JP5457080B2 - 電子部品実装装置 - Google Patents
電子部品実装装置 Download PDFInfo
- Publication number
- JP5457080B2 JP5457080B2 JP2009138981A JP2009138981A JP5457080B2 JP 5457080 B2 JP5457080 B2 JP 5457080B2 JP 2009138981 A JP2009138981 A JP 2009138981A JP 2009138981 A JP2009138981 A JP 2009138981A JP 5457080 B2 JP5457080 B2 JP 5457080B2
- Authority
- JP
- Japan
- Prior art keywords
- intake
- exhaust
- electronic component
- exhaust device
- head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Landscapes
- Supply And Installment Of Electrical Components (AREA)
- Manipulator (AREA)
Description
本発明の第一の実施形態について、図1乃至図7に基づいて説明する。図1は、本実施形態たる電子部品実装装置100の斜視図である。以下、図示のように、水平面において互いに直交する二方向をそれぞれX軸方向とY軸方向とし、これらに直交する鉛直方向をZ軸方向というものとする。
(基板搬送手段及び基板保持部)
基板搬送手段103は、図示しない搬送ベルトを備えており、その搬送ベルトにより基板をX軸方向に沿って搬送する。
(部品供給部)
各フィーダーバンク102は、ベースフレーム114のY軸方向両端部のそれぞれにX軸方向に沿った状態で設けられている。各フィーダーバンク102は、X−Y平面に沿った平坦部を備え、当該平坦部の上面に複数の電子部品フィーダー101がX軸方向に沿って羅列して載置装備される(図1では電子部品フィーダー101を一つのみ図示しているが実際にはいくつもの電子部品フィーダー101が並んで装備される)。
(X−Yガントリ)
X−Yガントリ107は、X軸方向にヘッド106の移動を案内するX軸ガイドレール107aと、このX軸ガイドレール107aと共にヘッド106をY軸方向に案内する二本のY軸ガイドレール107bと、X軸方向に沿ってヘッド106を移動させる駆動源であるX軸モータ109と、X軸ガイドレール107aを介してヘッド106をY軸方向に移動させる駆動源であるY軸モータ110とを備えている。そして、各モータ109、110の駆動により、ヘッド106を二本のY軸ガイドレール107bの間となる領域のほぼ全体に搬送することを可能としている。
(ヘッド)
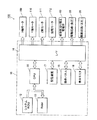
図2は電子部品実装装置100の制御系を示すブロック図である。なお、この図2では一本の吸着ノズル105の制御構成のみを図示しているが、実際には、ヘッド106に搭載された吸着ノズル105ごとに制御構成が設けられている。
(吸排気装置)
図4は吸排気装置20Aの分解斜視図、図5はその中心線方向に沿った断面図であって図5(A)は非作動時、図5(B)は作動時を示す。
(動作制御手段)
図2に示すように、動作制御手段10は、主に、X−Yガントリ107のX軸モータ109、Y軸モータ110、ヘッド106において吸着ノズル105の昇降を行うZ軸モータ111、吸着ノズル105の回転を行う回転モータ112、吸排気装置20Aと吸排気装置20Bの各駆動回路26,26について、所定の制御プログラムに従って各種の処理及び制御を実行するCPU30と、各種の処理及び制御を実行するためのプログラムが格納されたシステムROM12と、各種のデータを格納することで各種の処理の作業領域となるRAM13と、CPU30と各種の機器との接続を図るI/F(インターフェース)14と、基板に実装する電子部品のリストや各電子部品の実装位置及び電子部品の受け取り位置等の実装の動作制御に要する実装データ等が格納される不揮発性の記憶装置17と、各種の設定や操作に要するデータの入力を行うための操作パネル15と、各種設定の内容や必要情報の提示等を行う表示モニタ18とを有している。また、前述した各モータ109〜112はいずれもエンコーダを備えるサーボモータであり、図示しないサーボドライバを介してI/F14と接続されている。
(第一の実施形態の効果)
電子部品実装装置10では、吸着ノズル105の吸気のための負圧発生源である吸排気装置20Aと微弱ブローのための正圧発生源である吸排気装置20Bとが、いずれも、各圧電素子22により可撓部21を変形させて空気室Aから吸排気を行う構造となっている。かかる圧電素子22は板状で薄型化が容易であり、各圧電素子22が取り付けられる可撓部21も膜又は薄板状であることから、吸排気装置20A及び20Bはその全体を薄型化することが可能である。
(第二の実施形態)
図9に基づいて、電子部品実装装置10におけるヘッド106の吸着ノズル105に対する吸排気系統の他の例を第二の実施形態として説明する。なお、かかる吸排気系統以外の構成については前述した電子部品実装装置10の構成と同様なので重複する説明は省略することとする。
(第三の実施形態)
図10から図13に基づいて、電子部品実装装置10におけるヘッド106の吸着ノズル105に対する吸排気系統の他の例を第三の実施形態として説明する。なお、かかる吸排気系統以外の構成については前述した電子部品実装装置10の構成と同様なので重複する説明は省略することとする。
(第四の実施形態)
図15に基づいて、電子部品実装装置10の吸排気系統の他の例を第四の実施形態として説明する。なお、かかる第四の実施形態の吸排気系統は使用する吸排気装置以外は前述した第二の実施形態の吸排気系統と同様なので重複する説明は省略することとする。また、図15では各吸排気装置30Aの駆動回路38の図示は省略している。
(第五の実施形態)
図16に基づいて、電子部品実装装置10の吸排気系統の他の例を第五の実施形態として説明する。なお、かかる第五の実施形態の吸排気系統は使用する吸排気装置以外は前述した第一の実施形態の吸排気系統と同様なので重複する説明は省略することとする。また、図16では各吸排気装置20A、30Aの駆動回路26,38の図示は省略している。
(第六の実施形態)
図17に基づいて、電子部品実装装置10におけるヘッド106の吸着ノズル105に対する吸排気系統の他の例を第六の実施形態として説明する。なお、かかる第六の実施形態は吸排気系統以外は前述した第一の実施形態と同様なので重複する説明は省略することとする。また、図17では吸排気装置20Bの駆動回路26の図示は省略している。
(第七の実施形態)
図18に基づいて、電子部品実装装置10の吸排気系統の他の例を第七の実施形態として説明する。なお、かかる第七の実施形態の吸排気系統は使用する吸排気装置以外は前述した第六の実施形態の吸排気系統と同様なので重複する説明は省略することとする。また、図18では吸排気装置30Bの駆動回路38の図示は省略している。
(その他)
なお、上記各実施形態では、いずれも吸着ノズル105の負圧発生源(吸着圧の供給源)及び正圧発生源(吸着解除圧の供給源)の双方に圧電素子22,32を用いた吸排気装置20A,20B,30A,30Bを採用しているが、負圧発生源又は正圧発生源のいずれか一方のみについて吸排気装置を用いて、他方については従来同様に吸引ポンプや外部の正圧発生源を使用してもよい。即ち、負圧発生源又は正圧発生源のいずれか一方のみについて吸排気装置を用いた場合であっても、すくなともその一方について使用されていたエアーチューブを不要とすることができるので、程度の差異はあるが、前述と同様の技術的効果を得ることが可能である。
20A,20B,30A,30B 吸排気装置
21 振動板(可撓部)
22,32 圧電素子
23 基板(構造体)
24,28 排気口
25,40 吸気口
26,38 駆動回路
31 ダイヤフラム(可撓部)
33 構造体
35 排気流路
37 吸気流路
65 負圧発生装置
100 電子部品実装装置
101 電子部品フィーダー(部品供給部)
102 フィーダーバンク(部品供給部)
104 基板保持部
105 吸着ノズル
106 ヘッド
107 X−Yガントリ(移動機構)
A 空気室
Claims (8)
- 電子部品の実装が行われる基板を保持する基板保持部と、
実装される電子部品を供給する部品供給部と、
前記基板に搭載する電子部品を吸着する昇降可能な吸着ノズルを備えたヘッドと、
前記基板保持部と前記部品供給部との間の前記ヘッドの移動を行う移動機構とを備える電子部品実装装置において、
可撓性を有する膜又は薄板からなる可撓部と、前記可撓部に貼設された圧電素子と、前記可撓部と共に空気室を構成する構造体とを有する吸排気装置を前記ヘッドに搭載し、
当該吸排気装置を前記吸着ノズルによる吸着を行うための負圧発生源としたことを特徴とする電子部品実装装置。 - 前記吸排気装置の排気による空気の流動から負圧を得る負圧発生装置を備えることを特徴とする請求項1記載の電子部品実装装置。
- 前記吸着ノズルの吸着を解除するための正圧発生源としての前記吸排気装置も前記ヘッドに搭載したことを特徴とする請求項1又は2記載の電子部品実装装置。
- 前記吸排気装置の吸気口と排気口とを前記吸着ノズルに対して切り換え接続する吸排気切り換え手段を備え、前記吸着ノズルの負圧発生源と正圧発生源としての機能を一つの吸排気装置が果たすことを特徴とする請求項3記載の電子部品実装装置。
- 電子部品の実装が行われる基板を保持する基板保持部と、
実装される電子部品を供給する部品供給部と、
前記基板に搭載する電子部品を吸着する昇降可能な吸着ノズルを備えたヘッドと、
前記基板保持部と前記部品供給部との間の前記ヘッドの移動を行う移動機構とを備える電子部品実装装置において、
可撓性を有する膜又は薄板からなる可撓部と、前記可撓部に貼設された圧電素子と、前記可撓部と共に空気室を構成する構造体とを有する吸排気装置を前記ヘッドに搭載し、
当該吸排気装置を前記吸着ノズルの吸着を解除するための正圧発生源としたことを特徴とする電子部品実装装置。 - 前記吸排気装置の構造体に、前記空気室から外部に抜ける排気流路と当該排気流路に交差して合流する吸気流路とを設け、
前記吸排気装置が、前記圧電素子により前記空気室の容積を周期的に増減させて吸排気を行うことを特徴とする請求項1から5のいずれか一項に記載の電子部品実装装置。 - 前記吸排気装置の可撓部に複数の前記圧電素子を円周に沿って配置し、
前記可撓部又は構造体の前記円周の中央となる位置に吸気口を設けると共に前記可撓部又は構造体の前記円周の外周となる位置に排気口を設け、
前記各圧電素子を円周に沿って順番に駆動させることで前記可撓部と構造体との隙間領域を回転移動させる駆動回路を備え、
前記隙間領域の回転移動による遠心力で排気口から排気を行うことを特徴とする請求項1から5のいずれか一項に記載の電子部品実装装置。 - 前記圧電素子の駆動周波数又は印加電圧を調節して吸気圧又は排気圧の制御を行う制御手段を備えることを特徴とする請求項1から7のいずれか一項に記載の電子部品実装装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009138981A JP5457080B2 (ja) | 2009-06-10 | 2009-06-10 | 電子部品実装装置 |
| CN201010199459.0A CN101925294B (zh) | 2009-06-10 | 2010-06-10 | 电子部件安装装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009138981A JP5457080B2 (ja) | 2009-06-10 | 2009-06-10 | 電子部品実装装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010287650A JP2010287650A (ja) | 2010-12-24 |
| JP5457080B2 true JP5457080B2 (ja) | 2014-04-02 |
Family
ID=43339809
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009138981A Active JP5457080B2 (ja) | 2009-06-10 | 2009-06-10 | 電子部品実装装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5457080B2 (ja) |
| CN (1) | CN101925294B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103339380B (zh) * | 2011-10-11 | 2015-11-25 | 株式会社村田制作所 | 流体控制装置、流体控制装置的调节方法 |
| JP5903858B2 (ja) * | 2011-12-06 | 2016-04-13 | セイコーエプソン株式会社 | 電子部品搬送装置及び電子部品検査装置 |
| JP5952129B2 (ja) * | 2012-08-10 | 2016-07-13 | ヤマハ発動機株式会社 | 部品搬送用ヘッド、部品吸着用ノズル及び部品実装装置 |
| CN106134310B (zh) * | 2014-02-07 | 2019-12-10 | 环球仪器公司 | 一种包含泵和电机的拾放头 |
| JP6969873B2 (ja) * | 2017-01-17 | 2021-11-24 | シンフォニアテクノロジー株式会社 | マウンタ用エア制御装置 |
| JP7001425B2 (ja) * | 2017-10-26 | 2022-01-19 | シンフォニアテクノロジー株式会社 | マウンタ用エア制御装置 |
| WO2020010002A1 (en) * | 2018-07-03 | 2020-01-09 | Siemens Healthcare Diagnostics Inc. | A miniature piezoelectric air pump to generate pulsation-free air flow for pipette apparatus proximity sensing |
| CN111434595A (zh) * | 2019-01-15 | 2020-07-21 | 智仁画像科技有限公司 | 极小物体的单层化装置 |
| DE102019110913A1 (de) * | 2019-04-26 | 2020-10-29 | J. Schmalz Gmbh | Flächensauggreifer |
| JP2023043366A (ja) * | 2021-09-16 | 2023-03-29 | Smc株式会社 | 正負圧力切替回路 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3128354B2 (ja) * | 1992-10-22 | 2001-01-29 | 三洋電機株式会社 | 電子部品装着装置 |
| JP2001150377A (ja) * | 1999-11-25 | 2001-06-05 | Sony Corp | 部品吸着器及び部品吸着器を有する部品吸着装置 |
| JP2004006553A (ja) * | 2002-06-03 | 2004-01-08 | Matsushita Electric Ind Co Ltd | 対象物当接装置、対象物当接方法、電子部品装着装置および電子部品装着方法 |
| JP3111869U (ja) * | 2005-04-13 | 2005-07-28 | アイコクアルファ株式会社 | 荷役物運搬機のアタッチメント |
| JP4320350B2 (ja) * | 2006-08-23 | 2009-08-26 | Tdk株式会社 | 導電性部材供給装置及び導電性部材供給方法 |
| JP5104097B2 (ja) * | 2007-07-27 | 2012-12-19 | 株式会社村田製作所 | 流体移送装置 |
| EP2202815B1 (en) * | 2007-10-16 | 2019-04-10 | Murata Manufacturing Co. Ltd. | Vibration device, and piezoelectric pump |
-
2009
- 2009-06-10 JP JP2009138981A patent/JP5457080B2/ja active Active
-
2010
- 2010-06-10 CN CN201010199459.0A patent/CN101925294B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101925294A (zh) | 2010-12-22 |
| CN101925294B (zh) | 2015-05-20 |
| JP2010287650A (ja) | 2010-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5457080B2 (ja) | 電子部品実装装置 | |
| JP5343954B2 (ja) | 基板搬送用ハンド、それを備えた基板搬送装置および基板搬送方法 | |
| JP5610330B2 (ja) | コンベアの搬送性能を強化するシステム | |
| JP2006143468A (ja) | 板材分離装置 | |
| JP2008235472A (ja) | 基板処理装置 | |
| JP2011100895A (ja) | 非接触保持装置及び移載装置 | |
| JP2012175037A (ja) | ダイボンダ及び半導体製造方法 | |
| JP2010143733A (ja) | 基板ハンドリングシステム及び基板ハンドリング方法 | |
| JP2021187598A (ja) | 電子部品の処理装置 | |
| JP2009188052A (ja) | 電子部品移載装置 | |
| JP2015153837A (ja) | ワーク用チャック装置及びワーク貼り合わせ機並びにワーク貼り合わせ方法 | |
| WO2015075832A1 (ja) | ボンディング装置およびボンディング方法 | |
| JP2012186505A (ja) | 部品供給装置 | |
| CN108190517A (zh) | 平板类工件对位传送装置及方法 | |
| WO2017163887A1 (ja) | 基板浮上搬送装置 | |
| JP2008300437A (ja) | ピックアップ装置およびピックアップ方法 | |
| JP5640634B2 (ja) | シート取出装置 | |
| JP5620172B2 (ja) | 基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法 | |
| JP2008021820A (ja) | 部品実装ヘッドおよびエアフィルタユニット | |
| JP2015103795A (ja) | ボンディング装置 | |
| JP2011029240A (ja) | 基板搬送装置および基板貼り合わせ装置 | |
| JP6236561B1 (ja) | ワーク貼り合わせ装置及びワーク貼り合わせ方法 | |
| KR102416236B1 (ko) | 패널 고정용 다단 척 및 이를 이용한 디스플레이 라미네이션 장치 | |
| JP6165372B1 (ja) | ワーク搬送装置及びワーク搬送方法 | |
| JP2009252890A (ja) | 部品供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120601 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5457080 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |