速度被検出部が設けられ、
前記複数の瞬時速度被検出部は、それぞれ瞬時速度を検出するように構成されており、
前記制御手段は、前記検出手段により、ピストンの上死点から180°の範囲内の進角位置に設けられる複数の前記瞬時速度被検出部でそれぞれ検出された前記ロータの複数の瞬時速度を用い、これら複数の瞬時速度と前記各瞬時速度被検出部毎に設定された所定の閾値とをそれぞれ比較して、少なくともいずれか一つの前記瞬時速度被検出部の瞬時速度が所定閾値未満の時には前記点火装置を失火させるように点火制御する、エンジンの制御装置。 - 請求項1に記載のエンジンの制御装置において、
前記制御手段は、前記ピストンの上死点から180°の範囲内の進角位置に設けられる複数の前記瞬時速度被検出部のすべてが、それぞれ所定の閾値以上の瞬時速度を検出した時のみ、前記点火装置を点火させるように点火制御する、エンジンの制御装置。 - 請求項2記載のエンジンの制御装置において、
複数の前記瞬時速度被検出部の所定の前記各閾値は、前記点火時期被検出部に近い側よりも遠い側の前記瞬時速度被検出部の方が高く設定されている、エンジンの制御装置。 - 請求項1乃至3のいずれか一つに記載のエンジンの制御装置において、
前記ピストンの上死点から180°の範囲内の進角位置に設けられた複数の前記瞬時速度被検出部の周方向の長さは、いずれも前記点火時期被検出部の周方向の長さよりも短く設定されている、エンジンの制御装置。 - 請求項1乃至4のいずれか一つに記載のエンジンの制御装置において、
前記制御手段は、前記ピストンの上死点から180°の範囲内の進角位置に設けられた三つの前記瞬時速度被検出部のすべてが、それぞれ所定の閾値以上の瞬時速度を検出した時のみ、前記点火装置を点火させるように点火制御する、エンジンの制御装置。 - 請求項1乃至4のいずれか一つに記載のエンジンの制御装置において、
前記制御手段は、前記ピストンの上死点から180°の範囲内の進角位置に設けられた三つの前記瞬時速度被検出部のうち、いずれか二つが所定の閾値未満の時、または、三つの前記瞬時速度被検出部のすべてが、それぞれ所定の閾値未満の時のみ、前記点火装置を失火させるように点火制御する、エンジンの制御装置。 - 点火時期被検出部を有しクランク軸と比例回転するロータと、前記点火時期被検出部を検出して点火信号を発生する検出手段と、該検出手段の点火信号に基づき点火装置を作動させる制御手段と、を備えているエンジンの制御方法において、
前記ロータのピストンの上死点から180°の範囲内の進角位置に設けられると共に前記点火時期被検出部とは別の複数の瞬時速度被検出部を、前記検出手段で検出することにより、ピストン上昇行程における前記ロータの測定位置の異なる複数の瞬時速度を検出し、
前記検出手段により複数の前記瞬時速度被検出部で検出された前記ロータの複数の瞬時速度を用い、これら複数の瞬時速度と前記各瞬時速度被検出部毎に設定された所定の閾値とをそれぞれ比較して、少なくともいずれか一つの前記瞬時速度被検出部の瞬時速度が所定閾値未満の時には前記点火装置を失火させるように点火制御する、エンジンの制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009290545A JP5577088B2 (ja) | 2009-12-22 | 2009-12-22 | エンジンの制御装置及び制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009290545A JP5577088B2 (ja) | 2009-12-22 | 2009-12-22 | エンジンの制御装置及び制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011132819A JP2011132819A (ja) | 2011-07-07 |
| JP5577088B2 true JP5577088B2 (ja) | 2014-08-20 |
Family
ID=44345838
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009290545A Active JP5577088B2 (ja) | 2009-12-22 | 2009-12-22 | エンジンの制御装置及び制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5577088B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6608670B2 (ja) * | 2015-10-30 | 2019-11-20 | パナソニック ライフソリューションズ池田電機株式会社 | エンジン点火装置 |
| CN108060977B (zh) * | 2018-01-23 | 2024-05-07 | 金城集团有限公司 | 无偏差发动机点火正时装置及其点火正时方法 |
| JP7232065B2 (ja) * | 2019-02-04 | 2023-03-02 | 株式会社Subaru | 回転角検出装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02233837A (ja) * | 1989-03-07 | 1990-09-17 | Nippondenso Co Ltd | 内燃機関用逆転防止装置 |
| JP3443922B2 (ja) * | 1994-03-16 | 2003-09-08 | 株式会社デンソー | 2気筒内燃機関の点火装置 |
| JP4031428B2 (ja) * | 2003-12-24 | 2008-01-09 | 三菱電機株式会社 | 内燃機関の点火制御装置 |
| JP4383914B2 (ja) * | 2004-02-09 | 2009-12-16 | ヤマハモーターエレクトロニクス株式会社 | エンジンのケッチン防止装置 |
| JP2006274998A (ja) * | 2005-03-30 | 2006-10-12 | Yamaha Motor Co Ltd | 内燃機関およびそれを備えた車両 |
-
2009
- 2009-12-22 JP JP2009290545A patent/JP5577088B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011132819A (ja) | 2011-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8818685B2 (en) | Rotation detecting device and rotation detecting method | |
| JP5203514B2 (ja) | 内燃機関の失火検出装置 | |
| JP2006257958A (ja) | カム位相センサ,可変バルブタイミング機構の制御装置及び可変バルブタイミング機構の制御方法 | |
| US7966869B2 (en) | Apparatus and method for detecting cam phase of engine | |
| GB2201247A (en) | Crank angle detecting system for an internal combustion engine | |
| US10309872B2 (en) | Misfire determination apparatus for internal combustion engine | |
| JP2006152971A (ja) | 内燃機関の失火判定装置 | |
| JP5577088B2 (ja) | エンジンの制御装置及び制御方法 | |
| US20180128712A1 (en) | Misfire determination device and misfire determination method of internal combustion engine | |
| JP4873372B2 (ja) | 内燃機関の逆回転判定装置 | |
| US7349796B2 (en) | Apparatus and method for judging a piston position in an engine | |
| EP2151562A2 (en) | Ignition control device of engine, internal combustion engine and motorcycle including the same | |
| JP4027893B2 (ja) | エンジン制御装置 | |
| JP2855969B2 (ja) | 内燃機関の失火検出装置 | |
| JP3536319B2 (ja) | 内燃機関のクランク角判別装置 | |
| JP7139514B2 (ja) | ストラドルドビークルエンジンユニット、及びストラドルドビークル | |
| JPH08165950A (ja) | エンジンの燃焼状態検出装置 | |
| JP2009235963A (ja) | エンジンのクランク角検出方法および装置 | |
| JP2005042589A (ja) | 内燃機関のクランク角検出装置 | |
| JP3900755B2 (ja) | エンジンの燃料着火時期検出方法及びその装置 | |
| JP4281037B2 (ja) | 内燃機関用点火装置 | |
| JP4321449B2 (ja) | 内燃機関の気筒判定装置 | |
| JP4313733B2 (ja) | エンジンの気筒判定装置 | |
| JP6347562B1 (ja) | 内燃機関制御装置 | |
| JP4066955B2 (ja) | 内燃機関のクランク角判別装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120622 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130618 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140701 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140707 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5577088 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |