JP4807632B2 - 検出センサ - Google Patents
検出センサ Download PDFInfo
- Publication number
- JP4807632B2 JP4807632B2 JP2007046199A JP2007046199A JP4807632B2 JP 4807632 B2 JP4807632 B2 JP 4807632B2 JP 2007046199 A JP2007046199 A JP 2007046199A JP 2007046199 A JP2007046199 A JP 2007046199A JP 4807632 B2 JP4807632 B2 JP 4807632B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- platform
- vibration
- mode
- detection sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 54
- 239000000463 material Substances 0.000 claims description 40
- 239000000126 substance Substances 0.000 claims description 37
- 238000006073 displacement reaction Methods 0.000 claims description 24
- 230000008859 change Effects 0.000 claims description 13
- 230000035945 sensitivity Effects 0.000 description 23
- 238000000034 method Methods 0.000 description 12
- 239000004065 semiconductor Substances 0.000 description 10
- 230000008878 coupling Effects 0.000 description 9
- 238000010168 coupling process Methods 0.000 description 9
- 238000005859 coupling reaction Methods 0.000 description 9
- 239000013078 crystal Substances 0.000 description 9
- 238000011160 research Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 8
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 7
- 150000001875 compounds Chemical class 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 238000000105 evaporative light scattering detection Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 108090000623 proteins and genes Proteins 0.000 description 3
- RTZKZFJDLAIYFH-UHFFFAOYSA-N Diethyl ether Chemical compound CCOCC RTZKZFJDLAIYFH-UHFFFAOYSA-N 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000005284 excitation Effects 0.000 description 2
- 238000007667 floating Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 102000004169 proteins and genes Human genes 0.000 description 2
- 238000001179 sorption measurement Methods 0.000 description 2
- 102000004190 Enzymes Human genes 0.000 description 1
- 108090000790 Enzymes Proteins 0.000 description 1
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 239000000232 Lipid Bilayer Substances 0.000 description 1
- 241000700605 Viruses Species 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 239000000427 antigen Substances 0.000 description 1
- 102000036639 antigens Human genes 0.000 description 1
- 108091007433 antigens Proteins 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000012620 biological material Substances 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000002121 nanofiber Substances 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 239000002210 silicon-based material Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G3/00—Weighing apparatus characterised by the use of elastically-deformable members, e.g. spring balances
- G01G3/12—Weighing apparatus characterised by the use of elastically-deformable members, e.g. spring balances wherein the weighing element is in the form of a solid body stressed by pressure or tension during weighing
- G01G3/16—Weighing apparatus characterised by the use of elastically-deformable members, e.g. spring balances wherein the weighing element is in the form of a solid body stressed by pressure or tension during weighing measuring variations of frequency of oscillations of the body
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N5/00—Analysing materials by weighing, e.g. weighing small particles separated from a gas or liquid
- G01N5/02—Analysing materials by weighing, e.g. weighing small particles separated from a gas or liquid by absorbing or adsorbing components of a material and determining change of weight of the adsorbent, e.g. determining moisture content
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
- Gyroscopes (AREA)
Description
機械的振動子の周波数変化等によって物質の量を検出する装置は、QCM(Quarts Crystal Micro balance: 水晶天秤)センサとして良く知られている。これは、水晶振動子に物質が付着すると、付着したその質量に応じて振動周波数が変動する(下がる)性質を利用したもので、微小な質量を計測する質量センサとして優れた性能を有しており、さらに膜厚計(蒸着モニタ)としてもよく用いられている。
このような振動子、特にMEMS技術を用いた微小な機械的振動子は、その大きさが大幅に小さくなったことにより、振動子の周波数がGHzレベルにまで高くなり、しかもSiを材料とすることができるため、半導体回路との一体化を目指した研究に発展しつつある。
本発明は、上記のような技術的課題のうち、振動子のさらなる高感度化を図ることのできる技術を提供することを目的とする。
このような振動子は、特定の共振モードで振動する。このため振動子の表面では振幅の大きな領域や殆ど振動しない領域が生じ、しかもその領域が共振モードによって異なることから、振動子の表面のどこに検出すべき物質が付着するかによって検出感度が異なってしまう問題がある。これにともない、振動子の表面に一様に物質が付着または吸着したとしても、感度には部位によるばらつきがあるために、ここに感度向上の余地があるのではないか、と本発明者らは考えた。
このような振動子において感度向上を図る一つの手段とは、感度の高い(振幅の大きい)部位に、物質を集中的・選択的に付着または吸着させるというものであり、これについては本出願人が既に提案を行っている(特願2006−4197)。
また、振動子が部位によって振幅が異なる特性を利用し、振動の少ない部位で振動子を支持することで、振動子の振動を妨げることによるロスを抑制して、高感度化を図るという手法も本出願人が既に提案をなしている(特願2006−73742)。
すなわち、本発明の検出センサは、ディスク状の振動子と、振動子に機械的に結合され、質量を有した物質が付着または吸着するプラットフォームと、振動子を振動させる駆動部と、振動子における振動の変化を検出することで、物質を検出する検出部と、を備えることを特徴とする。
また、プラットフォームの共振周波数を振動子よりも高いものとすることで、プラットフォームは振動子によって励振されず、プラットフォームは、振動子の振動の影響を受けることがない。
また、プラットフォームは、振動子において、振幅が最大となる部位またはその近傍に結合するのが好ましい。これにより、プラットフォームからを介して振動子に伝達されるプラットフォーム上の物質の質量の影響を、より高感度に検出することが可能となる。
また、振動子の振動によって、プラットフォームが励振されてしまうと、これが振動子側にも影響を及ぼし、検出感度が低下する可能性がある。そこで、本発明においては、振動子によるプラットフォームの励振を避けるには、プラットフォームの共振周波数を、振動子の共振周波数よりも高くなるように形成する。
振動子を評価するパラメータであるQ値は、振動子が振動エネルギを失わずにいられるかによってきまり、式(1)のような関係で表すことができる。

1)空気など周囲の媒質による損失Qair、
2)振動子が振動し変形することによって生じる損失QTED、
3)振動子の保持機構による損失Qanchor Loss、
およびその他の損失Qothersが考えられている。
1)のQairを決める空気を代表とする周囲の媒質へのエネルギ損失を少なくするためは、振動子の振動を制御して、振動子の振動エネルギは大きいが周囲の媒質へのエネルギ移動が少ない振動モードを選ぶことで対処している。例えばディスク状機械的振動子は振動子のディスク面内方向にだけ振動し(円柱座標で言えばr、θ方向だけの振動で、Z方向には振動しない)、太鼓の膜のように(Z方向に)振動して大きな振動エネルギを周囲の媒質に移動することが少ない。
また2)のQTEDは、振動子が振動することで変形し、この変形により断熱膨張や断熱圧縮が起こる。このため断熱膨張領域は冷え、逆に断熱圧縮する領域は熱くなり、振動子に温度傾斜が生まれて、その温度が伝導して平均化することでエネルギが失われると言われている。すなわちこのエネルギ損失は振動子の振動モードと振動子の材質によって決まるものと言える。
さて3)のQanchor lossは振動子の保持部による損失で、保持部に振動子の振動が伝わることによって生ずる。例えば振動子が振動しない所に保持部を設けることによってエネルギ損失を無くすことが可能になると考えられるが、通常の円盤状のディスク状振動子では、最も一般的な振動子材料であるSi単結晶を用いる限り、この様な条件を見いだすには至っていない。
しかしこの(2、1)モードはCompoundモードであり、Tangential方向にも振動成分があるため、このTangential方向の振動においてもr成分はr=0を除く全てのrに対して有限の値を持ち、それが円周方向ではsin2θに従って変化している。このためU(r、θ)が0、すなわちcos2θが0になるθ=π/4、3π/4、−3π/4、−π/4の各角度において、V(r、θ)はsin2θが1、−1、1、−1となるため、逆に振幅が最大になってしまう。すなわちWine−Glassモード(2、1)で振動する円形振動子には、Radial成分とTangential成分の振動の双方が0となる部位は存在しない。
このようにしてなされた見出した手法においては、振動子を、中央部に開口部が形成されたリング状とし、その外径をRa、内径をRbとする。この振動子が振動したときの位置座標(r、θ)における位置rでの変位は、式(3)に示すように、Radial方向の変位がU(r)、Tangential方向の変位がV(r)によって表されるので、r=RaまたはRbとしたときにU(r)=0またはV(r)=0をほぼ満足する外径Raと内径Rbで、振動子を形成するのである。
そして、式(3)においてr=RaであるときにU(r)=0またはV(r)=0をほぼ満足する場合、振動子は、外径部分に、振動の生じない部位が存在する。また、式(3)においてr=RbであるときにU(r)=0またはV(r)=0をほぼ満足する場合は、振動子は、内径部分に、振動の生じない部位が存在する。
さらに、式(3)においてr=RaまたはRbであるときにU(r)=0をほぼ満足する場合、振動子は、sin(nθ)=0となる位置θに、振動の生じない部位が存在する。また、式(3)においてr=RaまたはRbであるときにV(r)=0をほぼ満足する場合、振動子は、cos(nθ)=0となる位置θに、振動の生じない部位が存在する。
このようにして、振動子における、Radial成分とTangential成分の振動を共に無くすことができる。
この場合、振動子は、外径をRaとし、開口部の内径をRbとしたときに、Rb/Raを0.65〜0.81とすることができる。これにより、大きな開口部を形成することができ、ここにプラットフォームを設けることで、大きな面積のプラットフォームを有した検出センサを構成できる。
また、プラットフォームを、振動子における、(2、1)モードの振動を抑圧する位置にて振動子の開口部に結合すれば、プラットフォームによって、振動子の(2、1)モードの振動を抑制することができる。
また、小型で安定な高感度な家庭用や個人用のガスセンサや、携帯性に優れる使い捨て型で空気中などに浮遊する有害物質の検出等の用途にも、本発明の検出センサや振動子を用いることも考えられる。更に高感度化が進めばその応用範囲はさらに広がり、「におい」の検出識別が可能となるまで発展することが可能であり、さらにこれ以外の用途に対しても、本発明の検出センサの利用を妨げるものではない。
しかも本発明の検出センサは、いわゆるSi単結晶を構造材料として用いることで、MEMS技術により製造することができることから、Si半導体と同一チップ内への作り込むことも可能となる。その場合、極めて安価でしかも高性能な微小物質の検出装置とすることができる。
図1は、本実施の形態におけるセンサ(検出センサ)10の基本的な構成を説明するための図である。
この図1に示すセンサ10は、ディスク状で、全体として円形、矩形、あるいは適宜他の形状を有し、質量を有した分子等の検出対象物が付着すると振動周波数が変化する振動子20と、ディスク状の振動子20を振動させるための駆動源30と、振動子20における振動特性の変化を検出する検出部40と、を備えている。
また、検出部40も、静電効果やピエゾ効果により、振動子20における振動を検出し、電気信号として出力するようになっている。このとき、振動子20に質量を有した物質が付着すると、その質量の影響を受けて振動子20の振動数が変化する。検出部40では、検出部40から出力される電気的な振動をモニタリングすることで、振動子20への物質の付着の有無、あるいは振動子20への物質の付着量を検出することが可能となっている。
ここで、振動子20の外径をRa、開口部21の径をRbとすると、振動子20は、Rb/Raが以下のような条件をほぼ満足するように、振動子20の外径Ra、開口部21の径(振動子20の内径)Rbを設定するのが好ましい。
振動子20におけるCompoundモードにおける共振周波数の決定式は、以下の式(4)のようになる。
また全てがA5に対して比例関係にあるためA5=1としてもモード関数に本質的に変化は無いことから、改めてA5=1として、各モードにおけるRadial方向のr成分をU(r)、Tangential方向のr成分をV(r)として表せば、式(6)のモード関数は、次式(10)となる。
例えば振動子20の外径RaにおいてU(Ra)=0になる場合には、振動子20の外径部分での振動がなくなる。したがって、振動子20を、支持部材22によってその外径部分で支持する。
このとき、V(Ra)≠0であっても、式(10)に示すようにTangential方向の変位は、これにsin(nθ)をかけたものであるから、sin(nθ)=0となる位置においては、式(10)のV(r、θ)では振動が生じない。n=1の振動モードの場合、V(Ra、0)、V(Ra、π)の位置で、支持部材22によって振動子20を保持すれば、振動子20の振動エネルギは支持部材22を通して失われることは無い。
逆にV(Ra)=0の場合には、U(Ra)≠0であってもRadial方向の変位はこれにcos(nθ)をかけたものであるからcos(nθ)=0となる位置で、振動子20を保持すれば良いことになる。
なお、ここでは穴あきのディスク状の振動子20の外径部分における保持方法を述べたが、これが内径部分で保持する場合であっても同様の考え方でその位置を決めることができる。
なお図2〜図4では、各モードにおいて最低次の共振周波数(m=1)から4番目の共振周波数(m=4)まで示し、これを通常のモード表現に従い(n、m)と表示している。
例えば図2(b)に示す(1、2)モードでは、V(Ra)がRb/Ra=0.17において0になっていることが示されている。従ってポアソン比0.28の材料(例えば、単結晶Si)を用い、(1、2)モードで用いる振動子20を設計するには、内径Rbと外径Raの比を0.17に選び、cosθ=0の角度、すなわちθ=±π/2の位置の内径部分で振動子20を保持するように設計すれば、振動子20の共振振動になんら影響を与えず振動子20を保持することが可能である。
k=h(2/(1−σ))1/2
という関係があり、hとkを変数として見ると、この二つの変数がポアソン比σでのみ関係付けられていることによる。
プラットフォーム50を振動子20と一体的に挙動させるには、振動子20において、r方向またはθ方向のいずれか一方のみに振動が生じる部位に、ブリッジ51を介してプラットフォーム50を機械的に結合するのが好ましい。
このとき、ブリッジ51は、1箇所以上設けるが、2箇所以上設けても良い。この場合、プラットフォーム50に不要な歪を生じさせない、すなわちプラットフォーム50の付加によって不要な損失を振動子20に与えないためには、ブリッジ51を設ける箇所における振動子20の振幅が等しいのが好ましい。このため、振動子20の中心に対し、線対称または点対称となる2箇所以上に設けるのが良い。
これにより、振動子20の振動モード、ブリッジ51による接続箇所により、プラットフォーム50を、振動子20と一体的にr方向またはθ方向に挙動させることができる。
また、プラットフォーム50を振動子20にブリッジ51を介して接続する部位は、振動子20においてその振動振幅がなるべく大きな部位とするのが好ましい。これにより、プラットフォーム50、ブリッジ51を介して振動子20に伝達されるプラットフォーム50上の物質の質量の影響を、より高感度に検出することが可能となる。
プラットフォーム50、ブリッジ51は、いかなる材料で形成しても良いが、製造の容易性を考慮すると、振動子20と同材料で形成するのが好ましい。その場合、例えば振動子20、プラットフォーム50、ブリッジ51を、フォトリソグラフィ法等の半導体加工技術によって、同一層に形成するのが好ましい。もちろん、振動子20に対し、プラットフォーム50、ブリッジ51を立体的に形成するような構成を本発明は排除するものではない。
プラットフォーム50と振動子20を同一材料で形成する場合、プラットフォーム50の共振周波数を振動子20の共振周波数よりも高くするには、プラットフォーム50の外形寸法を、振動子20の開口部21の内径Rbよりも小さくすればよい。しかし、プラットフォーム50上になるべく多くの物質を付着または吸着させるには、プラットフォーム50をなるべく大きく形成するのが好ましい。
[第1の例]
振動子20の材料をSiとし、例えばn=1、m=2、すなわち(1、2)モードを選び、φ=Rb/Ra=0.165の場合について式(11)を計算した結果が図9である。図10は、そのモード姿態であり、振動子20上における振動振幅の大きさを10段階に区分して示しており、S0で示す部分が振幅最小(ゼロ)、S9で示す部分が振幅最大である。
式(10)のUn(r、θ)とVn(r、θ)は、それぞれr方向とθ方向の変位を示し、この計算例において、r/Ra=1すなわちr=Raの時には、V1(Ra)=0となることから、振動子20の外径部分においてθ方向の変位はいかなるθでも0であることを示している。またr方向のモード関数U1(r、θ)がθ=π/2またはθ=3π/2においてcosθ=0になることから、この位置ではr方向の変位も0になる。
すなわちφ=0.165の振動子20の外径部分において、角度θ=π/2またはθ=3π/2の位置では全く振動が無い。従ってこの位置で振動子20を保持すれば、振動エネルギが保持部を通して失われない。
この場合、プラットフォーム50は、振動子20の振動成分のうちのθ成分によって、水平方向に振動させられる状態になっており、この状態は、プラットフォーム50はnが奇数のモードで励振されている状態でもある。すなわち、プラットフォーム50がn=1、3、5・・などの奇数モードの共振条件を満たす大きさになっている場合には、プラットフォーム50にはモードに伴う振動振幅の分布が現れてセンサ10として使うには不都合な状態になる。一方、プラットフォーム50が小さく共振条件を満たさない場合には、プラットフォーム50は完全な剛体と見なすことができ、プラットフォーム50は一様に水平方向に振動することになる。この状態において、プラットフォーム50は大きな振幅の水平方向の一様な振動をしていることからセンサ10として使うに都合が良い状態になっている。
次にn=2の場合の実施例を示す。振動子20に振動モードとして(2、3)モードを選び、φ=0.41として式(11)を計算した結果が図11である。
図11から判るようにr/Ra=1のとき、V2(Ra)=0であることから、振動子20の外径部分では、θ方向の変位が常に0になる。さらにr方向のモード関数であるU2(r、θ)は、θ=π/4、θ=3π/4、θ=5π/4、θ=7π/4の各角度においてcos2θ=0になることから、この角度でr方向の変位も0になる。すなわちφ=0.410の振動子20では、外径部分において角度θ=π/4、θ=3π/4、θ=5π/4、θ=7π/4の位置では全く振動がない。すなわちこの位置で振動子20を保持すれば、振動エネルギが保持部を通して失われることは無い。この例のモード姿態を図12に示す。
このことを一般化して言えば、n次の振動モードでは、同じ角度方向の振動はθ=0〜2πにおいてsin(nθ)で決まることから、θ方向のみに大きな振動が生じる部位はn箇所となる。従って、穴あき型含む振動子20とプラットフォーム50のブリッジ51による機械的結合を行うのに適した箇所はn個もしくはそれ以下となる。
ここまで示したn=2の例のように、nが偶数のモードにおいて、中心に対して点対称な2箇所で振動子20とプラットフォーム50を機械的に結合した場合、プラットフォーム50が偶数次モードもしくはPure Tangential Modeの振動条件を満たさないときには、mの値に関わらず、プラットフォーム50は必ず一様な回転振動をする。これに対し、プラットフォーム50が大きくなると、偶数次モードもしくはPure Tangential Modeの振動条件を満たし、プラットフォーム50はその振動条件を満たすモードで振動することになり、そのモード関数で決められた振幅分布に従って振動する。このように、振動子20と2箇所で機械的に結合されたプラットフォーム50は、常にその全面が一様に振動するとは限らない。
例えばプラットフォーム50の共振周波数が、振動子20の振動周波数より高い場合には、プラットフォーム50が共振振動することは無く、プラットフォーム50は完全剛体となり振動子20の結合部の振動に従って一様な振動をする。
なお図14はnが奇数の場合の例で、振動子20の材料として単結晶Siを想定してポアソン比を0.28とし、振動子20についてCompound Modeのn=1、3、m=1〜4、プラットフォーム50についてはn=1、3、最低次モードのm=1について計算したものである。実際の共振周波数は式(15)から計算できる。
もちろんこの条件を満たさない場合であっても、プラットフォーム50に共振振動が励振されない条件があると考えられるが、細かな条件分けが必要であり、さらに深く研究を行い、条件を把握していくことが必要である。
図15はnが偶数の場合の例で、振動子20の材料として単結晶Siを想定してポアソン比を0.28とし、振動子20についてCompound Modeのn=2、4、m=1〜4、プラットフォーム50についてはn=2、4の最低次モードのm=1とし、Tangential Modeのm=1について計算したものである。ここでもプラットフォーム50の大きさをハッチングで示した領域内となるように形成すれば、プラットフォーム50はモードによる振動は発生することなく一様な回転振動をすることになる。
このようにして、センサ10においては高感度な質量の物体の検出や、質量の検出を行うことが可能となる。また、振動子20は、いわゆるSi単結晶を構造材料として用い、MEMS技術によって製造することができることから、Si半導体と同一チップ内にセンサ10を組み込んで作ることも可能となる。
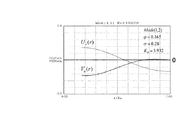
式(10)において、m=1、n=3とし、振動子20の材料として単結晶Si(ポアソン比ρ=0.28、ヤング率E=130GPa、密度σ=2300kg/m3)を想定し、φ=Rb/Ra=0.73とした場合、計算結果は図16のようになる。
この図16に示すように、r/Ra=1、すなわち振動子20の外径部分においては、V3(Ra)=0であることから、振動子20の外径部分ではθ方向の変位が常に0になる。また、r方向のモード関数であるU3(r、θ)はcos3θの関数でもあり、θ=π/6±iπ/3(ここでi=0、1、2、・・・)においてU3(r、θ)=0になることから、これらの角度でr方向の変位も0になる。すなわちφ=0.73の振動子20では、外径部分において角度θ=π/6、θ=3π/6、5π/6、7π/6、9π/6、11π/6の6箇所の位置P1〜P6では全く振動がない。すなわちこの位置で振動子20を保持すれば、振動エネルギが保持部を通して失われることは無い。
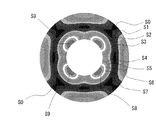
この例のモード姿態を図17に示す。図17は、振動子20上における振動振幅の大きさを10段階に区分して示しており、S0で示す部分が振幅最小(ゼロ)、S9で示す部分が振幅最大である。
また、これらの位置における振動成分はsin3θ=0であることから、θ成分の振動ではなくr成分の振動である。またθ=0の位置P11とθ=6π/6の位置P14、θ=2π/6の位置P12とθ=8π/6の位置P15、θ=4π/6の位置P13とθ=10π/6の位置P16の、それぞれ振動子20の中心に対して点対象となる2箇所から構成される各組においては、それぞれ振動の向きが同一方向に揃っている。したがって、これらの位置にプラットフォーム50を連結して設ければ、プラットフォーム50が振動モードに影響を与えることがない。
このとき、プラットフォーム50は、振動子20におけるブリッジ51による連結位置と同一方向に直線的に変位するため、振動子20において、近似的に振動子20の質量がプラットフォーム50の質量分だけ増えたことに相当するとして考えることができ、質量の増加により振動子20の振動周波数は低下する。
表1は、振動子20の外径Ra=100μm、内径Rb=73.4μm、プラットフォーム50の外径Rs=70.7μm、振動子20およびプラットフォーム50を単結晶シリコン材料で形成した場合における、プラットフォーム50の有無による振動子20の振動周波数の違いを示すものである。
このことから、振動子20の外径部分におけるTangential方向の振動を示すVn(r)|r=Raが0になるポアソン比σを縦軸に、Rb/Raを横軸にしてこの関係を図示すると図7(a)のようになる。
この図7(a)を見ると、Rb/Raを0.73付近に選べば、振動子20の材料のポアソン比依存性が非常に小さくなっていることがわかる。すなわち振動子20を構成する材料のポアソン比がバラついてもRb/Raの比がほとんど変化しないことを意味し、振動子20にとって最も重要なファアクターと考えられるQ値(Quality Factor)に対する設計性が高いことを意味する。これにより、振動子20は、φ=0.70〜0.78、特にφ=0.73〜0.74とするのが好ましい。
また、図18に示したように、振動子20の中心に対して対称で保持部材22との角度が30度(π/6)である内径部分の2箇所においてブリッジ51によってプラットフォーム50を機械的に接続すれば、プラットフォーム50は振動子20の振動によって一様に振動する。
しかし、プラットフォーム50をこのような形で振動子20と機械的に接続することによって振動子20の振動に影響を与え、振動子20の外径部分において、6箇所で全く振動の生じない場所が生ずる条件であるφ≒0.73等に影響を与える事が予想される。
すなわち、図18に示すように、振動子20にブリッジ51を介してプラットフォーム50を付加すると、プラットフォーム50は振動子20と共に振動することになり、近似的に振動子20の振動質量が増えたこと、すなわち振動子20の密度が増えたことと考えることができる。
例えば、振動子20を、外径Ra=100um,内径Rb=73.4um,プラットフォーム50の外径をRs=70.7umとし、材料に単結晶シリコン(E=130Gpa,ρ=2300Kg/m3,σ=0.28)を用いた場合、振動子20の質量は、式(16)のようになる。
ρ=130Gpa*[1+Rs2/(Ra2−Rb2)]
となり、振動周波数は5.80MHzまで下がることになる。
一方、図7(a)において、φ≒0.81における状態を見ると、V3,1(Ra)=0を満たす状態は存在せず、振動エネルギは振動子20の外径部分に設けられた支持部材22を通じて逃げてしまう状態とも考えることができる。この状態はプラットフォーム50を設けた場合でもプラットフォームの無い状態のφ=0.73の時の周波数となるように、予めφを小さくし、例えばφ≒0.65前後にしてプラットフォーム50を設ければφ≒0.73の状態になることが式(19)および式(21)を計算する事によってわかる。
この様に、周波数の変動から振動子20の振動状態を推定することによって、φの最良の値は、0.65から0.81前後まで変わる場合が起こりうると考えることができる。
ここで、今検討している(3、1)モードはn=3、m=1の場合であり、この(3、1)モードより低い共振周波数が起こるモードは、図20から(2、1)モードのみであることが判る。例えばトランジスタ等の半導体素子とこの振動子20を組み合わせて発信器を構成した場合、トランジスタ等の半導体素子は一般に低い周波数ほど増幅度が高いため、目的とする発振周波数より低い周波数については発信能力を有しており、(2、1)モードの振動周波数が発信器のスプリアス振動周波数になりかねない。従って、この(2、1)モードの振動が発生しないようにしておくことが必要である。
この振動子20は、(3、1)モードで振動させて使用されるもので、振動子20の内径と外径との比φは、φ=Rb/Ra=0.73とした。この振動子20は、外径部分において角度θ=3π/6、7π/6、11π/6の3箇所において、支持部材22により120°間隔で保持されている。
そして、振動子20に形成された開口部21には、ブリッジ51を介してプラットフォーム50が一体に接合されている。ブリッジ51は、振動子20の中心に対して点対称の位置で、かつ振動振幅が大きいθ=0、6π/6の2箇所において、180°間隔で設けられている。
このような振動子20とプラットフォーム50、ブリッジ51は、同一平面内に位置するのが好ましい。これによりこれらを同一材料によって形成することができる。
さらに、上記したような、プラットフォーム50を備えて(3、1)モードで振動して用いられるディスク型の振動子20は、外径と内径との比φが、φ=0.7以上と大きく、プラットフォーム50の面積を大きくすることができる。つまりこれにより、センサ10の感度を特に高いものとすることができる。また、振動子20の外径と内径の比が前記した範囲内であれば、材料依存性が低いため、例えば今後、単結晶Si以上に優れた材料が出現した場合にも、本発明と同様の構成を適用することが可能となる。加えて、このような構成においては、(2、1)モードの振動を抑制できるので、共振を防ぎ、この点においても高感度化を図ることができる。
また、図22に示した例では、振動子20を120°間隔の3箇所の不動点で支持するようにしたが、6箇所の不動点の全てで振動子20を支持するようにしても良い。また、振動子20を支持する支持部を機械的に十分に高い強度を有したものとできるのであれば、振動子20は1箇所のみで支持するようにしても良い。また、図22の例では、駆動源30、検出部40を構成する電極31、41を、それぞれ3個ずつ設ける例を示したが、その数を適宜少なくすることも可能である。一般には駆動や検出のための電極31、41の結合面積を小さくすると動作インピーダンスが高くなることによって生ずるインピーダンス不整合による通過損が増大してしまうが、発信器を作る時にはループゲインを十分で取ることで、これを補うこともできる。
これ以外にも、本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
Claims (14)
- ディスク状の振動子と、
前記振動子に機械的に結合され、質量を有した物質が付着または吸着するプラットフォームと、
前記振動子を振動させる駆動部と、
前記振動子における振動の変化を検出することで、前記物質を検出する検出部と、を備え、
前記振動子の中央部に開口部が形成され、前記プラットフォームは前記開口部の内側に配置され、ブリッジを介して前記振動子の前記開口部の内縁部に結合されていることを特徴とする検出センサ。 - 前記プラットフォームは、その共振周波数が前記振動子の共振周波数よりも高くなるように形成されていることを特徴とする請求項1に記載の検出センサ。
- ディスク状の振動子と、
前記振動子に機械的に結合され、質量を有した物質が付着または吸着するプラットフォームと、
前記振動子を振動させる駆動部と、
前記振動子における振動の変化を検出することで、前記物質を検出する検出部と、
を備え、
前記プラットフォームは、その共振周波数が前記振動子の共振周波数よりも高くなるように形成されていることを特徴とする検出センサ。 - 前記プラットフォームは、前記振動子において前記振動子のRadial方向またはTangential方向の一方のみに振動が生じる部位にて、前記振動子に結合されていることを特徴とする請求項1から3のいずれか一項に記載の検出センサ。
- 前記プラットフォームは、前記振動子と一体的に、前記振動子のRadial方向への直線な振動、または前記振動子のTangential方向への回転振動を行うことを特徴とする請求項4に記載の検出センサ。
- 前記プラットフォームは、前記振動子において、振幅が最大となる部位またはその近傍に結合されていることを特徴とする請求項4または5に記載の検出センサ。
- 前記振動子は、外径がRaとされ、中央部に前記開口部が形成されることで内径がRbとされたリング状で、
前記振動子が振動したときの位置座標(r、θ)における位置rでの、式(1)で表されるRadial方向の変位U(r)、Tangential方向の変位V(r)が、r=RaまたはRbとしたときにU(r)=0またはV(r)=0をほぼ満足する外径Raと内径Rbで、前記振動子が形成されていることを特徴とする請求項1から6のいずれか一項に記載の検出センサ。
- 前記式(1)においてr=RaであるときにU(r)=0またはV(r)=0をほぼ満足する場合、前記振動子は外径部分で支持されていることを特徴とする請求項7に記載の検出センサ。
- 前記振動子の中央部に前記開口部が形成され、前記プラットフォームは前記ブリッジを介して前記振動子の前記開口部の内縁部に結合され、
前記駆動部は、前記振動子を、高調波振動の次数m=1、振動モードのモード数n=3とした(3、1)モードで駆動することを特徴とする請求項1または3に記載の検出センサ。 - 前記振動子は、外径をRa、前記開口部の内径をRbとしたときに、Rb/Raが0.65〜0.81であることを特徴とする請求項9に記載の検出センサ。
- 前記振動子は、その外径部分において、前記振動子のRadial方向およびTangential方向の振動がほぼゼロとなる複数の位置で支持され、前記振動子の支持位置は、前記振動子の中心に対する角度が60°または60°の整数倍となる間隔とされていることを特徴とする請求項9または10に記載の検出センサ。
- 前記振動子は、120°間隔の3箇所で支持されていることを特徴とする請求項11に記載の検出センサ。
- 前記プラットフォームは、前記振動子の前記開口部に対して、前記振動子と一体的に挙動する、前記振動子の中心に対して対称となる2箇所において結合されていることを特徴とする請求項9から12のいずれか一項に記載の検出センサ。
- 前記プラットフォームは、前記振動子における、高調波振動の次数m=1、振動モードのモード数n=2とした(2、1)モードの振動を抑圧する位置にて前記振動子の前記開口部に結合されていることを特徴とする請求項13に記載の検出センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007046199A JP4807632B2 (ja) | 2006-06-22 | 2007-02-26 | 検出センサ |
| EP07744558A EP2031368A1 (en) | 2006-06-22 | 2007-06-01 | Detection sensor |
| PCT/JP2007/061170 WO2007148522A1 (ja) | 2006-06-22 | 2007-06-01 | 検出センサ |
| US12/293,348 US8006561B2 (en) | 2006-06-22 | 2007-06-01 | Detection sensor |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006172217 | 2006-06-22 | ||
| JP2006172217 | 2006-06-22 | ||
| JP2007046199A JP4807632B2 (ja) | 2006-06-22 | 2007-02-26 | 検出センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008026304A JP2008026304A (ja) | 2008-02-07 |
| JP4807632B2 true JP4807632B2 (ja) | 2011-11-02 |
Family
ID=38833264
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007046199A Expired - Fee Related JP4807632B2 (ja) | 2006-06-22 | 2007-02-26 | 検出センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8006561B2 (ja) |
| EP (1) | EP2031368A1 (ja) |
| JP (1) | JP4807632B2 (ja) |
| WO (1) | WO2007148522A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009041371A1 (ja) * | 2007-09-28 | 2009-04-02 | National Institute Of Advanced Industrial Science And Technology | 検出センサ |
| FR2931550B1 (fr) * | 2008-05-20 | 2012-12-07 | Commissariat Energie Atomique | Dispositif pour la detection gravimetrique de particules en milieu fluide comprenant un oscillateur entre deux canaux fluidiques, procede de realisation et methode de mise en oeuvre du dispositif |
| FR2931549B1 (fr) * | 2008-05-20 | 2017-12-08 | Commissariat A L'energie Atomique | Dispositif pour la detection gravimetrique de particules en milieu fluide, comprenant un oscillateur traverse par une veine fluidique, procede de realisation et methode de mise en oeuvre du dispositif |
| JP2010078345A (ja) * | 2008-09-24 | 2010-04-08 | National Institute Of Advanced Industrial Science & Technology | 検出センサ、振動子 |
| JP2010078334A (ja) * | 2008-09-24 | 2010-04-08 | National Institute Of Advanced Industrial Science & Technology | 検出センサ、振動子 |
| WO2010037085A1 (en) | 2008-09-29 | 2010-04-01 | The Board Of Trustees Of The University Of Illinois | Dna sequencing and amplification systems using nanoscale field effect sensor arrays |
| WO2011021984A1 (en) * | 2009-08-20 | 2011-02-24 | Haluk Kulah | A microfluidic-channel embeddable, laterally oscillating gravimetric sensor device fabricated with micro-electro-mechanical systems (mems) technology |
| US9250113B2 (en) * | 2010-06-21 | 2016-02-02 | The Board Of Trustees Of The University Of Illinois | Cell mass measurement and apparatus |
| EP2630479B1 (en) | 2010-10-20 | 2020-04-08 | Qorvo US, Inc. | Apparatus and method for measuring binding kinetics and concentration with a resonating sensor |
| US10147772B2 (en) * | 2016-08-23 | 2018-12-04 | 3M Innovative Properties Company | Foldable OLED device with compatible flexural stiffness of layers |
| EP3715826B1 (en) * | 2019-03-26 | 2024-03-06 | Infineon Technologies AG | Sensor device, particle sensor device and method for detecting a particulate matter density |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4333029A (en) * | 1979-09-04 | 1982-06-01 | Baker Industries, Inc. | Piezoelectric seismic sensor for intrusion detection |
| JPS63144233A (ja) * | 1986-12-08 | 1988-06-16 | Fuji Electric Co Ltd | 振動式トランスジユ−サ |
| WO1999013300A1 (en) * | 1997-09-08 | 1999-03-18 | Ngk Insulators, Ltd. | Mass sensor and mass detection method |
| JP2001056278A (ja) * | 1999-08-20 | 2001-02-27 | Stanley Electric Co Ltd | 質量検出型ガスセンサ |
| ATE521887T1 (de) * | 2001-06-20 | 2011-09-15 | M S Tech Ltd | Anordnung von piezoelektrischen resonatoren zum nachweis von spuren einer substanz |
| US20050225413A1 (en) * | 2001-10-26 | 2005-10-13 | Kozicki Michael N | Microelectromechanical structures, devices including the structures, and methods of forming and tuning same |
| JP2006004197A (ja) | 2004-06-17 | 2006-01-05 | Sekisui House Ltd | 明暗順応機能を有する住宅プレゼンテーションシステム |
| JP2006073742A (ja) | 2004-09-01 | 2006-03-16 | Toshiba Corp | 電子回路モジュールとその製造方法 |
| JP4638281B2 (ja) * | 2005-05-30 | 2011-02-23 | 独立行政法人産業技術総合研究所 | 検出センサ、振動子 |
| JP2007187485A (ja) * | 2006-01-11 | 2007-07-26 | National Institute Of Advanced Industrial & Technology | 検出センサ |
| US7681433B2 (en) * | 2005-05-30 | 2010-03-23 | National Institute Of Advanced Industrial Science And Technology | Detection sensor and resonator |
-
2007
- 2007-02-26 JP JP2007046199A patent/JP4807632B2/ja not_active Expired - Fee Related
- 2007-06-01 US US12/293,348 patent/US8006561B2/en not_active Expired - Fee Related
- 2007-06-01 EP EP07744558A patent/EP2031368A1/en not_active Withdrawn
- 2007-06-01 WO PCT/JP2007/061170 patent/WO2007148522A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US8006561B2 (en) | 2011-08-30 |
| US20090199639A1 (en) | 2009-08-13 |
| WO2007148522A1 (ja) | 2007-12-27 |
| JP2008026304A (ja) | 2008-02-07 |
| EP2031368A1 (en) | 2009-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4807632B2 (ja) | 検出センサ | |
| US7681433B2 (en) | Detection sensor and resonator | |
| CA2637930C (en) | Self-exciting, self-sensing piezoelectric cantilever sensor | |
| US20060238078A1 (en) | Wireless and passive acoustic wave rotation rate sensor | |
| US10032976B2 (en) | Microelectromechanical gyroscopes and related apparatus and methods | |
| EP2649458B1 (en) | Mode-matched single proof-mass dual-axis gyroscope and method of fabrication | |
| CN102706337B (zh) | 压电圆盘微机械陀螺 | |
| US8349611B2 (en) | Resonant sensors and methods of use thereof for the determination of analytes | |
| CN109374729B (zh) | 一种声学微质量传感器及检测方法 | |
| KR100364968B1 (ko) | 진동 자이로스코프 | |
| WO2013181126A1 (en) | Xy-axis shell-type gyroscopes with reduced cross-talk sensitivity and/or mode matching | |
| JP2006329931A (ja) | 検出センサ、振動子 | |
| JP3942762B2 (ja) | 振動子、振動型ジャイロスコープ、直線加速度計および回転角速度の測定方法 | |
| JP4780498B2 (ja) | 検出センサ | |
| US8196451B2 (en) | Detection sensor | |
| Feng et al. | Design of a novel gear-like disk resonator gyroscope with high mechanical sensitivity | |
| JP2004093574A (ja) | 原子間力顕微鏡用力方位センサ付カンチレバー | |
| JP3751745B2 (ja) | 振動子、振動型ジャイロスコープおよび回転角速度の測定方法 | |
| JP2006523835A (ja) | 破裂イベントセンサ装置 | |
| JP2009074996A (ja) | 圧電振動ジャイロ | |
| JP3974766B2 (ja) | 弾性表面波素子 | |
| JPH11304494A (ja) | 振動ジャイロ及びその使用方法 | |
| JP2007187485A (ja) | 検出センサ | |
| JP2010078345A (ja) | 検出センサ、振動子 | |
| JP2004077351A (ja) | 角速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110708 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110727 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110804 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140826 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |