JP5350645B2 - 医療システム及び内視鏡システム - Google Patents
医療システム及び内視鏡システム Download PDFInfo
- Publication number
- JP5350645B2 JP5350645B2 JP2008033563A JP2008033563A JP5350645B2 JP 5350645 B2 JP5350645 B2 JP 5350645B2 JP 2008033563 A JP2008033563 A JP 2008033563A JP 2008033563 A JP2008033563 A JP 2008033563A JP 5350645 B2 JP5350645 B2 JP 5350645B2
- Authority
- JP
- Japan
- Prior art keywords
- sheath
- exterior
- exterior member
- distal end
- insertion member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003780 insertion Methods 0.000 claims abstract description 210
- 230000037431 insertion Effects 0.000 claims abstract description 210
- 238000011282 treatment Methods 0.000 claims abstract description 108
- 230000002093 peripheral effect Effects 0.000 claims description 41
- 238000000605 extraction Methods 0.000 claims description 33
- 230000007246 mechanism Effects 0.000 claims description 30
- 238000003825 pressing Methods 0.000 claims description 8
- 238000010586 diagram Methods 0.000 description 47
- 238000003860 storage Methods 0.000 description 18
- 230000005540 biological transmission Effects 0.000 description 8
- 210000000013 bile duct Anatomy 0.000 description 5
- 239000011347 resin Substances 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 239000004575 stone Substances 0.000 description 5
- 238000001356 surgical procedure Methods 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000002360 preparation method Methods 0.000 description 4
- 238000005452 bending Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 230000002183 duodenal effect Effects 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000012277 endoscopic treatment Methods 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- BFKJFAAPBSQJPD-UHFFFAOYSA-N tetrafluoroethene Chemical group FC(F)=C(F)F BFKJFAAPBSQJPD-UHFFFAOYSA-N 0.000 description 1
Images























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00133—Drive units for endoscopic tools inserted through or with the endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Endoscopes (AREA)
Description
本発明の他の態様の医療システムは、少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿される、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部とで構成される処置具と、前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、前記外装部材の基端面から延出する前記内挿部材の中途部外表面に固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のとき、該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、を具備し、前記挿入部は、当該挿入部を構成する前記内挿部材が管状で可撓性を有すると共に、前記内挿部材の中空部に挿通される可撓性を有し、該内挿部材より長尺で細径な細径内挿部材を有し、かつ、前記内挿部材の先端側内周面に固設される、第2ストッパ部材と、前記内挿部材の基端部外周面に固設される保持部材と、前記細径内挿部材の先端側外周面に固設され、前記第2ストッパ部材に当接する第2係止部材と、前記内挿部材の基端面から延出された前記細径内挿部材の中途部外周面に固設され、該内挿部材の基端部に設けられた保持部材に当接する、第2当接リングと、を具備する。
本発明の一態様の内視鏡システムは、処置具チャンネルを有する内視鏡と、前記内視鏡の処置具チャンネルに挿通可能で、少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿され、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部で構成される処置具と、前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、前記外装部材の基端面から延出される前記内挿部材の中途部外表面固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のときには該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、を具備し、前記進退移動切替機構部は、前記内挿部材の先端側外表面の所定位置に固設される係止部材と、前記外装部材の先端側内周面の所定位置に構成されるストッパ部材とを備え、前記外装部材が前進移動するとき、前記ストッパ部材と前記係止部材とが当接して前記外装部材及び前記内挿部材は一体で前進する一方、前記内挿部材が後退移動するとき、前記係止部材と前記ストッパ部材とが当接して前記内挿部材及び前記外装部材は一体で後退することを特徴とする。
本発明の他の態様の内視鏡システムは、処置具チャンネルを有する内視鏡と、前記内視鏡の処置具チャンネルに挿通可能で、少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿され、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部で構成される処置具と、前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、前記外装部材の基端面から延出される前記内挿部材の中途部外表面固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のときには該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、を具備し、前記挿入部は、前記挿入部を構成する前記内挿部材が管状で可撓性を有すると共に、内挿部材の中空部に挿通される可撓性を有し、該内挿部材より長尺で細径な細径内挿部材を有し、かつ、前記内挿部材の先端側内周面に固設される、第2ストッパ部材と、前記内挿部材の基端部外周面に固設される保持部材と、前記細径内挿部材の先端側外周面に固設され、前記第2ストッパ部材に当接する第2係止部材と、前記内挿部材の基端面から延出された前記細径内挿部材の中途部外周面に固設され、該内挿部材の基端部に設けられた保持部材に当接する、第2当接リングと、を具備する。
図1乃至図19は本発明の第1実施形態に係り、図1は内視鏡システムの一構成例を説明する図、図2は電動操作装置の一構成例を説明する図、図3は作動装置の内部構造を説明するための要部断面図、図4は作動装置のスライダ部近傍の構成を説明する斜視図、図5は作動装置のスライダ部の固定ノブを含む構成を説明する断面図、図6はクリップ装置を備えたクリップ装置用カートリッジを説明する図、図7はケース本体の構成を説明する断面図、及びシース収納部に収納されたシース部の収納状態を説明する図、図8はケース本体の導出孔からシース部が導出されている状態を説明する図、図9はクリップ装置の先端部の構成を説明する断面図、図10はクリップユニットが外シースから突出された状態におけるクリップ装置の先端部を説明する断面図、図11はクリップユニットのクリップを目的部位に留置した状態におけるクリップ装置の先端部を説明する断面図、図12はクリップ装置の外シースがローラに挟持された状態を説明する図、図13はクリップ装置の外シースがローラによって前進されている状態を説明する図、図14はローラに外シースに代わって、内シースが挟持された状態を説明する図、図15はローラによって内シースが前進されて、クリップユニットが外シースから突出された状態を説明する図、図16はクリップユニットのクリップを目的部位に留置した状態を説明する図、図17はローラを逆回転させて内シースを後退させている状態を説明する図、図18はローラに内シースに代わって、外シースが挟持された状態を説明する図、図19はシース部の抜去を完了した状態を説明する図である。
図1に示すように医療装置である内視鏡システム1は、操作指示装置2と、光源装置及びビデオプロセッサを兼ねる制御装置7と、電動操作装置8と、内視鏡10と、細長な後述するシース部を備える処置具20とで主に構成されている。
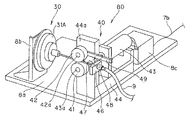
図1、図2に示すように作動装置50は一対の取付台51を介して台8aに設置される。作動装置50は、主に、管状の装置本体であるスライド座52と、延出部固定部53と、スライダ部54と、駆動部55とを備えて構成されている。なお、スライダ部54は、操作ワイヤ固定部56を一体的に備え、スライダ部54には操作ワイヤ24を着脱自在に接続するための固定ノブ54aが備えられている。
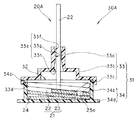
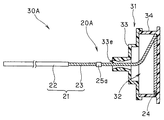
図6乃至図8に示すようにクリップ装置20Aは、ケース本体31のシース収納部32に収納されるシース部21を備えている。シース部21は、長手軸方向の中空部を有する弾性チューブ体である外シース22と、該外シース22の中空部内に進退自在に挿通された可撓性を有し長手軸方向に中空部を有するコイルシースで構成された内シース23と備えて構成されている。内シース23内には前記操作ワイヤ24が摺動自在に配置されている。内シース23の基端側は、外シース22の基端面より延出している。操作ワイヤ24の基端側は、内シース23より延出して、シース基端固定部35の貫通孔及び延出部36内を通過してケース本体31の外部に延出されている。
まず、作業者は、滅菌済みのクリップ装置20Aを構成するストッパ部材27が設けられた外シース22、係止リング25bが設けられた内シース23、操作ワイヤ24、当接リング25a、クリップユニット26、及びケース本体31を構成する第1部材33、シース基端固定部35が一体な第2部材34等を準備する。なお、外シース22の長さ寸法は、内視鏡10に備えられている処置具チャンネル11eの長さ寸法、連結チューブ9の長さ寸法、取付板46の厚み、栓体47の長さ寸法等を考慮して設定されており、ストッパ部材27は外シース22の先端部の内周面所定位置に一体的に設けられている。一方、内シース23の長さ寸法は、外シース22の長さ寸法より所定寸法長く設定されており、係止リング25bは内シース23の先端部の外周面所定位置に一体的に設けられている。
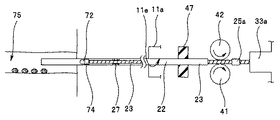
上述のように構成したクリップ装置用カートリッジ30Aが処置具取付部8bに装着された内視鏡システム1の作用を図12乃至図19を参照して説明する。
図33に示すようにクリップ装置20Cは、ケース本体31Aのシース収納部32に収納されるシース部21を備えている。シース部21は、外装部材である外シース22と、中空部を有する内挿部材である内シース23と、細径内挿部材である操作ワイヤ24とを備えて構成されている。本実施形態において、操作ワイヤ24は、内シース23の中空部内に摺動自在に配置され、該操作ワイヤ24の基端側はシース収納部32内で該内シース23の基端面より延出している。
Claims (4)
- 少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿される、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部とで構成される処置具と、
前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、
前記外装部材の基端面から延出する前記内挿部材の中途部外表面に固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、
前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のとき、該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、
を具備し、
前記進退移動切替機構部は、
前記内挿部材の先端側外表面の所定位置に固設される係止部材と、
前記外装部材の先端側内周面の所定位置に構成されるストッパ部材とを備え、
前記外装部材が前進移動するとき、前記ストッパ部材と前記係止部材とが当接して前記外装部材及び前記内挿部材は一体で前進する一方、前記内挿部材が後退移動するとき、前記係止部材と前記ストッパ部材とが当接して前記内挿部材及び前記外装部材は一体で後退することを特徴とする医療システム。 - 少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿される、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部とで構成される処置具と、
前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、
前記外装部材の基端面から延出する前記内挿部材の中途部外表面に固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、
前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のとき、該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、
を具備し、
前記挿入部は、
当該挿入部を構成する前記内挿部材が管状で可撓性を有すると共に、
前記内挿部材の中空部に挿通される可撓性を有し、該内挿部材より長尺で細径な細径内挿部材を有し、かつ、
前記内挿部材の先端側内周面に固設される、第2ストッパ部材と、
前記内挿部材の基端部外周面に固設される保持部材と、
前記細径内挿部材の先端側外周面に固設され、前記第2ストッパ部材に当接する第2係止部材と、
前記内挿部材の基端面から延出された前記細径内挿部材の中途部外周面に固設され、該内挿部材の基端部に設けられた保持部材に当接する、第2当接リングと、
を具備することを特徴とする医療システム。 - 処置具チャンネルを有する内視鏡と、
前記内視鏡の処置具チャンネルに挿通可能で、少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿され、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部で構成される処置具と、
前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、
前記外装部材の基端面から延出される前記内挿部材の中途部外表面固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、
前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のときには該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、
を具備し、
前記進退移動切替機構部は、
前記内挿部材の先端側外表面の所定位置に固設される係止部材と、
前記外装部材の先端側内周面の所定位置に構成されるストッパ部材とを備え、
前記外装部材が前進移動するとき、前記ストッパ部材と前記係止部材とが当接して前記外装部材及び前記内挿部材は一体で前進する一方、前記内挿部材が後退移動するとき、前記係止部材と前記ストッパ部材とが当接して前記内挿部材及び前記外装部材は一体で後退することを特徴とする内視鏡システム。 - 処置具チャンネルを有する内視鏡と、
前記内視鏡の処置具チャンネルに挿通可能で、少なくとも、外装を構成する先端及び基端を有する細長な外装部材及び該外装部材に進退自在に内挿され、該外装部材より長尺な内挿部材で構成される挿入部、および、前記挿入部の先端に配設された機能部で構成される処置具と、
前記外装部材、又は前記内挿部材の外表面を押圧挟持する少なくとも一組のローラを備え、該少なくとも一組のローラの回転駆動力を前記外装部材、又は前記内挿部材に伝達して前記挿入部を進退させる挿入部挿抜装置と、
前記外装部材の基端面から延出される前記内挿部材の中途部外表面固設され、前記外装部材の基端面から軸方向に離間した位置から前記ローラよりも前方且つ前記外装部材の基端面に対して当接する位置に移動可能な駆動力非伝達部と、
前記外装部材が前進状態のとき、該外装部材の移動に伴って前記内挿部材を前進させ、前記内挿部材が後退状態のときには該内挿部材の移動に伴って前記外装部材を後退させる進退移動切替機構部と、
を具備し、
前記挿入部は、
前記挿入部を構成する前記内挿部材が管状で可撓性を有すると共に、
内挿部材の中空部に挿通される可撓性を有し、該内挿部材より長尺で細径な細径内挿部材を有し、かつ、
前記内挿部材の先端側内周面に固設される、第2ストッパ部材と、
前記内挿部材の基端部外周面に固設される保持部材と、
前記細径内挿部材の先端側外周面に固設され、前記第2ストッパ部材に当接する第2係止部材と、
前記内挿部材の基端面から延出された前記細径内挿部材の中途部外周面に固設され、該内挿部材の基端部に設けられた保持部材に当接する、第2当接リングと、
を具備することを特徴とする内視鏡システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/708622 | 2007-02-20 | ||
| US11/708,622 US8986197B2 (en) | 2007-02-20 | 2007-02-20 | Medical system and endoscope system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008200494A JP2008200494A (ja) | 2008-09-04 |
| JP5350645B2 true JP5350645B2 (ja) | 2013-11-27 |
Family
ID=39474024
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008033563A Expired - Fee Related JP5350645B2 (ja) | 2007-02-20 | 2008-02-14 | 医療システム及び内視鏡システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8986197B2 (ja) |
| EP (1) | EP1961369B1 (ja) |
| JP (1) | JP5350645B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022255771A1 (ko) * | 2021-06-04 | 2022-12-08 | 주식회사 이지엔도서지컬 | 유연 수술도구의 버클링 방지 장치 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7691104B2 (en) * | 2007-07-25 | 2010-04-06 | Olympus Medical Systems Corporation | Endoscopic treatment tool |
| JP5407036B2 (ja) * | 2008-09-02 | 2014-02-05 | オリンパスメディカルシステムズ株式会社 | 処置用内視鏡 |
| WO2011084490A1 (en) | 2009-12-15 | 2011-07-14 | Cornell University | Method and apparatus for stabilizing, straightening, or expanding the wall of a lumen or cavity |
| US11986150B2 (en) | 2009-12-15 | 2024-05-21 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US10149601B2 (en) | 2009-12-15 | 2018-12-11 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US10485401B2 (en) | 2009-12-15 | 2019-11-26 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US9986893B2 (en) | 2009-12-15 | 2018-06-05 | Cornell University | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US11877722B2 (en) | 2009-12-15 | 2024-01-23 | Cornell University | Method and apparatus for manipulating the side wall of a body lumen or body cavity |
| WO2013029045A1 (en) * | 2011-08-25 | 2013-02-28 | The Johns Hopkins University | Endoscope manipulation adapter |
| WO2014129670A1 (en) * | 2013-02-25 | 2014-08-28 | Olympus Corporation | Medical manipulator and medical manipulator control method |
| WO2016099614A1 (en) | 2014-12-15 | 2016-06-23 | Gyrus Acmi, Inc. (D/B/A/ Olympus Surgical Technologies America) | Improved control of a basket retrieval device |
| CN107613832B (zh) * | 2015-03-19 | 2020-07-28 | 恩达马斯特有限公司 | 增强型柔性机器人内窥镜检查装置 |
| US10806489B2 (en) * | 2015-07-31 | 2020-10-20 | Purdue Research Foundation | Systems and methods for performing a surgical procedure |
| JP6794369B2 (ja) * | 2015-11-30 | 2020-12-02 | 株式会社カネカ | 医療用クリップカートリッジ |
| WO2017184887A1 (en) * | 2016-04-21 | 2017-10-26 | Zenflow, Inc. | Systems and methods for implants and deployment devices |
| CA3046087A1 (en) | 2016-12-09 | 2018-06-14 | Zenflow, Inc. | Systems, devices, and methods for the accurate deployment of an implant in the prostatic urethra |
| WO2019032404A1 (en) | 2017-08-07 | 2019-02-14 | Boston Scientific Scimed, Inc. | MEDICAL SYSTEMS, DEVICES, AND ASSOCIATED METHODS |
| US11026687B2 (en) * | 2017-10-30 | 2021-06-08 | Cilag Gmbh International | Clip applier comprising clip advancing systems |
| CN111265179B (zh) * | 2020-02-26 | 2023-11-03 | 上海澳华内镜股份有限公司 | 一种处置器具行进辅助工具及内窥镜系统 |
| WO2022104262A1 (en) | 2020-11-16 | 2022-05-19 | Lumendi Ltd. | Methods and apparatus for inverting a hollow sleeve and thereafter reverting an inverted hollow sleeve |
| KR102576537B1 (ko) * | 2021-07-15 | 2023-09-08 | 주식회사 엔도로보틱스 | 텐던-쉬스 구동 장치 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4721116A (en) * | 1985-06-04 | 1988-01-26 | Schintgen Jean Marie | Retractable needle biopsy forceps and improved control cable therefor |
| US5346498A (en) * | 1991-11-06 | 1994-09-13 | Imagyn Medical, Inc. | Controller for manipulation of instruments within a catheter |
| JPH08126648A (ja) | 1994-11-02 | 1996-05-21 | Olympus Optical Co Ltd | 内視鏡用処置具 |
| US5695491A (en) | 1994-11-22 | 1997-12-09 | Washington Research Foundation | Endoscopic accessory and containment system |
| JP3780016B2 (ja) | 1995-10-20 | 2006-05-31 | オリンパス株式会社 | 内視鏡用処置具挿抜装置 |
| IL123646A (en) | 1998-03-11 | 2010-05-31 | Refael Beyar | Remote control catheterization |
| CA2455385C (en) * | 2001-06-26 | 2011-01-25 | Tyco Healthcare Group, Lp | Conduit harvesting instrument and method |
| JP2003265406A (ja) | 2002-03-19 | 2003-09-24 | Olympus Optical Co Ltd | 内視鏡処置具進退装置 |
| JP4231264B2 (ja) | 2002-09-27 | 2009-02-25 | Hoya株式会社 | 内視鏡の長尺処置要素の挿抜装置 |
| JP4504696B2 (ja) | 2004-02-03 | 2010-07-14 | オリンパス株式会社 | 内視鏡用処置具及び内視鏡並びに内視鏡処置システム |
| JP4593129B2 (ja) | 2004-02-26 | 2010-12-08 | オリンパス株式会社 | 内視鏡 |
| WO2005112824A1 (en) | 2004-05-14 | 2005-12-01 | Boston Scientific Scimed, Inc | Stent delivery handle and assembly formed therewith |
| JP2006081726A (ja) * | 2004-09-16 | 2006-03-30 | Olympus Corp | 内視鏡用処置具及び内視鏡用処置具に用いられる処置ユニット |
| JP2006087474A (ja) | 2004-09-21 | 2006-04-06 | Olympus Corp | 処置具システム及び内視鏡処置システム |
-
2007
- 2007-02-20 US US11/708,622 patent/US8986197B2/en active Active
-
2008
- 2008-02-14 JP JP2008033563A patent/JP5350645B2/ja not_active Expired - Fee Related
- 2008-02-18 EP EP20080002949 patent/EP1961369B1/en not_active Not-in-force
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022255771A1 (ko) * | 2021-06-04 | 2022-12-08 | 주식회사 이지엔도서지컬 | 유연 수술도구의 버클링 방지 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8986197B2 (en) | 2015-03-24 |
| JP2008200494A (ja) | 2008-09-04 |
| US20080200756A1 (en) | 2008-08-21 |
| EP1961369A3 (en) | 2009-01-21 |
| EP1961369A2 (en) | 2008-08-27 |
| EP1961369B1 (en) | 2011-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5350645B2 (ja) | 医療システム及び内視鏡システム | |
| JP4914891B2 (ja) | 内視鏡処置システム | |
| US7682366B2 (en) | Calculus manipulation apparatus | |
| US8092371B2 (en) | Medical treatment endoscope | |
| JP5009251B2 (ja) | 関節内視鏡器具 | |
| JP4320061B2 (ja) | 内視鏡用の制御装置 | |
| US8075474B2 (en) | Endoscope system and medical instrument | |
| EP2116175B1 (en) | Medical system | |
| EP2123225B1 (en) | Endoscope device | |
| CN105517497B (zh) | 外科手术工具引入器 | |
| JP2002306398A (ja) | 内視鏡装置及び留置チューブの留置方法 | |
| JP2008000580A (ja) | 内視鏡システム、処置具カートリッジ、及び収納ケース | |
| CN110013299B (zh) | 探针施加器 | |
| WO2014007170A1 (ja) | 内視鏡処置具の進退補助具 | |
| JP4246233B2 (ja) | 内臓吻合用マーカー及びマーカー配置装置 | |
| JP2002330928A (ja) | 内視鏡システム | |
| EP2401952B1 (en) | Endoscope apparatus | |
| JP5996832B1 (ja) | 採石破砕装置 | |
| US11045078B2 (en) | Treatment instrument insertion tool | |
| JP3283115B2 (ja) | 内視鏡 | |
| JP5989230B2 (ja) | 医療器具及び医療システム | |
| JP4500310B2 (ja) | 挿入装置、及び内視鏡システム | |
| JP6996000B2 (ja) | 内視鏡システム | |
| KR101620831B1 (ko) | 수술용 인스트루먼트 | |
| JP4350472B2 (ja) | 大腸全層切除の処置用挿入補助具とその医療器具システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101006 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121226 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130701 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130708 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130822 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5350645 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |