JP4831433B2 - 自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 - Google Patents
自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 Download PDFInfo
- Publication number
- JP4831433B2 JP4831433B2 JP2007337453A JP2007337453A JP4831433B2 JP 4831433 B2 JP4831433 B2 JP 4831433B2 JP 2007337453 A JP2007337453 A JP 2007337453A JP 2007337453 A JP2007337453 A JP 2007337453A JP 4831433 B2 JP4831433 B2 JP 4831433B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- construction
- feature
- vehicle
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000010276 construction Methods 0.000 claims description 705
- 238000012937 correction Methods 0.000 claims description 97
- 238000012545 processing Methods 0.000 claims description 95
- 230000006870 function Effects 0.000 claims description 46
- 238000000034 method Methods 0.000 description 89
- 230000008569 process Effects 0.000 description 60
- 238000003384 imaging method Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000003973 paint Substances 0.000 description 2
- 241000283070 Equus zebra Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000003702 image correction Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
Images








Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
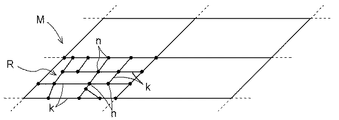
地図データベースDB1は、所定の区画毎に分けられた地図情報Mが記憶されたデータベースである。図3は、地図データベースDB1に記憶されている地図情報Mの構成の例を示す図である。この図に示すように、地図情報Mは、複数のリンクkの接続関係により道路ネットワークを表す道路情報Rを含んでいる。道路ネットワークは、リンクkと、2つのリンクkの接続点にあたるノードnとにより構成される。ノードnは現実の道路における交差点に対応し、リンクkは、各交差点間を結ぶ道路に対応している。各ノードnは、緯度及び経度で表現された地図上の位置(座標)の情報を有している。各リンクkは、リンク属性情報として、道路長、道路種別、道路幅、レーン数、リンク形状を表現するための形状補間点等の情報を有している。ここで、道路種別は、例えば、高速道路、国道、県道、一般道、細街路、導入路等のように、道路を複数の種別に区分した際の道路種別の情報である。ノードnは、ノード属性情報として、通行規制、信号の有無等の情報を有している。なお、図3においては、一つの区画の道路情報Rのみを図示し、他の区画の道路情報Rは省略して示している。
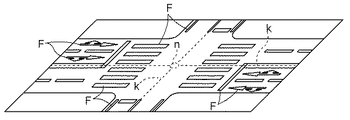
地物データベースDB2は、道路上や道路周辺に設けられた複数の地物の情報、すなわち地物情報Fが記憶されたデータベースである。図1に示すように、本実施形態においては、地物データベースDB2には、初期地物情報Fa及び学習地物情報Fbの2種類の情報が記憶される。ここで、初期地物情報Faとは、地物データベースDB2に予め整備されて記憶されている複数の地物についての地物情報Fである。一方、学習地物情報Fbとは、後述するように、地物画像認識部18による地物の画像認識結果を用いて学習した結果として学習地物情報生成部47により生成され、地物データベースDB2に記憶された地物情報Fである。なお、以下の説明において、単に「地物情報F」というときは、これら初期地物情報Fa及び学習地物情報Fbを総称するものとする。なお、本実施形態においては、初期地物情報Faと学習地物情報Fbとが同じ地物データベースDB2に記憶される構成としているが、これらが別個のデータベースに記憶される構成としてもよい。
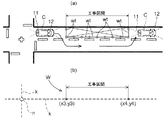
画像情報取得部13は、撮像装置により自車両Cの周辺を撮影した画像情報Gを取得する画像情報取得手段として機能する。ここで、撮像装置は、撮像素子を備えた車載カメラ等であって、少なくとも自車両Cの周辺の少なくとも道路の路面を撮像可能な位置に設けられていると好適である。本実施形態においては、撮像装置として、図2に示すように、自車両Cの後方の路面を撮影するバックカメラ11と、自車両Cの前方の路面及び更にその上方を撮影するフロントカメラ12とを備えている。本例では、バックカメラ11は、フロントカメラ12よりも下方(路面側)を撮影するように設置されている。したがって、バックカメラ11はフロントカメラ12よりも自車両Cの近傍の路面を撮影することができる。画像情報取得部13は、これらのバックカメラ11及びフロントカメラ12により撮影した画像情報Gをフレームメモリ(不図示)等を介して所定の時間間隔で取り込む。この際の画像情報Gの取り込みの時間間隔は、例えば、10〜50ms程度とすることができる。これにより、画像情報取得部13は、バックカメラ11及びフロントカメラ12により撮影した複数フレームの画像情報Gを連続的に取得することができる。ここで取得された画像情報Gは、地物画像認識部18へ出力される。なお、以下の説明において単に画像情報Gというときには、バックカメラ11により撮影した画像情報G及びフロントカメラ12により撮影した画像情報Gの双方を含むものとする。
自車位置情報取得部14は、自車両Cの現在位置を表す自車位置情報Pを取得する自車位置情報取得手段として機能する。ここでは、自車位置情報取得部14は、GPS受信機15、方位センサ16、及び距離センサ17と接続されている。ここで、GPS受信機15は、GPS(Global Positioning System)衛星からのGPS信号を受信する装置である。このGPS信号は、通常1秒おきに受信され、自車位置情報取得部14へ出力される。自車位置情報取得部14では、GPS受信機15で受信されたGPS衛星からの信号を解析し、自車両Cの現在位置(緯度及び経度)、進行方位、移動速度等の情報を取得することができる。方位センサ16は、自車両Cの進行方位又はその進行方位の変化を検出するセンサである。この方位センサ16は、例えば、ジャイロセンサ、地磁気センサ、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム、車輪部に取り付ける角度センサ等により構成される。そして、方位センサ16は、その検出結果を自車位置情報取得部14へ出力する。距離センサ17は、自車両Cの車速や移動距離を検出するセンサである。この距離センサ17は、例えば、車両のドライブシャフトやホイール等が一定量回転する毎にパルス信号を出力する車速パルスセンサ、自車両Cの加速度を検知するヨー・Gセンサ及び検知された加速度を積分する回路等により構成される。そして、距離センサ17は、その検出結果としての車速及び移動距離の情報を自車位置情報取得部14へ出力する。
地物画像認識部18は、画像情報取得部13で取得された画像情報Gに含まれる地物の画像認識処理を行う地物画像認識手段として機能する。本実施形態においては、地物画像認識部18は、後述する自車位置補正部19による自車位置情報Pの補正のための位置補正用画像認識処理と、地物学習手段41による学習地物情報Fbの生成のための地物学習用画像認識処理の2種類の画像認識処理を行う。すなわち、ナビゲーション装置1は、後述するように、工事データベースDB3に記憶された既存の工事情報W及び工事情報取得手段31により新たに取得された工事情報Wに基づいて、自車位置補正部19による自車位置補正処理を行い、或いは地物学習手段による地物学習処理を行う。したがって、地物画像認識部18は、ナビゲーション装置1が自車位置補正処理を行う際には位置補正用画像認識処理を行い、地物学習処理を行う際には地物学習用画像認識処理を行う。なお、本実施形態においては、地物画像認識部18は、フロントカメラ12よりも自車両Cの近傍の路面を撮影できるバックカメラ11により取得した画像情報Gを対象として地物の画像認識処理を行うこととする。なお、フロントカメラ12により取得した画像情報Gを対象として地物の画像認識処理を行うことも当然に可能である。
自車位置補正部19は、地物画像認識部18による地物の画像認識結果と、当該地物についての地物情報Fとを照合して自車位置情報Pを補正する自車位置補正手段として機能する。本実施形態では、自車位置補正部19は、道路情報Rのリンクkに沿った自車両Cの進行方向に自車位置情報Pを補正する。すなわち、自車位置補正部19は、まず、地物画像認識部18の位置補正用画像認識処理による対象地物ftの画像認識結果と、撮像装置としてのバックカメラ11の取付位置、取付角度、及び画角等に基づいて、対象地物ftの画像を含む画像情報Gの取得時における自車両Cと対象地物ftとの位置関係を演算する。例えば、図5に示す状況で画像情報Gが取得された場合、自車位置補正部19は、画像情報Gの画像認識結果に基づいて自車両Cと対象地物ftとしての横断歩道との位置関係(例えば距離d)を演算する。次に、自車位置補正部19は、この自車両Cと対象地物ftとの位置関係の演算結果と、地物データベースDB2から取得した地物情報Fに含まれる対象地物ftの位置情報とに基づいて、自車両Cの進行方向における対象地物ftの位置情報(地物情報F)を基準とする高精度な自車両Cの位置情報を演算して取得する。そして、自車位置補正部19は、このようにして取得した高精度な自車両Cの位置情報に基づいて、自車位置情報取得部14で取得した自車位置情報Pに含まれる、自車両Cの進行方向の現在位置の情報を補正する。その結果、自車位置情報取得部14は、このような補正後の高精度な自車位置情報Pを取得することになる。
ナビゲーション用演算部20は、自車位置表示、出発地から目的地までの経路探索、目的地までの経路案内、目的地検索等のナビゲーション機能を実行するために、アプリケーションプログラム21に従って動作する演算処理手段である。ここで、アプリケーションプログラム21は、自車位置情報P、道路情報Rを含む地図情報M、及び地物情報F等を参照して、ナビゲーション用演算部20に各種のナビゲーション機能を実行させる。例えば、ナビゲーション用演算部20は、自車位置情報Pに基づいて地図データベースDB1から自車両C周辺の地図情報Mを取得して表示入力装置22の表示画面に地図の画像を表示するとともに、当該地図の画像上に、自車位置情報Pに基づいて自車位置マークを重ね合わせて表示する処理を行う。また、ナビゲーション用演算部20は、地図データベースDB1に記憶された地図情報Mに基づいて、所定の出発地から目的地までの経路探索を行う。更に、ナビゲーション用演算部20は、探索された出発地から目的地までの経路と自車位置情報Pとに基づいて、表示入力装置22及び音声出力装置23の一方又は双方を用いて、運転者に対する経路案内を行う。これらのナビゲーション機能の実行に際して、上記のとおり、自車位置補正部19により高精度な自車位置情報Pを取得することができるので、ナビゲーション用演算部20は、より適切な案内を行うことが可能となっている。ここで、表示入力装置22は、液晶表示装置等の表示装置とタッチパネルや操作スイッチ等の入力装置が一体となったものである。音声出力装置23は、スピーカ等を有して構成されている。本実施形態においては、ナビゲーション用演算部20、表示入力装置22、及び音声出力装置23が、本発明における案内情報出力手段24として機能する。
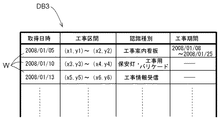
外部情報受信部32は、自車両Cの外部に設置された発信装置から工事情報Wを受信する工事情報受信手段として機能する。本実施形態においては、外部情報受信部32は、VICS(Vehicle Information and Communication System:道路交通情報通信システム)情報を受信する装置で構成される。よって、自車両Cの外部に設置された発信装置としては、例えば、VICSを構成する電波ビーコン発信装置、光ビーコン発信装置、FM多重放送発信装置等が含まれる。既に知られているとおり、VICSから供給される道路交通情報には、自車両Cが走行する道路やその周辺の道路についての工事情報Wが含まれており、この工事情報Wには、当該工事の工事区間の情報も含まれている。そして、外部情報受信部32は、これらの発信装置から工事情報Wを受信した際には、当該工事情報Wを後述する補正停止処理部35へ出力する。また、外部情報受信部32は、受信した工事情報Wを工事データベースDB3に記憶する。この外部情報受信部32で受信した工事情報Wは、図9に示す例では、工事データベースDB3内の3行目に記憶されている。なお、外部情報受信部32は、VICS以外の道路交通情報や工事情報等を受信する装置とすることも可能である。すなわち、外部情報受信部32は、例えば携帯電話網等の各種の無線通信網を利用してナビゲーション装置1等に道路交通情報や工事情報等を配信するシステムからの情報を受信する装置で構成しても好適である。
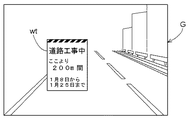
工事画像認識部33は、画像情報取得部13により取得された画像情報Gに含まれる工事シンボルwt(図7参照)の画像認識処理を行う工事画像認識手段として機能する。ここで、工事シンボルwtとは、道路工事が行われている現場に設置される各種の物であり、画像認識が容易な特徴的形態を備える物であると好適である。このような工事シンボルwtとしては、例えば、工事案内看板、工事用フェンス、工事用バリケード、保安灯、コーン、及び工事案内人形(例えば、ガードマンを模した人形)等が含まれ、工事画像認識部33は、これらの少なくとも一つを画像認識処理の対象とする。工事案内看板、工事用フェンス、及び工事用バリケード等は、これらによく用いられる黄と黒の斜線等のような模様や典型的な外形等を特徴量として画像認識処理を行うと好適である。また、保安灯、コーン、及び工事案内人形等は、特徴的な外形を有しているものが多いので、その外形を特徴量として画像認識処理を行うと好適である。本実施形態においては、工事画像認識部33は、バックカメラ11及びフロントカメラ12の双方により取得した画像情報Gを対象として、工事シンボルwtの画像認識処理を行う。
工事情報生成部34は、工事画像認識部33による工事シンボルwtの画像認識結果に基づいて工事情報Wを生成する工事情報生成手段として機能する。工事情報Wは、少なくとも工事区間の情報を含み、場合により工事期間の情報を含む。図9は、工事データベースDB3に記憶された工事情報Wの例を示す図である。この図に示すように、本実施形態においては、工事情報Wは、工事区間及び工事期間の他に、取得日時及び認識種別の情報を含んでいる。ここで、取得日時は、工事情報Wを取得した日時を示し、認識種別は、工事画像認識部33により画像認識した工事シンボルwtの種別を示す。なお、図9に示すように、認識種別は一つに限られず、複数の認識種別の情報が工事情報Wに含まれる場合もある。すなわち、同じ工事区間に複数の工事シンボルwtを画像認識することも多く、その場合には、複数の工事シンボルwtの種別が、認識種別の情報として工事情報Wに含まれることになる。また、図9の例において、認識種別が「工事情報受信」となっているのは、外部情報受信部32により受信した工事情報Wを表している。工事情報生成部34は、工事画像認識部33による工事シンボルwtの画像認識結果に基づいて工事情報Wを生成する。そして、工事情報生成部34は、工事情報Wを生成した際には、当該工事情報Wを後述する補正停止処理部35へ送る。また、工事情報生成部34は、生成した工事情報Wを工事データベースDB3に記憶する。本実施形態においては、この工事データベースDB3が、本発明における工事情報記憶手段に相当する。
補正停止処理部35は、工事情報Wに基づいて工事区間内での自車位置補正部19による自車位置情報Pの補正を停止する補正停止手段として機能する。すなわち、補正停止処理部35は、工事情報取得手段31により工事情報Wを取得した際に、当該工事情報Wに含まれる工事区間の情報と自車位置情報Pとに基づいて、自車位置情報Pに示される自車両Cの位置が工事区間内にある間、自車位置補正部19の処理を停止させる。これにより、道路工事が行われているために通常時と異なる状態の道路の区間を走行する際に、地物データベースDB2に記憶された地物情報Fに示される対象地物ftとは異なる地物を、当該対象地物ftと誤って画像認識し、自車位置情報Pを誤って補正する事態が生じることを抑制できる。また、ここでは、補正停止処理部35は、自車位置補正部19による自車位置情報Pの補正に係る他の処理も停止させる。具体的には、補正停止処理部35は、地物画像認識部18による位置補正用画像認識処理を停止させる。これにより、自車位置情報Pの補正処理のための演算処理負荷をなくすことができるとともに、画像認識処理のための演算処理負荷をなくすことができるので、ナビゲーション装置1の全体での演算処理負荷を軽減することができる。
工事終了判定部36は、工事データベースDB3に既に記憶された工事情報Wに係る工事区間に対応する道路の区間を自車両Cが走行する際に、当該工事情報Wが示す工事の終了を判定する工事終了判定手段として機能する。ここで、工事終了判定部36は、図9に示すような工事データベースDB3に記憶された既存の工事情報Wに含まれる工事区間の情報と、自車位置情報取得部14により取得される自車位置情報Pとに基づいて、当該工事情報Wに係る工事区間に対応する道路の区間を自車両Cが走行するか否かを判定する。本実施形態においては、工事終了判定部36は、自車位置情報Pに示される自車両Cの位置が、工事情報Wに示される工事区間に対応する道路の区間に進入する際に、この判定を行う。そして、工事終了判定部36は、自車両Cが既存の工事情報Wに係る工事区間に対応する道路の区間を走行すると判定した場合に、当該工事情報Wが示す工事が終了しているか否かを判定する。
工事情報消去判定部37は、工事データベースDB3に既に記憶された工事情報Wに係る工事区間に対応する道路の区間を自車両Cが走行しないまま所定期間が経過した際に、当該工事情報Wを工事データベースDB3から消去する工事情報消去手段として機能する。図9に示すように、工事データベースDB3に記憶された工事情報Wは、取得日時の情報を含んでいる。工事情報消去判定部37は、この工事情報Wに含まれる取得日時の情報に基づいて、工事データベースDB3に記憶されてから所定期間が経過するまでの間に、工事終了判定部36による当該工事情報Wの終了判定が行われなかった場合には、当該工事情報Wを工事データベースDB3から消去する。これにより、工事データベースDB3のデータ量が過大になることを抑制できる。ここで、工事情報Wを消去するまでの所定期間は、固定値とすればよく、一般的な道路工事の期間よりも十分に大きい期間に設定すると好適である。
地物学習手段41は、工事終了判定部36により工事の終了が判定された場合に、当該終了したと判定された工事情報Wに係る工事区間において地物画像認識部18に地物の画像認識処理を行わせ、その画像認識結果と自車位置情報Pとに基づいて、画像認識された地物の位置情報及び属性情報を含む学習地物情報Fbを生成する手段である。本実施形態においては、図1に示すように、地物学習手段41は、対象地物決定部42、認識位置情報取得部44及び地物属性情報取得部45を有する認識地物情報生成部43、推測位置判定部46、学習地物情報生成部47、並びに学習データベースDB4を有して構成されている。以下では、この地物学習手段41の各部の構成について説明する。
対象種別決定部42は、地物画像認識部18による地物学習用画像認識処理の対象とする地物種別である対象種別を決定する対象種別決定手段として機能する。ここで、対象種別決定部42は、工事データベースDB3に記憶された既存の工事情報Wに係る工事が終了していることを表す情報を工事終了判定部36から受け取った場合に、当該工事情報Wに係る工事区間に対応する道路の区間を対象として行う地物学習用画像認識処理での対象種別を決定する。本実施形態においては、対象種別決定部42は、一つの工事区間に対して一つの対象種別を決定することとする。この際、対象種別決定部42は、当該工事区間内に存在する可能性が高い地物種別を対象種別として決定する。このような地物種別としては、まず、終了したと判定された工事情報Wに係る工事区間内に、工事前に存在していた地物と同じ地物種別が有力である。そこで、この対象種別決定部42は、第一に、終了したと判定された工事情報Wに係る工事区間内の位置情報を有する地物情報Fを地物データベースDB2から取得し、当該地物情報Fに係る地物と同一の地物種別を対象種別として決定する。これにより、地物画像認識部18が工事区間内において地物学習用画像認識処理を実行する際に、地物データベースDB2に記憶された当該工事区間内の位置情報を有する地物情報Fに係る地物と同一種別の地物を優先的に画像認識させることができる。
認識地物情報生成部43は、地物画像認識部18による地物学習用画像認識処理の画像認識結果を表す認識地物情報Aを生成する認識地物情報生成手段として機能する。ここで、認識地物情報Aは、地物画像認識部18による地物の認識位置を表す認識位置情報sと、当該地物の属性を表す地物属性情報とを含んで構成されている。そこで、この認識地物情報生成部43は、認識地物情報Aに含まれる認識位置情報sを取得するための認識位置情報取得部44と、地物属性情報を取得するための地物属性情報取得部45とを有している。この認識地物情報生成部43は、認識位置情報取得部44により取得した認識位置情報sと、地物属性情報取得部45により取得した地物属性情報とを関連付けて認識地物情報Aを生成する。そして、認識地物情報生成部43は、生成した認識地物情報Aを学習データベースDB4に記憶する。よって、本実施形態においては、この学習データベースDB4が、本発明における認識結果記憶手段に相当する。
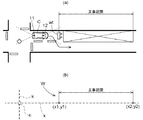
推測位置判定部46は、同じ地物が複数回画像認識されることにより学習データベースDB4に記憶された、同じ地物についての複数の認識位置情報sに基づいて、当該地物の推測位置pgを判定する推測位置判定手段として機能する。本実施形態においては、推測位置判定部46は学習データベースDB4に記憶された同じ地物についての複数の認識位置情報sに基づいて、図10(b)及び(c)に示すように、当該地物についての推測認識位置paを判定し、当該推測認識位置paを当該地物の道路上の位置に変換することにより当該地物の推測位置pgを判定する。具体的には、推測位置判定部46は、まず、同じ地物についての複数の認識位置情報sとしての学習値の分布に基づいて、当該分布の代表値を当該地物についての推測認識位置paとして判定する。ここでは、分布の代表値として最頻値を用いる。すなわち、推測位置判定部46は、各地物についての認識位置情報sとしての学習値が、最初に所定の学習しきい値T以上となった位置範囲を代表する位置を、当該地物についての推測認識位置paと判定する。一例として、図10の例における地物f1の推測認識位置paを判定する場合の判定方法について説明する。図11に示すように、地物f1についての認識地物情報Aとしての学習値は、位置範囲a4において最初に学習しきい値T以上となっている。したがって、推測位置判定部46は、位置範囲a4を代表する位置、例えば位置範囲a4の中央位置pa4を、地物f1の推測認識位置paと判定する。
学習地物情報生成部47は、推測位置判定部46により判定された各地物の推測位置を表す推測位置情報と当該地物の属性を表す地物属性情報とを関連付けて学習地物情報Fbを生成する学習地物情報生成手段として機能する。ここで、学習地物情報Fbは、認識地物情報Aに含まれる地物属性情報と、推測位置判定部46により複数の認識位置情報sを統計的に処理して求めた、当該地物の推測位置pgを表す推測位置情報とを含んで構成される。すなわち、学習地物情報生成部44は、推測位置判定部46により取得された各地物の推測位置pgを表す推測位置情報と、当該地物についての認識地物情報Aに含まれる地物属性情報とを関連付けて学習地物情報Fbを生成する。これにより、学習地物情報Fbは、初期地物情報Faと同様に、地物の位置情報及び属性情報を含む情報として生成される。そして、この学習地物情報生成部44で生成された学習地物情報Fbは、地物データベースDB2に記憶される。本実施形態においては、図10(c)に示すように、学習地物情報Fb1が、地図データベースDB1に記憶された道路情報Rに係るリンクk及びノードnの情報と関連付けられた状態で、地物データベースDB2に記憶されている。なお、この図に表されている黒い四角形「■」は、学習地物情報Fb1の位置情報が示す地物f1の推測位置pgを表している。
次に、本実施形態に係る、自車位置認識装置2及び地物情報収集装置3を含むナビゲーション装置1において実行される自車位置補正・地物学習処理の手順について説明する。図12は、本実施形態に係る自車位置補正・地物学習処理の全体の手順を示すフローチャートである。また、図13は、本実施形態に係る自車位置補正処理の手順を示すフローチャートであり、図14は、本実施形態に係る地物学習処理の手順を示すフローチャートである。以下に説明する処理の手順は、上記の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成する自車位置認識プログラム又は地物情報収集プログラムを実行するコンピュータとして動作する。以下、フローチャートに従って説明する。
(1)上記の実施形態では、補正停止処理部35が、自車位置情報Pに示される自車両Cの位置が工事区間内にある間、自車位置補正部19の処理を停止させる場合を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、少なくとも自車両Cの位置が工事区間内にある間自車位置補正部19の処理を停止させることができればよい。したがって、補正停止処理部35は、工事情報Wに係る工事区間の前後所定距離内においても自車位置補正部19の処理を停止させる構成とすることも可能である。このようにすることにより、工事情報取得手段31により取得される工事情報Wの工事区間の情報の精度が低い場合であっても、工事区間内で確実に自車位置補正部19の処理を停止させることが可能となる。
2:自車位置認識装置
3:地物情報収集装置
13:画像情報取得部(画像情報取得手段)
14:自車位置情報取得部(自車位置情報取得手段)
18:地物画像認識部(地物画像認識手段)
19:自車位置補正部(自車位置補正手段)
21:アプリケーションプログラム
24:案内情報出力手段
31:工事情報取得手段
32:外部情報受信部(工事情報受信手段)
33:工事画像認識部(工事画像認識手段)
34:工事情報生成部(工事情報生成手段)
35:補正停止処理部(補正停止手段)
36:工事終了判定部(工事終了判定手段)
41:地物学習手段
46:推測位置判定部(推測位置判定手段)
47:学習地物情報生成部(学習地物情報生成手段)
DB1:地図データベース
DB2:地物データベース
DB3:工事データベース(工事情報記憶手段)
DB4:学習データベース(認識結果記憶手段)
C:自車両
G:画像情報
P:自車位置情報
M:地図情報
F:地物情報
Fa:初期地物情報
Fb:学習地物情報
W:工事情報
s:認識位置情報
wt:工事シンボル
Claims (17)
- 自車両の現在位置を表す自車位置情報を取得する自車位置情報取得手段と、
自車両の周辺の画像情報を取得する画像情報取得手段と、
前記画像情報に含まれる地物の画像認識処理を行う地物画像認識手段と、
複数の地物の位置情報及び属性情報を含む地物情報を記憶した地物データベースと、
前記地物画像認識手段による地物の画像認識結果と当該地物についての前記地物情報とを照合して前記自車位置情報を補正する自車位置補正手段と、
自車両が走行する道路について工事区間の情報を含む工事情報を取得する工事情報取得手段と、
前記工事情報に基づいて前記工事区間内での前記自車位置補正手段による前記自車位置情報の補正を停止する補正停止手段と、
を備える自車位置認識装置。 - 前記工事情報取得手段は、自車両の外部に設置された発信装置から前記工事情報を受信する工事情報受信手段を含む請求項1に記載の自車位置認識装置。
- 前記工事情報取得手段は、前記画像情報取得手段により取得された前記画像情報に含まれる工事シンボルの画像認識処理を行う工事画像認識手段と、この工事画像認識手段による工事シンボルの画像認識結果に基づいて前記工事情報を生成する工事情報生成手段と、を含む請求項1又は2に記載の自車位置認識装置。
- 前記工事画像認識手段は、前記工事シンボルとして、工事案内看板、工事用フェンス、工事用バリケード、保安灯、コーン、及び工事案内人形の少なくとも一つの画像認識処理を行う請求項3に記載の自車位置認識装置。
- 前記工事情報生成手段は、前記工事シンボルの認識位置を基準とする所定区間を、前記工事情報に含まれる前記工事区間の情報として設定する請求項3又は4に記載の自車位置認識装置。
- 前記工事情報生成手段は、連続する複数フレームの画像情報に工事シンボルが含まれていた場合に、自車両の前方の画像情報に含まれる最初の工事シンボルの認識位置を基準として前記工事区間の始点を設定し、自車両の後方の画像情報に含まれる最後の工事シンボルの認識位置を基準として前記工事区間の終点を設定する請求項5に記載の自車位置認識装置。
- 前記工事情報生成手段は、前記工事画像認識手段により前記工事シンボルとして工事案内看板を画像認識した場合であって、当該工事案内看板の画像認識結果に基づいて工事区間を認識できた場合には、当該工事区間の認識結果に従って前記工事情報に含まれる工事区間の情報を設定する請求項3又は4に記載の自車位置認識装置。
- 前記工事情報取得手段により取得した前記工事情報を記憶する工事情報記憶手段と、
前記工事情報記憶手段に既に記憶された工事情報に係る工事区間に対応する道路の区間を自車両が走行する際に、当該工事情報が示す工事の終了を判定する工事終了判定手段と、
前記工事終了判定手段により工事の終了が判定された場合には、当該工事情報に係る工事区間において前記地物画像認識手段に地物の画像認識処理を行わせ、その画像認識結果と前記自車位置情報とに基づいて、画像認識された地物の位置情報及び属性情報を含む学習地物情報を生成する地物学習手段と、
を更に備える請求項1から7のいずれか一項に記載の自車位置認識装置。 - 前記工事終了判定手段は、前記工事情報記憶手段に既に記憶された工事情報に係る工事区間に対応する道路の区間を自車両が走行する際に、前記工事情報取得手段によって同じ工事区間を含む工事情報を取得しなかった場合に、当該工事情報が示す工事が終了したと判定する請求項8に記載の自車位置認識装置。
- 前記工事情報が工事期間の情報を含む場合には、前記工事終了判定手段は、前記工事情報記憶手段に既に記憶された工事情報に係る工事区間に対応する道路の区間を自車両が走行する際に、当該工事情報に係る工事期間が終了している場合に、当該工事情報が示す工事が終了したと判定する請求項8に記載の自車位置認識装置。
- 前記工事情報記憶手段に既に記憶された工事情報に係る工事区間に対応する道路の区間を自車両が走行しないまま所定期間が経過した際に、当該工事情報を前記工事情報記憶手段から消去する請求項8から10のいずれか一項に記載の自車位置認識装置。
- 前記地物学習手段は、
前記自車位置情報に基づいて求められる、前記地物画像認識手段による地物の認識位置を表す認識位置情報を、当該地物の属性情報と関連付けて記憶する認識結果記憶手段と、
同じ地物が複数回画像認識されることにより前記認識結果記憶手段に記憶された、同じ地物についての複数の前記認識位置情報に基づいて、当該地物の推測位置を判定する推測位置判定手段と、
前記推測位置判定手段により判定された各地物の推測位置を表す位置情報と当該地物の属性情報とを関連付けて学習地物情報を生成する学習地物情報生成手段と、
を備える請求項8から11のいずれか一項に記載の自車位置認識装置。 - 前記地物学習手段は、前記地物画像認識手段に対して、前記工事区間内において前記地物データベースに記憶された当該工事区間内の位置情報を有する地物情報に係る地物と同一種別の地物を優先的に画像認識させる請求項8から12のいずれか一項に記載の自車位置認識装置。
- 前記地物学習手段は、前記地物画像認識手段による地物の画像認識結果と前記工事区間内の位置情報を有する地物情報とを対比し、それらの近似する程度に応じて前記学習地物情報の生成条件を変更する請求項13に記載の自車位置認識装置。
- 前記学習地物情報を、前記地物データベース又はこれとは異なるデータベースに格納する請求項8から14のいずれか一項に記載の自車位置認識装置。
- 請求項1から15のいずれか一項に記載の自車位置認識装置と、地図情報が記憶された地図データベースと、前記地図情報を参照して動作するアプリケーションプログラムと、前記アプリケーションプログラムに従って動作して案内情報を出力する案内情報出力手段と、を備えるナビゲーション装置。
- 自車両の現在位置を表す自車位置情報を取得する自車位置情報取得機能と、
自車両の周辺の画像情報を取得する画像情報取得機能と、
前記画像情報に含まれる地物の画像認識処理を行う地物画像認識機能と、
前記地物画像認識機能による地物の画像認識結果と、地物データベースから取得した当該地物についての位置情報及び属性情報を含む地物情報とを照合して前記自車位置情報を補正する自車位置補正機能と、
自車両が走行する道路について工事区間の情報を含む工事情報を取得する工事情報取得機能と、
前記工事情報に基づいて前記工事区間内での前記自車位置補正機能を停止する補正停止機能と、
をコンピュータに実行させる自車位置認識プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007337453A JP4831433B2 (ja) | 2007-12-27 | 2007-12-27 | 自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007337453A JP4831433B2 (ja) | 2007-12-27 | 2007-12-27 | 自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009156783A JP2009156783A (ja) | 2009-07-16 |
| JP4831433B2 true JP4831433B2 (ja) | 2011-12-07 |
Family
ID=40960949
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007337453A Expired - Fee Related JP4831433B2 (ja) | 2007-12-27 | 2007-12-27 | 自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4831433B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5435294B2 (ja) * | 2010-11-04 | 2014-03-05 | アイシン・エィ・ダブリュ株式会社 | 画像処理装置及び画像処理プログラム |
| US9221461B2 (en) * | 2012-09-05 | 2015-12-29 | Google Inc. | Construction zone detection using a plurality of information sources |
| JP2019135620A (ja) * | 2018-02-05 | 2019-08-15 | アイシン精機株式会社 | 走行支援装置 |
| JP6754386B2 (ja) * | 2018-03-14 | 2020-09-09 | 本田技研工業株式会社 | 車両制御装置 |
| JP2019156192A (ja) | 2018-03-14 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置 |
| JP7669020B2 (ja) * | 2021-02-01 | 2025-04-28 | 株式会社空間技術総合研究所 | 地物データの生成装置及び地物データの生成方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4357386B2 (ja) * | 2004-08-10 | 2009-11-04 | アルパイン株式会社 | 車載用電子装置 |
| JP2006184106A (ja) * | 2004-12-27 | 2006-07-13 | Aisin Aw Co Ltd | 車載用ナビゲーション装置 |
| JP2006292701A (ja) * | 2005-04-15 | 2006-10-26 | Alpine Electronics Inc | 車載装置及び道路状況表示方法 |
| JP4847090B2 (ja) * | 2005-10-14 | 2011-12-28 | クラリオン株式会社 | 位置測位装置、および位置測位方法 |
-
2007
- 2007-12-27 JP JP2007337453A patent/JP4831433B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009156783A (ja) | 2009-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4831434B2 (ja) | 地物情報収集装置及び地物情報収集プログラム、並びに自車位置認識装置及びナビゲーション装置 | |
| JP4703605B2 (ja) | 地物抽出方法、並びにそれを用いた画像認識方法及び地物データベース作成方法 | |
| CN112945251B (zh) | 用于确定车道分配的系统、方法及计算机可读存储介质 | |
| US8213682B2 (en) | Feature information collecting apparatuses, methods, and programs | |
| JP4557288B2 (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた位置特定装置、車両制御装置及びナビゲーション装置 | |
| US7948397B2 (en) | Image recognition apparatuses, methods and programs | |
| JP4984152B2 (ja) | 画像認識システム、サーバ装置、及び画像認識装置 | |
| US20080240506A1 (en) | Feature information management apparatuses, methods, and programs | |
| JP4953012B2 (ja) | 画像認識装置と画像認識装置のためのプログラム、及びこれを用いたナビゲーション装置とナビゲーション装置のためのプログラム | |
| JP2006208223A (ja) | 車両位置認識装置及び車両位置認識方法 | |
| JP2006209510A (ja) | 画像認識装置及び画像認識方法 | |
| JP5141969B2 (ja) | 画像認識装置及び画像認識プログラム、並びにそれを用いた地点情報収集装置及びナビゲーション装置 | |
| JP2009205403A (ja) | 道路標示認識装置、および道路標示認識方法 | |
| JP4831433B2 (ja) | 自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置 | |
| JP2008298699A (ja) | 自車位置認識装置及び自車位置認識方法 | |
| JP4953015B2 (ja) | 自車位置認識装置と自車位置認識プログラム、及びこれを用いたナビゲーション装置 | |
| JP4596566B2 (ja) | 自車情報認識装置及び自車情報認識方法 | |
| JP4775658B2 (ja) | 地物認識装置・自車位置認識装置・ナビゲーション装置・地物認識方法 | |
| JP4817019B2 (ja) | 自車位置認識装置及び自車位置認識プログラム | |
| JP4789868B2 (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた自位置認識装置及びナビゲーション装置 | |
| JP4789869B2 (ja) | 画像認識装置及び画像認識方法、並びにそれを用いた自位置認識装置及びナビゲーション装置 | |
| JP4731380B2 (ja) | 自車位置認識装置及び自車位置認識方法 | |
| JP2007241468A (ja) | 車線変更検出装置 | |
| JP2010071810A (ja) | レーン判定装置及びレーン判定プログラム、並びにそれを用いたナビゲーション装置 | |
| JP2009058430A (ja) | ナビゲーション装置及びナビゲーションプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110818 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110825 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110907 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4831433 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140930 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |