JP4875507B2 - 液滴塗布装置 - Google Patents
液滴塗布装置 Download PDFInfo
- Publication number
- JP4875507B2 JP4875507B2 JP2007028094A JP2007028094A JP4875507B2 JP 4875507 B2 JP4875507 B2 JP 4875507B2 JP 2007028094 A JP2007028094 A JP 2007028094A JP 2007028094 A JP2007028094 A JP 2007028094A JP 4875507 B2 JP4875507 B2 JP 4875507B2
- Authority
- JP
- Japan
- Prior art keywords
- droplet
- application
- coating
- needle
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Description
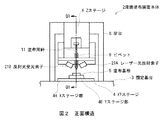
図1において、1は全体として液滴塗布装置を示し、塗布対象としての基板上に液滴を順次塗布することによりマイクロアレーを形成する液滴塗布装置本体2を有する。
塗布用針降下位置検出装置21は、液滴塗布装置本体2の塗布用針11が塗布基板5に対して降下したとき、データ入力部17からのユーザの指示内容に応じて、ユーザが「針接触モード」を選択したとき塗布用針11の針先が塗布基板5の表面に接触したことを検出して液滴塗布動作をさせるような制御を実行すると共に、ユーザが「寸止めモード」を選択したとき塗布用針11の先端が塗布基板5の表面に近接して液滴LQを塗布する位置にまで降下したとき(これを寸止め位置と呼ぶ)これを検出してその降下を止めて液滴塗布動作をさせる(この動作を寸止め動作と呼ぶ)ような制御を実行する。
システム制御ユニット16はデータ入力部17によってユーザが液滴塗布処理指令を入力したとき、図9に示す液滴塗布処理手順RT1を実行する。
図7について上述したように、塗布液を収納する塗布液収納部材としてのピペット9内を塗布用針11を降下させることにより形成した液滴LQを、塗布基板5上に接触させた状態で塗布用針11を寸止めして液滴LQを塗布基板5上に塗布するようにした液滴塗布装置本体2を用いて液滴塗布作業をする際に、液滴LQの大きさ(従って液滴塗布量)は、塗布用針11の降下速度と液滴LQの粘度の選択の仕方によって際立った差があり、これによりユーザは塗布基板5に塗布する液滴の大きさを塗布基板5の用途に従って必要に応じて選択することができる。
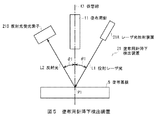
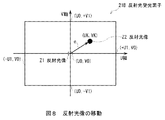
図17は第2の実施の形態を示すもので、図7との対応部分に同一符号を付して示すように、投射レーザ光L21として、塗布用針11の降下仮想線K1上における塗布基板5の光投射点P1に集束するようなレーザ光Lを用い、図17(A)に示すように、塗布用針11が寸止め位置にまで降下する前の状態において、投射レーザ光L21は塗布基板5において反射されて光投射点P1から発散するような反射光L22を形成し、これを反射受光素子21BXに入射させる。
上述の実施の形態においては、液滴LQとして細胞を含んだ資料をマイクロアレー30(図11)上に塗布液滴LQXとして塗布する場合に適用したが、本発明はこれに限らず、タンパク質又はDNAをマイクロアレー上に分注したり、液晶パネルについて、断線した箇所に導電樹脂を塗布することにより修復作業をしたり、基板上に接着剤や半田ペーストなどの微小液滴を塗布したりするような場合に広く適用し得る。
Claims (2)
- 塗布液を収納する塗布液収納部材を通って塗布用針を降下させることにより塗布対象に液滴を塗布する液塗布装置本体を有する液滴塗布装置において、
上記塗布液収納部材から降下して先端に液滴を形成した上記塗布用針が、上記液滴が上記塗布対象に接触する寸止め位置に降下したことを検出する針降下検出手段と、
上記液滴を上記塗布対象に塗布すると共に上記針降下検出手段の検出出力によって上記塗布用針の降下動作を停止させる寸止め手段と
を具え、
上記針降下検出手段は、上記塗布用針が上記寸止め位置に降下したとき、上記塗布用針の先端部と共に、当該先端部の先端に生成された液滴に投射レーザ光を投射し、上記液滴を屈折しながら透過して上記塗布対象によって反射して上記液滴から射出する反射光の投射位置に応じた上記検出出力を得る
ことを特徴とする液滴塗布装置。 - さらに、上記塗布用針の降下速度と上記塗布液の粘度を選定することにより液滴量が異なる複数の液滴を選択的に形成できる液滴量選択手段を具える
ことを特徴とする請求項1に記載の液滴塗布装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007028094A JP4875507B2 (ja) | 2007-02-07 | 2007-02-07 | 液滴塗布装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007028094A JP4875507B2 (ja) | 2007-02-07 | 2007-02-07 | 液滴塗布装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008191091A JP2008191091A (ja) | 2008-08-21 |
| JP4875507B2 true JP4875507B2 (ja) | 2012-02-15 |
Family
ID=39751316
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007028094A Expired - Fee Related JP4875507B2 (ja) | 2007-02-07 | 2007-02-07 | 液滴塗布装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4875507B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5210902B2 (ja) * | 2009-01-30 | 2013-06-12 | 株式会社日立ハイテクノロジーズ | 自動分析装置及び自動分析装置を用いた分析方法 |
| WO2014012100A1 (en) | 2012-07-13 | 2014-01-16 | Constitution Medical, Inc. | Controlled dispensing of samples onto substrates |
| KR101528760B1 (ko) * | 2014-03-28 | 2015-06-16 | 최규동 | 약물의 프리밍 상태를 감지하는 방법 및 이를 적용한 주입 장치 |
| JP6749814B2 (ja) * | 2015-11-12 | 2020-09-02 | Ntn株式会社 | 高さ検出装置およびそれを搭載した塗布装置 |
| EP3376156B1 (en) * | 2015-11-12 | 2022-03-02 | NTN Corporation | Height detection apparatus and coating apparatus equipped with the same |
| JP6333323B2 (ja) | 2016-08-29 | 2018-05-30 | Ntn株式会社 | 塗布装置および塗布方法 |
| WO2020022449A1 (ja) * | 2018-07-26 | 2020-01-30 | Ntn株式会社 | 塗布針ホルダ、塗布部材、塗布装置および塗布方法 |
| JP7050611B2 (ja) * | 2018-07-26 | 2022-04-08 | Ntn株式会社 | 塗布部材、塗布装置および塗布方法 |
| JP7397435B2 (ja) * | 2019-09-12 | 2023-12-13 | 国立大学法人大阪大学 | 塗布装置 |
| US20220371043A1 (en) * | 2019-09-12 | 2022-11-24 | Osaka University | Application apparatus and application method |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3164304A (en) * | 1961-05-08 | 1965-01-05 | Standard Thomson Corp | Liquid dispensing apparatus for small quantities |
| JPH03120407A (ja) * | 1989-10-03 | 1991-05-22 | Fujitsu Ltd | プリント基板上の流体滴下状態の検査装置 |
| US5551487A (en) * | 1995-03-10 | 1996-09-03 | Hewlett-Packard Company | Micro-dispenser for preparing assay plates |
| JPH09145604A (ja) * | 1995-11-27 | 1997-06-06 | Tokai Rika Co Ltd | 液体付着検出装置 |
| US6269846B1 (en) * | 1998-01-13 | 2001-08-07 | Genetic Microsystems, Inc. | Depositing fluid specimens on substrates, resulting ordered arrays, techniques for deposition of arrays |
| EP1002570A1 (en) * | 1998-11-20 | 2000-05-24 | Corning Incorporated | Capillary transfer device for high density arrays |
| US6296702B1 (en) * | 1999-03-15 | 2001-10-02 | Pe Corporation (Ny) | Apparatus and method for spotting a substrate |
| JP4365947B2 (ja) * | 1999-08-09 | 2009-11-18 | Thk株式会社 | マイクロアレイ作製装置 |
| JP4522012B2 (ja) * | 2001-03-26 | 2010-08-11 | キヤノン株式会社 | プローブ担体の製造装置および製造方法 |
| CA2442978A1 (en) * | 2001-04-04 | 2002-10-17 | Bioprocessors Corp. | System and method for dispensing liquids |
| JP2002323509A (ja) * | 2001-04-26 | 2002-11-08 | Thk Co Ltd | マイクロアレイ作製用ヘッド、このヘッドを用いたマイクロアレイ作製装置、マイクロアレイ作製方法、及びマイクロアレイ |
| JP2003172744A (ja) * | 2001-12-07 | 2003-06-20 | Mitsubishi Heavy Ind Ltd | 非接触型微量液滴下方法及び装置 |
| US6832733B2 (en) * | 2003-01-16 | 2004-12-21 | Harold J. Engel | Nozzle end configuration |
| WO2006022217A1 (ja) * | 2004-08-23 | 2006-03-02 | Kabushiki Kaisha Ishiihyoki | インクジェットプリンタの吐出量制御方法、及びインク滴広がり検査方法、並びに配向膜形成方法。 |
-
2007
- 2007-02-07 JP JP2007028094A patent/JP4875507B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008191091A (ja) | 2008-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4875507B2 (ja) | 液滴塗布装置 | |
| US11402195B2 (en) | Height detection apparatus and coating apparatus equipped with the same | |
| EP1985991B1 (en) | Measuring probe, sample surface measuring apparatus and sample surface measuring method | |
| US20100258544A1 (en) | Mold removing method | |
| EP4307038A1 (en) | Printing method and apparatus for reflecting layer of backlight plate | |
| CN113547205A (zh) | 一种激光刻蚀装置、方法及系统 | |
| KR20190003983A (ko) | 광학 접합을 위한 자동 접합 시퀀스의 결정 | |
| CN1194592C (zh) | 在利用丝网印刷工艺将焊膏涂敷到印刷电路板上时产生测试图形的方法和设备 | |
| JP6083026B2 (ja) | ヘッドモジュール、吐出装置、吐出システムおよび吐出システムにより吐出する方法 | |
| US7820994B2 (en) | System to test electronic part and method of controlling the same | |
| JP2005138013A (ja) | 液滴吐出装置の制御方法及び液滴吐出装置 | |
| JP2007054727A (ja) | 塗布状態の検出方法及び検出装置 | |
| CN108693624A (zh) | 成像方法、装置及系统 | |
| CN106406572A (zh) | 光标的控制方法和装置 | |
| US10288638B2 (en) | Non-contact systems and methods to locate sharp tips | |
| JP2002066771A (ja) | レーザ装置 | |
| US20210362340A1 (en) | Device and method for calibrating a robotic cell | |
| JP2003194522A (ja) | プリント基板穴位置穴径検査機 | |
| JP3282008B2 (ja) | ペースト塗布方法 | |
| EP2921306A2 (en) | Load estimation apparatus, laser light irradiation system, and load estimation method | |
| JP3328190B2 (ja) | 検査体位置決め装置および検査体位置決め方法 | |
| WO2019146547A1 (ja) | ペリクルフレーム把持装置及びペリクルフレーム把持方法 | |
| US4839525A (en) | Method of and apparatus for measuring coordinates of edges of tape | |
| WO2022085051A1 (ja) | 測定装置、測定方法及びボンディングシステム | |
| CN117858366A (zh) | 一种精密线路缺陷修复方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110913 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111101 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111125 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |