JP4909583B2 - 多軸力ロードセル - Google Patents
多軸力ロードセル Download PDFInfo
- Publication number
- JP4909583B2 JP4909583B2 JP2005363040A JP2005363040A JP4909583B2 JP 4909583 B2 JP4909583 B2 JP 4909583B2 JP 2005363040 A JP2005363040 A JP 2005363040A JP 2005363040 A JP2005363040 A JP 2005363040A JP 4909583 B2 JP4909583 B2 JP 4909583B2
- Authority
- JP
- Japan
- Prior art keywords
- load cell
- load
- spoke
- cylindrical body
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 claims description 8
- 210000004027 cell Anatomy 0.000 description 41
- 238000001514 detection method Methods 0.000 description 7
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 238000000034 method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 210000005056 cell body Anatomy 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images







Description
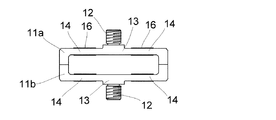
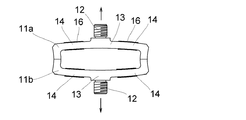
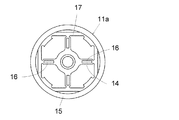
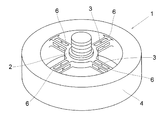
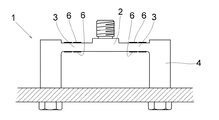
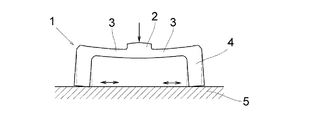
図1は実施例の斜視図、図2は平面図、図3は断面図である。この多軸力ロードセルである6分力ロードセルは、2つのロードセル半部11a、11bが上下対称に組み合わされている。それぞれのロードセル半部11a、11bにおいては、ねじ部12を有する平板状の荷重受部13が4本の十字状に配置したスポーク柱14の内端部により支持され、スポーク柱14の外端部は外周の円筒形の円筒体15に接続されている。
12 ねじ部
13 荷重受部
14 スポーク柱
15 円筒体
16 歪ゲージ
17 フレクシャ
Claims (1)
- 荷重測定に際して弾性変形可能な厚みにした円筒形の保持体内に、断面四角形の4本のスポーク柱の外端部を接続して十字状に配置し、これらのスポーク柱を結合した内端部により荷重受部を支持すると共に、これらのスポーク柱の各側面に歪ゲージを高々1素子ずつ貼付した同形の2つのロードセル半部を、前記保持体の端縁同士を向き合わせて上下対称に配置して前記保持体の端縁同士を接続したことを特徴とする多軸力ロードセル
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005363040A JP4909583B2 (ja) | 2005-12-16 | 2005-12-16 | 多軸力ロードセル |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005363040A JP4909583B2 (ja) | 2005-12-16 | 2005-12-16 | 多軸力ロードセル |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007163405A JP2007163405A (ja) | 2007-06-28 |
| JP2007163405A5 JP2007163405A5 (ja) | 2010-03-25 |
| JP4909583B2 true JP4909583B2 (ja) | 2012-04-04 |
Family
ID=38246462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005363040A Active JP4909583B2 (ja) | 2005-12-16 | 2005-12-16 | 多軸力ロードセル |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4909583B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5459890B1 (ja) * | 2013-09-10 | 2014-04-02 | 株式会社ワコー | 力覚センサ |
| KR101574017B1 (ko) | 2014-05-23 | 2015-12-02 | 명지대학교 산학협력단 | 비선형 스트레인 모델에 기반한 로드셀 구조 |
| JP6354948B2 (ja) | 2014-09-16 | 2018-07-11 | ティアック株式会社 | ロードセル及びロードセルの製造方法 |
| JP2016210561A (ja) * | 2015-05-08 | 2016-12-15 | 日東電工株式会社 | シート部材の搬送方法及び搬送装置 |
| JP6694062B2 (ja) * | 2016-06-08 | 2020-05-13 | 日立オートモティブシステムズ株式会社 | 力センサ |
| US10634695B2 (en) * | 2017-04-26 | 2020-04-28 | Minebea Mitsumi Inc. | Force sensor |
| JP6793103B2 (ja) | 2017-09-29 | 2020-12-02 | ミネベアミツミ株式会社 | ひずみゲージ |
| JP2019066454A (ja) | 2017-09-29 | 2019-04-25 | ミネベアミツミ株式会社 | ひずみゲージ、センサモジュール |
| JP2019184344A (ja) | 2018-04-05 | 2019-10-24 | ミネベアミツミ株式会社 | ひずみゲージ及びその製造方法 |
| JPWO2020085247A1 (ja) * | 2018-10-23 | 2021-09-16 | ミネベアミツミ株式会社 | アクセルペダル、ステアリング、ドア、ドア開閉システム |
| JP6998076B2 (ja) * | 2020-03-02 | 2022-01-18 | 株式会社レプトリノ | 力覚センサ |
| CN116929702B (zh) * | 2023-09-15 | 2023-12-29 | 中国人民解放军32806部队 | 一种飞行器气动特性测试天平装置与测试方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01156632A (ja) * | 1987-12-15 | 1989-06-20 | Kawasaki Steel Corp | 多分力センサ |
| JPH036432A (ja) * | 1989-06-02 | 1991-01-11 | Chinkou Higashijima | 多分力検出器 |
| JPH0676933B2 (ja) * | 1989-08-22 | 1994-09-28 | 株式会社昭和測器 | 多分力・力検出器 |
| JP3459939B2 (ja) * | 1999-03-17 | 2003-10-27 | 関西ティー・エル・オー株式会社 | 力覚センサ |
-
2005
- 2005-12-16 JP JP2005363040A patent/JP4909583B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007163405A (ja) | 2007-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4909583B2 (ja) | 多軸力ロードセル | |
| KR102080426B1 (ko) | 4개 미만의 빔 표면 상에 계측기기를 갖는 힘/토크 센서 | |
| US7441470B2 (en) | Strain gauge type sensor and strain gauge type sensor unit using the same | |
| KR101335432B1 (ko) | 힘토크 센서, 힘토크 센서 프레임 및 힘토크 측정 방법 | |
| JP2909729B2 (ja) | 6分力ロードセル | |
| JP4192084B2 (ja) | 多軸センサ | |
| US20120180575A1 (en) | Capacitance-type force sensor | |
| JP2007010379A (ja) | 力覚センサ | |
| WO2010079660A1 (ja) | 力覚センサ | |
| KR102183179B1 (ko) | 스트레인게이지 방식의 다축 힘토크센서 | |
| JP4877665B2 (ja) | 3軸力覚センサ | |
| JP4249735B2 (ja) | 力センサ | |
| JP3168179U (ja) | 力覚センサおよび6次元力検出装置 | |
| JP5117804B2 (ja) | 6軸力センサ | |
| JP4929257B2 (ja) | 力覚センサ | |
| JPH05149811A (ja) | 6軸力覚センサ | |
| US20050120809A1 (en) | Robotic force sensing device | |
| JP5765648B1 (ja) | 力覚センサ | |
| JP2008096230A5 (ja) | ||
| JP4347165B2 (ja) | 多軸力センサ | |
| EP3295141B1 (en) | Multi axis load cell body | |
| JP2020012660A (ja) | トルクセンサ | |
| JP5273023B2 (ja) | 分力計 | |
| JPH01262431A (ja) | 力覚センサ | |
| Ha et al. | Elastic structure for a multi-axis forcetorque sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081128 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100205 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20100205 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20100301 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100507 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100823 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100902 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20101112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111219 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120116 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150120 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4909583 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |