JP4246233B2 - 内臓吻合用マーカー及びマーカー配置装置 - Google Patents
内臓吻合用マーカー及びマーカー配置装置 Download PDFInfo
- Publication number
- JP4246233B2 JP4246233B2 JP2006345060A JP2006345060A JP4246233B2 JP 4246233 B2 JP4246233 B2 JP 4246233B2 JP 2006345060 A JP2006345060 A JP 2006345060A JP 2006345060 A JP2006345060 A JP 2006345060A JP 4246233 B2 JP4246233 B2 JP 4246233B2
- Authority
- JP
- Japan
- Prior art keywords
- marker
- portions
- ultrasonic
- hole
- endoscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/273—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the upper alimentary canal, e.g. oesophagoscopes, gastroscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3925—Markers, e.g. radio-opaque or breast lesions markers ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3987—Applicators for implanting markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
Description
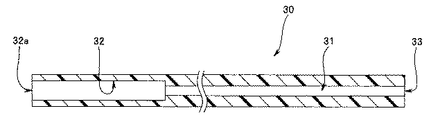
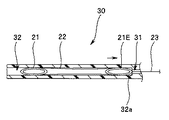
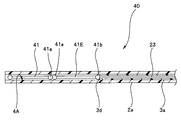
図1乃至図12は内臓吻合用マーカー及びマーカー配置装置の第1実施形態に係り、図1は内視鏡と、内視鏡の処置具チャンネルを介して体腔内に導入されるマーカー配置装置との関係を説明する図、図2は内臓吻合用マーカと、装置本体と、押し出し部材とを説明する分解斜視図、図3は円環状の溝を複数設けた金属製のマーカーの表面を説明する図、図4は内臓吻合用マーカと、装置本体と、押し出し部材とで構成されたマーカー配置装置の構成を説明する断面図、図5は胃空腸吻合術を行う目的部位の説明、及び内視鏡が十二指腸に挿通された状態を説明する図、図6は超音波内視鏡の先端部の構成を説明する斜視図、図7は図6に示す超音波内視鏡の正面図、図8は内視鏡挿入部を介して体腔内に導入されるマーカー配置装置の挿入手順を説明する図であって、図8(a)はマーカー配置装置の挿入部を処置具導入口から処置具チャンネル内に導入している状態を示す図、図8(b)は目盛りを読み取って挿入部の先端面を挿入している状態を説明する図、図9はマーカー配置装置のマーカー収納空間部に収納されているマーカー部を空腸に配置する手順を説明する図であって、図9(a)は挿入部の先端面を目的突出位置に配置させた状態を示す図、図9(b)は押し出し部材の第1段階目の押し込み操作が停止された状態を示す図、図9(c)は挿入部の先端面を目的突出位置から所定距離後退させた状態と、押し出し部材の第2段階目の押し込み操作を完了状態とを説明する図、図10はマーカー配置装置によって、2つのマーカー部を空腸内に配置した状態を説明する図、図11は超音波内視鏡の超音波領域内に2つのマーカー部をとらえた状態を説明する図、図12は超音波領域内にとらえられた2つのマーカー部の超音波断層画像を示す図である。
図2及び図3を参照してマーカー20を説明する。
図2に示すように装置本体2は、挿入部2aと筒体2bと備えて構成されている。挿入部2aの外径寸法は、内視鏡10の有する処置具チャンネル17内に挿通可能な寸法に設定されている。挿入部2aの手元側の外表面には体腔内への導入量を目視にて確認するための目盛り2cが設けられている。
配置装置1は、装置本体2と押し出し部材3とマーカー20とを例えば以下の手順で組み付けていくことによって構成される。
このように構成された配置装置1は、滅菌袋に収納された状態でユーザーに提供される。
経内視鏡的に、図5に示す胃の目的部位Aと空腸の目的部位Bとを吻合する胃空腸吻合術を行うにあたって、ユーザーは、前記配置装置1と、前記内視鏡10と、後述する超音波内視鏡とを用意する。
このように、予め空腸に少なくとも一対のマーカー部を配設し、その後、超音波内視鏡によって空腸に配設されているマーカー部を超音波断層画像中に描出させる。このことによって、術者は胃壁越しに空腸の目的部位を特定することができる。したがって、術者は、経胃的に空腸に向けて穿刺針を穿刺する際、超音波断層画像中で空腸の目的部位を特定して、安全且つ確実な穿刺を行える。
2f… 挿入部貫通孔 2g…管体配設穴 2i…周状凹部 3…押し出し部材
3a…マーカー導出部 3b…管体 3c…導出部貫通孔 3g…第1の凸部
3h…第2の凸部 3k…当接面 4…マーカー収納空間部 5…超音波内視鏡
6…超音振動子部 6A…超音波観測領域 10…内視鏡
20…内臓吻合用マーカー 21…マーカー部 22…連結糸 23…操作糸
50…超音波断層画像
Claims (7)
- 超音波を反射する弾性部材であって、無負荷状態において環状な複数のマーカー部と、
前記複数のマーカー部を、予め設定した間隔で連結する連結部材と、
前記複数のマーカー部のうち、端に位置するマーカー部の1つに一端部が固定され、他端部が体外に導出される長さを有する紐状部材と、
を具備することを特徴とする内臓吻合用マーカー。 - 前記マーカー部は金属製であって、その金属製の該マーカー部の表面に超音波を反射する凹凸状の反射面を設けたことを特徴とする請求項1に記載の内臓吻合用マーカー。
- 前記マーカー部は樹脂製であって、該マーカー部を成形するための樹脂部材に超音波反射物質を混入したことを特徴とする請求項1に記載の内臓吻合用マーカー。
- 請求項1乃至請求項3の何れか1項に記載の内臓吻合用マーカーと、
前記内臓吻合用マーカーを構成する複数のマーカー部を収納する収納部を先端側に備える、可撓性を有し内視鏡の有する処置具チャンネル内に挿通可能なチューブ体及び該チューブ体の基端部が連結される筒体を備える装置本体と、
前記装置本体を構成する前記チューブ体の貫通孔内に摺動自在に配置され、前記内臓吻合用マーカーを構成する紐状部材が挿通される貫通孔を備え、その先端面を該チューブ体の先端側の収納部に収納された前記マーカー部を該収納部から押し出すための押し出し面として構成した可撓性を有するマーカー導出部及び該マーカー導出部の基端部が連結され、前記筒体の貫通孔内に摺動自在に配置される管体を備える押し出し部と、
を具備することを特徴とするマーカー配置装置。 - 前記装置本体を構成するチューブ体は、その外表面に目盛りを備えることを特徴とする請求項4に記載のマーカー配置装置。
- 前記装置本体を構成する筒体は、該筒体の貫通孔の内周面に周状の凹部を有し、
前記押し出し部を構成する管体は、該管体の外周面に前記凹部に係入配置される複数の凸部を有すると共に、前記筒体の基端面に当接する当接面を備えた当接部を有することを特徴とする請求項4に記載のマーカー配置装置。 - 前記複数の凸部のうち、前記当接部の当接面から最も離れた位置にある凸部は、前記チューブ体内における前記押し出し面の配置位置を設定し、他の凸部及び前記当接面は前記押し出し面の段階的な移動距離を設定することを特徴とする請求項4又は請求項6に記載のマーカー配置装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006345060A JP4246233B2 (ja) | 2006-12-21 | 2006-12-21 | 内臓吻合用マーカー及びマーカー配置装置 |
| EP07023560.1A EP1935363B1 (en) | 2006-12-21 | 2007-12-05 | Organ anastomosis marker, marker positioning apparatus and transendoscopic gastrojejunal anastomosis procedure |
| US11/955,775 US20080154129A1 (en) | 2006-12-21 | 2007-12-13 | Organ anastomosis marker, marker positioning apparatus and transendoscopic gastrojejunal anastomosis procedure |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006345060A JP4246233B2 (ja) | 2006-12-21 | 2006-12-21 | 内臓吻合用マーカー及びマーカー配置装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008154694A JP2008154694A (ja) | 2008-07-10 |
| JP4246233B2 true JP4246233B2 (ja) | 2009-04-02 |
Family
ID=39273852
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006345060A Expired - Fee Related JP4246233B2 (ja) | 2006-12-21 | 2006-12-21 | 内臓吻合用マーカー及びマーカー配置装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20080154129A1 (ja) |
| EP (1) | EP1935363B1 (ja) |
| JP (1) | JP4246233B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10420665B2 (en) | 2010-06-13 | 2019-09-24 | W. L. Gore & Associates, Inc. | Intragastric device for treating obesity |
| US8628554B2 (en) | 2010-06-13 | 2014-01-14 | Virender K. Sharma | Intragastric device for treating obesity |
| US9526648B2 (en) | 2010-06-13 | 2016-12-27 | Synerz Medical, Inc. | Intragastric device for treating obesity |
| US10010439B2 (en) | 2010-06-13 | 2018-07-03 | Synerz Medical, Inc. | Intragastric device for treating obesity |
| JP6259661B2 (ja) * | 2011-01-28 | 2018-01-10 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 光学的追跡システム |
| US10779980B2 (en) | 2016-04-27 | 2020-09-22 | Synerz Medical, Inc. | Intragastric device for treating obesity |
| US10485629B2 (en) * | 2017-02-24 | 2019-11-26 | Sony Olympus Medical Solutions Inc. | Endoscope device |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5752522A (en) * | 1995-05-04 | 1998-05-19 | Cardiovascular Concepts, Inc. | Lesion diameter measurement catheter and method |
| US6106473A (en) * | 1996-11-06 | 2000-08-22 | Sts Biopolymers, Inc. | Echogenic coatings |
| US5759154A (en) * | 1996-12-23 | 1998-06-02 | C. R. Bard, Inc. | Print mask technique for echogenic enhancement of a medical device |
| US6371904B1 (en) * | 1998-12-24 | 2002-04-16 | Vivant Medical, Inc. | Subcutaneous cavity marking device and method |
| JP2001000430A (ja) * | 1999-06-24 | 2001-01-09 | Alcare Co Ltd | 画像撮影用のマ−カ− |
| AU2002360695A1 (en) * | 2001-12-19 | 2003-07-09 | Nmt Medical, Inc. | Septal occluder and associated methods |
| EP1494611A2 (en) * | 2002-03-11 | 2005-01-12 | John L. Wardle | Surgical coils and methods of deploying |
| CA2505961C (en) * | 2002-11-18 | 2011-10-11 | Inrad, Inc. | Apparatus for implanting a preloaded localization wire |
| JP3890013B2 (ja) * | 2002-12-05 | 2007-03-07 | オリンパス株式会社 | 超音波用穿刺針 |
| JP4477382B2 (ja) | 2003-03-04 | 2010-06-09 | オリンパス株式会社 | 内視鏡的腹腔内処置システム |
| US20060293581A1 (en) * | 2005-05-12 | 2006-12-28 | Sunnybrook And Women's College Health Sciences Centre | Marker device for X-ray, ultrasound and MR imaging |
| US20070093860A1 (en) * | 2005-09-20 | 2007-04-26 | Rao Rob K | Surgical method and clamping apparatus for repair of a defect in a dural membrane or a vascular wall, and anastomic method and apparatus for a body lumen |
-
2006
- 2006-12-21 JP JP2006345060A patent/JP4246233B2/ja not_active Expired - Fee Related
-
2007
- 2007-12-05 EP EP07023560.1A patent/EP1935363B1/en not_active Expired - Fee Related
- 2007-12-13 US US11/955,775 patent/US20080154129A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP1935363A2 (en) | 2008-06-25 |
| EP1935363B1 (en) | 2015-06-24 |
| EP1935363A3 (en) | 2009-09-30 |
| JP2008154694A (ja) | 2008-07-10 |
| US20080154129A1 (en) | 2008-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7273451B2 (en) | Endoscopic treatment system and anastomotic method using this system | |
| EP2330986B1 (en) | Endoscopic suturing device | |
| JP4472728B2 (ja) | 内視鏡システム | |
| JP4898709B2 (ja) | 経自然開口的または経皮的な医療システム | |
| JP5407036B2 (ja) | 処置用内視鏡 | |
| JP4971209B2 (ja) | 医療装置 | |
| EP1894514B1 (en) | Ultrasonic endoscope | |
| US8758375B2 (en) | Method for suturing perforation | |
| JP4246233B2 (ja) | 内臓吻合用マーカー及びマーカー配置装置 | |
| JP3926831B2 (ja) | 組織縫合結紮器 | |
| JPH11276422A (ja) | 超音波内視鏡 | |
| JP5064077B2 (ja) | 医療用スネアリング装置 | |
| JPH0647050A (ja) | 組織縫合結紮器 | |
| JPH08503401A (ja) | 目視用套管針とその目視化挿入方法 | |
| EP3178405B1 (en) | Puncture needle for endoscope | |
| JP2008161570A (ja) | 超音波内視鏡システム | |
| JP4445736B2 (ja) | 大腸全層切除の処置用挿入補助具とその医療器具システム | |
| JP3851849B2 (ja) | 組織縫合結紮器 | |
| US20090227866A1 (en) | Ultrasound endoscopic intraluminal organ treatment method | |
| JP2009285204A (ja) | 内視鏡用処置具 | |
| JP2004305593A (ja) | 内視鏡用挿入補助具 | |
| CN108882931B (zh) | 缝合装置 | |
| KR20100000280A (ko) | 외과 수술용 기구 | |
| JP4934086B2 (ja) | 医療装置 | |
| JP2020039858A (ja) | 体内撮像装置および補助具セット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081216 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090107 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4246233 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120116 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130116 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140116 Year of fee payment: 5 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |