JP5170286B2 - 減速情報伝達装置、減速情報伝達方法 - Google Patents
減速情報伝達装置、減速情報伝達方法 Download PDFInfo
- Publication number
- JP5170286B2 JP5170286B2 JP2011119614A JP2011119614A JP5170286B2 JP 5170286 B2 JP5170286 B2 JP 5170286B2 JP 2011119614 A JP2011119614 A JP 2011119614A JP 2011119614 A JP2011119614 A JP 2011119614A JP 5170286 B2 JP5170286 B2 JP 5170286B2
- Authority
- JP
- Japan
- Prior art keywords
- deceleration
- deceleration information
- driver
- drive torque
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P1/00—Details of instruments
- G01P1/07—Indicating devices, e.g. for remote indication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0657—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
- B60W30/18127—Regenerative braking
Description
本発明の課題は、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することである。
《第1実施形態》
《構成》
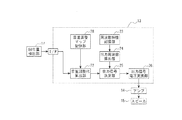
図1は、減速情報伝達装置のシステム構成図である。
本実施形態では、エンジントルクTeを検出するエンジントルクセンサ11と、例えばマイクロコンピュータで構成されたコントロールユニット13と、アンプ14と、スピーカ15と、を備える。
なお、エンジントルクセンサ11の代わりに、CAN通信によってエンジントルクTeを取得したり、エンジン回転数、変速比、車速等に基づいてエンジントルクTeを算出したりしてもよい。
コントロールユニット13は、音量調整一次式記憶部21と、音量調整代算出部22と、周波数特性記憶部23と、出力周波数算出部24と、出力信号決定部25と、出力信号電圧変換部26と、符号判定部27と、を備える。
コントロールユニット13は、減速時状況伝達制御処理を実行し、減速時状況(運転者の減速意図や車両の減速状態)に応じて音量が変わる音をリアルタイムにドライバに聞かせることで、ドライバに伝達する。音量はエンジントルクTeを表す信号を得て、エンジントルクが負値となるときに、そのエンジントルクTeに応じて決められた音量調整係数ktを用いて調整する。
図2は、減速時状況伝達制御処理を示すフローチャートである。
先ずステップS11では、エンジントルクTeを読込む。
続くステップS12では、エンジントルクTeが負値であるか否かを判定する。判定結果が『Te≧0』であれば、減速意図や減速状態を表す減速情報は不要であると判断し、そのまま所定のメインプログラムに復帰する。一方、判定結果が『Te<0』であれば、減速情報を運転者に伝達するためにステップS13に移行する。
続くステップS13では、音量調整一次式により、エンジントルクTeに応じた音量調整係数ktを算出する。音量調整一次式は、エンジントルクTeの絶対値が大きいほど(負側に大きいほど)、音量調整係数ktが大きくなるように設定してある。
音源データは、コントロールユニット13内に予め記憶されたwavファイルやmidiファイル等である。この音源データは、USB等の外部端子による変更及びプリセットされたファイルをセレクトでき、書き換え可能とする。
続くステップS15では、音量調整係数kt、エンジントルクの次数成分に応じた音色に応じて出力信号を生成する。
続くステップS16では、出力信号を電圧変換し、アンプ14へ出力し、スピーカ15を介して減速音を出力する。
運転者の減速意図及び車両の減速状態の少なくとも一方を、減速時状況として、音量でドライバに伝達する。
具体的には、エンジントルクTeが負値となるときに(S12の判定が“Yes”)、エンジントルクTeに応じて音量調整係数ktを算出し(S13)、この音量調整係数ktに応じて音量が調整した減速音を出力する(S14〜S16)。
このように、負値となるエンジントルクTeに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
以上より、エンジントルクセンサ11が「駆動トルク検出手段」に対応し、アンプ14、スピーカ15、及びステップS16の処理が「伝達手段」に対応し、コントロールユニット13が「減速情報設定手段」に対応する。
(1)減速情報伝達装置によれば、エンジントルクTeが負値であるときに、このエンジントルクTeに応じて、減速音の音量を調整し、運転者に伝達する。
このように、負値となるエンジントルクTeに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
これにより、運転者に対して容易に減速情報を伝達することができる。
(3)減速情報伝達方法によれば、エンジントルクTeが負値であるときに、このエンジントルクTeに応じて、減速音の音量を調整し、運転者に伝達する。
このように、負値となるエンジントルクTeに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
《構成》
本実施形態は、音量調整係数ktを算出する際、前述した音量調整一次式の代わりに、マップを参照するものである。
図3は、第2実施形態を示す減速情報伝達装置のシステム構成図である。
コントロールユニット13は、音量調整マップ記憶部28と、音量調整代算出部22と、周波数特性記憶部23と、出力周波数算出部24と、出力信号決定部25と、出力信号電圧変換部26と、符号判定部27と、を備える。
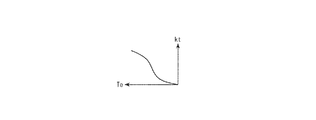
このマップによれば、エンジントルクTeが負側に大きいほど、音量調整係数ktが大きくなる。その特性線は逆S字状である。すなわち、エンジントルクTeに対する音量調整係数ktの増加率は、エンジントルクTeの絶対値が小さい領域と大きい領域では増加率が小さく、その中間の領域では増加率が大きくなるように設定してある。
エンジントルクTeが負値となるときに(S12の判定が“Yes”)、図4のマップを参照し、エンジントルクTeに応じて音量調整係数ktを算出し(S13)、この音量調整係数ktに応じて音量を調整する。
このように、負値となるエンジントルクTeに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
(1)減速情報伝達装置によれば、エンジントルクTeに応じて、音量調整係数ktが定まるマップを参照する。
このように、マップ制御とすることにより、自由度を持った音量制御を容易に行うことができる。
《構成》
本実施形態は、エンジントルクTeの絶対値が閾値thより大きいときに、減速音の音量調整を行うものである。
図5は、第3実施形態を示す減速情報伝達装置のシステム構成図である。
コントロールユニット13は、閾値記憶部31と、閾値比較部32と、周波数特性記憶部23と、出力周波数算出部24と、出力信号決定部25と、出力信号電圧変換部26と、符号判定部27と、を備える。
先ずステップS31では、エンジントルクTeを読込む。
続くステップS32では、エンジントルクTeが負値であるか否かを判定する。判定結果が『Te≧0』であれば、減速意図や減速状態を表す減速情報は不要であると判断し、そのまま所定のメインプログラムに復帰する。一方、判定結果が『Te<0』であれば、ステップS33に移行する。
ステップS34では、エンジントルクの次数成分に応じた音色(減速音)を設定する。
音源データは、コントロールユニット13内に予め記憶されたwavファイルやmidiファイル等である。この音源データは、USB等の外部端子による変更及びプリセットされたファイルをセレクトでき、書き換え可能とする。
続くステップS16では、出力信号を電圧変換し、アンプ14へ出力し、スピーカ15を介して減速音を出力する。
エンジントルクTeが負値となり(S32の判定が“Yes”)、且つエンジントルクTeの絶対値が閾値thを超えたときに(S33の判定が“Yes”)、減速音を出力する(S34〜S36)。
このように、負値となるエンジントルクTeに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
(1)エンジントルクTeが負値となり(S32の判定が“Yes”)、且つエンジントルクTeの絶対値が閾値thを超えたときに(S33の判定が“Yes”)、減速情報を運転者に伝達する。
このように、エンジントルクの絶対値|Te|が閾値thを超えたときに、減速音を出力することで、音で減速情報を伝達するという機能を維持したまま、制御ロジックを簡素化することができる。
《構成》
本実施形態は、車両の減速度に応じて、減速時状況の伝達度合を調整するものである。
図7は、第4実施形態を示す減速情報伝達装置のシステム構成図である。
本実施形態では、車速センサ16と、例えばマイクロコンピュータで構成されたコントロールユニット13と、アンプ14と、スピーカ15と、を備える。
コントロールユニット13は、減速度算出部33と、音量調整マップ記憶部28と、音量調整代算出部22と、周波数特性記憶部23と、出力周波数算出部24と、出力信号決定部25と、出力信号電圧変換部26と、を備える。
このマップによれば、減速度Gが大きいほど、音量調整係数ktが大きくなる。その特性線は逆S字状である。すなわち、減速度Gに対する音量調整係数ktの増加率は、減速度Gが小さい領域と大きい領域では増加率が小さく、その中間の領域では増加率が大きくなるように設定してある。
運転者の減速意図及び車両の減速状態の少なくとも一方を、減速時状況として、音量でドライバに伝達する。具体的には、減速度Gに応じて音量調整係数kgを算出し、この音量調整係数ktに応じて音量を調整する。
このように、減速度Gに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
すなわち、減速度Gの情報をリアルタイムで取得し、減速度Gが大きいほど、減速音を大きくする。このように、エンジンブレーキに伴う減速度Gで音量を制御することにより、車両の減速度に対して、より適切な音量に制御することができる。
以上より、減速度算出部33が「減速度検出手段」に対応する。
(1)車速に基づいて車両の減速度Gを算出し、この減速度Gに応じて、減速音の音量を調整し、運転者に伝達する。
このように、減速度Gに応じて減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
本実施形態では、車速センサ16からの信号に基づいて車両の減速度Gを算出しているが、勿論、加速度センサによって直接的に車両の減速度Gを検出してもよい。これによれば、減速度算出部33の処理を省略することができる。
《応用例2》
本実施形態では、減速度Gだけに応じて、減速音の音量を調整しているが、エンジントルクTe及び減速度Gに応じて、減速音の音量を調整してもよい。
具体的には、エンジントルクTeに応じて音量調整係数ktを算出すると共に、減速度Gに応じて音量調整係数kgを算出し、これら音量調整係数kt及びkgの積又は和を用いて、最終的な出力信号を生成してもよい。この場合、音量調整係数kt及びkgの重みは同一(1:1の関係)としてもよいし、夫々に異なる重み付けをしてもよい。
《構成》
本実施形態は、ハイブリッド車両(HEV)や電気車両(EV)における回生ブレーキの回生量に応じて、減速時状況の伝達度合を調整するものである。
図9は、第5実施形態を示す減速情報伝達装置のシステム構成図である。
本実施形態では、回生量検出部17と、例えばマイクロコンピュータで構成されたコントロールユニット13と、アンプ14と、スピーカ15と、を備える。
回生量検出部17は、回生ブレーキにおける例えば目標減速度や回生トルク指令値等を回生量Bとして検出する。
コントロールユニット13は、減速時状況伝達制御処理を実行し、減速時状況(運転者の減速意図や車両の減速状態)に応じて音量が変わる音をリアルタイムにドライバに聞かせることで、ドライバに伝達する。すなわち、図10のマップを参照し、回生量Bに応じて決められた音量調整係数kbを用いて調整する。
このマップによれば、回生量Bが大きいほど、音量調整係数kbが大きくなる。その特性線は逆S字状である。すなわち、回生量Bに対する音量調整係数kbの増加率は、回生量Bが小さい領域と大きい領域では増加率が小さく、その中間の領域では増加率が大きくなるように設定してある。
運転者の減速意図及び車両の減速状態の少なくとも一方を、減速時状況として、音量でドライバに伝達する。具体的には、回生量Bに応じて音量調整係数kbを算出し、この音量調整係数kbに応じて音量を調整する。
このように、車両の減速度と相関のある回生量Bを検出し、この回生量Bに応じて、減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
また、回生ブレーキシステムの回生量Bを利用しているので、エンジントルクや車速や減速度などを検出するセンサを新たに追加することなく、減速情報を運転者に伝達することができる。
以上より、回生量検出部17が「回生量検出手段」に対応する。
(1)回生ブレーキの回生量Bを算出し、この回生量Bに応じて、減速音の音量を調整し、運転者に伝達する。
このように、回生量Bに応じて減速時状況の伝達度合を調整しているので、運転者の減速意図や車両の減速状態などの減速時状況をより正確に伝達することができる。
本実施形態では、回生量Bだけに応じて、減速音の音量を調整しているが、エンジントルクTe及び回生量Bに応じて、減速音の音量を調整してもよい。
具体的には、エンジントルクTeに応じて音量調整係数ktを算出すると共に、回生量Bに応じて音量調整係数kbを算出し、これら音量調整係数kt及びkbの積又は和を用いて、最終的な出力信号を生成してもよい。この場合、音量調整係数kt及びkbの重みは同一(1:1の関係)としてもよいし、夫々に異なる重み付けをしてもよい。
《構成》
本実施形態は、ランプを介して減速状態を運転者に伝達するものである。
図11は、第6実施形態を示す減速情報伝達装置のシステム構成図である。
本実施形態では、エンジントルクセンサ11と、例えばマイクロコンピュータで構成されたコントロールユニット13と、信号受信部41と、電圧生成部42と、ランプ43と、を備える。
ランプ43は、運転者から視認可能な位置に設けてある。
コントロールユニット13は、音量調整マップ記憶部28と、閾値記憶部31と、閾値比較部32と、ランプ点灯信号生成部34と、を備える。
コントロールユニット13は、減速時状況伝達制御処理を実行し、減速時状況(運転者の減速意図や車両の減速状態)に応じてランプ43を点灯させることで、ドライバに伝達する。すなわち、エンジントルクTeが閾値thを超えたときに、ランプ43を点灯する。
本実施形態では、ランプ43の点灯によって、つまり表示によって減速時状況を運転者に伝達することができる。したがって、車外の影響や路面からの影響によって、音が聞こえにくい走行シーンでも、減速時状況を視覚によって運転者が認識できる。
《効果》
(1)減速情報伝達装置によれば、ランプ43を点灯することにより、減速情報を運転者に伝達する。
これにより、運転者に対して容易に減速情報を伝達することができる。また、車外の影響や路面からの影響によって、音が聞こえにくい走行シーンでも、減速時状況を視覚によって運転者が認識できる。
《構成》
本実施形態は、加振機を介して減速状態を運転者に伝達するものである。
図12は、第7実施形態を示す減速情報伝達装置のシステム構成図である。
本実施形態では、エンジントルクセンサ11と、例えばマイクロコンピュータで構成されたコントロールユニット13と、信号受信部51と、加振機52と、ランプ53と、を備える。
ランプ53は、運転者から視認可能な位置に設けてある。
コントロールユニット13は、音量調整マップ記憶部28と、閾値記憶部31と、閾値比較部32と、振動信号生成部35と、を備える。
コントロールユニット13は、減速時状況伝達制御処理を実行し、減速時状況(運転者の減速意図や車両の減速状態)に応じて加振機52を振動させると共に、ランプ53を点灯させることで、ドライバに伝達する。すなわち、エンジントルクTeが閾値thを超えたときに、加振機52を振動させると共に、ランプ53を点灯する。
本実施形態では、加振機52の振動とランプ53の点灯によって、減速時状況を運転者に伝達することができる。したがって、車外の影響や路面からの影響によって、音が聞こえにくい走行シーンでも、減速時状況を触覚と視覚によって運転者が認識できる。
《効果》
(1)減速情報伝達装置によれば、加振機52を振動させることにより、減速情報を運転者に伝達する。
これにより、運転者に対して容易に減速情報を伝達することができる。また、車外の影響や路面からの影響によって、音が聞こえにくい走行シーンでも、減速時状況を視覚によって運転者が認識できる。
13 コントロールユニット
14 アンプ
15 スピーカ
16 車速センサ
17 回生量検出部
21 音量調整一次式記憶部
22 音量調整代算出部
23 周波数特性記憶部
24 出力周波数算出部
25 出力信号決定部
26 出力信号電圧変換部
27 符号判定部
28 音量調整マップ記憶部
31 閾値記憶部
32 閾値比較部
33 減速度算出部
34 ランプ点灯信号生成部
35 振動信号生成部
41 信号受信部
42 電圧生成部
43 ランプ
51 信号受信部
52 加振機
53 ランプ
Claims (7)
- 回転駆動源の駆動トルクを検出する駆動トルク検出部と、
回生ブレーキの回生量を検出する回生量検出部と、
前記駆動トルク検出部で検出した駆動トルクが負値であるときに、前記駆動トルク、及び前記回生量検出部で検出した回生量に応じて、運転者の減速意図及び車両の減速状態の少なくとも一方を表す減速情報を設定する減速情報設定部と、
前記減速情報設定部で設定した減速情報を運転者に伝達する伝達部と、を備えることを特徴とする減速情報伝達装置。 - 前記減速情報設定部は、前記駆動トルク検出部で検出した駆動トルクが負値で、且つ前記駆動トルクの絶対値が、予め定められた閾値よりも大きいときに、前記減速情報を設定することを特徴とする請求項1に記載の減速情報伝達装置。
- 前記伝達部は、スピーカによって減速音を出力することにより、前記減速情報を運転者に伝達することを特徴とする請求項1又は2に記載の減速情報伝達装置。
- 前記伝達部は、表示装置によって減速状態を表示することにより、前記減速情報を運転者に伝達することを特徴とする請求項1〜3の何れか一項に記載の減速情報伝達装置。
- 前記伝達部は、加振機によってステアリング操作子を振動させることにより、前記減速情報を運転者に伝達することを特徴とする請求項1〜4の何れか一項に記載の減速情報伝達装置。
- 前記減速情報設定部は、前記駆動トルク検出部で検出した駆動トルクに応じて、前記減速情報が定まるマップを参照することを特徴とする請求項1〜5の何れか一項に記載の減速情報伝達装置。
- 回転駆動源の駆動トルクを検出し、回生ブレーキの回生量を検出し、前記駆動トルクが負値であるときに、前記駆動トルク及び前記回生量に応じて、運転者の減速意図及び車両の減速状態の少なくとも一方を表す減速情報を運転者に伝達することを特徴とする減速情報伝達方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011119614A JP5170286B2 (ja) | 2011-05-27 | 2011-05-27 | 減速情報伝達装置、減速情報伝達方法 |
| PCT/JP2012/001187 WO2012164784A1 (ja) | 2011-05-27 | 2012-02-22 | 減速情報伝達装置、減速情報伝達方法 |
| CN201280025357.4A CN103702869B (zh) | 2011-05-27 | 2012-02-22 | 减速信息传递装置、减速信息传递方法 |
| EP12793872.8A EP2716501B1 (en) | 2011-05-27 | 2012-02-22 | Deceleration information transmission device and deceleration information transmission method |
| US14/119,579 US9229022B2 (en) | 2011-05-27 | 2012-02-22 | Deceleration information notification device and deceleration information notification method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011119614A JP5170286B2 (ja) | 2011-05-27 | 2011-05-27 | 減速情報伝達装置、減速情報伝達方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012245903A JP2012245903A (ja) | 2012-12-13 |
| JP2012245903A5 JP2012245903A5 (ja) | 2013-01-31 |
| JP5170286B2 true JP5170286B2 (ja) | 2013-03-27 |
Family
ID=47258663
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011119614A Active JP5170286B2 (ja) | 2011-05-27 | 2011-05-27 | 減速情報伝達装置、減速情報伝達方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9229022B2 (ja) |
| EP (1) | EP2716501B1 (ja) |
| JP (1) | JP5170286B2 (ja) |
| CN (1) | CN103702869B (ja) |
| WO (1) | WO2012164784A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7291296B2 (ja) | 2019-11-29 | 2023-06-14 | 功平 羅 | エッジオープン缶切り |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6186619B2 (ja) * | 2013-12-25 | 2017-08-30 | 三菱自動車工業株式会社 | 電動車両のストップランプ点灯制御装置 |
| JP6186618B2 (ja) * | 2013-12-25 | 2017-08-30 | 三菱自動車工業株式会社 | 電動車両のストップランプ点灯制御装置 |
| JP6424614B2 (ja) * | 2014-12-22 | 2018-11-21 | 三菱自動車工業株式会社 | ストップランプの制御装置 |
| DE102016216590A1 (de) | 2016-09-01 | 2018-03-01 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, Vorrichtung und Computerprogramm zur Erzeugung und Übermittlung einer Fahrerinformation |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3753511B2 (ja) * | 1997-08-27 | 2006-03-08 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3896240B2 (ja) * | 2000-03-24 | 2007-03-22 | 住友電工ブレーキシステムズ株式会社 | 回生協調ブレーキシステムの制御方法 |
| US6559762B1 (en) * | 2002-01-02 | 2003-05-06 | Ford Global Technologies, Llc | Multi channel braking notification system |
| JP3747857B2 (ja) * | 2002-01-31 | 2006-02-22 | トヨタ自動車株式会社 | 車両の減速度表示制御装置 |
| JP3949047B2 (ja) * | 2002-11-05 | 2007-07-25 | ダイハツ工業株式会社 | 車両の制御装置 |
| JP3915699B2 (ja) * | 2002-12-27 | 2007-05-16 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド車輌の制御装置 |
| JP4173891B2 (ja) | 2005-03-22 | 2008-10-29 | 本田技研工業株式会社 | 移動体用効果音発生装置 |
| JP4715351B2 (ja) * | 2005-07-19 | 2011-07-06 | 株式会社デンソー | ステアリング制御システム |
| DE102005044455A1 (de) * | 2005-09-17 | 2007-05-03 | Bayerische Motoren Werke Ag | Verfahren zum Warnen des Fahrers eines mit einem Fahrgeschwindigkeitsregelsystem ausgestatteten Kraftfahrzeugs |
| JP4221418B2 (ja) * | 2006-03-24 | 2009-02-12 | 本田技研工業株式会社 | 車両用効果音発生装置 |
| US8059829B2 (en) | 2006-03-24 | 2011-11-15 | Honda Motor Co., Ltd. | Sound effect producing apparatus for vehicle |
| JP4894546B2 (ja) * | 2007-02-14 | 2012-03-14 | 株式会社デンソー | 制御用情報記憶装置及びプログラム |
| JP2009177860A (ja) * | 2008-01-21 | 2009-08-06 | Toyota Motor Corp | 車両の制御装置およびそれを備える車両 |
| JP4495234B2 (ja) * | 2008-07-31 | 2010-06-30 | 富士通テン株式会社 | 省燃費運転診断装置、省燃費運転診断システム及び省燃費運転診断方法 |
| US8055422B2 (en) * | 2008-08-08 | 2011-11-08 | GM Global Technology Operations LLC | Vehicle deceleration rate control method and apparatus |
| JP4602444B2 (ja) | 2008-09-03 | 2010-12-22 | 株式会社日立製作所 | ドライバ運転技能支援装置及びドライバ運転技能支援方法 |
| JP5304274B2 (ja) * | 2009-01-29 | 2013-10-02 | 日産自動車株式会社 | 車両用制動制御装置 |
| JP5526717B2 (ja) * | 2009-02-27 | 2014-06-18 | 日産自動車株式会社 | 車両用運転操作補助装置、車両用運転操作補助方法および自動車 |
| JP4670978B2 (ja) * | 2009-03-11 | 2011-04-13 | 株式会社デンソー | 省燃費運転支援装置、プログラム |
| US8311718B2 (en) * | 2009-09-04 | 2012-11-13 | GM Global Technology Operations LLC | Negative wheel slip control systems and methods |
-
2011
- 2011-05-27 JP JP2011119614A patent/JP5170286B2/ja active Active
-
2012
- 2012-02-22 US US14/119,579 patent/US9229022B2/en active Active
- 2012-02-22 EP EP12793872.8A patent/EP2716501B1/en active Active
- 2012-02-22 WO PCT/JP2012/001187 patent/WO2012164784A1/ja active Application Filing
- 2012-02-22 CN CN201280025357.4A patent/CN103702869B/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7291296B2 (ja) | 2019-11-29 | 2023-06-14 | 功平 羅 | エッジオープン缶切り |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140097950A1 (en) | 2014-04-10 |
| CN103702869B (zh) | 2016-08-31 |
| JP2012245903A (ja) | 2012-12-13 |
| EP2716501A4 (en) | 2016-01-20 |
| WO2012164784A1 (ja) | 2012-12-06 |
| EP2716501A1 (en) | 2014-04-09 |
| EP2716501B1 (en) | 2020-06-17 |
| US9229022B2 (en) | 2016-01-05 |
| CN103702869A (zh) | 2014-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5958646B2 (ja) | 車両用音響制御装置、車両用音響制御方法 | |
| JP5170286B2 (ja) | 減速情報伝達装置、減速情報伝達方法 | |
| EP2746125B1 (en) | Vehicle turning efficiency improving apparatus | |
| EP2866225B1 (en) | Apparatus and method for controlling virtual engine sound in response to auto-cruise speed settings | |
| JP2010155507A (ja) | エンジン回転数算出装置及びエンジン音生成装置 | |
| EP3342633A1 (en) | Control device for electric vehicle | |
| CN104859533A (zh) | 用于人工地改变机动车的感觉到的马达噪音的系统 | |
| EP3360724A1 (en) | Electric vehicle control device, electric vehicle control system, and electric vehicle control method | |
| JP5958647B2 (ja) | 車両用音響制御装置、車両用音響制御方法 | |
| JP2009205635A (ja) | 発進情報提供装置および発進情報提供方法 | |
| JP2019033659A (ja) | 二輪車の駆動モータのための制御方法、制御器、制御器を備える二輪車、ルートデータを生成する方法、およびデータ担体 | |
| JP2012245903A5 (ja) | ||
| JP5201225B2 (ja) | 加速情報伝達装置 | |
| KR102373413B1 (ko) | 하이브리드 차량의 제어방법 | |
| JP7421725B2 (ja) | 車両用音生成装置 | |
| US20220319491A1 (en) | Vehicle sound generation device | |
| JP2014152733A (ja) | 車両走行制御装置 | |
| JP7207031B2 (ja) | 電動車両の制御装置 | |
| JP2022155835A (ja) | 車両用音生成装置 | |
| JP2022155834A (ja) | 車両用音生成装置 | |
| JP2023021660A (ja) | 遠隔運転システム | |
| JP5614541B2 (ja) | 電動車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121108 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20121108 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20121126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5170286 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |