JP5408936B2 - 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム - Google Patents
自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム Download PDFInfo
- Publication number
- JP5408936B2 JP5408936B2 JP2008235786A JP2008235786A JP5408936B2 JP 5408936 B2 JP5408936 B2 JP 5408936B2 JP 2008235786 A JP2008235786 A JP 2008235786A JP 2008235786 A JP2008235786 A JP 2008235786A JP 5408936 B2 JP5408936 B2 JP 5408936B2
- Authority
- JP
- Japan
- Prior art keywords
- focus
- range
- signal
- focus adjustment
- focusing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/282—Autofocusing of zoom lenses
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/631—Graphical user interfaces [GUI] specially adapted for controlling image capture or setting capture parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/633—Control of cameras or camera modules by using electronic viewfinders for displaying additional information relating to control or operation of the camera
- H04N23/635—Region indicators; Field of view indicators
Description
また、本発明の他の一側面としての自動焦点調節装置の制御方法は、被写体像を電気信号に変換した出力信号から高周波成分を抽出して焦点信号を生成する抽出ステップと、フォーカスレンズを移動させて前記焦点信号を順次取得するスキャン動作を行い、前記取得された焦点信号に基づいて前記フォーカスレンズの移動を制御することにより焦点調節動作を行う制御ステップとを有し、前記焦点調節動作の開始が指示されてから撮影動作が指示されるまでの間、前記制御ステップにおいて繰り返し行う前記焦点調節動作中に、前記抽出ステップで生成される前記焦点信号に基づいて合焦可否を判定する判定ステップと、前記判定ステップで合焦可能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を第1の範囲に設定するステップと、前記判定ステップで合焦不能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を前記第1の範囲よりも広く全域よりも狭い第2の範囲に設定するステップを有する。
また、本発明の他の一側面としての焦点調節制御プログラムは、被写体像を電気信号に変換した出力信号から高周波成分を抽出して焦点信号を生成する抽出ステップと、フォーカスレンズを移動させて前記焦点信号を順次取得するスキャン動作を行い、前記取得された焦点信号に基づいて前記フォーカスレンズの移動を制御することにより焦点調節動作を行う制御ステップとをコンピュータに実行させる焦点調節制御プログラムであって、前記焦点調節動作の開始が指示されてから撮影動作が指示されるまでの間、前記制御ステップにおいて繰り返し行う前記焦点調節動作中に、前記抽出ステップで生成される前記焦点信号に基づいて合焦可否を判定する判定ステップと、前記判定ステップで合焦可能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を第1の範囲に設定するステップと、前記判定ステップで合焦不能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を前記第1の範囲よりも広く全域よりも狭い第2の範囲に設定するステップを有する。
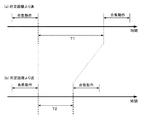
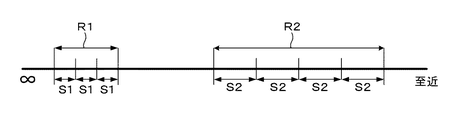
S502からS507までの説明において、T1>T2、R1<R2、S1<S2の関係を有するものとする。つまり、CPU119の制御により、以下の条件を満たすように設定を行う。
・スキャン範囲Rは、被写体までの距離が短い場合に比して当該距離が長い場合に狭い。
・スキャンステップSは、被写体までの距離が短い場合に比して当該距離が長い場合に小さい。
また、撮影処理(図3参照)、本露光用AF処理(図4参照)、サーボAF処理(図5参照)、および本露光処理(図3参照)の各処理手順に対応する各プログラム(サブプログラム)とを含む所定のプログラムもプログラムメモリ125に格納されている。
前述の説明では、本露光用AFの結果得られた、被写体までの距離に応じて合焦動作の時間間隔、スキャン範囲、スキャンステップを変えたが、これらを合焦可否の判定結果に応じて変えても良い。このように構成した場合の動作を以下に説明する。
他方、S1004では今回の合焦動作におけるスキャン範囲RをCPU119がR4に設定し、次のS1005では今回の合焦動作におけるスキャンステップSをS4に設定する。
・スキャン範囲Rは、合焦可否の判定結果がOKとされた場合に比して該判定結果がNGとされた場合に広く設定する。
・スキャンステップSは、合焦可否の判定結果がOKとされた場合に比して該判定結果がNGとされた場合に小さく設定する。
また、撮影処理(図3参照)、本露光用AF処理(図9参照)、サーボAF処理(図10参照)、および本露光処理(図8参照)の各処理手順に対応する各プログラム(サブプログラム)とを含む所定のプログラムもプログラムメモリ125に格納されている。
103、104 駆動部
112 光電変換部(撮像素子)
115、116 抽出部
119、125、126 制御部
Claims (6)
- 被写体像を電気信号に変換する光電変換手段と、
前記光電変換手段の出力信号から高周波成分を抽出して焦点信号を生成する抽出手段と、
フォーカスレンズを移動させて前記焦点信号を順次取得するスキャン動作を行い、前記取得された焦点信号に基づいて前記フォーカスレンズの移動を制御することにより焦点調節動作を行う制御手段とを有し、
前記焦点調節動作の開始が指示されてから撮影動作が指示されるまでの間、前記制御手段が繰り返し行う前記焦点調節動作中に、
前記制御手段は、前記焦点信号に基づいて合焦可否を判定し、合焦可能と判定した場合には次の焦点調節動作における前記フォーカスレンズの移動範囲を第1の範囲に設定し、合焦不能と判定した場合には次の焦点調節動作における前記フォーカスレンズの移動範囲を前記第1の範囲よりも広く全域よりも狭い第2の範囲に設定することを特徴とする自動焦点調節装置。 - 前記制御手段は、前記合焦可否の判定結果が合焦可能とされた場合、前記フォーカスレンズを、前記焦点信号の最大値を取得した位置に移動し、前記合焦可否の判定結果が合焦不能とされた場合、前記フォーカスレンズを所定の位置に移動するよう制御することを特徴とする、請求項1に記載の自動焦点調節装置。
- 前記制御手段は、次の焦点調節動作において前記焦点信号を取得する度に移動制御される前記フォーカスレンズの移動量を、前記合焦可否の判定結果に基づいて変更することを特徴とする、請求項1又は2に記載の自動焦点調節装置。
- 前記制御手段は、次の焦点調節動作において前記焦点信号を取得する度に移動制御される前記フォーカスレンズの移動量であるスキャンステップを、前記合焦可否の判定結果が合焦可能とされた場合に比して該判定結果が合焦不能とされた場合に小さく設定することを特徴とする、請求項3に記載の自動焦点調節装置。
- 被写体像を電気信号に変換した出力信号から高周波成分を抽出して焦点信号を生成する抽出ステップと、
フォーカスレンズを移動させて前記焦点信号を順次取得するスキャン動作を行い、前記取得された焦点信号に基づいて前記フォーカスレンズの移動を制御することにより焦点調節動作を行う制御ステップとを有し、
前記焦点調節動作の開始が指示されてから撮影動作が指示されるまでの間、前記制御ステップにおいて繰り返し行う前記焦点調節動作中に、前記抽出ステップで生成される前記焦点信号に基づいて合焦可否を判定する判定ステップと、前記判定ステップで合焦可能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を第1の範囲に設定するステップと、前記判定ステップで合焦不能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を前記第1の範囲よりも広く全域よりも狭い第2の範囲に設定するステップを有することを特徴とする自動焦点調節装置の制御方法。 - 被写体像を電気信号に変換した出力信号から高周波成分を抽出して焦点信号を生成する抽出ステップと、フォーカスレンズを移動させて前記焦点信号を順次取得するスキャン動作を行い、前記取得された焦点信号に基づいて前記フォーカスレンズの移動を制御することにより焦点調節動作を行う制御ステップとをコンピュータに実行させる焦点調節制御プログラムであって、
前記焦点調節動作の開始が指示されてから撮影動作が指示されるまでの間、前記制御ステップにおいて繰り返し行う前記焦点調節動作中に、前記抽出ステップで生成される前記焦点信号に基づいて合焦可否を判定する判定ステップと、前記判定ステップで合焦可能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を第1の範囲に設定するステップと、前記判定ステップで合焦不能と判定された場合に次の焦点調節動作における前記フォーカスレンズの移動範囲を前記第1の範囲よりも広く全域よりも狭い第2の範囲に設定するステップを有することを特徴とする焦点調節制御プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008235786A JP5408936B2 (ja) | 2008-09-13 | 2008-09-13 | 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム |
| CN200910169438.1A CN101672974B (zh) | 2008-09-13 | 2009-09-09 | 自动聚焦装置及其控制方法 |
| CN201310088659.2A CN103207441B (zh) | 2008-09-13 | 2009-09-09 | 自动聚焦装置及其控制方法 |
| US12/558,358 US8521015B2 (en) | 2008-09-13 | 2009-09-11 | Autofocus apparatus and method for controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008235786A JP5408936B2 (ja) | 2008-09-13 | 2008-09-13 | 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010066737A JP2010066737A (ja) | 2010-03-25 |
| JP2010066737A5 JP2010066737A5 (ja) | 2011-09-15 |
| JP5408936B2 true JP5408936B2 (ja) | 2014-02-05 |
Family
ID=42007312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008235786A Active JP5408936B2 (ja) | 2008-09-13 | 2008-09-13 | 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8521015B2 (ja) |
| JP (1) | JP5408936B2 (ja) |
| CN (2) | CN101672974B (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5408936B2 (ja) * | 2008-09-13 | 2014-02-05 | キヤノン株式会社 | 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム |
| JP5621325B2 (ja) * | 2010-05-28 | 2014-11-12 | ソニー株式会社 | 焦点制御装置、焦点制御方法、レンズ装置、フォーカスレンズ駆動方法、および、プログラム |
| KR101710633B1 (ko) * | 2011-08-05 | 2017-02-27 | 삼성전자주식회사 | 자동 초점 조절 방법, 자동 초점 조절 장치, 및 이를 포함하는 디지털 촬영장치 |
| JP5325966B2 (ja) * | 2011-11-25 | 2013-10-23 | オリンパス株式会社 | 撮像装置及び撮像方法 |
| US9784577B2 (en) * | 2012-03-16 | 2017-10-10 | Lg Innotek Co., Ltd. | Measuring distance from object by using size of pattern projected onto object |
| CN103424978A (zh) * | 2012-05-15 | 2013-12-04 | 鸿富锦精密工业(深圳)有限公司 | 相机模组测试系统及方法 |
| US9621780B2 (en) | 2012-10-04 | 2017-04-11 | Nvidia Corporation | Method and system of curve fitting for common focus measures |
| US9392158B2 (en) * | 2012-10-04 | 2016-07-12 | Nvidia Corporation | Method and system for intelligent dynamic autofocus search |
| CN102891966B (zh) * | 2012-10-29 | 2015-07-01 | 珠海全志科技股份有限公司 | 数码成像设备的对焦方法及装置 |
| JP6489817B2 (ja) * | 2014-12-10 | 2019-03-27 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| CN104796616A (zh) * | 2015-04-27 | 2015-07-22 | 惠州Tcl移动通信有限公司 | 一种基于移动终端距离传感器的对焦方法及对焦系统 |
| JP6474693B2 (ja) * | 2015-06-19 | 2019-02-27 | オリンパス株式会社 | 焦点検出装置、焦点検出方法、および記録媒体 |
| CN105872363A (zh) * | 2016-03-28 | 2016-08-17 | 广东欧珀移动通信有限公司 | 人脸对焦清晰度的调整方法及调整装置 |
| JP6752681B2 (ja) * | 2016-10-19 | 2020-09-09 | キヤノン株式会社 | 表示制御装置、表示制御装置の制御方法及びプログラム並びに記憶媒体 |
| CN106773100A (zh) * | 2017-01-09 | 2017-05-31 | 成都曙光光纤网络有限责任公司 | 一种适用于透射式太赫兹波系统的自动对焦装置和方法 |
| CN107748428A (zh) * | 2017-10-18 | 2018-03-02 | 歌尔股份有限公司 | 屏幕检测自动对焦方法及装置 |
| DE102018114388A1 (de) * | 2018-06-15 | 2019-12-19 | Valeo Schalter Und Sensoren Gmbh | Verfahren zur Steuerung einer Antriebseinrichtung eines Mikroschwingspiegels, Steuervorrichtung und Umlenkspiegeleinrichtung |
| JP7346135B2 (ja) * | 2019-07-30 | 2023-09-19 | キヤノン株式会社 | 電子機器、電子機器の制御方法、プログラムおよび記憶媒体 |
| CN113542590A (zh) * | 2020-06-01 | 2021-10-22 | 杭州美盛红外光电技术有限公司 | 自动聚焦装置和聚焦方法 |
| CN113358056B (zh) * | 2021-05-31 | 2023-06-27 | 深圳中科飞测科技股份有限公司 | 工件表面形貌的扫描方法、扫描系统及存储介质 |
| CN115442512A (zh) * | 2021-06-04 | 2022-12-06 | 北京小米移动软件有限公司 | 对焦控制方法、装置、终端及存储介质 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR0147572B1 (ko) * | 1992-10-09 | 1998-09-15 | 김광호 | 자동 줌잉을 위한 피사체 추적방법 및 그 장치 |
| JPH11326744A (ja) * | 1998-05-18 | 1999-11-26 | Minolta Co Ltd | オートフォーカスカメラ |
| JP3851027B2 (ja) * | 1999-08-27 | 2006-11-29 | 株式会社リコー | オートフォーカス装置およびカメラ |
| JP4689051B2 (ja) * | 2001-01-19 | 2011-05-25 | キヤノン株式会社 | 焦点調節装置 |
| JP3797543B2 (ja) * | 2001-10-26 | 2006-07-19 | 富士写真フイルム株式会社 | 自動焦点調節装置 |
| JP2003156679A (ja) * | 2001-11-22 | 2003-05-30 | Minolta Co Ltd | 焦点検出装置 |
| JP4374826B2 (ja) * | 2002-04-26 | 2009-12-02 | 株式会社ニコン | カメラ |
| JP2003329916A (ja) * | 2002-05-14 | 2003-11-19 | Canon Inc | 撮像装置、撮像方法、記録媒体及びプログラム |
| JP4674472B2 (ja) * | 2005-01-18 | 2011-04-20 | 株式会社ニコン | デジタルカメラ |
| JP4555255B2 (ja) | 2006-05-15 | 2010-09-29 | 株式会社リコー | 自動合焦装置、デジタルカメラ、携帯情報入力装置、合焦位置検出方法、およびコンピュータが読取可能な記録媒体 |
| JP5408936B2 (ja) * | 2008-09-13 | 2014-02-05 | キヤノン株式会社 | 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム |
| JP5376986B2 (ja) * | 2009-02-17 | 2013-12-25 | キヤノン株式会社 | 焦点調節装置、及び焦点調節方法 |
-
2008
- 2008-09-13 JP JP2008235786A patent/JP5408936B2/ja active Active
-
2009
- 2009-09-09 CN CN200910169438.1A patent/CN101672974B/zh not_active Expired - Fee Related
- 2009-09-09 CN CN201310088659.2A patent/CN103207441B/zh active Active
- 2009-09-11 US US12/558,358 patent/US8521015B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8521015B2 (en) | 2013-08-27 |
| US20100067890A1 (en) | 2010-03-18 |
| CN101672974A (zh) | 2010-03-17 |
| CN101672974B (zh) | 2014-09-24 |
| CN103207441A (zh) | 2013-07-17 |
| JP2010066737A (ja) | 2010-03-25 |
| CN103207441B (zh) | 2016-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5408936B2 (ja) | 自動焦点調節装置、自動焦点調節装置の制御方法及び焦点調節制御プログラム | |
| JP3728241B2 (ja) | 焦点調節装置、撮像装置、合焦方法、プログラム、及び記憶媒体 | |
| JP5789098B2 (ja) | 焦点検出装置およびその制御方法 | |
| JP2008015274A (ja) | デジタルカメラ | |
| JP5002412B2 (ja) | 撮像装置 | |
| JP2015094925A (ja) | 焦点調節装置、焦点調節方法およびプログラム、並びに焦点調節装置を有する撮像装置 | |
| JP5213813B2 (ja) | 撮像装置及び撮像装置の制御方法 | |
| JP2011248159A (ja) | 撮像装置、撮像システム、撮像装置の制御方法およびプログラム | |
| JP5095519B2 (ja) | 撮像装置及び撮像方法 | |
| CN107231513B (zh) | 摄像系统、摄像设备、镜头装置及其控制方法 | |
| JP6727453B2 (ja) | 撮像装置、撮像装置の制御方法、及び撮像装置の制御プログラム | |
| JP5787634B2 (ja) | 撮像装置 | |
| JP6234016B2 (ja) | 焦点調節装置、撮像装置及びその制御方法 | |
| JP2016057463A (ja) | 焦点調節装置及びその制御方法 | |
| JP2010028281A (ja) | カメラ、騒音除去方法および騒音除去プログラム | |
| WO2019181024A1 (ja) | 撮像装置、撮像方法、及びプログラム | |
| JP4555255B2 (ja) | 自動合焦装置、デジタルカメラ、携帯情報入力装置、合焦位置検出方法、およびコンピュータが読取可能な記録媒体 | |
| JP6105917B2 (ja) | 焦点調節装置及び方法、及び撮像装置 | |
| CN113728613B (zh) | 成像元件、摄像装置、成像元件的工作方法及程序 | |
| JP6653790B2 (ja) | 撮像装置、撮像方法、及びプログラム | |
| JP5868163B2 (ja) | 撮像装置、撮像装置の制御方法、プログラム | |
| JP4574726B2 (ja) | 撮像装置および自動合焦制御方法 | |
| JP6808501B2 (ja) | 撮像装置、及び撮像装置の制御方法 | |
| JP5907610B2 (ja) | 光学機器 | |
| JP2006157604A (ja) | カメラ装置及び自動撮影制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110802 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120321 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131008 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131105 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5408936 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |