JP5349768B2 - 振動波駆動装置 - Google Patents
振動波駆動装置 Download PDFInfo
- Publication number
- JP5349768B2 JP5349768B2 JP2007169142A JP2007169142A JP5349768B2 JP 5349768 B2 JP5349768 B2 JP 5349768B2 JP 2007169142 A JP2007169142 A JP 2007169142A JP 2007169142 A JP2007169142 A JP 2007169142A JP 5349768 B2 JP5349768 B2 JP 5349768B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- permanent magnet
- driven body
- force
- friction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
図1は、本発明の第1の実施の形態に係る振動波駆動装置としてのリニア型超音波モータの構成を示す斜視図である。図2は、リニア型超音波モータの構成を示す断面図である。図3は、リニア型超音波モータの振動子の弾性体の構成を示す平面図である。
本発明の第2の実施の形態は、上記第1の実施の形態に対して図5に示す点において相違する。本実施の形態では、上記第1の実施の形態との相違点を中心に説明し、上記第1の実施の形態と同様(または類似)の部分については説明を省略または簡略化する。
本発明の第3の実施の形態は、上記第1の実施の形態に対して図6に示す点において相違する。本実施の形態では、上記第1の実施の形態との相違点を中心に説明し、上記第1の実施の形態と同様(または類似)の部分については説明を省略または簡略化する。
本発明の第4の実施の形態は、上記第1の実施の形態に対して図7に示す点において相違する。本実施の形態では、上記第1の実施の形態との相違点を中心に説明し、上記第1の実施の形態と同様(または類似)の部分については説明を省略または簡略化する。
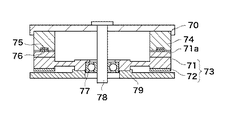
本発明の第5の実施の形態は、上記第1の実施の形態に対して図8に示す点において相違する。本実施の形態では、上記第1の実施の形態との相違点を中心に説明し、上記第1の実施の形態と同様(または類似)の部分については説明を省略または簡略化する。
22、52、62、72、82 圧電素子
23、53、63、73、83 振動子
24、54、64 永久磁石
25、55、65、75、85 弾性部材
26、56、66、76、86 摩擦部材
27、57、67、87 移動体
74 ロータ
Claims (5)
- 電気量を機械量としての振動に変換する電気−機械エネルギ変換素子と軟磁性材料からなる弾性体とを接合して構成される振動子と、
前記振動子を構成する前記弾性体に対し部分的な隙間を有して接触され、前記振動子に励起される振動により発生する摩擦駆動力によって駆動される被駆動体と、
前記振動子と前記被駆動体との間に圧接力を発生させる加圧手段とを備え、
前記電気−機械エネルギ変換素子と前記弾性体は、板状に形成され、
前記被駆動体は、駆動方向に長い形状に形成され、
前記加圧手段を前記圧接力としての磁力を発生させる永久磁石から構成すると共に、前記永久磁石を前記被駆動体と一体的に形成し、
前記振動子と前記被駆動体とが対向する部分に、前記振動子と前記被駆動体とを接触させる摩擦接触部と前記永久磁石による圧接力発生部とを分離して配置し、
前記摩擦接触部は、前記被駆動体側又は前記振動子側のいずれかに配置され、
前記摩擦接触部は、バネ性を有する弾性部材と耐磨耗性を有する摩擦部材とから構成され、
前記振動子の前記弾性体と前記被駆動体との間に設ける前記隙間の距離を、前記振動子と前記被駆動体との間に配置される前記摩擦接触部の厚さより小さく構成したことを特徴とする振動波駆動装置。 - 前記永久磁石における前記被駆動体の駆動方向と直交する断面を凸形状に形成すると共に、前記断面を凸形状に形成された凸部の両側に前記摩擦接触部を配置し、
前記弾性体と前記永久磁石との間の前記隙間を前記凸部の高さ方向の寸法に比較して小さく設定すると共に、前記隙間を介して前記圧接力を作用させることを特徴とする請求項1記載の振動波駆動装置。 - 前記永久磁石における前記被駆動体の駆動方向と直交する断面を凹形状に形成すると共に、前記断面を凹形状に形成された凹部の内側に前記摩擦接触部を配置し、
前記弾性体と前記永久磁石との間の前記隙間を前記凹部の深さ方向の寸法に比較して小さく設定すると共に、前記隙間を介して前記圧接力を作用させることを特徴とする請求項1記載の振動波駆動装置。 - 前記バネ性を有する弾性部材を高分子材料により形成したことを特徴とする請求項1記載の振動波駆動装置。
- 前記被駆動体において、前記摩擦接触部を介して前記振動子と向かい合う部分と、前記摩擦接触部を介さずに前記振動子と向かい合う部分は、異なる極性に着磁されていることを特徴とする請求項1記載の振動波駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007169142A JP5349768B2 (ja) | 2007-06-27 | 2007-06-27 | 振動波駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007169142A JP5349768B2 (ja) | 2007-06-27 | 2007-06-27 | 振動波駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009011058A JP2009011058A (ja) | 2009-01-15 |
| JP2009011058A5 JP2009011058A5 (ja) | 2010-07-01 |
| JP5349768B2 true JP5349768B2 (ja) | 2013-11-20 |
Family
ID=40325567
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007169142A Active JP5349768B2 (ja) | 2007-06-27 | 2007-06-27 | 振動波駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5349768B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10498261B2 (en) | 2016-01-14 | 2019-12-03 | Canon Kabushiki Kaisha | Vibration-type actuator that moves vibrating body and driven body relatively to each other, and electronic apparatus |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6576214B2 (ja) | 2015-11-06 | 2019-09-18 | キヤノン株式会社 | 振動型アクチュエータ、レンズ鏡筒、撮像装置及びステージ装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6356176A (ja) * | 1986-08-22 | 1988-03-10 | Nippon Denso Co Ltd | 超音波モ−タ |
| JPS63277478A (ja) * | 1987-04-10 | 1988-11-15 | Matsushita Electric Ind Co Ltd | 超音波モ−タ |
| JPH0222094U (ja) * | 1988-07-26 | 1990-02-14 | ||
| JPH0866061A (ja) * | 1994-08-19 | 1996-03-08 | Mitsui Petrochem Ind Ltd | 超音波モータ |
| JP4072518B2 (ja) * | 2004-06-09 | 2008-04-09 | キヤノン株式会社 | 振動波駆動装置 |
-
2007
- 2007-06-27 JP JP2007169142A patent/JP5349768B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10498261B2 (en) | 2016-01-14 | 2019-12-03 | Canon Kabushiki Kaisha | Vibration-type actuator that moves vibrating body and driven body relatively to each other, and electronic apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009011058A (ja) | 2009-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101201261B1 (ko) | 진동파 구동장치 | |
| JP4756916B2 (ja) | 振動波モータ | |
| JP5641800B2 (ja) | 振動型駆動装置 | |
| JP2012016107A (ja) | 振動型駆動装置 | |
| JP5656429B2 (ja) | 振動波駆動装置 | |
| JP5349768B2 (ja) | 振動波駆動装置 | |
| JP4881064B2 (ja) | 振動型駆動装置 | |
| JP3566711B2 (ja) | 振動波駆動装置 | |
| JP2008048557A (ja) | 圧電アクチュエータ | |
| JP3444502B2 (ja) | 超音波リニアモータ | |
| JP4612798B2 (ja) | 動力伝達機構 | |
| KR100661311B1 (ko) | 압전 초음파 모터 | |
| JP4979017B2 (ja) | 超音波モータおよびそれに用いられる超音波振動子 | |
| JPH02311184A (ja) | 超音波モータ | |
| JP4316350B2 (ja) | 超音波モータ及び超音波モータ付電子機器 | |
| JP2004297872A (ja) | 振動アクチュエータ及びその製造方法 | |
| KR20030013927A (ko) | 선형 초음파모터의 하프-바이몰프형 진동자 | |
| JPS61173683A (ja) | 超音波駆動モ−タ | |
| JPH08223947A (ja) | 超音波モータ | |
| JP2000245175A (ja) | 振動アクチュエータ | |
| JPS62107688A (ja) | 小型アクチユエ−タ | |
| JP2011259557A (ja) | 振動型駆動装置による移動体の駆動機構 | |
| JP2009033791A (ja) | 超音波モータ | |
| JP2005020839A (ja) | マイクロモータ | |
| JP2006314175A (ja) | リニアモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100519 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120508 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120703 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121225 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130821 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5349768 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |