JP5124579B2 - 表面感知デバイス - Google Patents
表面感知デバイス Download PDFInfo
- Publication number
- JP5124579B2 JP5124579B2 JP2009527191A JP2009527191A JP5124579B2 JP 5124579 B2 JP5124579 B2 JP 5124579B2 JP 2009527191 A JP2009527191 A JP 2009527191A JP 2009527191 A JP2009527191 A JP 2009527191A JP 5124579 B2 JP5124579 B2 JP 5124579B2
- Authority
- JP
- Japan
- Prior art keywords
- probe
- rotation
- axis
- support
- sensing device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000523 sample Substances 0.000 claims abstract description 179
- 238000000034 method Methods 0.000 claims description 13
- 230000003213 activating effect Effects 0.000 claims description 2
- 241001422033 Thestylus Species 0.000 description 56
- 238000010586 diagram Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 6
- 229910003460 diamond Inorganic materials 0.000 description 4
- 239000010432 diamond Substances 0.000 description 4
- 125000006850 spacer group Chemical group 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000004886 head movement Effects 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
- G01B5/008—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points using coordinate measuring machines
- G01B5/012—Contact-making feeler heads therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/004—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring coordinates of points
- G01B7/008—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring coordinates of points using coordinate measuring machines
- G01B7/012—Contact-making feeler heads therefor
Description
機械の可動アームに支持体を取り付けるための取付手段と、
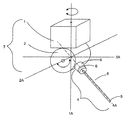
第1回転軸まわりに取付手段に対して回転可能である第1部材であって、前記回転が第1モーターによって生じさせられる第1部材と、第2回転軸まわりに第1部材に対して回転可能である第2部材であって、前記回転が第2モーターによって生じさせられる第2部材とを有する支持体であって、第2回転軸は、第1回転軸を横切り、表面感知デバイスが、第2部材に、それとともに回転するために取り付けられる、支持体と、
被加工物の表面を感知するための表面感知デバイスと、
第3回転軸まわりの支持体に対する表面感知デバイスの回転を可能にするための回転手段であって、第3回転軸は第1回転軸と合わさることが可能である、回転手段と
を備え、
第1回転軸および第3回転軸が合わせられるとき、表面感知デバイスに対する支持体の回転は、第1モーターによって作動可能であることを特徴とする、
被加工物の表面を測定するための装置を提供する。
該方法は、
第1回転軸および第3回転軸を合わせるステップと、そして、
表面感知デバイスに対する支持体の回転を作動させるように、第1モーターを作動させるステップと
を含むことを特徴とする、方法を提供する。
Claims (34)
- 支持体と、
機械の可動アームに該支持体を取り付けるための取付手段と、
被加工物の表面を感知するための単一方向性プローブまたは表面仕上げプローブと、
第1回転軸まわりに前記取付手段に対して回転可能であって第1モーターによって動かされることができる第1部材と、第2回転軸まわりに前記第1部材に対して回転可能であって第2モーターによって動かされることができる第2部材とを有する前記支持体であって、前記第2回転軸は、前記第1回転軸を横切り、前記単一方向性プローブまたは表面仕上げプローブが、前記第2部材に、それとともに回転するために取り付けられることができる、前記支持体と
を備え、
回転手段が、第3回転軸まわりの前記支持体に対する前記単一方向性プローブまたは表面仕上げプローブの回転を可能にするために設けられている
ことを特徴とする被加工物の表面を測定するための装置。 - 前記単一方向性プローブまたは表面仕上げプローブは、前記第3回転軸に対して横切る方向における表面あるいは前記第3回転軸からずれた表面を感知することを特徴とする請求項1に記載の被加工物の表面を測定するための装置。
- 前記支持体の前記第1回転軸および前記第2回転軸は、直交することを特徴とする請求項1または2に記載の装置。
- 前記第3回転軸のまわりに前記単一方向性プローブまたは表面仕上げプローブは回転可能であり、前記第3回転軸は前記支持体の前記第2軸に交わることを特徴とする請求項1から3のいずれかに記載の装置。
- 前記第3回転軸のまわりに前記単一方向性プローブまたは表面仕上げプローブは回転可能であり、前記第3回転軸は前記単一方向性プローブまたは表面仕上げプローブの概ね長手方向の軸であることを特徴とする請求項1から4のいずれかに記載の装置。
- 前記単一方向性プローブまたは表面仕上げプローブは、接触プローブおよび非接触プローブの少なくとも一方であることを特徴とする請求項1から5のいずれかに記載の装置。
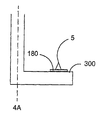
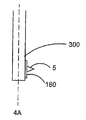
- 前記単一方向性プローブまたは表面仕上げプローブは、プローブ本体、スタイラス、およびスタイラス先端部を備えることを特徴とする請求項1から6のいずれかに記載の装置。
- 前記回転手段は、前記単一方向性プローブまたは表面仕上げプローブに、360度以下までまたは360度を越えてのうちの少なくとも一方の範囲で回転することを可能にすることを特徴とする請求項1から7のいずれかに記載の装置。
- 前記回転手段は、前記単一方向性プローブまたは表面仕上げプローブに、連続して回転することを可能にすることを特徴とする請求項1から7のいずれかに記載の装置。
- 前記回転手段は、モーターであることを特徴とする請求項1から9のいずれかに記載の装置。
- 前記単一方向性プローブはレーザースポットプローブおよびレーザー線プローブの少なくとも一方であることを特徴とする請求項1から10のいずれかに記載の装置。
- 前記表面仕上げプローブは前記単一方向性プローブであることを特徴とする請求項1から11のいずれかに記載の被加工物の表面を測定するための装置。
- 被加工物の表面を測定するための装置を用いるための方法であって、
該装置は、
支持体と、
機械の可動アームに該支持体を取り付けるための取付手段と、
被加工物の表面を感知するための単一方向性プローブまたは表面仕上げプローブと、
第1回転軸まわりに前記取付手段に対して回転可能であって第1モーターによって動かされることができる第1部材と、第2回転軸まわりに前記第1部材に対して回転可能であって第2モーターによって動かされることができる第2部材とを有する前記支持体であって、前記第2回転軸は、前記第1回転軸を横切り、前記単一方向性プローブまたは表面仕上げプローブが、前記第2部材に、それとともに回転するために取り付けられることができる、前記支持体と、
第3回転軸まわりの前記支持体に対する前記単一方向性プローブまたは表面仕上げプローブの回転を可能にするための回転手段と
を備え、
該方法は、前記支持体に対して前記前記単一方向性プローブまたは表面仕上げプローブを方向付けるように前記回転手段を作動させるステップを含むことを特徴とする方法。 - 前記表面仕上げプローブは前記単一方向性プローブであることを特徴とする請求項13に記載の方法。
- 前記被加工物の前記表面に沿って前記表面仕上げプローブまたは単一方向性プローブを動かすステップと、そして、
前記被加工物の表面に関する情報を集めるステップと
をさらに含むことを特徴とする請求項13または14に記載の方法。 - 被加工物をスキャンすることを含むことを特徴とする請求項15に記載の方法。
- 被加工物の表面を測定するための装置であって、
支持体と、
機械の可動アームに該支持体を取り付けるための取付手段と、
被加工物の表面を感知するための表面感知デバイスと、
第1回転軸まわりに前記取付手段に対して回転可能であって第1モーターによって動かされる第1部材と、第2回転軸まわりに前記第1部材に対して回転可能であって第2モーターによって動かされる第2部材とを有する前記支持体であって、前記第2回転軸は、前記第1回転軸を横切り、前記表面感知デバイスが、前記第2部材に、それとともに回転するために取り付けられる、前記支持体と、
第3回転軸まわりの前記支持体に対する前記表面感知デバイスの回転を可能にするための回転手段であって、該第3回転軸は前記第1回転軸と合わさることが可能である、回転手段と
を備え、
前記第1回転軸および前記第3回転軸が合わせられるとき、前記表面感知デバイスに対する前記支持体の回転は、前記第1モーターによって作動可能であることを特徴とする装置。 - ホルダーが、前記表面感知デバイスに対する前記支持体の前記回転の間、前記表面感知デバイスを動かないように保持するために提供されることを特徴とする請求項17に記載の装置。
- ピンが、前記ホルダーおよび前記表面感知デバイスの一方に設けられ、前記表面感知デバイスに対する前記支持体の前記回転の間、該表面感知デバイスを動かないように保持するために、前記ホルダーおよび前記表面感知デバイスの他方に関する少なくとも1つの凹部と係合可能であることを特徴とする請求項18に記載の装置。
- 前記支持体の前記第1回転軸および前記第2回転軸は、直交することを特徴とする請求項17から19のいずれかに記載の装置。
- 前記表面感知デバイスの前記第3回転軸は、前記支持体の前記第2軸に交わることを特徴とする請求項17から20のいずれかに記載の装置。
- 前記表面感知デバイスの前記第3回転軸は、前記表面感知デバイスの概ね長手方向の軸であることを特徴とする請求項17から21のいずれかに記載の装置。
- 前記表面感知デバイスは、前記第3回転軸に対して横切る方向における表面あるいは前記第3回転軸からずれた表面を感知することを特徴とする請求項17から22のいずれかに記載の装置。
- 前記表面感知デバイスは、接触プローブであることを特徴とする請求項17から23のいずれかに記載の装置。
- 前記表面感知デバイスは、非接触プローブであることを特徴とする請求項17から24のいずれかに記載の装置。
- 前記表面感知デバイスは、プローブ本体、スタイラス、およびスタイラス先端部を備えることを特徴とする請求項17から25のいずれかに記載の装置。
- 前記表面感知デバイスは、表面仕上げプローブを備えることを特徴とする請求項17から26のいずれかに記載の装置。
- 前記回転手段は、前記デバイスに、最大で360度まで回転することを可能にすることを特徴とする請求項17から27のいずれかに記載の装置。
- 前記回転手段は、前記デバイスに、360度を越えてまで回転することを可能にすることを特徴とする請求項17から27のいずれかに記載の装置。
- 前記回転手段は、前記デバイスに、連続して回転することを可能にすることを特徴とする請求項17から27のいずれかに記載の装置。
- 前記回転手段は、付加的に手動で作動可能であることを特徴とする請求項17から30のいずれかに記載の装置。
- 被加工物の表面を測定するための装置を用いるための方法であって、
該装置は、
支持体と、
機械の可動アームに該支持体を取り付けるための取付手段と、
被加工物の表面を感知するための表面感知デバイスと、
第1回転軸まわりに前記取付手段に対して回転可能であって第1モーターによって動かされる第1部材と、第2回転軸まわりに前記第1部材に対して回転可能であって第2モーターによって動かされる第2部材とを有する前記支持体であって、前記第2回転軸は、前記第1回転軸を横切り、前記表面感知デバイスが、前記第2部材に、それとともに回転するために取り付けられる、前記支持体と、
第3回転軸まわりの前記支持体に対する前記表面感知デバイスの回転を可能にするための回転手段であって、該第3回転軸は前記第1回転軸と合わさることが可能である、回転手段と
を備え、
該方法は、
前記第1回転軸および前記第3回転軸を合わせるステップと、そして、
前記表面感知デバイスに対する前記支持体の回転を生じさせるように、前記第1モーターを作動させるステップと
を含むことを特徴とする方法。 - 前記被加工物の前記表面に沿って前記デバイスを動かすステップと、そして、
前記被加工物の表面に関する情報を集めるステップと
をさらに含むことを特徴とする請求項32に記載の方法。 - 被加工物をスキャンすることを含むことを特徴とする請求項33に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0617344.7 | 2006-09-05 | ||
| GB0617344A GB0617344D0 (en) | 2006-09-05 | 2006-09-05 | Surface sensing device |
| GB0708572A GB0708572D0 (en) | 2007-05-03 | 2007-05-03 | Surface sensing device |
| GB0708572.3 | 2007-05-03 | ||
| PCT/GB2007/003295 WO2008029094A1 (en) | 2006-09-05 | 2007-08-31 | Surface sensing device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010502976A JP2010502976A (ja) | 2010-01-28 |
| JP2010502976A5 JP2010502976A5 (ja) | 2010-10-21 |
| JP5124579B2 true JP5124579B2 (ja) | 2013-01-23 |
Family
ID=39156862
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009527191A Active JP5124579B2 (ja) | 2006-09-05 | 2007-08-31 | 表面感知デバイス |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8006399B2 (ja) |
| EP (2) | EP2064514B2 (ja) |
| JP (1) | JP5124579B2 (ja) |
| CN (1) | CN102564306B (ja) |
| AT (1) | ATE459856T1 (ja) |
| DE (1) | DE602007005150D1 (ja) |
| WO (1) | WO2008029094A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0501690D0 (en) * | 2005-01-27 | 2005-03-02 | Renishaw Plc | Articulating device |
| SE533198C2 (sv) * | 2008-02-14 | 2010-07-20 | Hexagon Metrology Ab | Mätanordning med mäthuvud för kontrollmätning av föremål |
| GB0804114D0 (en) * | 2008-03-05 | 2008-04-09 | Renishaw Plc | Surface sensing device |
| EP2381212B1 (en) * | 2010-04-26 | 2018-04-25 | Tesa Sa | Coordinate measuring system for rotationally symmetric workpieces |
| EP2384851B1 (en) * | 2010-05-03 | 2018-01-03 | Tesa Sa | Coordinate Measuring System with rotatory adapter |
| DK2614333T3 (da) * | 2010-09-10 | 2021-11-01 | Carl Zeiss 3D Automation Gmbh | Følerstiftanordning |
| JP6104557B2 (ja) * | 2012-10-18 | 2017-03-29 | 株式会社ミツトヨ | 表面粗さ測定ユニット、三次元測定装置 |
| US8881611B2 (en) | 2013-02-26 | 2014-11-11 | The Boeing Company | Automated inspection system |
| DE102015203369B4 (de) | 2015-02-25 | 2020-02-20 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren zum Bestimmen der Messbedingungen eines Rauheitssensors, Verfahren zum Vermessen der Rauheit einer Werkstückoberfläche, Computerprogrammprodukt sowie Messgerät eingerichtet zur Durchführung der Verfahren |
| DE102015209193A1 (de) | 2015-05-20 | 2016-11-24 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren zur Erfassung dynamischer Schwingungen eines Rauheitssensors, Verfahren zur Vermessung der Rauheit einer Werkstückoberfläche, Computerprogrammprodukt sowie Messgerät eingerichtet zur Durchführung der Verfahren. |
| JP6649013B2 (ja) * | 2015-08-27 | 2020-02-19 | 株式会社ミツトヨ | プローブヘッド回転機構 |
| US10352340B2 (en) * | 2016-03-16 | 2019-07-16 | Hexagon Metrology, Inc. | Probe clips for a coordinate measuring machine |
| US10663274B2 (en) | 2017-01-27 | 2020-05-26 | Faro Technologies, Inc | Articulated arm coordinate measuring machine |
| GB201702391D0 (en) | 2017-02-14 | 2017-03-29 | Renishaw Plc | Surface sensing device |
| WO2018150178A1 (en) | 2017-02-15 | 2018-08-23 | Renishaw Plc | Surface finish or surface roughness probe |
| DE102017103938A1 (de) | 2017-02-24 | 2018-08-30 | Carl Zeiss Industrielle Messtechnik Gmbh | Vorrichtung zum Messen der Rauheit einer Werkstückoberfläche |
| DE102017105814B3 (de) | 2017-03-17 | 2018-05-30 | Carl Zeiss Industrielle Messtechnik Gmbh | System zum Messen der Rauheit einer Oberfläche eines Werkstücks |
| DE102017106425B4 (de) | 2017-03-24 | 2020-02-06 | Carl Zeiss Industrielle Messtechnik Gmbh | Von einem Koordinatenmessgerät verfahrbare Vorrichtung zum Positionieren eines Messinstruments bezüglich eines Werkstücks |
| JP6368986B1 (ja) * | 2017-03-27 | 2018-08-08 | 株式会社東京精密 | 検出器、表面性状測定機、及び真円度測定機 |
| DE102017003641B4 (de) | 2017-04-13 | 2019-10-17 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren zur Messung von Koordinaten oder Eigenschaften einer Werkstückoberfläche |
| DE102017108033A1 (de) | 2017-04-13 | 2018-10-18 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren zur Messung von Koordinaten oder Eigenschaften einer Werkstückoberfläche |
| GB201806830D0 (en) * | 2018-04-26 | 2018-06-13 | Renishaw Plc | Surface finish stylus |
| WO2020021417A1 (en) | 2018-07-26 | 2020-01-30 | Tesa Sarl | Accessory for rotary probe support |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2867043A (en) † | 1952-10-16 | 1959-01-06 | Applic Electroniques Des Caout | Variable electric resistance semiconductor devices |
| US3727119A (en) * | 1971-02-01 | 1973-04-10 | Information Dev Corp | Servo controlled automatic inspection apparatus |
| US3750295A (en) † | 1971-07-22 | 1973-08-07 | Werkzeugmasch Veb | Measuring machine |
| JPS5775503U (ja) * | 1980-10-27 | 1982-05-10 | ||
| EP0312119A3 (en) | 1987-10-16 | 1989-05-31 | Nissan Motor Co., Ltd. | Three-dimensional measuring robot |
| DE3740070A1 (de) | 1987-11-26 | 1989-06-08 | Zeiss Carl Fa | Dreh-schwenk-einrichtung fuer tastkoepfe von koordinatenmessgeraeten |
| GB8803847D0 (en) † | 1988-02-18 | 1988-03-16 | Renishaw Plc | Mounting for surface-sensing device |
| US5189806A (en) * | 1988-12-19 | 1993-03-02 | Renishaw Plc | Method of and apparatus for scanning the surface of a workpiece |
| GB8908854D0 (en) † | 1989-04-19 | 1989-06-07 | Renishaw Plc | Method of and apparatus for scanning the surface of a workpiece |
| DE69003149T2 (de) | 1989-04-14 | 1994-01-05 | Renishaw Plc | Tastkopf. |
| US5124524A (en) † | 1990-11-15 | 1992-06-23 | Laser Design Inc. | Laser alignment and control system |
| DE4039336C5 (de) * | 1990-12-10 | 2004-07-01 | Carl Zeiss | Verfahren zur schnellen Werkstück-Temperaturmessung auf Koordinatenmeßgeräten |
| DE4308823C2 (de) | 1993-03-19 | 2002-11-07 | Zeiss Carl | Messender Tastkopf für Koordinatenmeßgeräte |
| JPH0743102A (ja) * | 1993-07-27 | 1995-02-10 | Etsuzo Fukuda | 測定子の位置ぎめ用具 |
| GB9605278D0 (en) | 1996-03-13 | 1996-05-15 | Renishaw Plc | Opto-electronic scale reading apparatus |
| EP1189732B1 (de) † | 1999-06-26 | 2003-05-07 | KUKA Schweissanlagen GmbH | Verfahren und vorrichtung zum kalibrieren von robotermessstationen, manipulatoren und mitgeführten optischen messeinrichtungen |
| DE10006753A1 (de) * | 2000-02-15 | 2001-08-16 | Zeiss Carl | Dreh-Schwenkeinrichtung für den Tastkopf eines Koordinatenmeßgerätes |
| EP1342051B1 (de) * | 2000-09-28 | 2005-10-19 | Carl Zeiss Industrielle Messtechnik GmbH | Kalibrierung eines messenden sensors auf einem koordinatenmessgerät mit einer kugel, deren mittelpunkt bekannt ist |
| EP1322909B2 (de) * | 2000-09-28 | 2016-12-21 | Carl Zeiss Industrielle Messtechnik GmbH | Koordinatenmessgerät |
| DE10100352A1 (de) † | 2001-01-05 | 2002-07-11 | Zeiss Carl | Koordinatenmeßgerät mit einem Spritzschutz für den Tastkopf des Koordinatenmeßgerätes |
| JP2003014405A (ja) * | 2001-07-04 | 2003-01-15 | Okuma Corp | ワークの表面・裏面共用計測スタイラス |
| JP4576002B2 (ja) * | 2002-02-14 | 2010-11-04 | ファロ テクノロジーズ インコーポレーテッド | 内蔵ラインレーザスキャナを備えた携帯可能な座標測定装置 |
| FR2837567B1 (fr) † | 2002-03-19 | 2005-05-06 | Romain Granger | Capteur pour machine de mesure de coordonnees tridimensionnelles |
| GB0207912D0 (en) * | 2002-04-05 | 2002-05-15 | Renishaw Plc | Kinematic coupling |
| GB0215152D0 (en) * | 2002-07-01 | 2002-08-07 | Renishaw Plc | Probe or stylus orientation |
| DE10260670B4 (de) † | 2002-12-23 | 2007-04-05 | Carl Zeiss Industrielle Messtechnik Gmbh | Vorrichtung zum optischen Abtasten von Werkstücken |
| GB2417090A (en) † | 2003-04-28 | 2006-02-15 | Stephen James Crampton | CMM arm with exoskeleton |
| US7257992B2 (en) | 2004-07-06 | 2007-08-21 | Cim Systems, Inc. | Surface finish tester apparatus and methods |
| EP1617172B1 (fr) | 2004-07-16 | 2007-12-26 | Tesa SA | Palpeur orientable |
| JP4582446B2 (ja) † | 2004-11-18 | 2010-11-17 | 株式会社東京精密 | 測定装置 |
| JP4568621B2 (ja) | 2005-02-28 | 2010-10-27 | 株式会社ミツトヨ | 表面性状測定機の真直度補正方法および表面性状測定機 |
| GB0605796D0 (en) * | 2006-03-23 | 2006-05-03 | Renishaw Plc | Apparatus and method of measuring workpieces |
| EP1978328B1 (en) * | 2007-04-03 | 2015-02-18 | Hexagon Metrology AB | Oscillating scanning probe with constant contact force |
-
2007
- 2007-08-31 CN CN201110358458.0A patent/CN102564306B/zh active Active
- 2007-08-31 DE DE602007005150T patent/DE602007005150D1/de active Active
- 2007-08-31 EP EP07804102.7A patent/EP2064514B2/en active Active
- 2007-08-31 JP JP2009527191A patent/JP5124579B2/ja active Active
- 2007-08-31 AT AT07804102T patent/ATE459856T1/de not_active IP Right Cessation
- 2007-08-31 WO PCT/GB2007/003295 patent/WO2008029094A1/en active Application Filing
- 2007-08-31 US US12/310,206 patent/US8006399B2/en active Active
- 2007-08-31 EP EP10000459.7A patent/EP2207006B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| ATE459856T1 (de) | 2010-03-15 |
| EP2207006A2 (en) | 2010-07-14 |
| EP2207006B2 (en) | 2022-01-26 |
| US8006399B2 (en) | 2011-08-30 |
| DE602007005150D1 (de) | 2010-04-15 |
| WO2008029094A1 (en) | 2008-03-13 |
| EP2207006B1 (en) | 2013-10-02 |
| CN102564306A (zh) | 2012-07-11 |
| EP2064514B1 (en) | 2010-03-03 |
| JP2010502976A (ja) | 2010-01-28 |
| EP2207006A3 (en) | 2010-11-03 |
| EP2064514B2 (en) | 2014-08-06 |
| CN102564306B (zh) | 2014-09-24 |
| US20090255139A1 (en) | 2009-10-15 |
| EP2064514A1 (en) | 2009-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5124579B2 (ja) | 表面感知デバイス | |
| EP1875158B1 (en) | Surface sensing device with optical sensor | |
| US7676942B2 (en) | Multi-axis positioning and measuring system and method of using | |
| EP2259897B1 (en) | Surface sensing device | |
| JPH0789045B2 (ja) | 三次元変位量測定器 | |
| JP2023090783A (ja) | 表面感知デバイス(surface sensing device)を較正する方法、対応する制御コンピュータ用較正プログラムおよび対応する較正キット | |
| JP4570437B2 (ja) | 表面粗さ/輪郭形状測定装置 | |
| JP2021094600A (ja) | 工作機械及びワーク加工部の形状測定方法 | |
| JP4067763B2 (ja) | 複雑な三次元形状を有する部品の寸法および/または形状をチェックするための光電装置 | |
| CN101512285B (zh) | 表面感测设备 | |
| WO2019155698A1 (ja) | 表面形状測定機 | |
| JPS63289410A (ja) | 三次元測定機 | |
| JP2008155327A (ja) | 角度測定治具及び角度測定方法 | |
| RU2084326C1 (ru) | Обрабатывающее устройство | |
| JP2019138898A (ja) | 表面形状測定機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100831 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120831 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20121001 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20121010 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121029 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5124579 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |