JP5079346B2 - 波形補正装置および波形補正方法 - Google Patents
波形補正装置および波形補正方法 Download PDFInfo
- Publication number
- JP5079346B2 JP5079346B2 JP2007019682A JP2007019682A JP5079346B2 JP 5079346 B2 JP5079346 B2 JP 5079346B2 JP 2007019682 A JP2007019682 A JP 2007019682A JP 2007019682 A JP2007019682 A JP 2007019682A JP 5079346 B2 JP5079346 B2 JP 5079346B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- value
- calculation
- amplitude
- correction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012937 correction Methods 0.000 title claims description 114
- 238000000034 method Methods 0.000 title claims description 12
- 238000001514 detection method Methods 0.000 claims description 59
- 238000005070 sampling Methods 0.000 claims description 43
- 230000014509 gene expression Effects 0.000 claims description 16
- 230000003247 decreasing effect Effects 0.000 claims description 3
- 230000005540 biological transmission Effects 0.000 claims 1
- 230000007704 transition Effects 0.000 description 40
- 238000007493 shaping process Methods 0.000 description 24
- 230000008859 change Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 10
- 101150035397 Ros1 gene Proteins 0.000 description 8
- 101150096886 sft-1 gene Proteins 0.000 description 8
- 101150040096 SFT2 gene Proteins 0.000 description 7
- 238000010606 normalization Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 101100381996 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) BRO1 gene Proteins 0.000 description 2
- 238000011179 visual inspection Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/2448—Correction of gain, threshold, offset or phase control
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K5/00—Manipulating of pulses not covered by one of the other main groups of this subclass
- H03K5/01—Shaping pulses
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Nonlinear Science (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
杉本 英彦等"ACサーボシステムの理論と設計の実際"総合電子出版社 (P142〜P149)
或る時点のデジタル信号とそれ以前のサンプリングで得られたデジタル信号とを用いて該デジタル信号の最大値および最小値を検出する最大値・最小値検出部と、前記波形信号の中間値として予め設定された基準電位から前記デジタル信号の最大値と最小値との中間値までのオフセット値を算出する第1の演算部と、前記デジタル信号の最大値または最小値に対して該オフセット値を減算または加算することによって前記デジタル信号の実際の振幅を算出する第2の演算部と、前記或る時点のデジタル信号から前記オフセット値を減算または加算して第1の補正信号を生成する第3の演算部と、前記実際の振幅を予め設定された基準振幅に収束させるために、前記実際の振幅の桁をシフトした値を、前記実際の振幅に対して加算または減算する第4の演算部と、前記第4の演算部における加算または減算の実行と同時に、前記第1の補正信号を第2の補正信号へ収束させるために、前記第1の補正信号の桁を前記実際の振幅のシフト量と同量だけシフトした値を、前記第1の補正信号に対して加算または減算する第5の演算部と、を備えている。
Ai=Ai−1+Ay×2−i (式1)
Ai=Ai−1−Ay×2−i (式2)
(但し、i=1、2・・・nである。A0=Ayである。Ayは前記実際の振幅である。)
予め設定された基準振幅に前記Aiが収束するまで、あるいは、次のサンプリングが実行されるまで、式1または式2を繰り返し演算し、
前記第5の演算部は、
yi=yi−1+yc×2−i (式3)
yi=yi−1−yc×2−i (式4)
(但し、i=1、2・・・nである。y0=ycである。ycは前記第1の補正信号である。)
予め設定された基準振幅に前記Aiが収束するまで、あるいは、次のサンプリングが実行されるまで、式3または式4を繰り返し演算する。
或る時点のデジタル信号とそれ以前のサンプリングで得られたデジタル信号とを用いて前記デジタル信号の最大値および最小値を検出し、前記波形信号の中間値として予め設定された基準電位から前記デジタル信号の最大値と最小値との中間値までのオフセット値を算出し(第1の演算)、前記デジタル信号の最大値または最小値に対して該オフセット値を減算または加算することによって前記デジタル信号の実際の振幅を算出し(第2の演算)、前記或る時点のデジタル信号から前記オフセット値を減算または加算して第1の補正信号を生成し(第3の演算)、予め設定された基準振幅に前記実際の振幅を収束させるために、前記実際の振幅の桁をシフトした値を、前記実際の振幅に対して加算または減算し(第4の演算)、前記第4の演算における加算または減算の実行と同時に、前記第1の補正信号を第2の補正信号へ収束させるために、前記第1の補正信号の桁を前記実際の振幅のシフト量と同量だけシフトした値を、前記第1の補正信号に対して加算または減算する(第5の演算)、ことを具備する。
Ai=Ai−1+Ay×2−i (式1)
Ai=Ai−1−Ay×2−i (式2)
(但し、i=1、2・・・nである。Ayは前記実際の振幅である。A0=Ayである。)
予め設定された基準振幅に前記Aiが収束するまで、あるいは、次のサンプリングが実行されるまで、式1または式2を繰り返し実行し、
前記第5の演算では、
yi=yi−1+yc×2−i (式3)
yi=yi−1−yc×2−i (式4)
(但し、i=1、2・・・nである。ycは前記第1の補正信号である。y0=ycである。)
予め設定された基準振幅に前記yiが収束するまで、あるいは、次のサンプリングが実行されるまで、式3または式4を繰り返し実行する。
Ai=Ai−1+Ay×2−i (式1)
Ai=Ai−1−Ay×2−i (式2)
但し、i=1、2・・・nである。A0=Ayである。第4の演算部51は、基準振幅ARyに実際の振幅Ayが収束するまで、あるいは、次のサンプリングが実行されるまで、式1または式2を繰り返し演算する。
yi=yi−1−yc×2−i (式4)
但し、y0=ycである。第5の演算部52は、基準振幅ARyに実際の振幅Ayが収束するまで、あるいは、次のサンプリングが実行されるまで、式3または式4を繰り返し演算する。
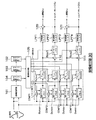
20…A/Dコンバータ
10…ロータリエンコーダまたはリニアスケール
30…振幅検出部
40、41…減算器(第3の演算部)
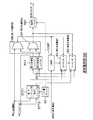
50…波形整形部
101…基準検出回路
102〜104…符号変化レジスタ
105…遷移検出回路
Dymax、Dymin、Dxmax、Dxmin…最大・最小検出回路
110、111…加算器(第1の演算部)
120、121…減算器(第2の演算部)
Ros1、Ros2…オフセットレジスタ
LPF1〜LPF4…低域通過フィルタ
51…第4の演算部
52…第5の演算部
56…第1の選択部
57…第2の選択部
R11…第1の計算値レジスタ
R21…第2の計算値レジスタ
R31…補正値レジスタ
COMP…比較部
SFT1…第1のシフティング部
SFT2…第2のシフティング部
SC…シフト量カウンタ
Claims (13)
- 回転運動または往復運動を行う運動体の角度または位置を示す波形信号を周期的にサンプリングし、この信号をデジタル化して得られたデジタル信号を補正する波形補正装置であって、
或る時点のデジタル信号とそれ以前のサンプリングで得られたデジタル信号とを用いて該デジタル信号の最大値および最小値を検出する最大値・最小値検出部と、
前記波形信号の中間値として予め設定された基準電位から前記デジタル信号の最大値と最小値との中間値までのオフセット値を算出する第1の演算部と、
前記デジタル信号の最大値または最小値に対して該オフセット値を減算または加算することによって前記デジタル信号の実際の振幅を算出する第2の演算部と、
前記或る時点のデジタル信号から前記オフセット値を減算または加算して第1の補正信号を生成する第3の演算部と、
前記実際の振幅を予め設定された基準振幅に収束させるために、前記実際の振幅の桁を下げる方向へシフトした値を、前記実際の振幅に対して加算または減算する第4の演算部と、
前記第4の演算部における加算または減算の実行と同時に、前記第1の補正信号を第2の補正信号へ収束させるために、前記第1の補正信号の桁を前記実際の振幅のシフト量と同量だけシフトした値を、前記第1の補正信号に対して前記第4の演算部の演算と同様に加算または減算する第5の演算部と、を備えた波形補正装置。 - 前記第4の演算部は、
Ai=Ai−1+Ay×2−i (式1)
Ai=Ai−1−Ay×2−i (式2)
(但し、i=1、2・・・nである。A0=Ayである。Ayは前記実際の振幅である。)
予め設定された基準振幅に前記Aiが収束するまで、あるいは、次のサンプリングが実行されるまで、式1または式2を繰り返し演算し、
前記第5の演算部は、
yi=yi−1+yc×2−i (式3)
yi=yi−1−yc×2−i (式4)
(但し、i=1、2・・・nである。y0=ycである。ycは前記第1の補正信号である。)
予め設定された基準振幅に前記Aiが収束するまで、あるいは、次のサンプリングが実行されるまで、式3または式4を繰り返し演算することを特徴とする請求項1に記載の波形補正装置。 - 前記実際の振幅が前記基準振幅よりも小さい場合、前記第4の演算部は式1を演算し、かつ前記第5の演算部は式3を演算し、前記実際の振幅が前記基準振幅よりも大きい場合、前記第4の演算部は式2を演算し、かつ前記第5の演算部は式4を演算することを特徴とする請求項2に記載の波形補正装置。
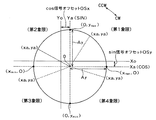
- 前記デジタル信号はsin信号およびcos信号で表され、
前記第1から前記第5の演算部は、前記sin信号および前記cos信号のそれぞれに対応して設けられ、前記sin信号および前記cos信号のそれぞれについて演算を実行することを特徴とする請求項1から請求項3のいずれかに記載の波形補正装置。 - 前記sin信号または前記cos信号のいずれか一方の符号が一定である期間の間にサンプリングされた複数の前記デジタル信号のうち、cos信号の最大値xmax、cos信号の最小値xmin、sin信号の最大値ymaxおよびsin信号の最小値yminを保持する最大値・最小値レジスタをさらに備えたことを特徴とする請求項4に記載の波形補正装置。
- 前記第1の演算部は、前記デジタル信号の最大値と最小値とを加算し、その値の桁を1桁だけシフトさせる加算器であることを特徴とする請求項1に記載の波形補正装置。
- 前記最大値・最小値レジスタと前記第2の演算部との間に設けられた第1の低域通過フィルタと、
前記第1の演算部と前記第2の演算部との間に設けられた第2の低域通過フィルタとをさらに備えたことを特徴とする請求項5に記載の波形補正装置。 - 前記第4の演算部の演算結果を保持する第1の計算値レジスタと、
前記第5の演算部の演算結果を保持する第2の計算値レジスタと、
前記サンプリング直後の最初の演算において前記実際の振幅を前記第4の演算部へ送信し、それ以降の演算においては、前記第1の計算値レジスタに保持されたデータを前記第4の演算部へ送信する第1の選択部と、
前記サンプリング直後の最初の演算において前記第1の補正信号を前記第5の演算部へ送信し、それ以降の演算においては、前記第2の計算値レジスタに保持されたデータを前記第5の演算部へ送信する第2の選択部と、
前記第1の選択部で選択された前記実際の振幅または前記第1の計算値レジスタに保持されたデータを前記基準振幅と比較し、その比較結果に応じて前記第4の演算部および前記第5の演算部の実行する演算として加算または減算のいずれかを決定する比較部と、
前記実際の振幅の桁をシフトする第1のシフティング部と、
前記第1の補正信号の桁をシフトする第2のシフティング部と、
前記第2の補正信号を保持する補正値レジスタとをさらに備えたことを特徴とする請求項1に記載の波形補正装置。 - 前記デジタル信号はsin信号およびcos信号で表され、
前記第1から前記第5の演算部、前記第1および前記第2の計算値レジスタ、前記第1および前記第2の選択部、前記第1および前記第2のシフティング部、および、前記補正値レジスタは、前記sin信号および前記cos信号のそれぞれに対応して設けられていることを特徴とする請求項8に記載の波形補正装置。 - 回転運動または往復運動を行う運動体の位置を示す波形信号を周期的にサンプリングし、この信号をデジタル化して得られたデジタル信号を補正する波形補正方法であって、
或る時点のデジタル信号とそれ以前のサンプリングで得られたデジタル信号とを用いて前記デジタル信号の最大値および最小値を検出し、
前記波形信号の中間値として予め設定された基準電位から前記デジタル信号の最大値と最小値との中間値までのオフセット値を算出し(第1の演算)、
前記デジタル信号の最大値または最小値に対して該オフセット値を減算または加算することによって前記デジタル信号の実際の振幅を算出し(第2の演算)、
前記或る時点のデジタル信号から前記オフセット値を減算または加算して第1の補正信号を生成し(第3の演算)、
予め設定された基準振幅に前記実際の振幅を収束させるために、前記実際の振幅の桁を下げる方向へシフトした値を、前記実際の振幅に対して加算または減算し(第4の演算)、
前記第4の演算における加算または減算の実行と同時に、前記第1の補正信号を第2の補正信号へ収束させるために、前記第1の補正信号の桁を前記実際の振幅のシフト量と同量だけシフトした値を、前記第1の補正信号に対して前記第4の演算と同様に加算または減算する(第5の演算)、ことを具備した波形補正方法。 - 前記第4の演算では、
Ai=Ai−1+Ay×2−i (式1)
Ai=Ai−1−Ay×2−i (式2)
(但し、i=1、2・・・nである。Ayは前記実際の振幅である。A0=Ayである。)
予め設定された基準振幅に前記Aiが収束するまで、あるいは、次のサンプリングが実行されるまで、式1または式2を繰り返し実行し、
前記第5の演算では、
yi=yi−1+yc×2−i (式3)
yi=yi−1−yc×2−i (式4)
(但し、i=1、2・・・nである。ycは前記第1の補正信号である。y0=ycである。)
予め設定された基準振幅に前記yiが収束するまで、あるいは、次のサンプリングが実行されるまで、式3または式4を繰り返し実行することを特徴とする請求項10に記載の波形補正方法。 - 前記実際の振幅が前記基準振幅よりも小さい場合、前記第4の演算では式1を実行し、かつ前記第5の演算では式3を実行し、前記実際の振幅が前記基準振幅よりも大きい場合、前記第4の演算では式2を実行し、かつ前記第5の演算では式4を実行することを特徴とする請求項11に記載の波形補正方法。
- 前記デジタル信号はsin信号およびcos信号で表され、
前記第1から前記第5の演算は、前記sin信号および前記cos信号のそれぞれについて実行されることを特徴とする請求項10から請求項12のいずれかに記載の波形補正方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007019682A JP5079346B2 (ja) | 2007-01-30 | 2007-01-30 | 波形補正装置および波形補正方法 |
| DE102008006526A DE102008006526B4 (de) | 2007-01-30 | 2008-01-29 | Wellenform-Korrekturvorrichtung und Wellenform-Korrekturverfahren |
| US12/021,493 US8219603B2 (en) | 2007-01-30 | 2008-01-29 | Waveform correction apparatus and waveform correction method |
| TW097103314A TW200842315A (en) | 2007-01-30 | 2008-01-29 | Waveform correction apparatus and waveform correction method |
| KR1020080009026A KR100978423B1 (ko) | 2007-01-30 | 2008-01-29 | 파형 보정 장치 및 파형 보정 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007019682A JP5079346B2 (ja) | 2007-01-30 | 2007-01-30 | 波形補正装置および波形補正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008185474A JP2008185474A (ja) | 2008-08-14 |
| JP5079346B2 true JP5079346B2 (ja) | 2012-11-21 |
Family
ID=39564174
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007019682A Active JP5079346B2 (ja) | 2007-01-30 | 2007-01-30 | 波形補正装置および波形補正方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8219603B2 (ja) |
| JP (1) | JP5079346B2 (ja) |
| KR (1) | KR100978423B1 (ja) |
| DE (1) | DE102008006526B4 (ja) |
| TW (1) | TW200842315A (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5190644B2 (ja) * | 2008-09-24 | 2013-04-24 | 日本電産サンキョー株式会社 | エンコーダの誤差補正方法 |
| DE102009022084B4 (de) * | 2009-05-20 | 2015-07-09 | Sew-Eurodrive Gmbh & Co Kg | Verfahren zur Bestimmung der Winkelstellung eines drehbaren Teils |
| JP5602420B2 (ja) | 2009-12-10 | 2014-10-08 | キヤノン株式会社 | 変位測定装置、露光装置、及び精密加工機器 |
| JP6222425B2 (ja) * | 2013-04-24 | 2017-11-01 | セイコーエプソン株式会社 | 物理量検出回路、物理量検出装置、電子機器及び移動体 |
| JP6940955B2 (ja) * | 2017-02-14 | 2021-09-29 | 日本電産サンキョー株式会社 | ロータリエンコーダ |
| JP2022111803A (ja) * | 2021-01-20 | 2022-08-01 | キヤノン株式会社 | 被検物の位置又は角度を算出する算出方法、プログラム、情報処理装置及びシステム |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4458322A (en) * | 1981-06-19 | 1984-07-03 | Manhattan Engineering Co., Inc. | Control of page storage among three media using a single channel processor program and a page transfer bus |
| JPH06167354A (ja) | 1992-11-27 | 1994-06-14 | Sony Magnescale Inc | スケールの内挿処理装置 |
| JPH07218288A (ja) * | 1994-01-28 | 1995-08-18 | Mitsubishi Electric Corp | 絶対位置検出装置及びその誤差補正方法 |
| JP2002243501A (ja) | 2001-02-16 | 2002-08-28 | Canon Inc | エンコーダ出力信号の自動調整装置 |
| TW579424B (en) | 2001-07-09 | 2004-03-11 | Shell Int Research | Vibration analysis for predictive maintenance in machinery |
| JP2004045286A (ja) * | 2002-07-12 | 2004-02-12 | Denso Corp | レゾルバ補正方法 |
| EP1471332A1 (en) * | 2003-04-17 | 2004-10-27 | Dialog Semiconductor GmbH | Digital interface for an angular sensor |
| DE10334869B3 (de) * | 2003-07-29 | 2004-09-16 | Tech3 E.K. | Drehwinkelsensor |
| CN1882822A (zh) * | 2003-11-18 | 2006-12-20 | 皇家飞利浦电子股份有限公司 | 位置确定 |
| JP2005208028A (ja) * | 2003-12-22 | 2005-08-04 | Minebea Co Ltd | バリアブルリラクタンスレゾルバ用角度演算方法とそのための角度演算装置 |
| JP4429888B2 (ja) | 2004-12-16 | 2010-03-10 | アルプス電気株式会社 | 補償機能を備えた角度検出センサ |
| JP4524652B2 (ja) | 2005-07-06 | 2010-08-18 | ソニー株式会社 | Ad変換装置並びに半導体装置 |
| JP4453758B2 (ja) * | 2006-06-19 | 2010-04-21 | パナソニック株式会社 | エンコーダ信号の位相補正回路 |
| JP4987448B2 (ja) * | 2006-12-05 | 2012-07-25 | 東芝機械株式会社 | 速度検出装置 |
| JP2010164541A (ja) * | 2009-01-19 | 2010-07-29 | Canon Inc | 処理装置 |
-
2007
- 2007-01-30 JP JP2007019682A patent/JP5079346B2/ja active Active
-
2008
- 2008-01-29 KR KR1020080009026A patent/KR100978423B1/ko not_active IP Right Cessation
- 2008-01-29 US US12/021,493 patent/US8219603B2/en not_active Expired - Fee Related
- 2008-01-29 TW TW097103314A patent/TW200842315A/zh not_active IP Right Cessation
- 2008-01-29 DE DE102008006526A patent/DE102008006526B4/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR100978423B1 (ko) | 2010-08-26 |
| KR20080071507A (ko) | 2008-08-04 |
| DE102008006526B4 (de) | 2011-06-30 |
| TWI359940B (ja) | 2012-03-11 |
| JP2008185474A (ja) | 2008-08-14 |
| US8219603B2 (en) | 2012-07-10 |
| DE102008006526A1 (de) | 2008-07-31 |
| TW200842315A (en) | 2008-11-01 |
| US20080215661A1 (en) | 2008-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5079346B2 (ja) | 波形補正装置および波形補正方法 | |
| JP4768248B2 (ja) | エンコーダ出力信号補正装置及び方法 | |
| JP4713123B2 (ja) | エンコーダ出力信号補正装置 | |
| KR0169550B1 (ko) | 절대위치 검출장치 및 그 에러 보정방법 | |
| TWI438408B (zh) | 偵測裝置 | |
| CN109959400B (zh) | 绝对编码器参数计算的方法、装置及终端设备 | |
| EP3529880B1 (en) | Correcting offset and gain drift related angle errors with motor position detectors | |
| CN108375391B (zh) | 正余弦信号处理方法及系统 | |
| JP2010216961A (ja) | エンコーダ出力信号補正装置及び方法 | |
| US11788867B2 (en) | Incremental encoder position interpolation | |
| JP5249158B2 (ja) | エンコーダーのオフセット値補正方法 | |
| JP2017151061A (ja) | 内挿方法及び内挿装置 | |
| JP2014025871A (ja) | エンコーダ出力信号補正装置 | |
| JP4757328B2 (ja) | 逆正接演算装置及び逆正接演算プログラム | |
| KR100959215B1 (ko) | 속도 검출 장치 | |
| JP2005257565A (ja) | レゾルバディジタル角度変換装置および方法ならびにプログラム | |
| JP5190644B2 (ja) | エンコーダの誤差補正方法 | |
| JP2003222534A (ja) | 位相差誤差検出装置及びそれを用いた内挿誤差見積装置 | |
| JP4987269B2 (ja) | 速度検出装置およびサーボモータ | |
| US8401817B2 (en) | Velocity detection device and servomotor | |
| JP4713117B2 (ja) | エンコーダの出力信号補正装置及び方法 | |
| JP2008185486A (ja) | 振幅検出装置 | |
| JP2020016452A (ja) | 回転角センサの信号処理回路および回転角センサの信号処理方法 | |
| JP2021012052A (ja) | 座標データ回転演算装置及び座標データ回転演算方法 | |
| JP3967963B2 (ja) | アブソリュート変位検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120803 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120829 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150907 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5079346 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |