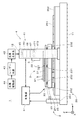
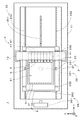
図1は本発明の一の実施の形態に係るパターン描画装置1の側面図であり、図2はパターン描画装置1の平面図である。パターン描画装置1は、基板9上の感光材料に光ビームを照射して当該感光材料に配線等のパターンを描画するパターン描画装置である。
図1および図2に示すように、パターン描画装置1は、(+Z)側の主面91(以下、「上面91」という。)上に感光材料の層が形成された基板9を保持する基板保持部3、基台11上に設けられて基板保持部3をZ方向に垂直なX方向およびY方向に移動する保持部移動機構2、基板保持部3および保持部移動機構2を跨ぐように基台11に固定されるフレーム12、フレーム12に取り付けられて基板9上の感光材料に変調された光を照射する光照射部4、光照射部4の(−Y)側にて基板9の主面91のZ方向の高さを検出する複数の(実際には、後述の光学ヘッド41と同数の)距離検出部5、並びに、保持部移動機構2や光照射部4等の各構成を制御する制御部6を備える。
基板保持部3は、基板9が載置されるステージ31、ステージ31を回転可能に支持する支持プレート33、および、支持プレート33上において、基板9の上面91に垂直な回転軸321を中心としてステージ31を回転するステージ回転機構32を備える。
保持部移動機構2は、基板保持部3を図1および図2中のX方向(以下、「副走査方向」という。)に移動する副走査機構23、副走査機構23を介して支持プレート33を支持するベースプレート24、並びに、基板保持部3をベースプレート24と共にX方向に垂直なY方向(以下、「主走査方向」という。)に連続的に移動する主走査機構25を備える。パターン描画装置1では、保持部移動機構2により、基板9の上面91に平行な主走査方向および副走査方向に基板保持部3が移動される。
図1および図2に示すように、副走査機構23は、支持プレート33の下側(すなわち、(−Z)側)において、ステージ31の主面に平行、かつ、主走査方向に垂直な副走査方向に伸びるリニアモータ231、並びに、リニアモータ231の(+Y)側および(−Y)側において副走査方向に伸びる一対のリニアガイド232を備える。主走査機構25は、ベースプレート24の下側において、ステージ31の主面に平行な主走査方向に伸びるリニアモータ251、並びに、リニアモータ251の(+X)側および(−X)側において主走査方向に伸びる一対のエアスライダ252を備える。
保持部移動機構2は、ステージ31の主走査方向の位置を測定する位置測定部26をさらに備える。レーザー測長器である位置測定部26は、レーザー光源、リニア干渉系およびレシーバを有する測定部本体261、並びに、ベースプレート24の(−Y)側の側面に取り付けられるミラー262を有し、基台11上に取り付けられる測定部本体261のレーザー光源から出射されたレーザー光はリニア干渉系を介してミラー262に入射し、ミラー262からの反射光が測定部本体261に入射する。測定部本体261では、反射光と、リニア干渉系にて参照光として利用される元のレーザー光の一部との干渉光がレシーバにより受光される。そして、レシーバからの出力(すなわち、反射光と参照光との干渉後の強度変化)に基づいて専用の演算回路により、ベースプレート24上のステージ31の主走査方向における位置がリアルタイムにて精度よく求められる。
図2に示すように、光照射部4は、副走査方向に沿って等ピッチにて配列されてフレーム12に取り付けられる複数(本実施の形態では、8つ)の光学ヘッド41を備える。また、光照射部4は、図1に示すように、各光学ヘッド41に接続される光源光学系42、並びに、レーザー光を出射するレーザー光源43および光源駆動部44を備える。レーザー光源43は固体レーザーであり、光源駆動部44が駆動されることにより、レーザー光源43からレーザー光が出射され、光源光学系42を介して光学ヘッド41へと導かれる。
各光学ヘッド41は、レーザー光源43からの光を下方に向けて出射する出射部45、出射部45からの光を反射して空間光変調器46へと導く光学系451、光学系451を介して照射された出射部45からの光を変調しつつ反射する空間光変調器46、および、空間光変調器46からの変調された光を基板9の上面91に設けられた感光材料上へと導く投影光学系47を備える。
空間光変調器46は、出射部45を介して照射されたレーザー光源43からの光を基板9の上面91へと導く回折格子型の複数の光変調素子を備える。光変調素子は半導体装置製造技術を利用して製造され、格子の深さを変更することができる回折格子となっている。回折格子型の光変調素子としては、例えば、GLV(Grating Light Valve:グレーチング・ライト・バルブ)(シリコン・ライト・マシーンズの登録商標)が知られている。
図1に示す光照射部4では、レーザー光源43からの光が光源光学系42により線状光(光束断面が線状の光)とされ、出射部45を介して空間光変調器46のライン状に配列された複数の光変調素子上に照射される。光変調素子は、入射光の反射光を0次光(正反射光)として導出する状態と、1次回折光(さらには、高次回折光)として導出する状態との間にて遷移可能とされる。光変調素子から出射される0次光は投影光学系47へと導かれ、非0次回折光(主として1次回折光((+1)次回折光および(−1)次回折光))は投影光学系47とは異なる方向へと導かれる。なお、迷光となることを防止するために1次回折光は図示を省略する遮光部により遮光される。
光変調素子からの0次光は、投影光学系47を介して基板9の上面91へと導かれ、これにより、基板9の上面91上においてX方向(すなわち、副走査方向)に沿っておよそ直線状に並ぶ複数の領域のそれぞれに変調された光(光の強度がおよそ0とされる場合を含む。)が照射される。投影光学系47には、対物レンズ472を光軸に沿って移動するアクチュエータ(例えば、ピエゾアクチュエータ)を有するフォーカス機構471が設けられており、フォーカス機構471により光変調素子からのビーム状の光(光ビーム)の合焦位置が基板9の主面91上に合わせられる。なお、光変調素子からの1次回折光が基板9の上面91へと導かれ、0次光が遮光部により遮光されてもよい。
図1および図2に示すパターン描画装置1では、保持部移動機構2の主走査機構25により主走査方向に一定の速度にて移動される基板9に対し、光照射部4の光変調素子から変調された光が照射される。換言すれば、主走査機構25は、複数の光学ヘッド41を一体的に、かつ、基板9に対して相対的に連続移動して、複数の光学ヘッド41からの光が照射される複数の照射領域を、基板9に対して相対的にかつ連続的に主走査方向へと移動する移動機構となっている。
図3は、距離検出部5および制御部6の構成を示す図である。制御部6は、位置測定部26に接続されるとともに、ステージ31の主走査方向の位置を示す情報を受け付ける受付部66を有する。受付部66はタイミング信号発生部65に接続されており、タイミング信号発生部65では、入力されるステージ31の位置情報に基づいて、後述のパルス入力ON信号、距離検出パルス信号および駆動開始パルス信号(後述の図7参照)、並びに、ステージ31の移動方向を示す信号が生成される。
距離検出部5は、距離検出用の光を出射するレーザーダイオード光源51(以下、「LD光源51」という。)、および、LD光源51に接続されたLD駆動部52を有する。LD駆動部52は、制御部6の投光制御部61に接続され、投光制御部61の光量調整部611の制御によりLD光源51から所定の周期およびデューティ比にてパルス光が出射される。LD光源51からの光はレンズ531およびミラー532を介して基板9上に照射される。以下の説明では、LD光源51からの光が照射される基板9上の領域を「検出領域」という。なお、LD光源51からの光は、基板9上の感光材料を感光させない波長帯および強度となっている。
当該光の検出領域における反射光は、ミラー533にて反射されてレンズ534に取り込まれ、ミラー535を介して受光部であるラインセンサ54上に照射される。ラインセンサ54は、例えば、所定の方向に複数の画素が並ぶCCD(Charge Coupled Device)イメージセンサ、または、CMOS(Complementary Metal Oxide Semiconductor)イメージセンサであり、ラインセンサ54により基板9からの反射光の光量分布(ラインセンサ54の画素の配列方向における光量分布)が取得される。このとき、ラインセンサ54における出力が適切な大きさとなるように、LD光源51からのパルス光のデューティ比が設定されている。
ラインセンサ54は受光制御部55に接続されており、ラインセンサ54からのアナログ出力信号は受光制御部55内にてA/D変換されて、デジタルの受光出力データが制御部6の検出信号処理部62に出力される。実際には、受光制御部55により、ラインセンサ54からの受光出力データの出力タイミングが一定の周期となるように制御される。また、ラインセンサ54からの出力タイミングに同期して、後述の処理にて参照されるラインセンサ54の有効な画素範囲を示す有効画素範囲信号が、検出信号処理部62に出力される。
検出信号処理部62の重心位置算出部621では、タイミング信号発生部65から一定の周期にて入力される距離検出パルス信号に同期して、距離検出パルス信号の周期よりも短い周期にて順次入力される受光出力データがラッチされ、当該受光出力データが示す光量分布のピーク部分の重心位置(すなわち、光量分布において光量が急激に増大する位置と急激に減少する位置との間の部分における重心位置)が求められる。このとき、有効画素範囲信号に基づいて、ラインセンサ54の有効な画素範囲外の光量は無視される。そして、求められた重心位置は、距離検出パルス信号の発生時における基板9上の検出領域の主走査方向の位置(または、ステージ31の主走査方向の位置)に対応付けられて図示省略のメモリに記憶される。
ここで、ラインセンサ54の画素の配列方向における重心位置は、距離検出部5の所定位置(例えば、ラインセンサ54)と主面91上の検出領域との間のZ方向の距離(以下、「検出距離」という。)に依存するため、以下の説明では、検出信号処理部62の機能が距離検出部5の一部であるものとみなして、距離検出パルス信号の距離検出部5への入力により、基板9の主面91に垂直な方向に関して距離検出部5と主面91との間の検出距離が取得されるものとする。
本実施の形態では、複数の画素が並ぶラインセンサ54の中央が参照位置とされており、光学ヘッド41からの光の照射領域が、重心位置が求められた際の検出領域の位置(基板9に対する相対的な位置)へと到達する直前に、タイミング信号発生部65から駆動開始パルス信号が検出信号処理部62に入力され、検出信号処理部62の移動距離算出部622において、ラインセンサ54の画素の配列方向における参照位置と当該重心位置との差(距離)が求められる。そして、当該重心位置の取得時における検出領域の位置において、光学ヘッド41の光変調素子からの光の合焦位置を基板9の主面91上に合わせる(すなわち、光変調素子の像を主面91上に形成する)ための対物レンズ472の目標位置が、当該差に基づいて求められる。
アクチュエータ駆動制御部63では、対物レンズ472を当該目標位置へと移動するための指令値が、フォーカス機構471のアクチュエータ473に出力される。これにより、対物レンズ472が当該目標位置に配置され、光学ヘッド41からの光の合焦位置が、当該重心位置の取得時における基板9上の検出領域の位置にて主面91上に合わされる。このように、フォーカス機構471の駆動は、駆動開始パルス信号に同期して行われるため、以下の説明では、検出信号処理部62およびアクチュエータ駆動制御部63の機能がフォーカス機構471の一部であるものとみなして、駆動開始パルス信号のフォーカス機構471への入力により、対物レンズ472を目標位置へと移動するフォーカス調整が行われるものとする。
以上のように、図3の制御部6では、投光制御部61、検出信号処理部62およびアクチュエータ駆動制御部63により、パターン描画時における自動フォーカス調整に係る制御機能であるAF制御部64が実現されている。
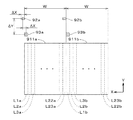
図4は、基板9の主面91上における照射領域および検出領域を示す図である。図4では、2つの光学ヘッド41の照射領域92a,92b(図4中にて平行斜線を付して示す。検出領域93a,93bにおいて同様。)、および、2つの距離検出部5の検出領域93a,93bのみを図示している。図4に示すように、各光学ヘッド41の照射領域92a,92bの中心位置は、当該光学ヘッド41の(−Y)側に設けられる距離検出部5の検出領域93a,93bの中心位置から主走査方向にΔY、副走査方向にΔXだけ離れている。また、照射領域92a,92bの副走査方向の幅もΔXとなっている。以下の説明では、照射領域92a,92bと検出領域93a,93bとの間の主走査方向の中心間距離を「照射−検出間距離」という。
ここで、既述のように、図2のパターン描画装置1では、複数の光学ヘッド41が副走査方向に配列されており、基板9上の描画対象範囲をX方向に幅Wにて等分割した複数の分割領域911a,911b(図4中にて細い実線にて示す。)に対して複数の光学ヘッド41によりそれぞれパターンが描画される。なお、図4では、2つの分割領域911a,911bのみを図示しているが、実際には複数の光学ヘッド41と同数の分割領域に対して、当該複数の光学ヘッド41によりそれぞれパターンが描画される。
また、照射領域の1回の主走査方向への相対移動(すなわち、主走査)において、各光学ヘッド41により分割領域911a,911b内の線状領域(図4中にて破線の矩形にて示し、符号L1a,L2a等を付している。)にパターンが描画され、線状領域へのパターンの描画が完了する毎に、照射領域の副走査方向への相対移動(すなわち、(−X)方向への副走査)、および、直前の主走査時とは反対の進行方向への照射領域の相対移動を順に行って当該線状領域に隣接する他の線状領域へのパターンの描画が行われる。すなわち、副走査機構23がステージ31を副走査方向に間欠移動しつつ、主走査機構25がステージ31上の基板9を主走査方向に往復移動することにより、往路および復路のそれぞれにおいて主走査方向に伸びる線状領域にパターンが描画される。
実際のパターン描画装置1では、1つの分割領域911a,911b(例えば、X方向の幅Wが92ミリメートル(mm))内に23個の線状領域が隙間なく配列され、各照射領域92a,92b(X方向の幅ΔXが4mmとされる。)の主走査が23回行われることにより、分割領域911a,911bの全体にパターンが描画される(すなわち、基板9の描画範囲の全体にパターンが描画される)。なお、線状領域はストライプとも呼ばれる。
図4では、照射領域92aに対応する光学ヘッド41によりパターンの描画が行われる23個の線状領域に(+X)側から(−X)方向に向かって符号L1a,L2a,L3a,・・・,L22a,L23aを付し、照射領域92bに対応する光学ヘッド41によりパターンの描画が行われる23個の線状領域に(+X)側から(−X)方向に向かって符号L1b,L2b,L3b,・・・,L22b,L23bを付している。
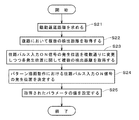
次に、基板9上にパターンを描画する動作の流れについて図5を参照して説明する。実際には、パターン描画動作の事前処理として、タイミング信号発生部65における各種タイミング信号の発生に係る特定のパラメータの値(後述の駆動遅延距離、並びに、往路パルス入力ON信号および復路パルス入力ON信号の発生位置)を決定する処理が行われる。当該事前処理については後述する。
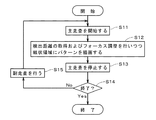
基板9上にパターンを描画する際には、まず、ステージ31上の基板9が所定の描画開始位置に配置される。具体的には、図4に示すように、各光学ヘッド41の照射領域92a,92b、および、各距離検出部5の検出領域93a,93bが分割領域911a,911bの(+Y)側に配置されるとともに、検出領域93a,93bが、X方向に関して各分割領域911a,911b内の最も(+X)側の線状領域L1a,L1bと同じ位置に配置される。そして、基板9の(+Y)方向への移動を開始することにより、検出領域93a,93bが線状領域L1a,L1bに向かって主走査を開始する(ステップS11)。
図6は、照射領域および検出領域の基板9に対する相対移動を説明するための図であり、図6では、1つの照射領域92および検出領域93(平行斜線を付して示す。)、並びに、照射領域92および検出領域93が通過する一部の線状領域L1〜L3(図6中にて破線の矩形にて示す。)のみを図示している。また、図6では、照射領域92および検出領域93と、線状領域L1〜L3との相対位置の変化を符号A1〜A8を付す複数の段階にて示している。
図6中の段階A1に示すように、検出領域93(の中心)が線状領域L1の(+Y)側の端部に到達すると、検出距離の取得に係る制御(すなわち、距離検出パルス信号の入力、および、当該信号の入力による検出距離の取得に係る処理)が開始される(ステップS12)。実際には、検出領域93が線状領域L1上を通過している間中(図6中の段階A2参照)、検出領域93が主走査方向に一定のピッチ(例えば、4mmのピッチであり、以下、「設定ピッチ」という。)だけ移動する毎に検出距離が取得される。これにより、線状領域L1における基板9のうねり状態が取得される。
図6中の段階A3のように、検出領域93が線状領域L1の(−Y)側の端部に到達すると、検出距離の取得に係る制御が終了される。そして、主走査方向に関して照射領域92(の中心)が線状領域L1の(−Y)側の端部と同じ位置となる図6中の段階A4を経て、図6中の段階A5に示すように、照射領域92および検出領域93が線状領域L1〜L3よりも(−Y)側の所定位置に到達すると、基板9の主走査方向への移動が停止される(ステップS13)。なお、照射領域92および検出領域93の最初の主走査では、線状領域L1に対する複数の検出距離の取得のみが行われ、光学ヘッド41の制御(フォーカス調整を含む。)は行われない。
制御部6では、次の主走査が行われることが確認されると(ステップS14)、基板9が線状領域の幅(すなわち、照射領域の幅ΔX)だけ(+X)方向に移動する(ステップS15)。これにより、図6中の段階A6に示すように、副走査方向に関して、照射領域92が線状領域L1と同じ位置に配置され、検出領域93が線状領域L1の(−X)側に隣接する線状領域L2と同じ位置に配置される。そして、基板9の(−Y)方向への移動を開始することにより、照射領域92および検出領域93がそれぞれ線状領域L1,L2に向かって主走査を開始する(ステップS11)。
図6中の段階A7に示すように、検出領域93よりも(+Y)側に配置される照射領域92が線状領域L1の(−Y)側の端部に到達すると、光学ヘッド41における光の照射制御が開始される。実際には、照射領域92が線状領域L1の(−Y)側の端部に到達する直前に、フォーカス調整に係る制御(すなわち、駆動開始パルス信号の入力、および、当該信号の入力によるフォーカス調整に係る処理)が開始されており、照射領域92が当該端部に到達した際に、最初のフォーカス調整が完了する。光学ヘッド41におけるフォーカス調整は、直前の主走査時に取得された複数の検出距離に基づいて、照射領域92が主走査方向に設定ピッチだけ移動する毎に行われる。
その後、図6中の段階A8に示すように、検出領域93が線状領域L2の(−Y)側の端部に到達すると、検出距離の取得に係る制御が開始され、線状領域L2に対する複数の検出距離が取得される。このようにして、検出距離の取得およびフォーカス調整を行いつつ、線状領域L1にパターンが描画される(ステップS12)。なお、光学ヘッド41における光の照射制御(空間光変調器46の制御)は、設定ピッチよりも十分に短い距離毎に行われる。
照射領域92が線状領域L1の(+Y)側の端部に到達すると、照射制御およびフォーカス調整に係る制御が終了され、検出領域93が線状領域L2の(+Y)側の端部に到達すると、検出距離の取得に係る制御が終了される。照射領域92および検出領域93は、(+Y)方向にさらに相対移動し、線状領域L1〜L3よりも(+Y)側の所定位置に到達すると、基板9の主走査方向への移動が停止される(ステップS13)。
次の主走査が行われることが確認されると(ステップS14)、基板9が線状領域の幅だけ(+X)方向に移動し(ステップS15)、副走査方向に関して、照射領域92が線状領域L2と同じ位置に配置され、検出領域93が線状領域L2の(−X)側に隣接する線状領域L3と同じ位置に配置される。そして、基板9の(+Y)方向への移動が開始され(ステップS11)、線状領域L3に対する複数の検出距離の取得、および、直前の主走査時に線状領域L2に対して取得された複数の検出距離に基づく複数回のフォーカス調整を行いつつ、線状領域L2にパターンが描画される(ステップS12)。照射領域92および検出領域93が、線状領域L1〜L3よりも(−Y)側に到達すると、基板9の主走査方向への移動が停止される(ステップS13)。
以上のように、パターン描画装置1では、上記ステップS15,S11〜S13の処理が繰り返されることにより(ステップS14)、一の主走査による線状領域へのパターンの描画が完了する毎に、ステージ31の副走査方向への移動、および、直前の主走査時とは反対の進行方向へのステージ31の移動を順に行って当該線状領域に平行な他の線状領域へのパターンの描画が行われるとともに、各主走査時に、複数の検出距離の取得、および、直前の主走査時に取得された複数の検出距離に基づく複数回のフォーカス調整が行われる。そして、全ての線状領域へのパターンの描画が完了すると、パターン描画装置1におけるパターンの描画動作が完了する。
ここで、各主走査時に、複数の検出距離の取得および複数回のフォーカス調整を行う際の制御部6によるタイミング制御について説明する。図7は、制御部6によるタイミング制御を説明するための図である。図7中の最上段はY方向の位置を示し、上から2段目(Y軸の下側)は、往路におけるパルス入力ON信号(以下、「往路パルス入力ON信号」ともいう。)を示し、上から3段目は往路における距離検出パルス信号を示す。図7中の上から4段目は往路における駆動開始パルス信号を示し、上から5段目は往路における駆動完了パルス信号を示している。また、図7中の上から6段目は、復路におけるパルス入力ON信号(以下、「復路パルス入力ON信号」ともいう。)を示し、上から7段目は復路における距離検出パルス信号を示す。図7中の上から8段目は復路における駆動開始パルス信号を示し、最下段は復路における駆動完了パルス信号を示している。上記の駆動完了パルス信号は、対物レンズ472の目標位置への移動の完了を示す信号であり、図3のAF制御部64により生成される。
検出領域93が照射領域92よりも先行する往路では、ステージ31が(+Y)方向に移動して、ステージ31の所定部分が図7中の最上段にて符号α1を付す主走査方向の位置へと到達すると、タイミング信号発生部65(図3参照)において、図7中の上から2段目に示すように、往路パルス入力ON信号が発生する(立ち上がる)。続いて、往路パルス入力ON信号の発生位置から設定ピッチT1(設定ピッチT1以外の距離であってもよい。)だけステージ31が移動すると、図7中の上から3段目に示すように、最初の距離検出パルス信号が発生し、検出距離が取得される。このとき、ステージ31は図7中の最上段にて符号α2を付す位置に到達し、図6の段階A1に示すように、検出領域93が線状領域の(+Y)側の端部上に位置する。その後、基板9が設定ピッチT1だけ移動する毎に距離検出パルス信号がAF制御部64に繰り返し入力され、検出距離が取得される。このように、タイミング信号発生部65では、往路パルス入力ON信号の発生をトリガとして位置測定部26の出力に基づいて一定の設定ピッチT1にて距離検出パルス信号が繰り返し発生される。
ここで、パターン描画装置1では、後述する事前処理において、フォーカス機構471への駆動開始パルス信号の入力から、当該入力に対応するフォーカス調整の完了(すなわち、対物レンズ472の目標位置への移動の完了)までの時間に相当するステージ31の移動距離(すなわち、照射領域92および検出領域93の基板9に対する相対的な移動距離)が駆動遅延距離T2として設定されている。
タイミング信号発生部65では、図7中の上から3段目および4段目に示すように、照射領域92と検出領域93との間の主走査方向の照射−検出間距離T3から駆動遅延距離T2を減じた距離だけ、各距離検出パルス信号の発生位置から進行方向前側((+Y)側)の位置にステージ31が移動した際に、駆動開始パルス信号が発生される。図3のAF制御部64では、駆動開始パルス信号の入力により対物レンズ472の目標位置が求められるとともに、対物レンズ472を当該目標位置へと移動するための指令値がアクチュエータ473に出力され、対物レンズ472の移動が行われる。そして、図7中の上から3段目および5段目に示すように、各距離検出パルス信号の発生位置から基板9が(+Y)側に照射−検出間距離T3だけ移動した際に(または、駆動開始パルス信号の発生位置から駆動遅延距離T2だけ移動した際に)、対物レンズ472の目標位置への移動(すなわち、フォーカス調整)が完了する。
既述のように、往路では、検出領域93が照射領域92よりも先行しており、主面91上において照射領域92と検出領域93とは主走査方向に照射−検出間距離T3だけ離れているため、主走査方向のみに着目した場合に、各距離検出パルス信号の発生時における基板9上の検出領域93の位置(すなわち、検出距離が取得される基板9上の位置であり、以下、「検出位置」という。)と、当該距離検出パルス信号に対応する駆動開始パルス信号によるフォーカス調整が完了する際の基板9上の照射領域92の位置とが一致することとなる。なお、図7中の最上段では、往路における最初の駆動開始パルス信号によるフォーカス調整が完了する際のステージ31の位置を符号α3を付す矢印にて示している。
一方で、照射領域92が検出領域93よりも先行する復路では、ステージ31が(−Y)方向に移動して、図7中の最上段にて符号β1を付す主走査方向の位置へと到達すると、タイミング信号発生部65において、図7中の上から6段目(下から4段目)に示すように、復路パルス入力ON信号が発生する(立ち上がる)。続いて、復路パルス入力ON信号の発生位置から設定ピッチT1だけ基板9が移動すると、図7中の上から8段目(下から2段目)に示すように、最初の駆動開始パルス信号が発生し、その後、基板9が設定ピッチT1だけ移動する毎に駆動開始パルス信号がAF制御部64に繰り返し入力される。このように、タイミング信号発生部65では、復路パルス入力ON信号の発生をトリガとして位置測定部26の出力に基づいて一定の設定ピッチT1にて駆動開始パルス信号が繰り返し発生される。
そして、図7中の最下段に示すように、各駆動開始パルス信号の発生位置から基板9が(−Y)側に駆動遅延距離T2だけ移動した際に、当該駆動開始パルス信号に対応する対物レンズ472の目標位置への移動が(原則として)完了する。例えば、復路における最初の駆動開始パルス信号によるフォーカス調整が完了する際の照射領域92の位置は、図6の段階A7に示すように線状領域の(−Y)側の端部となり、このときのステージ31の位置を図7中の最上段にて符号β2を付す矢印にて示している。
また、タイミング信号発生部65では、図7中の上から7段目および8段目(下から2段目および3段目)に示すように、照射−検出間距離T3に駆動遅延距離T2を加えた距離だけ、各駆動開始パルス信号の発生位置から進行方向前側((−Y)側)の位置に基板9が移動した際に、距離検出パルス信号が発生する。したがって、照射領域92が検出領域93よりも照射−検出間距離T3だけ先行する復路においても、主走査方向のみに着目した場合に、各駆動開始パルス信号によるフォーカス調整が完了する際の基板9上の照射領域92の位置と、当該駆動開始パルス信号に対応する距離検出パルス信号の発生時における基板9上の検出領域93の位置(検出位置)とが一致することとなる。なお、図7中の最上段では、復路における最初の距離検出パルス信号の発生時におけるステージ31の位置を符号β3を付す矢印にて示している。
パターン描画装置1では、主走査方向に関して、往路における複数の検出距離の基板9上の検出位置(複数の検出位置)と、復路における複数の検出距離の検出位置とが近似するように、後述する事前処理において、往路におけるパルス信号入力の能動化を示す往路パルス入力ON信号、および、復路におけるパルス信号入力の能動化を示す復路パルス入力ON信号の双方の主走査方向における発生位置が設定されている。これにより、往路および復路のそれぞれにて線状領域にパターンを描画する際に、直前の主走査にて当該線状領域に対して取得された各検出距離の検出位置にて、当該検出距離を用いたフォーカス調整を行うことが可能となる。このように、パターン描画装置1では、駆動遅延距離T2、並びに、往路および復路におけるパルス入力ON信号の発生位置の設定のみで、各主走査において、取得済みの検出距離の検出位置にて当該検出距離を用いたフォーカス調整が可能となる。なお、設定ピッチT1は操作者により任意に定められるものであり、照射−検出間距離T3はパターン描画装置1の設計により予め決められるものである。
次に、パターン描画動作の事前処理として、駆動遅延距離、並びに、往路および復路におけるパルス入力ON信号の発生位置を決定する処理について、図8を参照して説明する。図8のステップS21の処理は、主としてパターン描画装置1の組立時や使用現場への設置時に行われるものであり、図8のステップS22〜S25の処理は、ステップS21の処理が行われる場合の他、主走査機構25におけるステージ31の移動速度を変更する場合にも行われるものである。なお、図8の処理がパターン描画装置1の使用における定期的なキャリブレーション等として行われてもよい。
パターン描画動作の事前処理では、まず、駆動遅延距離が求められる(ステップS21)。具体的には、パターン描画装置1において、対物レンズ472の変位を測定する変位計(例えば、レーザー変位計)を一時的に設け、フォーカス機構471に駆動開始パルス信号を入力した後、任意に決定された対物レンズ472の目標位置への移動が完了するまでの時間が測定される。上記測定は、対物レンズ472の移動前の位置と目標位置との様々な組合せ(ただし、通常、基板9のうねりは緩やかであるため、移動前の位置と目標位置との差は比較的小さくされる。)に対して行われ、測定された時間の平均値等の代表値が駆動遅延時間として求められる。そして、パターン描画動作におけるステージ31の主走査方向への移動速度に駆動遅延時間を乗じることにより、フォーカス機構471への駆動開始パルス信号の入力からフォーカス調整の完了までの駆動遅延時間に相当するステージ31の移動距離が駆動遅延距離T2として決定される。既述のように、ステップS21の処理は、パターン描画装置1の組立時や使用現場への設置時に主として行われる。
駆動遅延距離が決定されると、操作者により復路パルス入力ON信号の発生位置が任意に決定される。そして、ステージ31が復路の開始位置へと配置された後、(−Y)方向への移動が開始され、ステージ31が当該発生位置へと到達した際に、タイミング信号発生部65にて復路パルス入力ON信号が発生する。図7中の上から6ないし9段目(下から1ないし4段目)を参照して説明したように、復路パルス入力ON信号の発生後、ステージ31が設定ピッチT1(予め定められている。)だけ移動する毎に駆動開始パルス信号が発生する。また、照射−検出間距離T3に駆動遅延距離T2を加えた距離だけ、各駆動開始パルス信号の発生位置から進行方向前側((−Y)側)の位置にステージ31が移動した際に、距離検出パルス信号が発生する。これにより、復路に関して任意のパルス入力ON信号の発生位置にて一の線状領域(以下、「特定線状領域」という。)に対する複数の検出距離が取得される(ステップS22)。
続いて、復路における複数の検出距離を取得した際の複数の距離検出パルス信号の発生位置のうち最も(−Y)側の発生位置から設定ピッチT1だけ(−Y)方向に離れた位置が基準位置として決定される。そして、設定ピッチT1よりも小さい予め設定された距離(例えば、設定ピッチT1の1/30以上1/3以下の距離)の1、2、3、・・・、M(ただし、Mは任意の正の整数)倍だけ、基準位置から(+Y)方向および(−Y)方向のそれぞれに離れた位置、および、基準位置が往路パルス入力ON信号の発生位置の複数の候補として決定される。なお、発生位置の複数の候補の間隔は、設定ピッチT1よりも小さい幅であるならば、必ずしも一定でなくてもよい。
制御部6では、往路パルス入力ON信号の発生位置の複数の候補のうちの1つが選択される。そして、ステップS22の処理にて複数の検出距離が取得された線状領域(すなわち、特定線状領域)の(+Y)側に検出領域93が配置された後、ステージ31の(+Y)方向への移動が開始され、ステージ31が選択された発生位置へと到達した際に、タイミング信号発生部65にて往路パルス入力ON信号が発生する。図7中の上から2ないし5段目を参照して説明したように、往路パルス入力ON信号の発生後、ステージ31が設定ピッチT1だけ移動する毎に距離検出パルス信号が発生する。これにより、往路パルス入力ON信号の選択された発生位置に基づく複数の検出距離が取得される。パターン描画装置1では、往路パルス入力ON信号の発生位置の複数の候補のそれぞれに対して上記動作が行われる。このようにして、往路パルス入力ON信号の発生位置を設定ピッチT1よりも小さい間隔にて複数通りに変更して、往路パルス入力ON信号の各発生位置に関して、同一の特定線状領域に対する複数の検出距離が取得される(ステップS23)。
制御部6では、往路パルス入力ON信号の各発生位置に関する複数の検出距離と、ステップS22の処理にて取得された復路における複数の検出距離との差の絶対値の和(差の二乗和等であってもよい。)が求められる。詳細には、往路および復路のそれぞれにおける複数の検出距離の個数がK(Kは1よりも大きい正の整数)である場合に、往路における複数の検出距離うちL(Lは1以上K以下の正の整数)番目の距離検出パルス信号にて取得された検出距離と、復路における複数の検出距離のうち((K+1)−L)番目に取得された検出距離との差の絶対値が求められ、これらの値の和が評価値として取得される。そして、往路パルス入力ON信号の複数の発生位置(複数の候補)と、当該複数の発生位置に対する複数の評価値とを変数とする2次の近似式が求められ、評価値が最小となる発生位置が当該近似式に基づいて特定される。当該発生位置は、実際のパターン描画動作での往路におけるパルス入力ON信号の発生位置として決定される(ステップS24)。
評価値が最小となる往路パルス入力ON信号の発生位置は、当該発生位置に関して特定線状領域に対して取得される複数の検出距離と、ステップS22の処理にて取得された復路における複数の検出距離とが最も近似すると考えられるものであるため、当該発生位置にて往路パルス入力ON信号を発生させた際における複数の検出距離の検出位置と、ステップS22の処理の際における復路パルス入力ON信号での複数の検出距離の検出位置とが近似(一致を含む。)することとなる。なお、距離検出パルス信号の発生から、ラインセンサ54(図3参照)からの受光出力データが実際にラッチされるまでの遅れ時間の影響等、往路および復路における各種動作タイミングのずれにより、通常、ステップS24にて決定される往路パルス入力ON信号の発生位置は、上記基準位置からずれたものとなる。
以上のようにして、駆動遅延距離T2、並びに、往路パルス入力ON信号、および、復路パルス入力ON信号の主走査方向における発生位置(すなわち、各種タイミング信号の発生に係る特定のパラメータの値)が決定されると、これらのパラメータの値はタイミング信号発生部65に設定され、パターン描画動作の事前処理が完了する(ステップS25)。実際のパターン描画動作では、これらのパラメータの値に基づいてタイミング信号発生部65から各種タイミング信号が出力されることにより、各主走査にて線状領域にパターンを描画する際に、直前の主走査にて当該線状領域に対して取得された各検出距離の検出位置にて、当該検出距離を用いたフォーカス調整を行うことが可能となる。なお、実際の基板9上の描画対象範囲に合わせて、往路および復路におけるパルス入力ON信号の発生位置が同じ距離だけ主走査方向にシフトされてもよい。
ところで、仮に、駆動遅延距離T2を考慮せず、往路において各距離検出パルス信号の発生位置から照射−検出間距離T3だけ進行方向前側の位置にて駆動開始パルス信号を発生させた場合、各距離検出パルス信号に対応する駆動開始パルス信号によるフォーカス調整が完了する際の照射領域92の位置が、当該距離検出パルス信号の発生時における検出領域93の位置から(+Y)側に駆動遅延距離T2だけずれてしまう。また、復路において各駆動開始パルス信号の発生位置から照射−検出間距離T3だけ進行方向前側の位置にて距離検出パルス信号を発生させた場合、各駆動開始パルス信号によるフォーカス調整が完了する際の照射領域92の位置が、当該駆動開始パルス信号に対応する距離検出パルス信号の発生時における検出領域93の位置から(−Y)側に駆動遅延距離T2だけずれてしまう。
これに対し、パターン描画装置1では、検出領域93が照射領域92よりも先行する往路において、往路パルス入力ON信号の発生をトリガとして、設定ピッチT1にて距離検出パルス信号を繰り返し発生し、照射−検出間距離T3から駆動遅延距離T2を減じた距離だけ各距離検出パルス信号の発生位置から進行方向前側の位置にて駆動開始パルス信号を発生することにより、主走査方向に関して各距離検出パルス信号の発生時における検出領域93の位置と、当該距離検出パルス信号に対応する駆動開始パルス信号によるフォーカス調整が完了する際の照射領域92の位置とを一致させることができる。また、照射領域92が検出領域93よりも先行する復路において、復路パルス入力ON信号の発生をトリガとして、設定ピッチT1にて駆動開始パルス信号を繰り返し発生し、照射−検出間距離T3に駆動遅延距離T2を加えた距離だけ各駆動開始パルス信号の発生位置から進行方向前側の位置にて距離検出パルス信号を発生することにより、主走査方向に関して各駆動開始パルス信号によるフォーカス調整が完了する際の照射領域92の位置と、当該駆動開始パルス信号に対応する距離検出パルス信号の発生時における検出領域93の位置とを一致させることができる。
また、パターン描画装置1では、主走査方向に関して往路における複数の検出距離の検出位置と、復路における複数の検出距離の検出位置とが近似するように、往路および復路におけるパルス入力ON信号の主走査方向の発生位置が制御部6に設定される。これにより、各主走査において、直前の主走査にて取得される複数の検出距離を用いて複数回のフォーカス調整が行われる際に、光学ヘッド41からの光ビームの合焦位置を基板9のうねりに従って主面91上に精度よく合わせることが実現される。その結果、パターン描画装置1では、往路および復路の双方にて高精度なパターン描画を行って、基板9上に高精細なパターンを精度よく、かつ、短時間にて描画することが可能となる。
さらに、パターン描画装置1では、図8のステップS22〜S25の処理において、復路に関して任意に決定されたパルス入力ON信号の発生位置にて特定線状領域に対する複数の検出距離が取得され、往路に関して、パルス入力ON信号の発生位置を設定ピッチT1よりも小さい間隔にて複数通りに変更して、往路パルス入力ON信号の各発生位置にて特定線状領域に対する複数の検出距離が取得される。そして、往路パルス入力ON信号の各発生位置での複数の検出距離と、それぞれ対応する復路の複数の検出距離との差を示す評価値を求め、当該評価値と往路パルス入力ON信号の発生位置との関係を示す関数(近似式)に基づいて、実際のパターン描画動作時の往路におけるパルス入力ON信号の発生位置が決定される。これにより、往路および復路の検出距離の検出位置が相互に近似する往路および復路のパルス入力ON信号の発生位置を容易に、かつ、精度よく決定することができる。
ここで、基板9上における感光材料の種類を変更する際には、当該感光材料に合わせた露光量(単位面積当たりに照射される光量)とするために、ステージ31の主走査方向への移動速度を変更する場合がある。この場合に、仮に、タイミング信号発生部65における各種タイミング信号の発生に係るパラメータの値(特に、駆動遅延距離T2)をそのまま用いると、往路および復路のそれぞれにおいて、各距離検出パルス信号の発生時における検出領域93の位置と、当該距離検出パルス信号に対応する駆動開始パルス信号によるフォーカス調整が完了する際の照射領域92の位置とが一致しなくなるとともに、往路における複数の検出距離の検出位置と、復路における複数の検出距離の検出位置とが大幅にずれてしまう。
これに対し、パターン描画装置1では、主走査機構25における移動速度を変更する場合に、図8のステップS21の処理にて取得される駆動遅延時間に、新たな移動速度を乗じることにより新たな駆動遅延距離が取得される。そして、往路および復路におけるパルス入力ON信号の発生位置の決定処理として、図8のステップS22〜S25の処理が当該駆動遅延距離を用いて行われる。これにより、往路および復路のパルス入力ON信号の発生位置を容易に、かつ、適切に決定することができ、光学ヘッド41からの光ビームの合焦位置を基板9の主面91上に精度よく合わせることができる。なお、照射−検出間距離T3(および設定ピッチT1)は移動速度に依存しないため、そのままの値が用いられる。
ところで、ステージ31の主走査方向への移動速度を変更する際に、新たな移動速度に合わせて駆動遅延距離のみを更新し、往路および復路のパルス入力ON信号の発生位置をそのまま利用する場合、移動速度の変更に伴う各種動作タイミングのずれにより、往路における複数の検出距離の検出位置と、復路における複数の検出距離の検出位置との間に僅かなずれが生じるが、このずれ量は一定の範囲内となる。したがって、往路および復路におけるパルス入力ON信号の主走査方向の発生位置をそのまま利用しても、各主走査において、直前の主走査にて取得される複数の検出距離を用いて複数回のフォーカス調整が行われる際に、光学ヘッド41からの光ビームの合焦位置を主面91上にある程度の精度にて合わせることが可能となる。ただし、光ビームの合焦位置を主面91上により精度よく合わせるには、主走査機構25におけるステージ31の移動速度を変更する場合に、図8のステップS22〜S25の処理が行われることが好ましい。
以上、本発明の実施の形態について説明してきたが、本発明は上記実施の形態に限定されるものではなく、様々な変形が可能である。
図8のステップS22〜S25の処理では、往路に関して任意のパルス入力ON信号の発生位置にて複数の検出距離を取得し、復路に関して、パルス入力ON信号の発生位置を複数通りに変更して各発生位置における複数の検出距離を取得することにより、実際のパターン描画動作時の往路および復路におけるパルス入力ON信号の発生位置が決定されてもよい。また、ステップS23の処理にて、往路パルス入力ON信号の発生位置を比較的細かい間隔にて複数通りに変更する場合には、ステップS24の処理にて、往路と復路との間の複数の検出距離の差を示す評価値が最小となる往路パルス入力ON信号の発生位置が、パターン描画動作における実際の往路パルス入力ON信号の発生位置として決定されてもよい。さらに、評価値と往路パルス入力ON信号の発生位置との関係を示す関数に基づいて、往路パルス入力ON信号の発生位置を仮決定し、当該発生位置を中心として細かい間隔にて往路パルス入力ON信号の発生位置を複数通りに変更して、各発生位置における複数の検出距離を取得し、往路パルス入力ON信号の複数通りの発生位置のうち評価値が最小となる発生位置が、パターン描画動作における実際の往路パルス入力ON信号の発生位置として最終決定されてもよい。
以上のように、パターン描画装置1では、往路および復路のそれぞれにおけるパルス入力ON信号の発生位置の決定処理において、制御部6により、往路および復路の一方の経路に関して、任意に決定されたパルス入力ON信号の発生位置にて一の線状領域に対する複数の検出距離が取得され、往路および復路の他方の経路に関して、パルス入力ON信号の発生位置を設定ピッチT1よりも小さい間隔にて複数通りに変更して、各発生位置に関して当該線状領域に対する複数の検出距離が取得される。そして、パルス入力ON信号の各発生位置に関する複数の検出距離と、当該一方の経路における複数の検出距離との差に基づいて、当該他方の経路におけるパルス入力ON信号の発生位置が決定される。これにより、往路の検出位置と復路の検出位置とが近似する往路および復路のパルス入力ON信号の発生位置を容易に、かつ、精度よく決定することができる。
上記実施の形態における往路および復路は、主走査方向における進行方向を区別するためのものであり、最初の主走査が必ずしも往路とされる必要はなく、照射領域92が検出領域93よりも先行する復路が最初の主走査とされて、検出距離の取得のみが行われてもよい。
上記実施の形態において、照射領域92と検出領域93とを副走査方向に線状領域の幅の3倍だけ離れさせ、各主走査において3回前の主走査にて取得される複数の検出距離を用いて複数回のフォーカス調整が行われてもよい。このように、パターン描画装置1では、各主走査にてパターンが描画される線状領域に対する複数の検出距離が、当該主走査とは反対の進行方向となるN回前の主走査(ただし、Nは1以上の奇数)にて距離検出部5により取得されるように、照射領域92と検出領域93とが副走査方向に離れていればよく、これにより、各主走査においてN回前の主走査にて取得される複数の検出距離を用いて複数回のフォーカス調整を行うことが可能となる。
パターン描画装置の設計によっては、例えば、基板9または光学ヘッド41をZ方向に微小移動するフォーカス機構により、光ビームの合焦位置が基板9の主面91上に合わせられてもよい。また、距離検出部も、超音波等を利用して基板9の主面91に垂直な方向に関して主面91との間の検出距離を取得するものであってもよい。
基板9の主面にパターン描画用の光を照射する光学ヘッド41では、回折格子型の光変調素子以外の光変調素子を有する空間光変調器(例えば、液晶シャッタ等)が設けられてもよく、また、配列された複数の光源のON/OFFを個別に制御することにより空間変調された光ビームが出射されてもよい。また、パターンの描画は、光ビーム以外の変調可能なエネルギービーム(例えば、電子ビームやイオンビーム等)をヘッドから基板の主面上に照射することにより行われてもよく、この場合、基板の主面上には当該エネルギービームの照射によりパターンの描画が可能となる他の感光材料が設けられる。
また、パターン描画装置において、1つの光学ヘッド41により基板9の全体にパターンが描画されてもよい。ただし、パターンをより高速に描画するには、複数の光学ヘッド41が設けられることが好ましい。
上記実施の形態では、主走査機構25および副走査機構23により、基板9を保持するステージ31が光学ヘッド41および距離検出部5に対して主走査方向および副走査方向に移動するが、ステージ31の光学ヘッド41および距離検出部5に対する移動は相対的なものであってよく、光学ヘッド41および距離検出部5がステージ31上の基板9の主面に平行な主走査方向および副走査方向に移動してもよい。また、基板9を保持する保持部は、基板9が載置されるステージ31以外に、例えば、基板9の端部を把持するものであってもよい。
位置測定部26は、主走査方向に関して光学ヘッド41および距離検出部5に対する保持部の相対的な位置が測定可能であるならば、レーザー測長器以外の測長器が採用されてもよい。
パターン描画装置にてパターンが描画される基板は、各種表示装置のパネル用のガラス基板以外に、半導体基板やプリント配線基板、フォトマスク用基板等であってもよい。
上記実施の形態および各変形例における構成は、相互に矛盾しない限り適宜組み合わせられてよい。