JP4902575B2 - 道路標示認識装置、および道路標示認識方法 - Google Patents
道路標示認識装置、および道路標示認識方法 Download PDFInfo
- Publication number
- JP4902575B2 JP4902575B2 JP2008046617A JP2008046617A JP4902575B2 JP 4902575 B2 JP4902575 B2 JP 4902575B2 JP 2008046617 A JP2008046617 A JP 2008046617A JP 2008046617 A JP2008046617 A JP 2008046617A JP 4902575 B2 JP4902575 B2 JP 4902575B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- road
- road marking
- information
- template
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Navigation (AREA)
Description
例えば、複数の撮像画像を垂直方向から見下ろす画像に変換して時系列順に接続し、合成画像を生成する画像生成手段と、前記撮像画像に含まれている道路標示の種別を、周辺の連続する組み合わせの道路標示に応じた特徴量の要素を含む周辺情報から識別する道路標示判断手段と、を備え、前記道路標示判断手段は、前記周辺情報に含まれる特徴量の要素と、前記合成画像の特徴量の要素と、の相関値を求め、前記相関値が所定の値以上であった場合に、前記周辺情報から、前記撮像画像に含まれている連続する組み合わせの道路標示の種別を識別することを特徴とする。
<変形例1>
<変形例2>
<変形例3>
Claims (6)
- 複数の撮像画像を垂直方向から見下ろす画像に変換して時系列順に接続し、合成画像を生成する画像生成手段と、
前記撮像画像に含まれている道路標示の種別を、周辺の連続する組み合わせの道路標示に応じた特徴量の要素を含む周辺情報から識別する道路標示判断手段と、を備え、
前記道路標示判断手段は、
前記周辺情報に含まれる特徴量の要素と、前記合成画像の特徴量の要素と、の相関値を求め、前記相関値が所定の値以上であった場合に、前記周辺情報から、前記撮像画像に含まれている連続する組み合わせの道路標示の種別を識別する
ことを特徴とする道路標示認識装置。 - 請求項1に記載の道路標示認識装置であって、
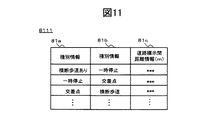
前記周辺情報は、前記連続する組み合わせの道路標示間の距離と、各道路標示の寸法と、に関する情報をさらに含み、
前記周辺情報に格納される道路標示の特徴量の要素を、所定の補正位置において前記道路標示間の距離を伸縮させるよう補正する補正手段、をさらに備えている
ことを特徴とする道路標示認識装置。 - 請求項1または2に記載の道路標示認識装置であって、
さらに、前記識別された道路標示に対する自車両の相対位置を検出する位置検出手段、を備える
ことを特徴とする道路標示認識装置。 - 請求項1から3の何れか一項に記載の道路標示認識装置であって、
前記特徴量の要素は、前記合成画像の各画素の輝度を縦方向と横方向に投影して、取得された縦方向輝度成分と、横方向輝度成分と、である
ことを特徴とする道路標示認識装置。 - 請求項1から4の何れか一項に記載の道路標示認識装置であって、
前記特徴量の要素は、前記合成画像から濃淡が変化している縦方向及び横方向のエッジ成分から取得する、縦方向エッジ成分と、横方向エッジ成分と、である
ことを特徴とする道路標示認識装置。 - 複数の撮像画像を垂直方向から見下ろす画像に変換して時系列順に接続し、合成画像を生成するステップと、
前記合成画像の特徴量の要素を抽出するステップと、
周辺の連続する組み合わせの道路標示に応じた特徴量の要素と、前記合成画像の特徴量の要素と、の相関値を求めるステップと、
前記相関値が所定の値以上であった場合に、前記撮像画像に含まれている連続する組み合わせの道路標示の種別を識別するステップと、を実行する
ことを特徴とする道路標示認識方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008046617A JP4902575B2 (ja) | 2008-02-27 | 2008-02-27 | 道路標示認識装置、および道路標示認識方法 |
| US12/370,073 US20100040289A1 (en) | 2008-02-27 | 2009-02-12 | Load Sign Recognition Apparatus and Load Sign Recognition Method |
| EP09002437A EP2096575A2 (en) | 2008-02-27 | 2009-02-20 | Road sign recognition apparatus and road sign recognition method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008046617A JP4902575B2 (ja) | 2008-02-27 | 2008-02-27 | 道路標示認識装置、および道路標示認識方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009205403A JP2009205403A (ja) | 2009-09-10 |
| JP4902575B2 true JP4902575B2 (ja) | 2012-03-21 |
Family
ID=40677695
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008046617A Expired - Fee Related JP4902575B2 (ja) | 2008-02-27 | 2008-02-27 | 道路標示認識装置、および道路標示認識方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20100040289A1 (ja) |
| EP (1) | EP2096575A2 (ja) |
| JP (1) | JP4902575B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5505729B2 (ja) * | 2011-01-27 | 2014-05-28 | アイシン・エィ・ダブリュ株式会社 | 案内装置、案内方法、および、案内プログラム |
| JP5811666B2 (ja) * | 2011-07-28 | 2015-11-11 | アイシン・エィ・ダブリュ株式会社 | 停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム |
| KR101428239B1 (ko) * | 2012-12-04 | 2014-08-07 | 현대자동차주식회사 | 노면 표식 인식 장치 및 그 인식 방법 |
| KR101393273B1 (ko) | 2012-12-05 | 2014-05-09 | 이엔지정보기술 주식회사 | 노면 텍스쳐 영상 고도화 시스템 |
| EP3533026A4 (en) * | 2016-10-26 | 2021-01-27 | Continental Automotive GmbH | METHOD AND SYSTEM FOR GENERATING A COMPOSITE TOP VIEW IMAGE OF A STREET |
| JP7001985B2 (ja) * | 2016-12-16 | 2022-01-20 | パナソニックIpマネジメント株式会社 | 自車位置推定装置、プログラム、記録媒体、および自車位置推定方法 |
| CN110309833B (zh) * | 2018-03-20 | 2021-03-05 | 国家新闻出版广电总局广播电视规划院 | 一种用于图像标识识别的方法、设备及计算机可读存储介质 |
| JP7179557B2 (ja) * | 2018-09-27 | 2022-11-29 | 日立Astemo株式会社 | 道路標識認識装置 |
| WO2020090428A1 (ja) | 2018-10-30 | 2020-05-07 | 三菱電機株式会社 | 地物検出装置、地物検出方法および地物検出プログラム |
| CN110991320B (zh) * | 2019-11-29 | 2023-09-26 | 阿波罗智能技术(北京)有限公司 | 路况检测方法和装置、电子设备、存储介质 |
| JP7207359B2 (ja) | 2020-04-06 | 2023-01-18 | トヨタ自動車株式会社 | 道路領域補正装置、道路領域補正方法及び道路領域補正用コンピュータプログラム |
| JP7613406B2 (ja) | 2022-04-01 | 2025-01-15 | トヨタ自動車株式会社 | 地物検出装置、地物検出方法及び地物検出用コンピュータプログラム |
| CN114913407B (zh) * | 2022-04-25 | 2025-04-11 | 四川省自贡运输机械集团股份有限公司 | 一种带式输送机巡检机器人定位方法和系统 |
| CN118230592B (zh) * | 2024-05-21 | 2024-08-02 | 招商积余数字科技(深圳)有限公司 | 一种无人值守停车场的停车位管理方法、装置和存储介质 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0827127B1 (en) * | 1996-08-28 | 2006-10-04 | Matsushita Electric Industrial Co., Ltd. | Local positioning apparatus, and method therefor |
| KR100568396B1 (ko) * | 1998-10-08 | 2006-04-05 | 마츠시타 덴끼 산교 가부시키가이샤 | 운전조작 보조장치 |
| US6266442B1 (en) * | 1998-10-23 | 2001-07-24 | Facet Technology Corp. | Method and apparatus for identifying objects depicted in a videostream |
| JP2001101415A (ja) * | 1999-09-29 | 2001-04-13 | Fujitsu Ten Ltd | 画像認識装置および画像処理装置 |
| JP2001134772A (ja) * | 1999-11-04 | 2001-05-18 | Honda Motor Co Ltd | 対象物認識装置 |
| JP4624594B2 (ja) * | 2000-06-28 | 2011-02-02 | パナソニック株式会社 | 物体認識方法および物体認識装置 |
| JP4626054B2 (ja) * | 2000-12-21 | 2011-02-02 | 日産自動車株式会社 | 車両用走行制御装置 |
| JP2003123197A (ja) * | 2001-10-16 | 2003-04-25 | Alpine Electronics Inc | 道路標示等認識装置 |
| US20040086153A1 (en) * | 2002-10-30 | 2004-05-06 | Yichang Tsai | Methods and systems for recognizing road signs in a digital image |
| JP4147470B2 (ja) * | 2003-02-25 | 2008-09-10 | 日本精機株式会社 | 路面表示方法およびその装置 |
| JP4314870B2 (ja) * | 2003-04-22 | 2009-08-19 | 日産自動車株式会社 | 車線検出装置 |
| JP4407920B2 (ja) * | 2004-05-19 | 2010-02-03 | ダイハツ工業株式会社 | 障害物認識方法及び障害物認識装置 |
| JP4519519B2 (ja) * | 2004-05-26 | 2010-08-04 | クラリオン株式会社 | 動物体検出装置 |
| JP4744823B2 (ja) * | 2004-08-05 | 2011-08-10 | 株式会社東芝 | 周辺監視装置および俯瞰画像表示方法 |
| JP4432730B2 (ja) | 2004-11-01 | 2010-03-17 | 日産自動車株式会社 | 車両用道路標示検出装置 |
| JP4557288B2 (ja) * | 2005-01-28 | 2010-10-06 | アイシン・エィ・ダブリュ株式会社 | 画像認識装置及び画像認識方法、並びにそれを用いた位置特定装置、車両制御装置及びナビゲーション装置 |
| KR101235815B1 (ko) * | 2005-04-25 | 2013-02-21 | 가부시키가이샤 지오 기쥬츠켄큐쇼 | 촬영 위치 해석 장치, 촬영 위치 해석 방법, 기록 매체 및 화상 데이터 취득 장치 |
| JP4820712B2 (ja) * | 2005-08-05 | 2011-11-24 | アイシン・エィ・ダブリュ株式会社 | 路面標示認識システム |
| US7804980B2 (en) * | 2005-08-24 | 2010-09-28 | Denso Corporation | Environment recognition device |
| JP4762697B2 (ja) * | 2005-11-29 | 2011-08-31 | アイシン・エィ・ダブリュ株式会社 | 車両走行補助システム |
| JP2007235642A (ja) * | 2006-03-02 | 2007-09-13 | Hitachi Ltd | 障害物検知システム |
| JP4868964B2 (ja) * | 2006-07-13 | 2012-02-01 | 三菱ふそうトラック・バス株式会社 | 走行状態判定装置 |
| JP4654163B2 (ja) * | 2006-07-14 | 2011-03-16 | 日立オートモティブシステムズ株式会社 | 車両の周囲環境認識装置及びシステム |
| JP2008034981A (ja) * | 2006-07-26 | 2008-02-14 | Fujitsu Ten Ltd | 画像認識装置、画像認識方法、歩行者認識装置および車両制御装置 |
| WO2008044911A1 (en) * | 2006-10-09 | 2008-04-17 | Tele Atlas B.V. | Method and apparatus for generating an orthorectified tile |
| JP4309920B2 (ja) * | 2007-01-29 | 2009-08-05 | 株式会社東芝 | 車載用ナビゲーション装置、路面標示識別プログラム及び路面標示識別方法 |
| JP4893945B2 (ja) * | 2007-02-06 | 2012-03-07 | 株式会社デンソー | 車両周辺監視装置 |
| US8422736B2 (en) * | 2007-11-16 | 2013-04-16 | Tomtom Global Content B.V. | Method of and apparatus for producing lane information |
-
2008
- 2008-02-27 JP JP2008046617A patent/JP4902575B2/ja not_active Expired - Fee Related
-
2009
- 2009-02-12 US US12/370,073 patent/US20100040289A1/en not_active Abandoned
- 2009-02-20 EP EP09002437A patent/EP2096575A2/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009205403A (ja) | 2009-09-10 |
| EP2096575A2 (en) | 2009-09-02 |
| US20100040289A1 (en) | 2010-02-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4902575B2 (ja) | 道路標示認識装置、および道路標示認識方法 | |
| JP4831434B2 (ja) | 地物情報収集装置及び地物情報収集プログラム、並びに自車位置認識装置及びナビゲーション装置 | |
| JP4557288B2 (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた位置特定装置、車両制御装置及びナビゲーション装置 | |
| JP4569837B2 (ja) | 地物情報収集装置及び地物情報収集方法 | |
| JP4321821B2 (ja) | 画像認識装置及び画像認識方法 | |
| JP4847090B2 (ja) | 位置測位装置、および位置測位方法 | |
| JP6713368B2 (ja) | 情報処理装置、表示装置、情報処理方法、及びプログラム | |
| US11861841B2 (en) | Lane estimation device, method, and program | |
| JP2006208223A (ja) | 車両位置認識装置及び車両位置認識方法 | |
| JP6615066B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP4953012B2 (ja) | 画像認識装置と画像認識装置のためのプログラム、及びこれを用いたナビゲーション装置とナビゲーション装置のためのプログラム | |
| JP6615065B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP7798590B2 (ja) | 物体追跡装置、物体追跡方法、およびプログラム | |
| JP6647171B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP2008298699A (ja) | 自車位置認識装置及び自車位置認識方法 | |
| JP4953015B2 (ja) | 自車位置認識装置と自車位置認識プログラム、及びこれを用いたナビゲーション装置 | |
| JP4831433B2 (ja) | 自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 | |
| JP4596566B2 (ja) | 自車情報認識装置及び自車情報認識方法 | |
| JP4775658B2 (ja) | 地物認識装置・自車位置認識装置・ナビゲーション装置・地物認識方法 | |
| JP5549468B2 (ja) | 地物位置取得装置、方法およびプログラム | |
| JP4731380B2 (ja) | 自車位置認識装置及び自車位置認識方法 | |
| JP4789868B2 (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた自位置認識装置及びナビゲーション装置 | |
| JP4817019B2 (ja) | 自車位置認識装置及び自車位置認識プログラム | |
| JP2008298698A (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた自位置認識装置及びナビゲーション装置 | |
| JP5088592B2 (ja) | 自車位置認識装置及び自車位置認識プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20100119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110524 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111206 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4902575 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150113 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |