JP5501565B2 - 光遅延装置 - Google Patents
光遅延装置 Download PDFInfo
- Publication number
- JP5501565B2 JP5501565B2 JP2007534860A JP2007534860A JP5501565B2 JP 5501565 B2 JP5501565 B2 JP 5501565B2 JP 2007534860 A JP2007534860 A JP 2007534860A JP 2007534860 A JP2007534860 A JP 2007534860A JP 5501565 B2 JP5501565 B2 JP 5501565B2
- Authority
- JP
- Japan
- Prior art keywords
- delay
- light beam
- wheel
- prisms
- varying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 53
- 230000010363 phase shift Effects 0.000 claims abstract description 10
- 230000003111 delayed effect Effects 0.000 claims description 10
- 239000000835 fiber Substances 0.000 claims description 8
- 238000000034 method Methods 0.000 claims description 4
- 238000005259 measurement Methods 0.000 claims description 3
- 230000010287 polarization Effects 0.000 claims description 3
- 239000000853 adhesive Substances 0.000 claims description 2
- 230000001070 adhesive effect Effects 0.000 claims description 2
- 230000005670 electromagnetic radiation Effects 0.000 claims description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J9/00—Measuring optical phase difference; Determining degree of coherence; Measuring optical wavelength
- G01J9/02—Measuring optical phase difference; Determining degree of coherence; Measuring optical wavelength by interferometric methods
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/06—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the phase of light
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B5/00—Optical elements other than lenses
- G02B5/12—Reflex reflectors
- G02B5/122—Reflex reflectors cube corner, trihedral or triple reflector type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0205—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0205—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows
- G01J3/0235—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows using means for replacing an element by another, for replacing a filter or a grating
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Optical Communication System (AREA)
- Optical Couplings Of Light Guides (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Optical Elements Other Than Lenses (AREA)
- Mounting And Adjusting Of Optical Elements (AREA)
Description
Claims (27)
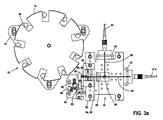
- 光ビームの遅延を変動させる装置において、該装置が、回転可能な第1のホイールと第1の組の複数のプリズムとを含み、
前記第1の組の複数のプリズムが、前記第1のホイールの外周に取り付けられ、前記第1のホイールの軸線の周りで回転するようになっており、且つ前記第1のホイールに対して接するように通る第1の光ビームを再帰反射させるように配置され、それにより前記第1のホイールが回転する際に、前記第1の光ビームに遅延又は位相シフトを生じさせるようになっており、
前記光ビームの遅延を変動させる装置が、第2の組の1つ又は複数のプリズムを更に有し、
前記第2の組の1つ又は複数のプリズムが、第2のホイールの外周に、前記第1の組の複数のプリズムの配置された半径とは異なる半径で配置されて、前記第2のホイールに対して接するように通る第2の光ビームを再帰反射させるように配置され、それにより前記第2のホイールが回転する際に、前記第2の光ビームに遅延又は位相シフトを生じさせるようになっており、
前記第2のホイールが、前記第1のホイールと同じ軸線の周りに回転できるように、前記第1のホイールの上方または下方に設けられている、
光ビームの遅延を変動させる装置。 - 前記第1のホイールの角度位置測定を可能とし、従って、前記第1の光ビームの経路に沿った前記第1の組の複数のプリズムの位置の測定を可能とする、前記第1のホイールに取り付けられたエンコーダを更に含む、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1の組の複数のプリズムが、コーナー・キューブ・プリズムである、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1の組の複数のプリズムが、ポロ・プリズムである、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記光ビームの遅延を変動させる装置が平面ミラーを更に含み、該平面ミラーが前記第1のホイールの軸に対して静止して取り付けられ、且つ前記第1の組の複数のプリズムからそれぞれ出射されるビームに対して実質的に垂直に位置合せされており、それにより出射ビームを、そのビームが前記第1の組の複数のプリズムのそれぞれを最初に通過したときと同じ経路に沿って戻し、その結果、前記第1の組の複数のプリズムのそれぞれを2回通過させるようになっている、請求項1に記載された光ビームの遅延を変動させる装置。
- 2回目の通過後、前記第1の組の複数のプリズムからそれぞれ出射される遅延戻りビームが、重なり合った逆伝播入射ビームから分離される、請求項5に記載された光ビームの遅延を変動させる装置。
- 逆伝播入射ビームを分離させて、遅延戻りビームを、向きを変えて出力ポートに送る部分的に透明なミラーを更に含む、請求項6に記載された光ビームの遅延を変動させる装置。
- 遅延戻りビームの偏光を90°回転させて、前記遅延戻りビームを、向きを変えて出力ポートに送る偏光ビーム・スプリッタを更に含む、請求項6に記載された光ビームの遅延を変動させる装置。
- 逆伝播入射ビームを分離する光サーキュレータを更に含む、請求項6に記載された光ビームの遅延を変動させる装置。
- 前記第1の組の複数のプリズムの各プリズムが、前記第1のホイールの半径に対して0°〜20°の角度を成す主表面又はウィンドウを有する、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1の組の複数のプリズムが動くことによって、光経路の長さを増大又は短縮させるようになっている、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1のホイールの直径が2.54cm(1インチ)から254cm(100インチ)までであり、プリズムの数が2個〜1000個である、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1の光ビームが、コリメートされた電磁放射ビームである、請求項1に記載された光ビームの遅延を変動させる装置。
- 遅延前に、第2の光ビームが前記第1の光ビームから分割されるようになっている、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1の組の複数のプリズムのそれぞれの有する面が、デューティ・サイクルを最大にするために、前記第1のホイールの半径に対して12°の角度を成すように設定されている、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記装置が、制御器を更に含み、前記制御器が、前記第1のホイールが回転する際のビームの振幅変動を補償する較正ルーチンを備える、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記装置が制御器を更に含み、前記制御器が、前記第1のホイールが回転する際に生じるどのような非線形時間遅延も補償する較正ルーチンを備え、前記較正ルーチンが、較正遅延線を用いて既知の時間遅延を参照してルックアップ表を作成し、前記較正ルーチンが、遅延ウィンドウのサイズの変化率も補償するようになっている、請求項1に記載された光ビームの遅延を変動させる装置。
- 入射ビームを遮断して固定光遅延をもたらすプリズムを更に含む、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記第1の組の複数のプリズムがコーナー・キューブ・プリズムであり、各プリズムが1/4インチ〜数インチの直径を有する、請求項1に記載された光ビームの遅延を変動させる装置。
- 保持している前記第1のホイールが、10,000回転/分(RPM)以下の速度で回転する、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記プリズムが、UV硬化性接着剤を用いて前記プリズムの前部を前記第1のホイールのスロットが設けられた面に取り付けることにより、定位置に保持されている、請求項1に記載された光ビームの遅延を変動させる装置。
- パワー変動を是正するフィードバック・プロセスを実行する制御器を更に含む、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記装置が、THz送信器及びTHz受信器と共に使用され、前記THz送信器に印加されるバイアス、又は前記THz受信器のゲインが、変動光パワーを補償するように変調される、請求項1から請求項22までのいずれか1項に記載された光ビームの遅延を変動させる装置。
- 光遅延装置から戻った信号を正規化するアルゴリズムを実行する制御器を更に含む、請求項1に記載された光ビームの遅延を変動させる装置。
- 前記光ビームの遅延を変動させる装置が、ビーム・スプリッタを更に有し、該ビーム・スプリッタは、入射ビームから遅延された入射光を分離して、出力部に向けるようになっている、請求項5に記載された光ビームの遅延を変動させる装置。
- 前記光ビームの遅延を変動させる装置が、ファイバ型サーキュレータを更に有し、該ファイバ型サーキュレータは、入射ビームから遅延された入射光を分離して、出力部に向けるようになっている、請求項5に記載された光ビームの遅延を変動させる装置。
- 前記光ビームの遅延を変動させる装置が、偏光ビーム・スプリッタを更に有し、該偏光ビーム・スプリッタは、入射ビームから遅延された入射光を分離して、出力部に向けるようになっている、請求項5に記載された光ビームの遅延を変動させる装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US61479304P | 2004-09-30 | 2004-09-30 | |
| US60/614,793 | 2004-09-30 | ||
| PCT/US2005/035478 WO2006039645A2 (en) | 2004-09-30 | 2005-09-30 | Optical delay |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008515028A JP2008515028A (ja) | 2008-05-08 |
| JP5501565B2 true JP5501565B2 (ja) | 2014-05-21 |
Family
ID=35744158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007534860A Active JP5501565B2 (ja) | 2004-09-30 | 2005-09-30 | 光遅延装置 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US8390910B2 (ja) |
| EP (1) | EP1794558B1 (ja) |
| JP (1) | JP5501565B2 (ja) |
| KR (1) | KR101354304B1 (ja) |
| CN (1) | CN101048648B (ja) |
| AT (1) | ATE443248T1 (ja) |
| CA (1) | CA2582337C (ja) |
| DE (1) | DE602005016704D1 (ja) |
| HK (1) | HK1115504A1 (ja) |
| WO (1) | WO2006039645A2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7899281B2 (en) * | 2008-07-08 | 2011-03-01 | Honeywell Asca Inc. | Large amplitude high frequency optical delay |
| DE102008050847A1 (de) * | 2008-10-08 | 2010-04-22 | Precitec Optronik Gmbh | Optischer Weglängenmodulator |
| KR101118517B1 (ko) * | 2009-08-04 | 2012-03-12 | 서강대학교산학협력단 | 프리즘을 이용한 광 버퍼 및 이를 이용한 광 버퍼링 시스템 |
| KR101706918B1 (ko) * | 2009-09-01 | 2017-02-27 | 마이크로닉 마이데이타 에이비 | 패턴 발생 시스템 |
| JP5869556B2 (ja) | 2011-03-29 | 2016-02-24 | 浜松ホトニクス株式会社 | テラヘルツ波分光計測装置 |
| WO2012132647A1 (ja) * | 2011-03-29 | 2012-10-04 | 浜松ホトニクス株式会社 | テラヘルツ波分光計測装置 |
| CN102736234B (zh) * | 2012-06-19 | 2013-12-18 | 天津市索维电子技术有限公司 | 带内源性标尺光源的中空角锥棱镜光学延迟线装置 |
| KR101458997B1 (ko) * | 2014-06-09 | 2014-11-07 | 김호환 | 리닉 간섭계의 기준미러 변환장치 |
| JP6407937B2 (ja) * | 2016-10-20 | 2018-10-17 | ファナック株式会社 | ビーム分配器 |
| CN107390361A (zh) * | 2017-08-02 | 2017-11-24 | 华中光电技术研究所(中国船舶重工集团公司第七七研究所) | 高速光学延时线性扫描装置 |
| WO2019159375A1 (ja) * | 2018-02-19 | 2019-08-22 | 株式会社ニコン | 光遅延装置、検査装置、光遅延方法及び検査方法 |
| CN113406788A (zh) * | 2021-07-26 | 2021-09-17 | 长沙安视康医疗科技有限公司 | 一种光程改变装置及光学干涉系统 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1350548A (en) * | 1918-03-01 | 1920-08-24 | Edwin F Flindell | Film-gate and tension means for motion-picture machines |
| US2217236A (en) * | 1937-07-06 | 1940-10-08 | Frank Dumur | Photographic exposure meter |
| US2840632A (en) * | 1952-06-02 | 1958-06-24 | Henry W Parker | Cathode spot television receiving system |
| US2906161A (en) * | 1954-03-29 | 1959-09-29 | Penn Optical & Instr Co | Optical system for alignment inspection |
| US3632871A (en) * | 1969-04-25 | 1972-01-04 | Raytheon Co | Optical scanning device |
| GB1510460A (en) * | 1974-06-10 | 1978-05-10 | Hawker Siddeley Dynamics Ltd | Optical scanning systems |
| US4201222A (en) * | 1977-08-31 | 1980-05-06 | Thomas Haase | Method and apparatus for in vivo measurement of blood gas partial pressures, blood pressure and blood pulse |
| US4320941A (en) * | 1978-11-07 | 1982-03-23 | Pa Management Consultants Limited | Optical compensators for cinematography |
| NL8501805A (nl) * | 1985-06-24 | 1987-01-16 | Philips Nv | Optische aftastinrichting. |
| US5289493A (en) * | 1992-04-21 | 1994-02-22 | Hughes Aircraft Company | Cavity modulated linear chirp laser |
| US6575368B1 (en) * | 1996-01-31 | 2003-06-10 | Psc Scanning, Inc. | Multiple aperture data reader for multi-mode operation |
| US6344846B1 (en) * | 1997-10-27 | 2002-02-05 | Stephen P. Hines | Optical retroreflective remote control |
| FR2817039B1 (fr) * | 2000-11-22 | 2003-06-20 | Nanotec Solution | Dispositif de mesure optique utilisant un interferometre a division d'amplitude, et procede mettant en oeuvre ce dispositif |
| US6407872B1 (en) * | 2001-02-16 | 2002-06-18 | Carl Zeiss, Inc. | Optical path length scanner using moving prisms |
| JP3626109B2 (ja) * | 2001-04-13 | 2005-03-02 | 独立行政法人科学技術振興機構 | 光コヒーレンストモグラフィーにおける回転ミラーによる光遅延発生方法及びその光遅延発生装置 |
| GB2393263B (en) * | 2002-09-18 | 2004-10-27 | Teraview Ltd | Apparatus for varying the path length of a beam of radiation |
| EP1543372B1 (en) * | 2002-09-18 | 2015-07-01 | TeraView Limited | Apparatus for varying the path length of a beam of radiation |
| US6669145B1 (en) * | 2002-12-30 | 2003-12-30 | The Boeing Company | Apparatus, method and system for fluid-motion-powered modulation of a retroreflector for remote position sensing |
-
2005
- 2005-09-30 CA CA2582337A patent/CA2582337C/en active Active
- 2005-09-30 EP EP05803742A patent/EP1794558B1/en active Active
- 2005-09-30 AT AT05803742T patent/ATE443248T1/de not_active IP Right Cessation
- 2005-09-30 DE DE602005016704T patent/DE602005016704D1/de active Active
- 2005-09-30 US US11/576,215 patent/US8390910B2/en active Active
- 2005-09-30 JP JP2007534860A patent/JP5501565B2/ja active Active
- 2005-09-30 KR KR1020077009416A patent/KR101354304B1/ko active IP Right Grant
- 2005-09-30 WO PCT/US2005/035478 patent/WO2006039645A2/en active Application Filing
- 2005-09-30 CN CN2005800332449A patent/CN101048648B/zh active Active
-
2007
- 2007-12-05 HK HK07113289.6A patent/HK1115504A1/xx unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN101048648A (zh) | 2007-10-03 |
| US20080259428A1 (en) | 2008-10-23 |
| ATE443248T1 (de) | 2009-10-15 |
| EP1794558A2 (en) | 2007-06-13 |
| CA2582337A1 (en) | 2006-04-13 |
| WO2006039645A2 (en) | 2006-04-13 |
| US8390910B2 (en) | 2013-03-05 |
| EP1794558B1 (en) | 2009-09-16 |
| JP2008515028A (ja) | 2008-05-08 |
| CN101048648B (zh) | 2010-05-26 |
| KR101354304B1 (ko) | 2014-01-23 |
| CA2582337C (en) | 2015-03-31 |
| KR20070058651A (ko) | 2007-06-08 |
| WO2006039645A3 (en) | 2006-08-24 |
| HK1115504A1 (en) | 2008-11-28 |
| DE602005016704D1 (de) | 2009-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5501565B2 (ja) | 光遅延装置 | |
| JP3169082B2 (ja) | 距離測定装置 | |
| US7239775B2 (en) | High repetition rate, linear, true time optical delay line | |
| JP2005233966A5 (ja) | ||
| US9557221B1 (en) | Interferometer for Fourier transform infrared spectrometry | |
| NL1029114C2 (nl) | Differentiele interferometer met verbeterde cyclische niet-lineariteit. | |
| JP2000514556A (ja) | 干渉計 | |
| CN107884079B (zh) | 单发次超短激光脉冲宽度测量装置及测量方法 | |
| KR101227763B1 (ko) | 물체의 각변위를 간섭계에 의해 측정하기 위한 장치 및 방법 | |
| JP2786247B2 (ja) | 光学帰還アイソレータ | |
| CN1673721A (zh) | 一种共线时间分辨Sagnac干涉仪 | |
| JP4032841B2 (ja) | 二光束干渉計の固定鏡調整方法 | |
| KR100960671B1 (ko) | 회전형 광 지연기 시스템 | |
| KR100757017B1 (ko) | 보상기판을 사용하지 않으면서 단면 코팅된 빔분리기를 사용한 퓨리에 변환 적외선 분광기 | |
| JP3842301B2 (ja) | 干渉測定装置 | |
| JP2014228346A (ja) | テラヘルツ波計測装置及び光路長調整装置 | |
| CN203672491U (zh) | 一种傅立叶变换光谱仪 | |
| WO2023190069A1 (ja) | 光偏向装置及び測距装置 | |
| CN108917655B (zh) | 一种旋转平台及多倍程平面干涉角度测量系统 | |
| CN114136442A (zh) | 基于连续旋转的干涉仪及其工作方法 | |
| JP2001041822A (ja) | 干渉分光光度計 | |
| JP3049809B2 (ja) | 二光束干渉計 | |
| JPH074927A (ja) | レーザー利用測定装置 | |
| Lwin et al. | A velocity interferometer system for any reflector utilizing a short coherence length laser | |
| WO1995014210A1 (fr) | Dispositif de mesure par interferometrie laser |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080331 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101005 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110105 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110113 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110207 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110215 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110307 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110314 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120627 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120704 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120727 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120803 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120827 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130719 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131017 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131024 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131119 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131126 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131219 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140214 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5501565 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |