JP5011866B2 - 横すべり角推定装置、自動車、及び横すべり角推定方法 - Google Patents
横すべり角推定装置、自動車、及び横すべり角推定方法 Download PDFInfo
- Publication number
- JP5011866B2 JP5011866B2 JP2006199450A JP2006199450A JP5011866B2 JP 5011866 B2 JP5011866 B2 JP 5011866B2 JP 2006199450 A JP2006199450 A JP 2006199450A JP 2006199450 A JP2006199450 A JP 2006199450A JP 5011866 B2 JP5011866 B2 JP 5011866B2
- Authority
- JP
- Japan
- Prior art keywords
- slip angle
- side slip
- turning
- vehicle body
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/103—Side slip angle of vehicle body
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/21—Traction, slip, skid or slide control
- B60G2800/212—Transversal; Side-slip during cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/70—Estimating or calculating vehicle parameters or state variables
- B60G2800/702—Improving accuracy of a sensor signal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/90—System Controller type
- B60G2800/95—Automatic Traction or Slip Control [ATC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2230/00—Monitoring, detecting special vehicle behaviour; Counteracting thereof
- B60T2230/02—Side slip angle, attitude angle, floating angle, drift angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/20—Sideslip angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/20—Sideslip angle
Description
本発明の課題は、横すべり角を高精度に推定することである。
本発明に係る横すべり角推定装置によれば、異なる2方向への車体の加速度から遠心力の方向と車体の左右方向とでなす応用横すべり角を算出し、推定した横すべり角と算出した応用横すべり角との偏差に応じて積分演算に対するフィードバック補償を行うことで、車両のモデル化誤差や積分演算に伴うエラーの累積などに起因した推定誤差を修正することができるので、簡単な構成で容易に、しかも高精度に横すべり角を推定することができる。
《第1実施形態》
《構成》
図1は、車両の概略構成図である。図1(a)に示すように、自動車1には、車体の前後方向と進行方向とでなす横すべり角βを推定するために、例えばマイクロコンピュータで構成されたコントローラ2が搭載されている。また、図1(b)に示すように、自動車1の前輪3FL・3FRは、タイロッド4、ラック&ピニオン5、ステアリングシャフト6を順に介してステアリングホイール7に連結されており、ステアリングホイール7の回転運動が、ラック&ピニオン5によってタイロッド4の左右の直線運動に変換されることにより、前輪3FL・3FRがキングピン軸を中心に転舵される。
そして、コントローラ2には、舵角センサ11で検出した操舵角と、車速センサ12で検出した車速と、ヨーレートセンサ13で検出したヨーレートと、横加速度センサ14で検出した横加速度と、前後加速度センサ15で検出した前後加速度と、が入力される。
先ず、オブザーバについて説明する。
オブザーバの基となる車両の2輪モデルは、横方向の力とモーメントの釣り合いより、次式で示される。

m:車両質量
I:ヨー慣性モーメント
Lf:車両重心点と前車軸間の距離
Lr:車両重心点と後車軸間の距離
Cpf:前輪コーナリングパワー(左右合計)
Cpr:後輪コーナリングパワー(左右合計)
V:車速
β:横すべり角
γ:ヨーレート
Gy:横加速度
a11,a12,b1:行列A,Bの各要素
この状態方程式を元に、車両横すべり角βを推定する線形2入力オブザーバを設計する。オブザーバへの入力は横加速度とヨーレートとし、オブザーバゲインKはモデル化誤差の影響を受けにくく、且つ安定した推定が行えるように設定する。なお、オブザーバの設計手法については、これに限定されるものではなく、全く異なる推定手法に置き換えてもよい。
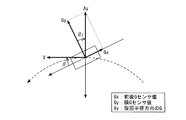
旋回時の車体に作用する遠心力(以下、『場の力』と称す)は、旋回中心から外側に向かって働く。したがって、図3に示すように、旋回を行う車両が横すべり角βを持って走行しているならば、車体に働く『場の力』も当然、車体の真横方向から横すべり角分ずれた方向に発生する。β=β2となることは、幾何学的にも明らかである。そこで、この『場の力』のずれ分β2を、Atan(Gy/Gx)を用いて算出することで、オブザーバの推定を補償するために用いる応用横すべり角として算出する。具体的な計算は、下記の通りである。
次に、第1実施形態の作用について説明する。
一般的な線形オブザーバは、車両モデル設計時に想定した路面状況でタイヤの横すべり角が非線形特性とはならない線形領域においては、正確な横すべり角βの推定を行うことができる。しかしながら、路面摩擦係数μが変化したり、旋回性能の限界に近づいたりしたときには、図6に示すように、オブザーバによる推定値が、計測値から徐々に逸脱してしまい、推定精度が低下してしまう。
そこで、図2に示すように、推定した横すべり角βと算出した応用横すべり角β2との差分に応じて、積分器21による積分演算に対してフィードバック補償を行う。これにより、積分演算に伴うエラーの累積などに起因した推定誤差が随時修正されるので、図6に示すように、推定値が計測値に近似する。
また、『場の力』に着目しているので、当然、応用横すべり角β2の算出精度は、『場の力』の発生度合に依存しており、略直進走行しているときや横加速度Gyやヨーレートが低い緩旋回領域では、その精度が低下してしまう。このとき、オブザーバで推定する横すべり角βは、モデル化誤差が小さくなる分、精度が高くなる。そこで、車両の旋回走行状態に応じてフィードバック補償の重みを変化させることで、オブザーバによる推定と推定補償器20によるフィードバック補償との双方の利点を生かして協調させる。具体的には、旋回走行状態が旋回性能の限界に近づくほど、ここでは横加速度Gyが大きくなるほど、フィードバックゲインK2を増加させることで、フィードバック補償の重みを増加させる。
また、同様の理由で、ゼロ割りが発生し得るような『場の力』の弱い非旋回領域では、応用横すべり角β2の値を0としてもよい。
上記の第1実施形態では、横加速度Gyに応じてフィードバックゲインK2の値を変化させているが、これに限定されるものではなく、要は、車両の旋回走行状態に変化させることができればよいので、ヨーレートに応じて変化させてもよい。
また、上記の第1実施形態では、オブザーバによって横すべり角βを推定すると共に、推定補償器20によって応用横すべり角β2を算出し、推定した横すべり角βと算出した応用横すべり角β2との偏差に応じてオブザーバが有する積分器21による積分演算に対してフィードバック補償を行っているが、これに限定されるものではない。すなわち、推定補償器20だけでも応用横すべり角β2を算出できるので、このβ2をそのまま横すべり角βとして推定してもよい。但し、実際の車両にこの手法を採用すると、センサノイズに敏感なため、そのまま推定器として用いるのは現実的ではなく、センシングした検出値にフィルタをかける等して、ノイズを除去することが望ましい。
以上より、図2のオブザーバが「推定手段」に対応し、横加速度センサ14及び前後加速度センサ15が「加速度検出手段」に対応し、推定補償器20による数3及び数4の演算処理が「算出処理」に対応し、推定補償器20が「補償手段」に対応する。
(1)走行状態を助変数とする積分演算を経て、車体の前後方向と進行方向とでなす横すべり角βを推定する推定手段と、異なる2方向への車体の加速度を検出する加速度検出手段と、この加速度検出手段で検出した車体の加速度に応じて、旋回時の車体に作用する遠心力の方向と車体の左右方向とでなす応用横すべり角β2を算出する算出手段と、推定手段で推定した横すべり角βと算出手段で算出した応用横すべり角β2との偏差に応じて推定手段の積分演算に対するフィードバック補償を行う補償手段と、を備える。
これにより、積分演算に伴うエラーの累積などに起因した推定誤差を修正することができるので、簡単な構成で容易に、しかも高精度に横すべり角βを推定することができる。
これにより、車速変化を伴う走行状態であっても、遠心力の方向と車体の左右方向とでなす応用横すべり角β2を正確に算出することができる。
(3)車両の旋回走行状態に応じて、フィードバック補償の重みを変化させる。
これにより、横すべり角βの推定とフィードバック補償との双方の利点を生かした協調作用を得られるので、システム全体として精度の高い横すべり角βを推定することができる。
これにより、横すべり角βの推定とフィードバック補償との双方の利点を生かした協調作用を確実に得られるので、システム全体として精度の高い横すべり角βを推定することができる。
(5)車両の旋回走行状態が非旋回領域にあるときにはフィードバック補償を中止する。
これにより、数3又は数4のAtanにてゼロ割りが発生して適切なフィードバック補償を行うことができないといった事態を回避し、推定精度への悪影響を防止することができる。
これによっても、数3又は数4のAtanにてゼロ割りが発生して適切なフィードバック補償を行うことができないといった事態を回避し、推定精度への悪影響を防止することができる。すなわち、推定した横すべり角βのドリフトや振動を抑制することができる。
(7)異なる2方向への車体の加速度を検出する加速度検出手段と、この加速度検出手段で検出した車体の加速度に応じて、旋回時の車体に作用する遠心力の方向と車体の左右方向とでなす応用横すべり角β2を算出し、算出した応用横すべり角β2を、車体の前後方向と進行方向とでなす横すべり角βとして算出する算出手段と、を備える。
《構成》
次に、本発明の第2実施形態について説明する。
この第2実施形態は、図7に示すように、主に直接積分法によって横すべり角βを推定するものである。この直接積分法とは、車両横方向の運動の釣り合いにより導かれる次式を積分することで、横すべり角βを求める手法である。
先ず、第1の補正部31では、旋回により発生する『場の力』と、横加速度Gy、横すべり角βの関係が次のようになることを補正原理として用いている。
次に、第2の補正部32では、図2の推定補償器20を除いたオブザーバによって、直接積分法とは別に横すべり角βを推定し、これら直接積分法による推定値とオブザーバによる推定値との偏差に応じてフィードバック補正を行う。直進状態、又はそれに近い走行パターンにおいては、モデル化誤差の影響が小さいため、線形オブザーバでも十分な精度で横すべり角βを推定できる。そこで、図8に示すように、横加速度Gyとヨーレートが低い非旋回領域では、ゲインK2を大きくし、限界挙動に近づくに連れてゲインK2を下げていく。
なお、各ゲインK1〜K3の比重、つまり相対的な重みは、車両の旋回走行状態に応じて変化させるものとし、横加速度Gy及びヨーレートが共に低いときには、略直進状態の非旋回領域にあると判断して第2の補正部32のゲインK2を相対的に増加させ、ヨーレートは発生するものの横加速度Gyが弱いときには、緩旋回領域にあると判断して第1の補正部31のゲインK1を相対的に増加させ、これら非旋回領域及び緩旋回領域から外れているときには補償部33のゲインK3を相対的に増加させる。
次に、第2実施形態の作用について説明する。
直接積分法は、モデル化誤差の心配がない反面、積分主体の手法であるため誤差が累積するという欠点がある。この解決策として、一般に積分の時定数を調節して誤差の累積量を減らす工夫などがなされているが、何かしらの推定エラーが発生するとしばらくその影響を受け続けてしまったり、長い時間、旋回状態が続くような場合には、蓄積しなくてはならない情報までカットしたりしてしまうため本質的な解決策とは言えない。
すなわち、略直進状態にあるときには、車両モデルによる線形オブザーバで高精度の横すべり角βを推定することができるので、この第2の補正部32によるフィードバック補正の重みを相対的に増加させる。また、ヨーレートは発生するものの横加速度Gyが弱くて『場の力』を確保しにくい等、ごく短時間のしかも緩い旋回走行状態にあるときには、第1の補正部31によるフィードバック補正の重みを相対的に増加させる。そして、横加速度Gyが増加し『場の力』を確保できる程度の旋回走行状態にあるときには、補償部33によるフィードバック補償の重みを相対的に増加させる。
上記の第2実施形態では、直接積分法を主体として横すべり角βを推定しつつ、旋回時における遠心作用の原理に基づくフィードバック補正と、線形オブザーバに基づくフィードバック補正と、推定補償器20に基づくフィードバック補償とを行っているが、これに限定されるものではない。すなわち、旋回時における遠心作用の原理に基づくフィードバック補正だけでも十分な効果が得られるので、線形オブザーバに基づくフィードバック補正や推定補償器20に基づくフィードバック補償を省略してもよい。
以上より、第1の補正部31が「第1の補正手段」に対応し、第2の補正部32が「第2の補正手段」に対応し、補償部33が「補償手段」に対応する。また、各ゲインK1〜K3の比重を変化させる演算処理が「変更手段」に対応している。
(1)推定手段が直接積分法によって横すべり角βを推定する場合、
旋回時における遠心作用の原理に基づき、推定手段で推定した横すべり角βと加速度検出手段で検出した車体の加速度とに応じて、助変数に対してフィードバック補正を行う第1の補正手段と、車両モデルを利用したオブザーバによって推定手段とは別に横すべり角βを推定し、推定した横すべり角βと推定手段で推定した横すべり角βとの偏差に応じて、この推定手段の積分演算に対してフィードバック補正を行う第2の補正手段と、
補償手段によるフィードバック補償、第1の補正手段によるフィードバック補正、及び第2の補正手段によるフィードバック補正の夫々の相対的な重みを、車両の旋回走行状態に応じて変化させる変更手段と、を備える。
これにより、各種フィードバック補正及びフィードバック補償の利点を生かした協調作用が得られるので、システム全体として精度の高い横すべり角βを推定することができる。
これにより、各種フィードバック補正及びフィードバック補償の利点を生かした協調作用を確実に得られるので、システム全体として精度の高い横すべり角βを推定することができる。
これにより、より簡単な構成で容易に、しかも高精度に横すべり角βを推定することができる。さらに、車両モデルにおけるモデル化誤差の心配もない。
《構成》
次に、本発明の第3実施形態について説明する。
この第3実施形態は、前述した推定補償器20で算出する応用横すべり角β2を、そのまま横すべり角βとして算出するものである。すなわち、次式より横すべり角βを算出する。
すなわち、計算方法は上記の式そのままで、算出結果をセンサのずれ角(ここでは、45[deg])分だけ戻せばよい。勿論、本実施形態では±45[deg]のずれ角としたが、このずれ角は任意に設定してよい。
次に、第3実施形態の作用について説明する。
数7のAtanにてゼロ割りが発生すると、値は発散してしまい横すべり角βを算出することができなくなってしまう。そこで、車両前後方向に対して±45[deg]ずらした2方向への加速度G1及びG2を検出し、これらG1及びG2を用いて横すべり角βを算出する。もし、全ての加速度センサの検出値が所定値以下となる(速度変化があり、加速度センサの検出値から速度変化分を減算したあとの値が所定値以下となる)なら、略直進状態であると判断し、横すべり角βを0にする。なお、一般の車両は、発生する横すべり角βの領域は限られているので、この領域から外れるように2つの加速度センサを設置すれば、常にゼロ割りの発生を回避することができる。
(1)車体の前後方向及び左右方向とは夫々異なる2方向への加速度を検出する。
これにより、数7のAtanにてゼロ割りが発生して横すべり角βを算出することができないといった事態を回避し、確実に横すべり角βをすることができる。
《構成》
次に、本発明の第4実施形態について説明する。
この第4実施形態は、ダブルレーンチェンジのように、左右への連続したステアリング操作がなされるときのフィードバック補償の精度を高めるために、前述した第1実施形態におけるフィードバックゲインK2を車両の旋回走行状態に応じて設定するものである。
ここで、フィードバックゲインK2の設定処理を、図10のフローチャートに従って説明する。
続くステップS2では、前述した図5の制御マップに従って、フィードバックゲインK2を算出する。
続くステップS3では、フィードバックゲインK2が0より大きいか否かを判定する。この判定結果が『K2=0』であるときには、そのままK2を0として所定のメインプログラムに復帰する。一方、判定結果が『K2>0』であるときには、ステップS4に移行する。
続くステップS5では、操舵角θ及び横すべり角βに基づいて、前輪スリップ角βFを算出する。
続くステップS6では、前輪スリップ角βFがヨーレートγと逆方向に発生しているか否かを判定する。ここで、βFがγと同方向に発生しているときには、車体に作用する遠心力が発生していると判断して、そのままK2を設定して所定のメインプログラムに復帰する。一方、βFがγと逆方向に発生しているときには、車体に作用する遠心力が一時的に消失すると判断してステップS7に移行する。
続くステップS8では、前輪スリップ角βFが横加速度Gyと同方向に発生したか否かを判定する。ここで、βFがGyと逆方向に発生しているときには、車体に作用する遠心力は再発生していないと判断して、上記ステップS7に戻り、車体に作用する遠心力が再発生するまでK2=0を維持する。一方、βFがGyと同方向に発生しているときには、車体に作用する遠心力が再発生すると判断して所定のメインプログラムに復帰する。
次に、第4実施形態の作用について説明する。
図11に示すように、車線変更時のダブルレーンチェンジのように、左右への連続したステアリング操作がなされると、旋回方向が一方から他方へ切換わる瞬間に、横すべり角βが残っているのに(|β|>0)、車体に作用する遠心力が一時的に消失するという現象が起こる。したがって、この遠心力が消失している間は、応用横すべり角β2を高精度に算出することができないので、フィードバック補償に影響を及ぼしてしまう。
遠心力の消失は、ヨーレートγと逆方向の前輪スリップ角βFが発生するか否かに基づいて判断する。このように、旋回方向と前輪スリップ角βFの発生方向とを比較することで、ドリフト走行を行うときのカウンターステアと、ダブルレーンチェンジを行うときのステアリング操作とを区別して、遠心力の消失を正確に予測する。すなわち、旋回方向と前輪スリップ角βFの発生方向とが一致するドリフト走行では、遠心力は消失しないからである。
上記の第4実施形態では、遠心力が再発生するまでの間は、フィードバックゲインK2を0に制限しているが、遠心力が消失すると判断した時点から所定時間が経過するまで、フィードバックゲインK2を制限するようにしてもよい。すなわち、ステアリング操作に対する車両挙動の応答時間は、各車両の諸元によって定まるので、少なくともこの応答時間が経過するまで、フィードバックゲインK2を制限すればよい。これによれば、容易に前述した作用効果を得ることができる。
以上より、図10のゲイン設定処理が「補償手段」の一部を構成している。
(1)補償手段は、車体に作用する遠心力が、車両の旋回走行状態に応じて一時的に消失すると判断したときには、当該遠心力が再発生するまで、フィードバック補償の重みを制限する。
これにより、ダブルレーンチェンジのような左右へ連続したステアリング操作がなされて、遠心力が一時的に消失するような場合に、応用横すべり角β2の誤算によってフィードバック補償の精度が低下する、といった事態を回避することができる。
これによれば、遠心力の再発生を検出しなくとも、単に経過時間を計測していればよいので、容易に上記の作用効果を得ることができる。
(3)補償手段は、旋回方向と逆方向の操舵角を検知したときに、車体に作用する遠心力が一時的に消失すると判断する。
これによれば、前輪スリップ角βFを演算しなくとも、単に操舵角θを検出していればよいので、容易に上記の作用効果を得ることができる。
これにより、ドリフト走行を行うときのカウンターステアと、ダブルレーンチェンジを行うときのステアリング操作とを区別して、遠心力の消失を正確に予測することができる。
(5)補償手段は、旋回方向と同方向の横加速度を検知したときに、遠心力が再発生すると判断する。
これにより、遠心力の再発生を容易に且つ確実に判断することができる。
これによれば、フィードバック補償の重みに対する不必要な制限を中止し、適切なタイミングで通常のフィードバック補償に復帰することができる。
(7)補償手段は、フィードバック補償の重みの変化速度を抑制する。
これによれば、フィードバック補償の重みを滑らかに変化させることができるので、過敏な応答を防止した望ましいフィードバック補償を実現することができる。
2 コントローラ
3FL・3FR 前輪
4 タイロッド
5 ラック&ピニオン
6 ステアリングシャフト
7 ステアリングホイール
11 舵角センサ
12 車速センサ
13 ヨーレートセンサ
14 横加速度センサ
15 前後加速度センサ
20 推定補償器
Claims (18)
- 操舵角、車速、ヨーレート、及び横加速度を走行状態として入力し、前記走行状態を助変数とする積分演算を経て、車体の前後方向と進行方向とでなす横すべり角を推定する推定手段と、異なる2方向への車体の加速度を検出する加速度検出手段と、該加速度検出手段で検出した車体の加速度に応じて、旋回時の車体に作用する遠心力の方向と車体の左右方向とでなす応用横すべり角を算出する算出手段と、前記推定手段で推定した横すべり角と前記算出手段で算出した応用横すべり角との偏差に応じて前記推定手段の積分演算に対するフィードバック補償を行う補償手段と、を備えることを特徴とする横すべり角推定装置。
- 前記算出手段は、車速の変化量と前記加速度検出手段で検出した車体の加速度とに応じて、旋回時の車体に作用する遠心力の方向と車体の左右方向とでなす応用横すべり角を算出することを特徴とする請求項1に記載の横すべり角推定装置。
- 前記補償手段は、ヨーレート又は横加速度の少なくとも一方を車両の旋回走行状態として入力し、前記旋回走行状態に応じて、前記フィードバック補償の重みを変化させることを特徴とする請求項1又は2に記載の横すべり角推定装置。
- 前記補償手段は、前記旋回走行状態が旋回性能の限界に近づくほど、前記フィードバック補償の重みを増加させることを特徴とする請求項3に記載の横すべり角推定装置。
- 前記補償手段は、車体に作用する遠心力が、前記旋回走行状態に応じて一時的に消失すると判断したときには、当該遠心力が再発生するまで、前記フィードバック補償の重みを制限することを特徴とする請求項3又は4に記載の横すべり角推定装置。
- 前記補償手段は、車体に作用する遠心力が、前記旋回走行状態に応じて一時的に消失すると判断したときには、当該遠心力が消失すると判断した時点から所定時間が経過するまで、前記フィードバック補償の重みを制限することを特徴とする請求項3又は4に記載の横すべり角推定装置。
- 前記補償手段は、旋回方向と逆方向の操舵角を検知したときに、車体に作用する遠心力が一時的に消失すると判断することを特徴とする請求項5又は6に記載の横すべり角推定装置。
- 前記補償手段は、旋回方向と逆方向の操舵輪スリップ角を検知したときに、車体に作用する遠心力が一時的に消失すると判断することを特徴とする請求項5〜7の何れか一項に記載の横すべり角推定装置。
- 前記補償手段は、旋回方向と同方向の横加速度を検知したときに、前記遠心力が再発生すると判断することを特徴とする請求項5〜8の何れか一項に記載の横すべり角推定装置。
- 前記補償手段は、旋回方向が一方から他方へ移行する前に、一方への操舵角に復帰したときには、前記フィードバック補償の重みに対する制限を解除することを特徴とする請求項5〜9の何れか一項に記載の横すべり角推定装置。
- 前記補償手段は、前記フィードバック補償の重みの変化速度を抑制することを特徴とする請求項5〜10の何れか一項に記載の横すべり角推定装置。
- 前記補償手段は、ヨーレート又は横加速度の少なくとも一方を車両の旋回走行状態として入力し、前記旋回走行状態が非旋回領域にあるときには、前記フィードバック補償を中止することを特徴とする請求項1〜11の何れか一項に記載の横すべり角推定装置。
- 前記算出手段は、ヨーレート又は横加速度の少なくとも一方を車両の旋回走行状態として入力し、前記旋回走行状態が非旋回領域にあるときには、前記応用横すべり角を0にすることを特徴とする請求項1〜12の何れか一項に記載の横すべり角推定装置。
- 前記推定手段が直接積分法によって前記横すべり角を推定する場合、
旋回時における遠心作用の原理に基づき、前記推定手段で推定した横すべり角と前記加速度検出手段で検出した車体の加速度とに応じて、前記助変数の横加速度に対してフィードバック補正を行う第1の補正手段と、車両モデルを利用したオブザーバによって前記推定手段とは別に前記横すべり角を推定し、推定した横すべり角と前記推定手段で推定した横すべり角との偏差に応じて、当該推定手段の積分演算に対してフィードバック補正を行う第2の補正手段と、
ヨーレート及び横加速度を車両の旋回走行状態として入力し、前記補償手段によるフィードバック補償、前記第1の補正手段によるフィードバック補正、及び前記第2の補正手段によるフィードバック補正の夫々の相対的な重みを、前記旋回走行状態のヨーレート及び横加速度に応じて変化させる変更手段と、を備え、
前記第1の補正手段は、次式によって算出した横加速度と前記助変数の横加速度との偏差に応じて、前記助変数の横加速度に対してフィードバック補正を行うことを特徴とする請求項1〜13の何れか一項に記載の横すべり角推定装置。
- 前記変更手段は、前記旋回走行状態が、非旋回領域にあるときには前記第2の補正手段によるフィードバック補正の重みを相対的に増加させ、緩旋回領域にあるときには前記第1の補正手段によるフィードバック補正の重みを相対的に増加させ、前記非旋回領域及び前記緩旋回領域から外れているときには前記補償手段によるフィードバック補償の重みを相対的に増加させることを特徴とする請求項14に記載の横すべり角推定装置。
- 前記加速度検出手段は、車体の前後方向及び左右方向とは夫々異なる2方向への加速度を検出することを特徴とする請求項1〜15の何れか一項に記載の横すべり角推定装置。
- 横すべり角推定装置を備えた自動車において、
前記横すべり角推定装置は、
操舵角、車速、ヨーレート、及び横加速度を走行状態として入力し、前記走行状態を助変数とする積分演算を経て、車体の前後方向と進行方向とでなす横すべり角を推定する推定手段と、異なる2方向への車体の加速度を検出する加速度検出手段と、該加速度検出手段で検出した車体の加速度に応じて、旋回時の車体に作用する遠心力の方向と車体の左右方向とでなす応用横すべり角を算出する算出手段と、前記推定手段で推定した横すべり角と前記算出手段で算出した応用横すべり角との偏差に応じて前記推定手段の積分演算に対するフィードバック補償を行う補償手段と、を備えることを特徴とする自動車。 - 操舵角、車速、ヨーレート、及び横加速度を走行状態として入力し、前記走行状態を助変数とする積分演算を経て車体の前後方向と進行方向とでなす横すべり角を推定すると共に、異なる2方向への車体の加速度に応じて、旋回時の車体に作用する遠心力の方向と車体の左右方向とでなす応用横すべり角を算出し、推定した横すべり角と算出した応用横すべり角との偏差に応じて前記積分演算に対するフィードバック補償を行うことを特徴とする横すべり角推定方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006199450A JP5011866B2 (ja) | 2006-01-23 | 2006-07-21 | 横すべり角推定装置、自動車、及び横すべり角推定方法 |
| EP07100945.0A EP1811308B1 (en) | 2006-01-23 | 2007-01-22 | Apparatus and method for estimating a sideslip angle |
| US11/656,282 US7844383B2 (en) | 2006-01-23 | 2007-01-22 | Sideslip angle estimation apparatus and method and automotive vehicle incorporating the same |
| CN2007100036357A CN101007530B (zh) | 2006-01-23 | 2007-01-23 | 偏离角推定装置、汽车及偏离角推定方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006013676 | 2006-01-23 | ||
| JP2006013676 | 2006-01-23 | ||
| JP2006199450A JP5011866B2 (ja) | 2006-01-23 | 2006-07-21 | 横すべり角推定装置、自動車、及び横すべり角推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007216942A JP2007216942A (ja) | 2007-08-30 |
| JP5011866B2 true JP5011866B2 (ja) | 2012-08-29 |
Family
ID=37964778
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006199450A Expired - Fee Related JP5011866B2 (ja) | 2006-01-23 | 2006-07-21 | 横すべり角推定装置、自動車、及び横すべり角推定方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7844383B2 (ja) |
| EP (1) | EP1811308B1 (ja) |
| JP (1) | JP5011866B2 (ja) |
| CN (1) | CN101007530B (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8090492B2 (en) * | 2006-02-07 | 2012-01-03 | National University Corporation Tokyo University Of Agriculture And Technology | Vehicle motion measurement apparatus, a vehicle abnormal motion prevention apparatus and a drive recorder |
| US7885750B2 (en) * | 2006-08-30 | 2011-02-08 | Ford Global Technologies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine a sideslip angle |
| JP5062010B2 (ja) * | 2008-04-11 | 2012-10-31 | 日本精工株式会社 | 電動パワーステアリング装置 |
| US7657395B2 (en) * | 2008-07-07 | 2010-02-02 | Memsic Inc. | Two-axis accelerometer for detecting inclination without the effect of common acceleration |
| JP5402244B2 (ja) * | 2009-05-26 | 2014-01-29 | トヨタ自動車株式会社 | 車両物理量推定装置 |
| US10102706B2 (en) | 2011-08-23 | 2018-10-16 | Vendrx, Inc. | Beneficial product dispenser |
| US8977390B2 (en) | 2011-08-23 | 2015-03-10 | Vendrx, Inc. | Systems and methods for dispensing beneficial products |
| KR101962890B1 (ko) * | 2012-03-02 | 2019-08-01 | 현대모비스 주식회사 | 차량 센서 오프셋 보정 시스템 및 그 방법 |
| US9878738B2 (en) | 2012-03-28 | 2018-01-30 | Robert Bosch Gmbh | Non-linear compensation controller for active steering system in a vehicle |
| JP6010985B2 (ja) * | 2012-04-06 | 2016-10-19 | 日産自動車株式会社 | 車体制振制御装置 |
| US20160167699A1 (en) * | 2013-07-17 | 2016-06-16 | Hitachi Automotive Systems, Ltd. | Vehicle control apparatus |
| EP3246210B1 (en) * | 2016-05-17 | 2018-12-26 | Volvo Car Corporation | System and method for activation of warning lights of a vehicle |
| KR102621533B1 (ko) * | 2018-11-26 | 2024-01-05 | 현대자동차주식회사 | 차량 조향 시스템의 제어 장치 및 제어 방법 |
| DE102019112900A1 (de) | 2019-05-16 | 2020-11-19 | Wabco Gmbh | Verfahren zur Bestimmung eines Schwimmwinkels während einer Kurvenfahrt eines Kraftwagens, Fahrerassistenzsystem zur Durchführung des Verfahrens sowie Kraftwagen |
| US11702084B2 (en) * | 2019-11-25 | 2023-07-18 | The Goodyear Tire & Rubber Company | Vehicle sideslip angle estimation system and method |
| DE102021100468A1 (de) | 2021-01-13 | 2022-07-14 | Bayerische Motoren Werke Aktiengesellschaft | Bestimmen eines Schwimmwinkels eines Fahrzeugs |
Family Cites Families (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0725320B2 (ja) * | 1986-10-13 | 1995-03-22 | 日産自動車株式会社 | 車両用実舵角制御装置 |
| JPH0750121B2 (ja) * | 1988-04-19 | 1995-05-31 | 日産自動車株式会社 | 車両スリップ角測定装置 |
| JP2844240B2 (ja) * | 1990-03-15 | 1999-01-06 | 本田技研工業株式会社 | 自動走行装置 |
| GB2245873B (en) * | 1990-04-18 | 1994-03-16 | Nissan Motor | Control system for optimizing operation of vehicle performance/safety enhancing systems |
| DE4031304A1 (de) * | 1990-10-04 | 1992-04-09 | Bosch Gmbh Robert | Modellgestuetzte schaetzung des schwimmwinkels |
| JP2817464B2 (ja) * | 1991-09-04 | 1998-10-30 | 日産自動車株式会社 | 車両の後輪舵角制御装置 |
| DE4217710A1 (de) * | 1992-06-01 | 1993-12-02 | Porsche Ag | Verfahren zur Erkennung einer winterglatten Fahrbahn |
| DE4218034B4 (de) * | 1992-06-02 | 2006-05-24 | Dr.Ing.H.C. F. Porsche Ag | Verfahren zur Bestimmung des Kraftschlußpotentials eines Kraftfahrzeuges |
| US5710705A (en) * | 1994-11-25 | 1998-01-20 | Itt Automotive Europe Gmbh | Method for determining an additional yawing moment based on side slip angle velocity |
| US5732377A (en) * | 1994-11-25 | 1998-03-24 | Itt Automotive Europe Gmbh | Process for controlling driving stability with a yaw rate sensor equipped with two lateral acceleration meters |
| DE19515056A1 (de) * | 1994-11-25 | 1996-05-30 | Teves Gmbh Alfred | Bremsanlage |
| JP2993400B2 (ja) * | 1995-06-09 | 1999-12-20 | 三菱自動車工業株式会社 | 車両の旋回制御装置 |
| JP3282449B2 (ja) * | 1995-06-09 | 2002-05-13 | トヨタ自動車株式会社 | 車輌の横滑り状態量検出装置 |
| JP3050092B2 (ja) * | 1995-06-30 | 2000-06-05 | 三菱自動車工業株式会社 | 車両の旋回制御装置 |
| JPH0911876A (ja) * | 1995-06-30 | 1997-01-14 | Mitsubishi Motors Corp | 車両の旋回制御装置 |
| JP3633120B2 (ja) * | 1996-07-18 | 2005-03-30 | 日産自動車株式会社 | 車体速および路面摩擦係数推定装置 |
| JP3169213B2 (ja) * | 1998-02-27 | 2001-05-21 | 株式会社データ・テック | 移動速度検出方法及び装置、車両のすべり角検出装置 |
| JP2000233738A (ja) * | 1999-02-12 | 2000-08-29 | Toyota Central Res & Dev Lab Inc | 車両用走行状態判定装置 |
| JP3650714B2 (ja) * | 2000-02-08 | 2005-05-25 | 光洋精工株式会社 | 車両用操舵装置 |
| WO2001081139A1 (de) * | 2000-04-19 | 2001-11-01 | Continental Teves Ag & Co. Ohg | Verfahren zur online ermittlung von grössen der fahrdynamik für ein kraftfahrzeug |
| JP2001334921A (ja) * | 2000-05-30 | 2001-12-04 | Fuji Heavy Ind Ltd | 車両の路面摩擦係数推定装置 |
| DE10039782A1 (de) * | 2000-08-16 | 2002-02-28 | Daimler Chrysler Ag | Verfahren zur Regelung der Gier-und Querdynamik bei einem Straßenfahrzeug |
| US6904350B2 (en) | 2000-09-25 | 2005-06-07 | Ford Global Technologies, Llc | System for dynamically determining the wheel grounding and wheel lifting conditions and their applications in roll stability control |
| JP3236004B1 (ja) * | 2000-10-31 | 2001-12-04 | 富士重工業株式会社 | 車両の路面摩擦係数推定装置 |
| DE10054647A1 (de) * | 2000-11-03 | 2002-05-08 | Daimler Chrysler Ag | Verfahren zur Regelung der Fahrstabilität |
| JP3539722B2 (ja) * | 2000-11-16 | 2004-07-07 | 富士重工業株式会社 | 車両の路面摩擦係数推定装置 |
| JP2003146199A (ja) * | 2001-11-15 | 2003-05-21 | Honda Motor Co Ltd | 車両状態量の推定方法 |
| US6671595B2 (en) * | 2002-01-08 | 2003-12-30 | Ford Global Technologies, Llc | Vehicle side slip angle estimation using dynamic blending and considering vehicle attitude information |
| JP2003306092A (ja) * | 2002-04-16 | 2003-10-28 | Honda Motor Co Ltd | 車両状態量の推定方法 |
| DE10325485A1 (de) * | 2002-06-11 | 2004-01-08 | Continental Teves Ag & Co. Ohg | Verfahren zum Ermitteln des Schwimmwinkels |
| US6662898B1 (en) * | 2002-10-16 | 2003-12-16 | Ford Global Technologies, Llc | Tire side slip angle control for an automotive vehicle using steering actuators |
| US6840343B2 (en) * | 2002-10-16 | 2005-01-11 | Ford Global Technologies, Llc | Tire side slip angle control for an automotive vehicle using steering peak seeking actuators |
| JP4202872B2 (ja) * | 2003-09-12 | 2008-12-24 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP2005112007A (ja) | 2003-10-02 | 2005-04-28 | Toyoda Mach Works Ltd | 車両の統合制御装置 |
| JP4369198B2 (ja) * | 2003-10-10 | 2009-11-18 | 株式会社ジェイテクト | 車両用操舵制御装置 |
| JP4349309B2 (ja) * | 2004-09-27 | 2009-10-21 | 日産自動車株式会社 | 車両用操舵制御装置 |
| US7590481B2 (en) * | 2005-09-19 | 2009-09-15 | Ford Global Technologies, Llc | Integrated vehicle control system using dynamically determined vehicle conditions |
| US8321088B2 (en) * | 2006-08-30 | 2012-11-27 | Ford Global Technologies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine lateral velocity |
| US7885750B2 (en) * | 2006-08-30 | 2011-02-08 | Ford Global Technologies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine a sideslip angle |
| US7970512B2 (en) * | 2006-08-30 | 2011-06-28 | Ford Global Technologies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system with pitch information |
| US7739014B2 (en) * | 2006-08-30 | 2010-06-15 | Ford Global Technolgies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine a final linear lateral velocity |
| US8712639B2 (en) * | 2006-08-30 | 2014-04-29 | Ford Global Technologies | Integrated control system for stability control of yaw, roll and lateral motion of a driving vehicle using an integrated sensing system to determine longitudinal velocity |
-
2006
- 2006-07-21 JP JP2006199450A patent/JP5011866B2/ja not_active Expired - Fee Related
-
2007
- 2007-01-22 EP EP07100945.0A patent/EP1811308B1/en not_active Expired - Fee Related
- 2007-01-22 US US11/656,282 patent/US7844383B2/en active Active
- 2007-01-23 CN CN2007100036357A patent/CN101007530B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20070173997A1 (en) | 2007-07-26 |
| EP1811308A2 (en) | 2007-07-25 |
| US7844383B2 (en) | 2010-11-30 |
| EP1811308B1 (en) | 2015-12-02 |
| JP2007216942A (ja) | 2007-08-30 |
| CN101007530A (zh) | 2007-08-01 |
| CN101007530B (zh) | 2012-06-13 |
| EP1811308A3 (en) | 2008-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5011866B2 (ja) | 横すべり角推定装置、自動車、及び横すべり角推定方法 | |
| US6904349B2 (en) | Method of estimating quantities that represent state of vehicle | |
| US20060041365A1 (en) | Estimating method for road friction coefficient and vehicle slip angle estimating method | |
| US20080015754A1 (en) | System for estimating and compensating for lateral disturbances using controlled steering and braking | |
| JPH06104455B2 (ja) | 車両運動状態推定装置 | |
| JPH09118212A (ja) | 車体の横滑り速度推定装置 | |
| JP5029442B2 (ja) | 車両姿勢角推定装置及びプログラム | |
| JP4127062B2 (ja) | 横加速度センサのドリフト量推定装置、横加速度センサの出力補正装置及び路面摩擦状態推定装置 | |
| KR20080101738A (ko) | 가가속도 정보를 이용한 차량의 운동 제어장치 | |
| JP3800901B2 (ja) | 車線追従走行制御装置 | |
| US9026334B2 (en) | Vehicle attitude control system | |
| US20010054310A1 (en) | Process for improved determination of the ratio among the radii of the wheels of a vehicle | |
| US7085641B2 (en) | Ackerman angle correction in a steering system for a low speed turn | |
| JP5251177B2 (ja) | 車両走行状態推定装置 | |
| JP4071529B2 (ja) | セルフアライニングトルク推定装置及び横グリップ度推定装置 | |
| JP4887721B2 (ja) | 車両走行状態推定装置 | |
| JP6428497B2 (ja) | 車両制御装置 | |
| US20080167777A1 (en) | Method for Controlling the Steering Orientation of a Vehicle | |
| JP3282449B2 (ja) | 車輌の横滑り状態量検出装置 | |
| JP2014108728A (ja) | 車体横滑り角推定装置 | |
| JP5251176B2 (ja) | 車両走行状態推定装置 | |
| JP4211638B2 (ja) | 車両用パワーステアリング装置及び車両用外乱推定装置 | |
| JP5326562B2 (ja) | 旋回挙動検出装置、旋回挙動検出方法、及びヨーレート推定方法 | |
| KR100892480B1 (ko) | 조향 복원토크 추정 시스템 | |
| JP5375088B2 (ja) | 旋回挙動制御装置、旋回挙動制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090326 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111011 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120508 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120521 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150615 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |