JP5027696B2 - 交通情報通信システム及び車載通信装置 - Google Patents
交通情報通信システム及び車載通信装置 Download PDFInfo
- Publication number
- JP5027696B2 JP5027696B2 JP2008059226A JP2008059226A JP5027696B2 JP 5027696 B2 JP5027696 B2 JP 5027696B2 JP 2008059226 A JP2008059226 A JP 2008059226A JP 2008059226 A JP2008059226 A JP 2008059226A JP 5027696 B2 JP5027696 B2 JP 5027696B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- information
- communication device
- unit
- received
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images































Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Mobile Radio Communication Systems (AREA)
- Navigation (AREA)
Description
特許文献1では、「車両間の通信手段を用いて自車両周辺の情報を取得し、その情報をドライバに通知する車載情報提供装置」に関する技術について開示されている。
また、特許文献2では、「車載通信装置が、GPS( Global Positioning System )受信機を用いて特定した自車両の位置と、歩行者が携帯する無線通信装置から受信した歩行者GPS情報から、危険度を判定し、危険の可能性がある場合にドライバにそのことを喚起し、また携帯無線通信装置にも、同様にGPS受信機を用いて特定した自身の位置と、車載通信装置から受信した車両のGPS情報から危険度を判定し、危険の可能性がある場合に歩行者にそのことを喚起する」技術について開示されている。
また上記特許文献2は、車両に搭載された車載通信装置と歩行者が携帯する歩行者携帯無線通信装置との間で直接無線通信を行う無線通信システムである。歩行者携帯無線通信装置は、自装置搭載の歩行者GPS情報と車両から受信した車両GPS情報から車両と歩行者の相対距離を算出し、危険と判定した場合に歩行者にそのことを喚起するものである。しかし、車両と歩行者の相対距離により危険度を判定する場合には、車両の周辺に多数の歩行者が存在すると、車両の後方や車両から離れる向きに移動中の歩行者など、本来通知する必要のない歩行者への不要な通知が行われてしまう。この通信は、また、携帯電話無線通信装置の電力消費を無駄に行うという問題にもなる。
本発明は、上記問題点に鑑みてなされたものであり、路車間通信、車両間通信、及び、人車間通信を用いて、道路交通情報、車両の走行情報、歩行者の位置情報を無線で通信する無線通信システムにおいて、自車両の周辺に多数の車両が存在する場合であっても、自車に危険な車両からの車両走行情報を適切なタイミングでドライバに通知することが可能な車載通信端末の提供を目的とする。また車両と歩行者間の無線通信で使用される携帯無線通信装置は受信する車両走行情報の中から必要な場合に限り車両の接近情報等の危険情報を歩行者に通知することにより、携帯無線装置の処理負荷を低減することが可能な車車間及び人車間通信システムの提供を目的とする。
本発明の交通情報通信システムの第一の実施例を図面によって説明する。図1は、本発明の交通情報通信システムにおける車載通信装置の一実施例の構成を示すブロック図である。
400は自車両、401は車両Aである。
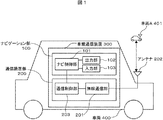
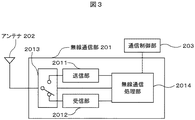
自車両400において、100はドライバに対し目的地までの誘導を行うナビゲーション機能等を搭載したナビゲーション部、101はナビゲーション部100内の各部の制御処理を行うナビ制御部、102はスピーカやモニタなど音声出力や画像情報の表示出力を行う出力部、103はドライバがナビゲーション部100に目的地等の設定などの入力を行う入力部である。また、200は車両A401との間で車両の走行状況を示す車両走行情報を無線で通信する通信装置部、201は自車両の車両走行情報の送信及び周辺を走行する車両A401から送信された車両走行情報の受信を行う無線通信部、202は無線通信部201の無線データ送受信に使用するアンテナ、203は無線装置部200とナビゲーション部100との間でデータの送受信を行う通信制御部である。また、300はナビゲーション部100と通信装置部200で構成される車載通信装置である。
自車両400は、車載通信装置300を搭載する。車両A401は、自車両400の周辺を走行し車載通信装置300を搭載し車両走行情報の送受信を行う。また、通信装置部200が通信する車両走行情報は、例えば、自車ID、走行位置、速度、走行向き、ブレーキ、アクセルの状態等の情報である。詳細は図5で説明する。
走行中は、自車両の走行位置を出力部102に表示した地図上に表示し、またドライバに目的地までのルート案内を行うため音声による走行案内情報を出力部102に出力する。また通信制御部203経由で受信した周辺車両A401に搭載する車載通信装置300からの車両走行情報を解析して出力部102に表示する。
入力部103は、ドライバがナビゲーション部100に対し、自車両400の行き先である目的地設定を行うのに必要な各種情報や、所定の処理動作要求を入力するための操作部で、入力操作盤(キーボード、タッチパネル入力等)等で構成される。ドライバが入力部103を通じて入力した各種情報はナビ制御部101に出力される。勿論、これらの入力操作盤として使用されるデバイス、装置や、音声情報を出力するデバイス、装置に限定されるものではなく、ドライバ、運転者、操作者の意思、動作、生体情報の変化に従って、操作、入力されるその他のデバイス、装置であってもよい。例えば、視線、眼球の動きを検出するもの、顔、頭の向き、傾き、角度、回転、動きなどを検出するもの、脈拍、血圧などをも含む生体情報を検出して、入力を可能とするデバイス、装置などであっても良い。
GPS1012は、複数個のGPS衛星との間で交信を行うことにより、自車両400の現在の位置情報を取得すると共に、取得した自車両400の現在の位置情報を制御部1017へ出力する。
ジャイロ1013は、自車両400の進行方向を検出すると共に、検出した自車両400の進行方向情報を、制御部1017に出力する。
地図情報記録部1014は、制御部1017の制御下で、自車両400の現在位置や、自車両400の目的地等を出力部102に表示するための地図情報を記録している。地図情報記録部1014は、制御部1017からの要求に応じて、指定された地図情報を出力する。
車両情報取得部1015は制御部1017の要求により、走行速度、エンジンの回転数、トルク、ブレーキ、アクセル状態など自車両400の動作状態を取得し出力する。
ドライバが入力部103から目的地を入力し、目的地までの走行を誘導するナビゲーション走行の要求設定を行った場合は、現在位置から目的地までの走行経路を算出し、指定されたルートに従って目的地まで音声、画像出力による誘導処理を行う。また、無線通信部200が他の車両から受信した車両走行情報を解析し、周辺を走行する車両の情報を出力部102に出力する。
制御部1017が取扱う具体的な車両走行情報の例については図5(後述)で説明する。
本無線通信のアクセス制御方式は、CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance)方式と呼ばれ、無線LAN( Local Area Network )のMAC( Media Access Control )層におけるアクセス制御方式としてIEEE802.11で標準化されている。
送信処理が完了すると、スイッチ2013は受信部2012側に切り替える。また、受信部2012においてデータ受信した場合は、無線通信処理部2014を介して通信制御部203に送信する。
データ項目としては、自車両を特定する番号である自車ID、自車両の車種を示す車両種別、自車両が走行している場所を示す緯度、経度、高度、自車両の走行速度を示す車速、自車両の走行加速度を示す加速度、自車両の走行方位を示す方向、ブレーキの使用状態を示すブレーキ、アクセルの使用状態を示すアクセル、周辺車両より受信した車両走行情報から検出した注意警戒が必要な車両IDを示す注意対象車両IDがある。それぞれのデータ項目について、データ量、単位、その他内容を図5(a) に示す。なお、図5(b) において、注意対象車両IDのデータ量は2Byteとしているが、複数台の車両に対応するため、2Byte以上としても良い。
なお、図5(a) において、ブレーキ、アクセルの内容が、「ON:OFF」となっているが、当該二値の情報に限定されるものではなく、ブレーキ、アクセルの使用状態に応じて、段階的にデータ量を示す情報とするものであっても良い。
ナビ制御部101は、これらの車両走行情報を取得すると、図5に示した車両走行情報データフォーマットに変換した後、通信装置部200に送信要求する。
402は車両A401と同様に車載通信装置300を搭載し自車両400の周辺を走行する二輪車、403は車両A401と同様に車載通信装置300を搭載し自車両400の周辺を走行する車両B、404は車両A401と同様に車載通信装置300を搭載し自車両400の周辺を走行する車両C、405は車両A401と同様に車載通信装置300を搭載し自車両400の周辺を走行する車両D、406は車両A401と同様に車載通信装置300を搭載し自車両400の周辺を走行する車両E、407は車両A401と同様に車載通信装置300を搭載し自車両400の周辺を走行する車両Fである。
800は自車両400に搭載されている車載無線装置300の無線通信部201と、周辺を走行する二輪車402、車両B403、車両C404、車両D405、車両E406及び車両F407がそれぞれ搭載する車載無線装置300の無線通信部201と通信可能状態である通信エリアA、810は自車両400が走行中のs地点、910は自車両400がこの後走行する予定のt地点である。
ナビ制御部101が車両走行情報の処理を開始すると、ステップS701では、車両走行情報受信通知があるか否かを判定する。否の時にはステップS708に処理を移行し、受信通知がある時にはステップS702に処理を移行する。
ステップS702では、受信した車両走行情報の注意対象車両IDが自車IDと一致するか否かを判定する。否の時にはステップS707に処理を移行し、一致する時にはステップS703に処理を移行する。即ち、ステップS702では、自身が注意対象車両として周辺車両に検出されていないかを確認するものである。
ステップS703では、自車両走行情報更新周期高速設定中か否かを判定する。否の時にはステップS704に処理を移行し、設定中の時にはステップS706に処理を移行する。
ステップS704では、自車両走行情報更新周期タイマを高速設定しステップS705に処理を移行する。ステップS705では、通信制御部203へ送信周期タイマの高速設定要求を行い、ステップS706に処理を移行する。ここで、自車両走行情報更新タイマは自車両400の車両走行情報を更新する周期タイマであり、ナビ制御部101はタイマ終了毎に自車両の車両走行情報を取得し、タイマを再起動する。一方、通信制御部203は送信周期タイマの終了毎に、ナビ制御部101から設定された車両走行情報の送信処理を実施し、送信周期タイマを再起動する。また高速設定要求を受けると送信周期タイマを高速設定し、以後の自車両走行情報の送信間隔が短くなる。通信制御部203の処理詳細については図10のフローチャートを用いて後述する。
ステップS706では、注意対象車両ID検出タイマ開始(リスタート)としステップS707に処理を移行する。ここで、注意対象車両ID検出タイマは、自車両が注意対象車両として設定された後、引き続き周辺車両から注意対象車両として設定されているか否かを判定するためのタイマである。即ち、ステップS706では、自身が注意対象車両の期間はタイマを更新して、ステップS704の高速設定を維持するものである。
ステップS707では、注意車両検出処理を実行し、ステップS708に処理を移行する。即ち、ステップS707では、周囲車両からの受信データから注意対象車両が存在するか否かを、例えば、後述の図8で説明するように検出する。
ステップS709では、車両走行情報更新処理を行い、ステップS710に処理を移行する。即ち、ステップS709では、例えば後述の図9で説明するように、自車両の走行情報の送信処理を実行するものである。
ステップS710では、注意対象車両情報ID検出タイマが終了か否かを判定する。終了の時にはステップS711に処理を移行し、否の時には図7の処理(ナビ制御部101の車両走行情報処理)を終了する。
ステップS711では、自車両の走行情報更新周期タイマを通常設定とし、ステップS712に処理を移行する。即ち、ステップS711では、ステップS706において設定したタイマ更新処理が実行されず、自車両が注意対象車両から外れたと判断して、タイマの設定を通常の自車両走行情報の送信周期に戻すものである。
ステップS712では、通信制御部203の送信周期タイマを通常設置とし図7の処理を終了する。
例えば、図7のステップS707では、注意車両検出処理を実行し、ステップS708に処理を移行する。即ち、ステップS707では、周囲車両からの受信データから注意対象車両が存在するか否かを、この図8の実施例で説明するように検出する。
まず、ステップS801では、他車両走行情報格納部1016へ受信した車両走行情報を格納し、ステップS802に処理を移行する。
ステップS802では、自車両と他車両の位置と方向情報から、自車との距離と位置を算出し、ステップS803に処理を移行する。
ステップS803では、自車両が左折対象交差点に接近しているか否かを、自車両の位置等の走行情報とマップ情報から判定する。自車両が左折対象交差点に接近しているとの判定の時にはステップS804に処理を移行し、否の時にはステップS810に処理を移行する。
ステップS804では、自車両の後方に二輪車が検出されたか否かを判定する。検出された時にはステップS805に処理を移行し、否の時にはステップS810に処理を移行する。
ステップS805では、既に表示済みの二輪車が検出されたか否かを判定する。検出された時にはステップS808に処理を移行し、否の時にはステップS806に処理を移行する。
ステップS806では、出力部102に、後方に二輪車が接近する旨を通知する図13に示した情報を表示出力しステップS807に処理を移行する。
ステップS807では、受信車両IDを自車両送信情報の注意車両IDに設定し、図8の処理を終了する(若しくは、図7のステップS708に処理を移行する)。
ステップS808では、前回受信したデータから更新が有るか否かを判定する。更新有りの時にはステップS809に処理を移行し接近車両の表示場所更新を行い、否の時には図8の処理を終了する(若しくは、図7のステップS708に処理を移行する)。
ステップS811では、後方に二輪車接近の情報の表示出力を停止し、ステップS812に処理を移行する。
ステップS812では、ステップS807で設定した自車両の車両走行情報の注意対象車両IDの設定を解除し、図8の処理を終了する(若しくは、図7のステップS708に処理を移行する)。
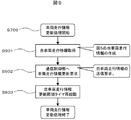
例えば、図7のステップS709では、車両走行情報更新処理を行い、ステップS710に処理を移行する。即ち、ステップS709では、この図9で説明するように、自車両の走行情報の更新処理を実行するものである。
先ず、ステップS901では、自車両の走行情報を取得し、ステップS902に処理を移行する。自車両の走行情報は、例えば、図5で説明したような項目および内容である。
ステップS902では、通信制御部203へ自車両の走行情報の更新要求(自車両走行情報の送信要求)を出し、ステップS903に処理を移行する。
ステップS903では、自車両の走行情報更新周期タイマを再起動(リスタート)し、図9の処理を終了する(若しくは、図7のステップS710に処理を移行する)。
ステップS1001では、無線通信部201がデータ受信されたか否かを判定する。データ受信がある時にはステップS1002に処理を移行し、否の時にはステップS1003に処理を移行する。
ステップS1002では、通信制御処理部2032がデータ受信処理を実行し、ステップS1003に処理を移行する。詳細実施例は、後述の図11で説明する。
ステップS1004では、車両走行情報更新処理を実行し、ステップS1005に処理を移行する。
ステップS1005では、ナビゲーション部100からの車両走行情報送信周期タイマの設定要求を受信したか否かを判定する。受信した時にはステップS1006に処理を移行し、否の時にはステップS1007に処理を移行する。
ステップS1006では、送信周期タイマ設定の更新処理を実行しステップS1007に処理を移行する。即ち、ステップS1006では、ステップS705やステップS702等でのタイマ設定の変更要求を受信して送信周期を設定する。
ステップS1007では、自車両走行情報の送信周期タイマが終了したか否かを判定する。終了の時にはステップS1008に処理を移行し、否の時には図10の処理を終了する。
ステップS1008では、無線通信部201へ送信データ設定指示を行いステップS1009に処理を移行する。
ステップS1009では、送信周期タイマを再起動し、図10の処理を終了する。
ステップS1101では、受信データ格納部2034に受信データが有るか否かを判定する。受信データが有る時にはステップS11102に処理を移行し、否の時には図11の処理を終了し、例えば図10のステップS1003に処理を移行する。
ステップS1102では、受信データが受信済みのものであるか否かを判定する。受信済みのデータである時にはステップS1103に処理を移行し、否の時にはステップS1104に処理を移行する。
ステップS1103では、受信済みのデータを破棄し、図11の処理を終了する。
ステップS1104では、ナビゲーション部100へ、受信データ格納部2034に有るデータを出力して図11の処理を終了する。
図12において、自車両400は走行中には、車両走行情報の送信処理S1201を実行している。この場合、自車両400は時刻m0で車両走行情報S1202を同報送信しており、その後もs[s]間隔(時刻m1、m2、m3、m4、m5、m6、‥‥‥)で送信している。
一方、二輪車402は、車両走行情報の送信処理S1203を実行している。この場合、時刻m0で送信された自車両400の車両走行情報を受信し、時刻w1で自車両(二輪車402)の走行情報S1204を送信している。そして、その後もt[s]間隔(時刻w2、w3、w4)で送信している。
時刻m2の時点で、自車両400は、二輪車402を注意車両として指定し、車両走行情報に注意対象車両IDを付加して送信する(S1204)。この時、この注意対象車両IDを付加された車両走行情報を受信した二輪車402は、自車両が注意車両とされたことを認識する。そして自車両が注意車両であることに基づいて、送信頻度をt[s]間隔から、t[s]より短い時間間隔であるu[s]間隔(時刻w5、w6、w7、w8、w9、w10)に変更して、自車両の走行情報を送信する処理S1205を実行する(t>u)。
その後、自車両400は時刻m5、m6、‥‥‥に車両走行情報S1202を同報送信し、また二輪車402もまた、t[s]間隔で、時刻w11、w12、w13、‥‥‥と車両走行情報S1204を送信する。
このように、自車両400のナビゲーション部100の出力部102のディスプレイに道路地図情報と共に、接近中の二輪車が表示され、かつ「左後方側に二輪車走行中です。注意してください。」とテロップが出されたり、或いは出力部102の図示しないスピーカから音声出力される。
このように、二輪車402のナビゲーション部100の出力部102のディスプレイに道路地図情報と共に、接近中の車両が表示され、かつ「右前方側に車両走行中です。注意してください。」とテロップが出されたり、或いは出力部102の図示しないスピーカから音声出力される。
図15に示すように、横軸の時間tに対して、注意警戒車両が未検出の時には、車両A、車両B、車両C、車両D、車両E、車両F、二輪車、車両A、車両B、車両C、車両D、車両E、車両F、二輪車、車両A、車両B、車両C、車両D、‥‥‥と全ての車両の走行情報が、同一の間隔で他車両走行情報格納部1016に格納されている。従って、二輪車402を含め、すべての車両は同一間隔(時間m)で格納される。
しかし、注意警戒車両検出時には、図17に示すように、車両A、車両B、車両C、二輪車、車両D、車両E、車両F、二輪車、車両A、車両B、車両C、二輪車、車両D、車両E、車両F、二輪車、車両A、車両B、‥‥‥と、注意警戒車両とされた二輪車402の走行情報が、送信周期が短く(時間間隔n、n<m)なって送信されてくる。このため、二輪車402だけが頻繁に受信され、二輪車402の走行情報の受信成功率が高くなる。
また図18は、注意対象車両を検出時にナビ制御部101の他車両走行情報格納部1016が周辺車両から受信した各車両の車両走行情報を蓄積中に通信エラーが発生した場合の車両走行情報格納図である。
図17では、二輪車402の走行情報受信時に、受信エラーが発生した時には、次の二輪車402の走行情報受信までの間隔(時間p)が長く、注意対象車両を未検出時には、それだけ待つ必要があった。
しかし、注意対象車両を検出時には、注意車両である二輪車402の走行情報受信時に、受信エラーが発生した時には、送信間隔が短い(時間q、q<p)ため、次の二輪車402の走行情報受信までの間隔が短くなり、受信時間若しくは間隔が小さくなることが分かる。
また周辺車両台数が多数存在する場合や、通信環境の劣化によるエラーが発生した場合に、対象車両の送信頻度を多くすることにより対象車両から受信するデータの処理遅延を改善することが可能となる。
本発明の交通情報通信システムの第二の実施例を図面によって説明する。
図19は、本発明のナビ制御部101が他車両と車両走行情報の送受信を行う場合の車両走行情報処理の一実施例を説明するためのフローチャートである。
図19において、ナビ制御部101は、ステップS701において、車両走行情報受信通知があるか否かを判定する、否の時にはステップS708に処理を移行し、受信通知がある時にはステップS1801に処理を移行する。
ステップS1801では、受信した車両走行情報の注意対象車両IDの指定に、自車IDの設定が有るか否かを判定する。指定がある時にはステップS702に処理を移行し、否であればステップS707に処理を移行する。即ち、ステップS1801では、注意対象車両IDに設定がある場合には、注意対象車両に対する送信周期間隔を短く(送信頻度を高速に)切替え、対象外の車両には送信周期長く(送信頻度をを低速に)切替える処理を実施するものである。また注意対象車両IDの設定が全く無い場合には、周辺車両の検出処理を実施するものである。
ステップS1802では、自車両走行情報更新周期を長く(送信頻度を低速に)設定しているか否かを判定する。否である時はステップS1803に処理を移行し、送信頻度が低速に設定されている時にはステップS706に処理を移行する。
ステップS1803では、自車両の走行情報更新周期タイマを低速に設定し、ステップS1804に処理を移行する。
ステップS1804では、通信制御部203へ送信周期タイマ低速設定としステップS706に処理を移行する。
その他のステップは図7と同様である。
図21は、注意対象車両を検出時に、本発明のナビ制御部101の他車両走行情報格納部1016が周辺車両から受信した各車両の車両走行情報を蓄積中に通信エラーが発生した場合の一実施例を示す図である。
図20では、注意対象の二輪車402の送信頻度が多くなり、注意対象外の車両の送信頻度が減少したことにより、二輪車402の車両走行情報の受信頻度が多くなることを示している。
また図21では、図20の送信頻度の場合に、通信エラーが発生した時の状況を示す。二輪車402の車両走行情報送信時に通信エラーが発生しても、送信間隔が短いため、次に二輪車402からのデータ(車両走行情報)を受信するまでの間隔が短いのが分かる。
また、周辺車両台数が多数存在する場合や、通信環境の劣化によるエラーが発生した場合に、対象車両から受信するデータの処理遅延を改善することが可能となる。
なお、上記実施例では、自車両が注意車両とされたことを認識した車両は、自身の走行情報の送信頻度を多くした。しかし、送信頻度を多くする他、送信出力を大きくしても良いし、送信頻度を多くし、かつ、送信出力を大きくしても良い。
本発明の交通情報通信システムの実施例を図22、図23及び図24によって説明する。
図22は、本発明の交通情報通信システムにおいて、自車両400が、周辺の車両及び交差点に設置された路側機2201と無線通信を行う場合の一実施例を示した車両配置図である。2201は車両との間で無線通信により交通情報、災害情報等の送受信を行う路側機である。その他の構成部は図6と同様である。
また図23は、本発明のナビ制御部101が他車両との車両走行情報の送受信処理、路側機2201との送受信処理を行う場合の車両走行情報処理の一実施例を示すフローチャートである。
また図24は、ナビ制御部101の車両走行情報処理において、路側機2201からの情報を受信処理する場合の本発明の一実施例のフローチャートである。
ナビ制御部101が車両走行情報の処理を開始すると、ステップS2301では、路側機2201から受信通知が有るか否かを判定する。路側機2201からの受信通知が有る時にはステップS2302に処理を移行し、否である時はステップS701に処理を移行する。
ステップS2302では、路側機2201からの情報を受信処理し、ステップS701に処理を移行する。
ステップS701移行は、図7と同様である。
図24において、先ずステップS2401では、注意車両検出中か否かを判定する。否で有るときにはステップS2402に処理を移行し、注意車両検出中である時にはステップS2405に処理を移行する。
ステップS2402では、路側機2202へ送信頻度を減少するように要求中か否かを判定する。要求中である時にはステップS2403に処理を移行し、否の時にはステップS2404に処理を移行する。
ステップS2403では、路側機2201へ送信頻度の通常化要求を出し、路側機2201が送信する交通情報、災害情報等の送信頻度を通常の頻度に設定するようにして、ステップS2404に処理を移行する。
ステップS2404では、路側機2201から受信した情報の表示処理を実行し、図24の処理(図23のステップS2302)を終了する。
またステップS2405では、路側機2201へ送信頻度減少要求を出し、路側機2201が送信する交通情報、災害情報等の送信頻度を減少させるようにして、図24の処理(図23のステップS2302)を終了する。
また周辺車両台数が多数存在する場合や、通信環境の劣化によるエラーが発生した場合、対象車両から受信するデータの処理遅延を改善することが可能となる。
さらに本実施例では、車載通信装置300が注意対象車両を検出中の場合は、路側機2201に対して送信頻度を減少させるよう動作するが、路側機2201から受信する交通情報、災害情報と、車車間通信による周囲車両の通知処理情報に優先順位を設け、路側機2201から受信する情報の優先順が高い場合は路側機2201に対し送信頻度減少要求を行わないように動作しても構わないし、また車載通信装置300が通信する周辺の車両に対し車両走行情報の送信頻度を減少するように要求しても構わない。
本発明の交通情報通信システムの実施例を図25から図34によって説明する。
400は自車両、401は車両A、600は歩行者A、500は歩行者Aの所持する携帯電話装置Aである。
自車両400において、1000はドライバに対し目的地までの誘導を行うナビゲーション機能等を搭載したナビゲーション部、2501はナビゲーション部1000内の各部の制御処理を行うナビ制御部、102はスピーカやモニタなど音声出力や画像情報の表示出力を行う出力部、103はドライバがナビゲーション部1000に目的地等の設定などの入力を行う入力部である。また、通信装置部200は図1と同様である。また、3000はナビゲーション部1000と通信装置部200で構成される車載通信装置である。
自車両400は、車載通信装置3000を搭載する。車両A401は、自車両400の周辺を走行し車載通信装置300を搭載し車両走行情報の送受信を行う。また、通信装置部200が通信する車両走行情報は、例えば、自車ID、走行位置、速度、走行向き、ブレーキ、アクセルの状態等の情報である。詳細は図27で説明する。
図27は、自車両400が周辺歩行者へ送信する車両走行情報の内容の一実施例を示した図である。図27(a) は、車両間で送受信し、また歩行者に対し送信する車両走行情報の内容を示す表である。また図27(b) は、車両走行情報を通信装置部200に送信する時のデータフォーマットである。
図27においては、図5に示すデータ項目において、検出した自車へ接近する端末のIDの項目に、周辺歩行者の所持する携帯電話装置より受信した歩行者情報から検出した注意警戒が必要な端末IDを示す注意対象端末IDを追加したものである。なお、図27(b) において、注意対象車両IDのデータ量は2Byteとしているが、複数台の車両及び複数人の歩行者に対応するため、2Byte以上としても良い。また、図27(a) で、ブレーキ、アクセルの内容が、「ON:OFF」となっているが、当該二値の情報に限定されるものではなく、ブレーキ、アクセルの使用状態に応じて、段階的にデータ量を示す情報とするものであっても良い。
図25において、ナビ制御部2501は、これらの車両走行情報を取得すると、図27(b) に示した車両走行情報データフォーマットに変換した後、通信装置部200に送信要求する。
501は音声情報出力や画像情報などを表示出力する出力部、502は音声入力やデータ通信の開始などの入力操作を行う入力部、503は他の携帯電話装置と音声通話や、センタ装置と無線通信を行う携帯電話無線通信部、504は周辺を走行する車両に搭載される無線装置部200との間で無線通信を行う車両間無線通信部、505は周辺を走行する車両から受信した車両走行情報の処理と解析を行い歩行者情報を生成し送信制御を行う車両情報処理部、506はGPSを搭載し自身の位置情報(例えば、緯度と経度)を取得し、進行方向を算出する位置情報取得部、507は携帯電話装置500全体を制御する携帯電話制御部である。
携帯電話無線通信部503は、携帯電話制御部507から要求された接続要求に応答して、要求先と無線通信接続を行ってから、無線通信接続完了応答を携帯電話制御部507に出力する。
携帯電話制御部507は、携帯電話無線通信部503から無線通信接続完了応答を受けると、出力部501を制御して、無線通信接続通知表示を行う。その後、歩行者A600の入力内容に従い、音声通話若しくはデータ通信を実施する。
また、携帯電話無線通信部503から着信通知を受信すると、出力部501を制御して着信表示を行い、歩行者A600に通知する。その後、携帯電話制御部507は、歩行者A600が入力部502を介して入力する入力内容に応じて無線通信接続を実施する。
図28において、車両情報処理部505は、位置情報取得部506から場所、方向などの歩行者情報を取得し、図29(b) に示した歩行者情報データフォーマットに変換した後、所定のタイミングで車両間無線通信部504に送信要求する。
図31において、自車両400は、走行中には、車両走行情報の送信処理S3101を実行している。この場合、自車両400は時刻k0で車両走行情報(S3102)を同報送信しており、その後もs[s]間隔(時刻k1、k2、‥‥‥)で送信している。
一方、携帯電話装置A500は、時刻k0で送信された自車両400の車両走行情報を受信し、時刻f1で歩行者の走行者情報(S3104)の送信処理(S3103)を開始する。そして、その後もt[s]間隔(時刻f2、‥‥‥)で送信する。例えば、時刻f2で歩行者情報(S3105)を送信する。
しかし、その後更に時間が経過し、時刻k3では、自車両400の通信装置部200が送信する車両走行情報(S3106)に注意対象端末IDが付加されていて、それを受信した携帯電話装置A500が、その注意対象端末IDが自端末IDであると判定した場合には、自携帯電話装置A500の出力部501に注意表示を出力(S3107)し、かつ歩行者情報(S3108)を送信する。
その後、時刻k6で、自車両400のナビゲーション部1000が注意対象端末IDを付加しないで車両走行情報(S3109)を送信するか、あるいは、携帯電話装置A500が付加された注意対象端末IDが自携帯端末IDと一致しないと判定すれば、携帯電話装置A500は、出力部501に注意表示を表示することを終了する(S3110)。
図32における処理フローチャートは、図7の処理フローチャートに、ステップS3201とS3202を追加したものである。従って、追加した処理動作について説明し、他は省略する。
ナビ制御部2501が車両走行情報の処理を開始すると、ステップS3201では、歩行者情報受信通知が有るか否かを判定する。歩行者情報受信通知が有る時にはステップS3202に処理を移行し、否である時はステップS701に処理を移行する。
ステップS3202では、受信した歩行者情報を受信処理し、ステップS701に処理を移行する。
ステップS701移行は、図7と同様である。
図33において、歩行者情報受信処理が開始されると、ステップS3301では、歩行者情報格納部2601へ受信した歩行者情報を格納し、ステップS3302に処理を移行する。
ステップS3302では、位置や方位情報から自車との距離を算出し、ステップS3303に処理を移行する。
ステップS3303では、自車との距離が前回取得した時よりも接近しているか否かを判定する。前回より接近している時にはステップS3304に処理を移行し、否である時にはステップS3310に処理を移行する。
ステップS3304では、歩行者の進行方向が自車と接近する向きであるか否かを判定する。歩行者の進行方向が自車と接近する向きである時には、ステップS3305に処理を移行し、否である時にはステップS3310に処理を移行する。
ステップS3306では、設定された接近検出端末IDが既に表示済みのIDであるか否かを判定する。既に表示済みである時にはステップS3308に処理を移行し、否である時にはステップS3307に処理を移行する。
ステップS3307では、出力部102に歩行者接近を表示出力し、図33の歩行者情報受信処理を終了する。
ステップS3308では、前回受信したデータから更新されたデータであるか否かを判定する。更新有の時にはステップS3309に処理を移行し、否である時には図33の歩行者情報受信処理を終了する。
ステップS3309では更新情報部分を出力部102に表示出力し、図33の歩行者情報受信処理を終了する。
ステップS3311では、歩行者接近の出力を終了しステップS3312に処理を移行する。
ステップS3312では、受信携帯端末IDを注意対象端末IDとして設定中であるか否かを判定する。設定中である時には、ステップS3313に処理を移行し、否である時には図33の歩行者情報受信処理を終了する。
ステップS3313では、注意対象端末IDの設定を解消(クリア)して図33の歩行者情報受信処理を終了する。
ステップS3401では、車両間無線通信部504からデータ受信が有るか否かを判定する。データ受信有りの時にはステップS3402に処理を移行し、否の時にはステップS3409に処理を移行する。
ステップS3402では、車両間無線通信部504を通信中に設定しステップS3403に処理を移行する。
ステップS3403では、車両間無線通信部504からのデータが受信済みのデータであるか否かを判定する。受信済みである時にはステップS3404に処理を移行し、否である時にはステップS3405に処理を移行する。
ステップS3404では、データを破棄し図34の処理を終了する。
ステップS3406では、出力部501に車両接近を表示出力しステップS3407に処理を移行する、
ステップS3407では、歩行者情報送信周期タイマが起動開始しているか否かを判定する。否である時にはステップS3408に処理を移行し、タイマが起動開始している時にはステップS3411に処理を移行する。
ステップS3408では、歩行者情報送信周期タイマを起動開始し、ステップS3411に処理を移行する。
ステップS3410では、一定期間データ受信が無い時には車両間無線通信部504を通信停止中に設定し、ステップS3411に処理を移行する。
ステップS3411では、歩行者情報送信周期タイマのカウントが完了したか否かを判定する。カウント完了の時にはステップS3412に処理を移行し、否である時には図34の処理を終了する。
ステップS3412では、車両間無線通信部504が通信中であるか否かを判定する。通信中である時にはステップS3413に処理を移行し、否である時には図34の処理を終了する。
ステップS3413では、自身の位置情報を取得し、ステップS3414に処理を移行する。
ステップS3414では、歩行者情報を生成して送信し、ステップS3415に処理を移行する。
ステップS3415では、歩行者情報送信周期タイマを起動開始し、図34の処理を終了する。
すなわち、車両間無線通信部504が周辺車両からデータを受信している間は状態を通信中に設定し、一定周期毎に歩行者情報送信処理を行い、一定期間データを受信しない場合は状態を通信停止中に設定し、歩行者情報送信処理は行わない。
また、上記実施例4では、歩行者が所持する携帯電話装置を使用している。携帯電話装置に限る必要はなく、業務用無線機等の携帯通信装置であれば良い。
Claims (2)
- 車両に搭載する車載通信装置が無線で通信する交通情報通信システムにおいて、
上記車載通信装置は、
上記搭載された車両の少なくとも自車両の位置情報、及び自車両通信装置を特定する車両IDを含む車両走行情報を取得するナビゲーション部と、上記ナビゲーション部が取得した上記車両走行情報を所定の送信頻度で同報送信し、他車両の車両通信装置から受信した車両走行情報若しくは上記携帯電話装置から受信した歩行者情報を上記ナビゲーション部に出力する通信装置部とを備え、
上記車載通信装置は、
上記通信装置部が受信した上記車両走行情報から自車両の走行方向に接近する周辺車両を検出した場合には、当該周辺車両を特定する車両IDを自車の車両走行情報に付加して送信し、
上記車両IDを受信した周辺車両の車載通信装置は、受信した車両IDと自身の車両IDが一致した場合には、自身が送信する車両走行情報の送信頻度を多くするか若しくは送信出力を大きくし、受信した車両IDと自身の車両IDが一致しなかった場合には、自身が送信する車両走行情報の送信頻度を少なくするか若しくは送信出力を小さくして送信する交通情報通信システムであって、
更に道路上に路側通信装置を備え、
上記車載通信装置は更に、
上記路側通信装置から無線で送信される道路情報を受信している場合に、上記通信装置部が受信した上記車両走行情報から自車両の走行方向に接近する周辺車両を検出した場合には、上記路側通信装置に対して、送信頻度を少なくするか若しくは送信出力を小さくするように要求することを特徴とする交通情報通信システム。 - 車両に搭載され、道路上に設置された路側通信装置が無線で通信する交通情報通信システムにおける車載通信装置であって、
上記搭載された車両の少なくとも自車両の位置情報、及び自身の車載通信装置を特定する車両IDを含む車両走行情報を取得するナビゲーション部と、
上記ナビゲーション部が取得した上記車両走行情報を所定の送信頻度で同報送信し、他車両の車両通信装置から受信した車両走行情報を上記ナビゲーション部に出力する通信装置部とを備え、
上記通信装置部が受信した上記車両走行情報から自車両の走行方向に接近する周辺車両を検出した場合には、当該周辺車両を特定する車両IDを自車の車両走行情報に付加して送信し、
上記車両IDを受信した周辺車車両の車両通信装置は、受信した車両IDと自身の車両IDが一致した場合には、自身が送信する車両走行情報の送信頻度を多くするか若しくは送信出力を大きくし、受信した車両IDと自身の車両IDが一致しなかった場合には、自身が送信する車両走行情報の送信頻度を少なくするか若しくは送信出力を小さくし、
上記路側通信装置から無線で送信される道路情報を受信している場合に、上記通信装置部が受信した上記車両走行情報から自車両の走行方向に接近する周辺車両を検出した場合には、上記路側通信装置に対して、送信頻度を少なくするか若しくは送信出力を小さくするように要求することを特徴とする車載通信装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008059226A JP5027696B2 (ja) | 2008-03-10 | 2008-03-10 | 交通情報通信システム及び車載通信装置 |
| EP09001169.3A EP2101305B1 (en) | 2008-03-10 | 2009-01-28 | Traffic information communication system, on-board communication device, and mobile terminal |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008059226A JP5027696B2 (ja) | 2008-03-10 | 2008-03-10 | 交通情報通信システム及び車載通信装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009217438A JP2009217438A (ja) | 2009-09-24 |
| JP2009217438A5 JP2009217438A5 (ja) | 2010-10-28 |
| JP5027696B2 true JP5027696B2 (ja) | 2012-09-19 |
Family
ID=40809931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008059226A Expired - Fee Related JP5027696B2 (ja) | 2008-03-10 | 2008-03-10 | 交通情報通信システム及び車載通信装置 |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2101305B1 (ja) |
| JP (1) | JP5027696B2 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5691239B2 (ja) * | 2010-05-20 | 2015-04-01 | 日産自動車株式会社 | 運転支援装置及び運転支援方法 |
| DE102010054087A1 (de) | 2010-12-10 | 2012-06-14 | Audi Ag | Verfahren zur drahtlosen Kommunikation zwischen einem Kraftfahrzeug und wenigstens einem anderen Kommunikationsteilnehmer und Kraftfahrzeug |
| JP5668643B2 (ja) * | 2011-08-23 | 2015-02-12 | 株式会社デンソー | 地図表示システム、サーバ、及び端末 |
| JP5895500B2 (ja) * | 2011-12-13 | 2016-03-30 | 日産自動車株式会社 | 車両運転支援装置及び車両運転支援方法 |
| JP6058654B2 (ja) | 2012-05-31 | 2017-01-11 | クラリオン株式会社 | 車載情報システム、情報端末、アプリケーション実行方法 |
| US9536427B2 (en) | 2013-03-15 | 2017-01-03 | Carnegie Mellon University | Methods and software for managing vehicle priority in a self-organizing traffic control system |
| JP6182923B2 (ja) | 2013-03-21 | 2017-08-23 | 株式会社デンソー | 無線通信装置、車両用ユニット、及び表示装置 |
| JP5961137B2 (ja) * | 2013-05-01 | 2016-08-02 | 日本電信電話株式会社 | 無線通信システム、無線端末装置及び無線通信方法 |
| EP2821979A1 (en) | 2013-07-01 | 2015-01-07 | Nxp B.V. | Active beacon for vulnerable road users |
| JP2015045949A (ja) * | 2013-08-27 | 2015-03-12 | パナソニック株式会社 | 端末装置および車載用無線装置 |
| CN103632575B (zh) * | 2013-12-16 | 2016-05-18 | 杨杰 | 基于移动通信网络的汽车避险方法 |
| US10257770B2 (en) * | 2014-04-28 | 2019-04-09 | Harman International Industries, Incorporated | Pedestrian detection |
| CN104575068A (zh) * | 2014-12-29 | 2015-04-29 | 芜湖市汽车产业技术研究院有限公司 | 一种提示驾驶员的方法和装置 |
| JP6072328B2 (ja) * | 2016-03-08 | 2017-02-01 | パナソニック株式会社 | 無線装置 |
| CN109937440B (zh) | 2016-11-17 | 2021-09-10 | 三菱电机株式会社 | 车载装置、便携终端装置、识别辅助系统以及识别辅助方法 |
| GB2562706A (en) * | 2017-03-22 | 2018-11-28 | Pelotron Ltd | Apparatus for enhancing safety of a vulnerable road user |
| WO2019044208A1 (ja) * | 2017-08-29 | 2019-03-07 | パナソニック株式会社 | 端末装置、路側装置、通信システム、および通信方法 |
| WO2019044007A1 (ja) * | 2017-08-29 | 2019-03-07 | パナソニック株式会社 | 端末装置、路側装置、通信システム、および通信方法 |
| JP7183438B2 (ja) * | 2019-09-18 | 2022-12-05 | 本田技研工業株式会社 | 運転支援装置、運転支援方法及びプログラム |
| JP2023061664A (ja) * | 2021-10-20 | 2023-05-02 | ソニーグループ株式会社 | 車載通信装置、端末装置、通信方法、情報処理方法及び通信システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4321068B2 (ja) | 2003-01-10 | 2009-08-26 | 沖電気工業株式会社 | 車両・歩行者間無線通信システム |
| JP4257643B2 (ja) * | 2003-06-17 | 2009-04-22 | マツダ株式会社 | 走行支援システム及び車載端末器 |
| US7095336B2 (en) * | 2003-09-23 | 2006-08-22 | Optimus Corporation | System and method for providing pedestrian alerts |
| JP4576887B2 (ja) * | 2004-06-02 | 2010-11-10 | 株式会社デンソー | 通信装置および制御方法 |
-
2008
- 2008-03-10 JP JP2008059226A patent/JP5027696B2/ja not_active Expired - Fee Related
-
2009
- 2009-01-28 EP EP09001169.3A patent/EP2101305B1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP2101305B1 (en) | 2015-10-14 |
| EP2101305A3 (en) | 2010-02-03 |
| JP2009217438A (ja) | 2009-09-24 |
| EP2101305A2 (en) | 2009-09-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5027696B2 (ja) | 交通情報通信システム及び車載通信装置 | |
| US10169991B2 (en) | Proximity awareness system for motor vehicles | |
| EP3159867B1 (en) | A method and apparatus for alerting a target vehicle of another vehicle | |
| JP5139126B2 (ja) | 車車間通信システム並びに車載通信装置及び携帯通信装置 | |
| KR102381372B1 (ko) | 센싱 정보에 기초한 주행 제어 방법 및 제어 디바이스 | |
| US11842631B2 (en) | Communication device, control method thereof and communication system including the same | |
| US10403140B2 (en) | Propagation of alerts regarding traffic events | |
| JP4989448B2 (ja) | 近傍車両監視装置 | |
| US20200184827A1 (en) | Electronic control device and vehicle comprising the same | |
| KR20090024264A (ko) | 차량 내외로 차량 관련 정보를 전송하는 방법 및 장치 | |
| JP2009003822A (ja) | 車車間通信装置 | |
| JP2013033324A (ja) | 周辺車両情報通知装置 | |
| JP2008114649A (ja) | クラクション制御装置 | |
| CN113795873A (zh) | 用于辅助车辆驾驶的电子装置和方法 | |
| JP2008269358A (ja) | 車両用駐車案内装置、及び駐車案内システム | |
| JP2008197740A (ja) | 車両用衝突予防安全装置、衝突予防安全システム、及び衝突予防安全情報センター | |
| JP5924395B2 (ja) | 周辺車両情報通知装置 | |
| JP5265027B2 (ja) | 無線通信装置 | |
| CN112230646A (zh) | 设计用于单车运行的自动驾驶系统下的车辆队列实施 | |
| JP2018139031A (ja) | 情報提供装置、情報提供方法およびコンピュータプログラム | |
| JP6367755B2 (ja) | 車載端末装置及びこれを備えた歩車間通信システム及び歩車間通信の停止方法 | |
| US11979805B2 (en) | Control method, communication terminal, and communication system | |
| CN115092126A (zh) | 车辆控制装置、车辆控制方法以及计算机可读取存储介质 | |
| WO2019138486A1 (ja) | 車載装置、判定方法、およびコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20100108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100914 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120321 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120327 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120521 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120612 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120622 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150629 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |