JP5160468B2 - 建設機械の荷重計測装置 - Google Patents
建設機械の荷重計測装置 Download PDFInfo
- Publication number
- JP5160468B2 JP5160468B2 JP2009033094A JP2009033094A JP5160468B2 JP 5160468 B2 JP5160468 B2 JP 5160468B2 JP 2009033094 A JP2009033094 A JP 2009033094A JP 2009033094 A JP2009033094 A JP 2009033094A JP 5160468 B2 JP5160468 B2 JP 5160468B2
- Authority
- JP
- Japan
- Prior art keywords
- load
- construction machine
- speed
- final
- vehicle body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/10—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles having fluid weight-sensitive devices
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Vehicle Body Suspensions (AREA)
Description
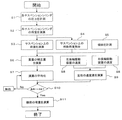
図1乃至図4は、本発明の建設機械の荷重計測装置の実施の形態を示すもので、図1は本発明の荷重計測装置が適用される建設機械の一例であるダンプトラックの側面図、図2は本発明の建設機械の荷重計測装置の一実施の形態を示す構成図、図3は本発明の建設機械の荷重計測装置の一実施の形態の機能構成図、図4は本発明の建設機械の荷重計測装置の一実施の形態の処理フロー図である。
図2は、本発明の建設機械の荷重計測装置の一実施の形態に係る処理装置の構成を示す構成図、図3は、図2に示す本発明の建設機械の荷重計測装置の一実施の形態に係る処理装置の機能構成を示すブロック図であり、これらの図において、図1に示す符号と同符号のものは同一部分であるので、その詳細な説明は省略する。
なお、図4は、本発明の建設機械の荷重計測装置の一実施の形態の処理フローを示す図である。
上述した本発明の実施の形態によれば、建設機械が曲線状の経路を走行している際には、その際に計測した積載荷重の出力を無効にするので、建設機械の走行中における積載荷重の計測の精度が向上する。その結果、建設機械の生産性の管理が向上する。
2 運転室
3 ボディ
4 ボディ操作シリンダ4
5a 前側のサスペンションシリンダ
5b 後側のサスペンションシリンダ
6a 圧カセンサ
6b 圧カセンサ
8a 後輪速度検出器
8b 後輪速度検出器
9 車体速度検出器
10 荷重計測装置の処理装置
11 演算部
14 読み込み専用のメモリ(ROM)
15 ランダムアクセスメモリ(RAM)
110 積載荷重演算手段
130 最終積載量確認手段
134 最終確認演算部
Claims (4)
- 建設機械のボディに積載した積載荷重を、圧力センサによって前側サスペンションシリンダ、及び後側サスペンションシリンダのシリンダ圧を取込んで演算する処理装置を備えた建設機械の荷重計測装置において、
前記建設機械の左右の後輪の速度をそれぞれ検出する後輪速度検出器と、
前記各後輪速度検出器からの速度差を検出する速度差検出器と、
車体の速度を検出する車体速度検出器と、
前記処理装置からの積載荷重Wを一定の時間内で数回サンプリング計測する積載荷重Wの振れ幅計測部と、
前記積載荷重Wの振れ幅計測部からの計測値の平均値を求め、この平均値に対し最大計測値と最小計測値の差が最小になったことを確認する積載荷重の最小振れ幅確認部と、
前記車体速度検出器からの車体の速度が予め設定した設定値以上に達した場合(条件1)と,前記積載荷重の最小振れ幅確認部からの積載荷重が最小振れ幅内である場合(条件2)と,前記速度差検出器からの左右の後輪の速度の差が予め設定した設定値より小さい場合(条件3)とが満たされた場合に、前記処理装置で演算した積載荷重Wを最終の積載荷重として出力し、前記条件のいずれか1つが満たされていない場合に、前記処理装置で演算した積載荷重Wを最終の積載荷重の出力として無効とする最終確認演算部を有する最終積載荷重確認手段とを備えた
ことを特徴とする建設機械の荷重計測装置。 - 請求項1に記載の建設機械の荷重計測装置において、
前記最終積載荷重確認手段における前記最終確認演算部は、前記車体速度検出器からの車体の速度を数回取込み、その平均値処理後、数秒間の速度変化が設定値以内であれば、条件1が満たされたとして扱う手段を更に備えた
ことを特徴とする建設機械の荷重計測装置。 - 請求項1に記載の建設機械の荷重計測装置において、
前記最終積載荷重確認手段における前記最終確認演算部は、前記速度差検出器からの後輪速度検出器からの各速度の差が前記設定値よりも小さい値で、数秒後に前述した条件1,2が満たされていれば、前記処理装置からの積載荷重Wを最終の積載荷重として出力する手段を更に備えた
ことを特徴とする建設機械の荷重計測装置。 - 請求項1乃至3のいずれかに記載の建設機械の荷重計測装置において、
前記建設機械は、ボディに積載した積載荷を移送するダンプトラックである
ことを特徴とする建設機械の荷重計測装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009033094A JP5160468B2 (ja) | 2009-02-16 | 2009-02-16 | 建設機械の荷重計測装置 |
| US12/699,233 US8437982B2 (en) | 2009-02-16 | 2010-02-03 | Apparatus for measuring load of construction machine |
| CN201010115293.XA CN101806610B (zh) | 2009-02-16 | 2010-02-11 | 工程机械的载重计测装置 |
| AU2010200508A AU2010200508B2 (en) | 2009-02-16 | 2010-02-11 | Apparatus for measuring load of construction machine |
| US13/666,491 US20130185019A1 (en) | 2009-02-16 | 2012-11-01 | Apparatus for measuring load of construction machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009033094A JP5160468B2 (ja) | 2009-02-16 | 2009-02-16 | 建設機械の荷重計測装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010190617A JP2010190617A (ja) | 2010-09-02 |
| JP2010190617A5 JP2010190617A5 (ja) | 2012-08-23 |
| JP5160468B2 true JP5160468B2 (ja) | 2013-03-13 |
Family
ID=42560684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009033094A Active JP5160468B2 (ja) | 2009-02-16 | 2009-02-16 | 建設機械の荷重計測装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US8437982B2 (ja) |
| JP (1) | JP5160468B2 (ja) |
| CN (1) | CN101806610B (ja) |
| AU (1) | AU2010200508B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025362A1 (ja) * | 2013-08-20 | 2015-02-26 | 日立建機株式会社 | ダンプトラック |
| WO2016181697A1 (ja) * | 2015-05-13 | 2016-11-17 | 日立建機株式会社 | 作業機械の荷重計測装置 |
| US10317273B2 (en) | 2015-05-26 | 2019-06-11 | Hitachi Construction Machinery Co., Ltd. | Load measuring apparatus for construction machine |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5160468B2 (ja) * | 2009-02-16 | 2013-03-13 | 日立建機株式会社 | 建設機械の荷重計測装置 |
| US8755977B2 (en) * | 2012-09-21 | 2014-06-17 | Siemens Industry, Inc. | Method and system for preemptive load weight for mining excavating equipment |
| DE102013201630A1 (de) * | 2013-01-31 | 2014-07-31 | Siemens Aktiengesellschaft | Bremseinheit für ein Fahrzeug und Fahrzeug mit einer derartigen Bremseinheit |
| US9303715B2 (en) | 2013-03-10 | 2016-04-05 | Oshkosh Defense, Llc | Limiting system for a vehicle suspension component |
| DE102013103312A1 (de) | 2013-04-03 | 2014-10-09 | Schmitz Cargobull Gotha GmbH | Wiegesystem und Verfahren zum Wiegen einer Ladung eines Kippsattelzugs |
| US9109942B2 (en) | 2013-04-15 | 2015-08-18 | Caterpillar Inc. | Method of calculating payload material weight and machine using same |
| JP5997720B2 (ja) * | 2014-03-31 | 2016-09-28 | 日立建機株式会社 | 建設機械の荷重計測装置 |
| GB201503872D0 (en) * | 2015-03-06 | 2015-04-22 | Hyva Holding Bv | Method and system for operating a tipper |
| JP2018077810A (ja) * | 2016-11-11 | 2018-05-17 | 富士通株式会社 | 積載判定プログラム、積載判定方法及び積載判定装置 |
| JP6737202B2 (ja) * | 2017-02-16 | 2020-08-05 | 株式会社島津製作所 | フォークリフト |
| US10752075B1 (en) * | 2017-04-28 | 2020-08-25 | Oshkosh Defense, Llc | Systems and methods for determining vehicle characteristics |
| CN110646072A (zh) * | 2019-09-29 | 2020-01-03 | 武汉依迅电子信息技术有限公司 | 施工车的载重量测量方法及装置 |
| KR102340301B1 (ko) * | 2020-01-28 | 2021-12-15 | 전형율 | 컨테이너 자동 잠금장치 |
| CN112757996B (zh) * | 2021-02-26 | 2022-09-09 | 苏州市正和汽车贸易有限公司 | 一种螺旋输送机卸料的pta运输车 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5182712A (en) * | 1990-09-14 | 1993-01-26 | Caterpillar Inc. | Dynamic payload monitor |
| US5376760A (en) * | 1993-04-26 | 1994-12-27 | Horsley; Charles L. | Truck load indicator apparatus |
| JP3524605B2 (ja) * | 1994-12-13 | 2004-05-10 | 西松建設株式会社 | 無人排土搬出車両及び無人排土計量方法 |
| JP3441564B2 (ja) * | 1995-07-07 | 2003-09-02 | 本田技研工業株式会社 | 後輪転舵装置の制御方法 |
| US6044313A (en) * | 1997-11-26 | 2000-03-28 | Caterpillar Inc. | Method and apparatus for monitoring ton-miles-per-hour for tires on a mobile machine |
| DE19837380A1 (de) * | 1998-08-18 | 2000-02-24 | Zahnradfabrik Friedrichshafen | Verfahren und Einrichtung zur Ermittlung der Masse eines Fahrzeuges |
| JP2000198402A (ja) * | 1999-01-05 | 2000-07-18 | Sumitomo Electric Ind Ltd | 物体検出装置 |
| JP2002037405A (ja) * | 2000-07-26 | 2002-02-06 | Sumitomo Metal Ind Ltd | ごみ発生情報収集システムおよびごみ収集車 |
| FR2814238B1 (fr) * | 2000-09-15 | 2004-06-25 | Dufournier Technologies S A S | Procede et systeme ou centrale de surveillance de l'etat des pneumatiques, et de detection de presence de chaines ou ou clous a neige, sur un vehicule |
| DE10243516A1 (de) * | 2002-09-19 | 2004-04-01 | Robert Bosch Gmbh | Vorrichtung zur Bestimmung einer Gesamtmasse eines Fahrzeugs |
| JP4433688B2 (ja) * | 2003-02-12 | 2010-03-17 | 日本精工株式会社 | 転がり軸受ユニットの荷重測定装置及び荷重測定用転がり軸受ユニット |
| JP2005008094A (ja) * | 2003-06-20 | 2005-01-13 | Honda Motor Co Ltd | タイヤ空気圧低下検知装置の閾値設定方法 |
| JP2005043267A (ja) * | 2003-07-24 | 2005-02-17 | Hitachi Constr Mach Co Ltd | 建設機械の荷重計測装置 |
| JP2005084003A (ja) * | 2003-09-11 | 2005-03-31 | Honda Motor Co Ltd | タイヤ空気圧検知装置 |
| US7247803B2 (en) * | 2004-01-15 | 2007-07-24 | Komatsu Ltd. | Loaded weight measurement method and loaded weight measurement device for dump truck |
| JP4161923B2 (ja) * | 2004-03-09 | 2008-10-08 | 株式会社デンソー | 車両安定化制御システム |
| US20090102277A1 (en) * | 2005-08-24 | 2009-04-23 | Toshiki Ezoe | Automatic Brake Control Device |
| JP2007210592A (ja) * | 2005-10-28 | 2007-08-23 | Hino Motors Ltd | 自動制動制御装置 |
| US20100198491A1 (en) * | 2009-02-05 | 2010-08-05 | Paccar Inc | Autonomic vehicle safety system |
| JP5160468B2 (ja) * | 2009-02-16 | 2013-03-13 | 日立建機株式会社 | 建設機械の荷重計測装置 |
-
2009
- 2009-02-16 JP JP2009033094A patent/JP5160468B2/ja active Active
-
2010
- 2010-02-03 US US12/699,233 patent/US8437982B2/en active Active - Reinstated
- 2010-02-11 CN CN201010115293.XA patent/CN101806610B/zh active Active
- 2010-02-11 AU AU2010200508A patent/AU2010200508B2/en active Active
-
2012
- 2012-11-01 US US13/666,491 patent/US20130185019A1/en not_active Abandoned
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025362A1 (ja) * | 2013-08-20 | 2015-02-26 | 日立建機株式会社 | ダンプトラック |
| JP6027248B2 (ja) * | 2013-08-20 | 2016-11-16 | 日立建機株式会社 | ダンプトラック |
| WO2016181697A1 (ja) * | 2015-05-13 | 2016-11-17 | 日立建機株式会社 | 作業機械の荷重計測装置 |
| JP2016212055A (ja) * | 2015-05-13 | 2016-12-15 | 日立建機株式会社 | 作業機械の荷重計測装置 |
| US10337909B2 (en) | 2015-05-13 | 2019-07-02 | Hitachi Construction Machinery Co., Ltd. | Load measuring apparatus for a working machine |
| US10317273B2 (en) | 2015-05-26 | 2019-06-11 | Hitachi Construction Machinery Co., Ltd. | Load measuring apparatus for construction machine |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2010200508B2 (en) | 2011-07-21 |
| CN101806610A (zh) | 2010-08-18 |
| CN101806610B (zh) | 2014-01-08 |
| AU2010200508A1 (en) | 2010-09-02 |
| US8437982B2 (en) | 2013-05-07 |
| JP2010190617A (ja) | 2010-09-02 |
| US20130185019A1 (en) | 2013-07-18 |
| US20100211356A1 (en) | 2010-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5160468B2 (ja) | 建設機械の荷重計測装置 | |
| WO2016189654A1 (ja) | 建設機械の荷重計測装置 | |
| EP3165885B1 (en) | Load weighing method and system for wheel loader | |
| US8155798B2 (en) | Method and device for determining the roll angle of a motorcycle | |
| JP5457201B2 (ja) | 車両タイヤのタイヤ空気圧偏差検出におけるサスペンション情報の使用 | |
| US10337909B2 (en) | Load measuring apparatus for a working machine | |
| JP2010190617A5 (ja) | ||
| US8700274B1 (en) | Method of determining when a bed of a hauling machine is empty | |
| US8903612B2 (en) | Method of determining when a payload loading event is occurring in a hauling machine | |
| WO2014156903A1 (ja) | 運搬車両 | |
| JP2006273108A (ja) | 車両状態検出装置 | |
| WO2014176063A1 (en) | Method of estimating mass of a payload in a hauling machine | |
| JP5680940B2 (ja) | トラックスケールにおける被計量車両の重心位置計測装置 | |
| US8019516B2 (en) | Method for measuring the useful load of a telehandler | |
| JP5997720B2 (ja) | 建設機械の荷重計測装置 | |
| JP3852840B2 (ja) | 車両の積載重量計測装置 | |
| KR102556402B1 (ko) | 건설기계에서의 지면 경사각 측정 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110624 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120628 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120628 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5160468 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151221 Year of fee payment: 3 |