JP4429888B2 - 補償機能を備えた角度検出センサ - Google Patents
補償機能を備えた角度検出センサ Download PDFInfo
- Publication number
- JP4429888B2 JP4429888B2 JP2004364504A JP2004364504A JP4429888B2 JP 4429888 B2 JP4429888 B2 JP 4429888B2 JP 2004364504 A JP2004364504 A JP 2004364504A JP 2004364504 A JP2004364504 A JP 2004364504A JP 4429888 B2 JP4429888 B2 JP 4429888B2
- Authority
- JP
- Japan
- Prior art keywords
- compensation
- signal
- angle
- output
- distortion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Description
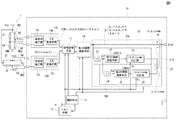
前記信号処理部には、前記出力信号から所定の位相差を有する2種類の信号を生成する信号変換手段と、前記2種類の信号から前記被測定物の補償前における出力角度を算出する第1の関数演算手段と、前記補償前の出力角度に含まれている誤差信号を除去する補償値を算出する補償手段と、前記補償手段が前記補償値を算出するときに用いる補償係数を予め取得して記憶しておくメモリ手段と、前記メモリ手段の記憶されている補償係数を読み出して前記補償手段に与える制御部と、が設けられ、
前記誤差信号が、前記センサ部が有する特性に基づいて発生する歪み誤差であり、前記補償手段には前記歪み誤差を減少させる歪み補償値を生成する歪み補償部が設けられていることを特徴とするものである。
前記信号処理部には、前記出力信号から所定の位相差を有する2種類の信号を生成する信号変換手段と、前記2種類の信号から前記被測定物の補償前における出力角度を算出する第1の関数演算手段と、前記補償前の出力角度に含まれている誤差信号を除去する補償値を算出する補償手段と、前記補償手段が前記補償値を算出するときに用いる補償係数を予め取得して記憶しておくメモリ手段と、前記メモリ手段の記憶されている補償係数を読み出して前記補償手段に与える制御部と、が設けられ、
前記誤差信号が、前記2種類の信号間に存在する前記所定の位相差を超えたことによって発生する位相誤差および前記センサ部が有する特性に基づいて発生する歪み誤差であり、前記補償手段には前記位相誤差を減少させる位相補償値を生成する位相補償部および前記歪み誤差を減少させる歪み補償値を生成する歪み補償部が設けられているものである。
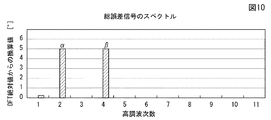
この場合、前記位相補償係数に与えられる正負の符号が、前記離散フーリエ変換を行って得られた高調波を複素数で表したときの実数の符号により決定することができる。
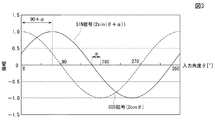
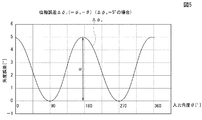
図3はブリッジ回路の出力であるSIN信号とCOS信号との間に位相誤差を含む場合を示す波形図である。

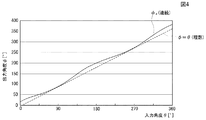
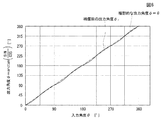
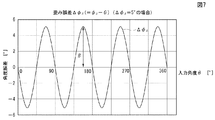
図6は抵抗値歪みに基づく歪み誤差が含まれている場合における補償前の出力角度φβを示す波形図、図7は検出歪み誤差Δφβ(=φβ−θ)を示す波形図である。なお、図7では検出歪み誤差Δφβの例として、歪み誤差βがβ=5度の場合を示している。
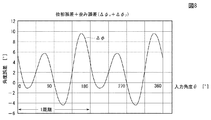
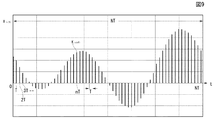
実際の角度検出センサの出力角度(補償前の出力角度)φには、上記の検出位相誤差Δφαと検出歪み誤差Δφβの2つの誤差信号が合成された状態で同時に重畳している。前記検出位相誤差Δφαと検出歪み誤差Δφβの両者を含むトータルの誤差信号を総誤差信号Δφとすると、総誤差信号Δφ(=Δφα+Δφβ)は図8に示すような1周期を180°とする周期関数からなる信号となり、このような総誤差信号Δφが理想的な出力角度として示される一次直線(φ=θ)上に重畳している。
前記総誤差信号Δφの1周期分に相当する180[°]を、例えば2n(nは自然数)個のデータ数で、サンプリング周期T=180/2n[°/個]で離散的にサンプリングすることにより、離散周期信号xS(t)を得る(図9参照)。
10 信号処理部
11 制御手段
12A 第1信号変換手段
12B 第2信号変換手段
13 信号調整手段
14 第1の関数演算手段
15 メモリ手段
20 補償手段
20A 位相補償部
20B 歪み補償部
21 第1の倍角手段
22 第2の関数演算手段
23 位相補償値生成手段
24 第2の倍角手段
25 第3の関数演算手段
26 歪み補償値生成手段
27 加算手段
28 減算手段
100 角度検出センサ
101 パッケージ
102 ホイール
e 固定層の磁化方向(磁化の向き)
G1〜G8 GMR素子
H 外部磁界
K1,K2,K3,K4 チップ基板
M1,M2 磁石
WB1 第1のブリッジ回路
WB2 第2のブリッジ回路
α 位相誤差
β 歪み誤差
α0 位相補償係数
β0 歪み補償係数
θ 入力角度
φα 補償前の出力角度(位相誤差が生じている場合)
φβ 補償前の出力角度(歪み誤差が生じている場合)
φ 補償前の出力角度(=φα又は=φβ又は=φα+φβ)
φOUT 角度検出センサの出力角度
Δφα 検出位相誤差(=φα−θ)
Δφβ 検出歪み誤差(=φβ−θ)
Δφ 総誤差信号(=Δφα+Δφβ)
(Δφα)comp 位相補償値
(Δφβ)comp 歪み補償値
Claims (7)
- 被測定物に与えられた回転に応じて回転磁界を発生するとともに前記回転磁界を感知して前記回転の入力角度に応じた複数の出力信号を出力するセンサ部と、前記出力信号から前記被測定物が回転した角度を出力角度として算出する信号処理部と、を備えた角度検出センサにおいて、
前記信号処理部には、前記出力信号から所定の位相差を有する2種類の信号を生成する信号変換手段と、前記2種類の信号から前記被測定物の補償前における出力角度を算出する第1の関数演算手段と、前記補償前の出力角度に含まれている誤差信号を除去する補償値を算出する補償手段と、前記補償手段が前記補償値を算出するときに用いる補償係数を予め取得して記憶しておくメモリ手段と、前記メモリ手段の記憶されている補償係数を読み出して前記補償手段に与える制御部と、が設けられ、
前記誤差信号が、前記センサ部が有する特性に基づいて発生する歪み誤差であり、前記補償手段には前記歪み誤差を減少させる歪み補償値を生成する歪み補償部が設けられていることを特徴とする補償機能を備えた角度検出センサ。 - 被測定物に与えられた回転に応じて回転磁界を発生するとともに前記回転磁界を感知して前記回転の入力角度に応じた複数の出力信号を出力するセンサ部と、前記出力信号から前記被測定物が回転した角度を出力角度として算出する信号処理部と、を備えた角度検出センサにおいて、
前記信号処理部には、前記出力信号から所定の位相差を有する2種類の信号を生成する信号変換手段と、前記2種類の信号から前記被測定物の補償前における出力角度を算出する第1の関数演算手段と、前記補償前の出力角度に含まれている誤差信号を除去する補償値を算出する補償手段と、前記補償手段が前記補償値を算出するときに用いる補償係数を予め取得して記憶しておくメモリ手段と、前記メモリ手段の記憶されている補償係数を読み出して前記補償手段に与える制御部と、が設けられ、
前記誤差信号が、前記2種類の信号間に存在する前記所定の位相差を超えたことによって発生する位相誤差および前記センサ部が有する特性に基づいて発生する歪み誤差であり、前記補償手段には前記位相誤差を減少させる位相補償値を生成する位相補償部および前記歪み誤差を減少させる歪み補償値を生成する歪み補償部が設けられていることを特徴とする補償機能を備えた角度検出センサ。 - 前記メモリ手段には、前記補償前の出力角度に含まれる誤差信号をサンプリングして取得したデータに対し離散フーリエ変換を行って得られる値が補償係数として記憶されている請求項1または2記載の補償機能を備えた角度検出センサ。
- 前記補償係数が、位相補償係数と歪み補償係数の少なくとも一方である請求項3記載の補償機能を備えた角度検出センサ。
- 前記位相補償係数に与えられる正負の符号が、前記離散フーリエ変換を行って得られた高調波を複素数で表したときの実数の符号により決定される請求項4記載の補償機能を備えた角度検出センサ。
- 前記位相補償係数が2次高調波成分から得られる請求項4または5記載の補償機能を備えた角度検出センサ。
- 前記歪み補償係数が4次高調波成分から得られる請求項4記載の補償機能を備えた角度検出センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004364504A JP4429888B2 (ja) | 2004-12-16 | 2004-12-16 | 補償機能を備えた角度検出センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004364504A JP4429888B2 (ja) | 2004-12-16 | 2004-12-16 | 補償機能を備えた角度検出センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006170837A JP2006170837A (ja) | 2006-06-29 |
| JP4429888B2 true JP4429888B2 (ja) | 2010-03-10 |
Family
ID=36671755
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004364504A Active JP4429888B2 (ja) | 2004-12-16 | 2004-12-16 | 補償機能を備えた角度検出センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4429888B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4991322B2 (ja) | 2006-10-30 | 2012-08-01 | 日立オートモティブシステムズ株式会社 | Gmr素子を用いた変位センサ,gmr素子を用いた角度検出センサ及びそれらに用いる半導体装置 |
| JP5079346B2 (ja) | 2007-01-30 | 2012-11-21 | 東芝機械株式会社 | 波形補正装置および波形補正方法 |
| JP5178374B2 (ja) * | 2008-07-29 | 2013-04-10 | キヤノン株式会社 | 検出装置 |
| CN102016513B (zh) | 2009-03-30 | 2013-04-10 | 日立金属株式会社 | 旋转角度检测装置 |
| JP5126325B2 (ja) | 2009-10-09 | 2013-01-23 | 株式会社デンソー | 回転角検出装置、および、これを用いた電動パワーステアリング装置 |
| JP5380425B2 (ja) * | 2010-12-28 | 2014-01-08 | 日立オートモティブシステムズ株式会社 | 磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置 |
| US8975891B2 (en) * | 2011-11-04 | 2015-03-10 | Honeywell International Inc. | Apparatus and method for determining in-plane magnetic field components of a magnetic field using a single magnetoresistive sensor |
| WO2017090153A1 (ja) | 2015-11-26 | 2017-06-01 | 三菱電機株式会社 | 角度検出装置および電動パワーステアリング装置 |
| WO2017090146A1 (ja) * | 2015-11-26 | 2017-06-01 | 三菱電機株式会社 | 角度検出装置及び電動パワーステアリング装置 |
| DE102016101965A1 (de) * | 2016-02-04 | 2017-08-10 | Fraba B.V. | Verfahren zum Kalibrieren eines Drehgebers und Drehgeber zur Bestimmung einer korrigierten Winkelposition |
| US10312837B2 (en) | 2016-05-02 | 2019-06-04 | Canon Kabushiki Kaisha | Information processing apparatus, and recording medium storing computer program |
-
2004
- 2004-12-16 JP JP2004364504A patent/JP4429888B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006170837A (ja) | 2006-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4689435B2 (ja) | 角度検出センサ | |
| CN100414255C (zh) | 角度检测传感器的补偿值计算方法以及使用其的角度检测传感器 | |
| US11022468B2 (en) | Magnetoresistive angle sensor and corresponding strong magnetic field error correction and calibration methods | |
| US10585147B2 (en) | Magnetic field sensor having error correction | |
| JP5096442B2 (ja) | 回転角計測装置,モータシステム及び電動パワーステアリング・システム | |
| JP5613839B2 (ja) | 移動する物体の絶対的な位置特定のための方法及び装置 | |
| JP6649390B2 (ja) | 隣接する回転輪の磁気干渉を解消可能な直読式メータ | |
| JP4194484B2 (ja) | 角度検出センサ | |
| US20100321008A1 (en) | Rotation-angle-detecting apparatus, rotating machine and rotation-angle-detecting method | |
| JP4429888B2 (ja) | 補償機能を備えた角度検出センサ | |
| JP6074988B2 (ja) | 回転磁気検出回路および回転磁気センサ | |
| JP4194485B2 (ja) | 角度検出センサ | |
| JP2006220529A (ja) | 絶対回転角度およびトルク検出装置 | |
| JP2015045529A (ja) | 回転磁界センサ | |
| JP2009150795A (ja) | 非接触式回転角度検出センサ装置およびその出力補正方法 | |
| JP2018054584A (ja) | 角度センサおよび角度センサシステム | |
| JP5176208B2 (ja) | 回転角度検出方法および回転角度センサ | |
| US20220163605A1 (en) | Electronic circuit for measuring an angle and an intensity of an external magnetic field | |
| US12072211B2 (en) | Apparatuses and methods for position detection | |
| JP2017156201A (ja) | 異常診断装置、異常診断方法、角度検出装置、およびプログラム | |
| US6340908B1 (en) | Phase adjusting circuit, scaling signal generation circuit using phase adjusting circuit, and position measuring apparatus using scaling signal generation circuit | |
| US12044529B2 (en) | Magnetic sensor including a magnetoresistance element and sensor system | |
| JP6276074B2 (ja) | 位置検出装置 | |
| WO2019216235A1 (ja) | 角度検出器 | |
| JP2020016439A (ja) | 角度センサの補正装置および角度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090915 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091216 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4429888 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131225 Year of fee payment: 4 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |