JP4802948B2 - 負荷駆動制御装置 - Google Patents
負荷駆動制御装置 Download PDFInfo
- Publication number
- JP4802948B2 JP4802948B2 JP2006238880A JP2006238880A JP4802948B2 JP 4802948 B2 JP4802948 B2 JP 4802948B2 JP 2006238880 A JP2006238880 A JP 2006238880A JP 2006238880 A JP2006238880 A JP 2006238880A JP 4802948 B2 JP4802948 B2 JP 4802948B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- temperature
- current
- transistor
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Protection Of Static Devices (AREA)
- Emergency Protection Circuit Devices (AREA)
- Continuous-Control Power Sources That Use Transistors (AREA)
- Dc-Dc Converters (AREA)
- Electronic Switches (AREA)
Description
この特許文献1の技術では、電界効果トランジスタを前記電流駆動素子とし、駆動回路を前記制御手段として、電界効果トランジスタをPWM(Pulse Width Modulation)制御することにより、負荷に流れる電流を制御している。
特許文献1の技術では、電動機の電機子コイルが負荷であるため、電流駆動素子である電界効果トランジスタが異常に発熱して故障や破壊が起こる一番の原因として、電動機のモーターロック時に電機子コイルに過大電流が流れ、その過大電流が電流駆動素子にも流れることがあげられる。
しかし、負荷への通電をカットすると、負荷駆動制御装置が機能停止するため、負荷駆動制御装置のユーザーに与える影響が大きいという問題がある。
ちなみに、抵抗負荷としては、各種ヒーター(例えば、PTC(Positive Temperature Coefficient)ヒーター、ニッケルクロム線ヒーター、鉄クロム線ヒーターなど)がある。特に、PTCヒーターは、ヒーター自身が温度に応じて流れる電流を制御するため、負荷として好適である。
そこで、抵抗負荷の場合に、負荷への通電をカットすることなく電流駆動素子を故障や破壊から保護する技術が要求されている。
電源(11)から負荷(17)に供給される駆動電流を制御する電流駆動素子(21)と、
前記電流駆動素子の動作を制御する制御手段(15,22,23)と、
前記電流駆動素子の温度を直接的または間接的に検出する温度センサ(25)と、
その温度センサの検出結果に基づいて、前記電流駆動素子が異常に発熱して温度が過剰に高くなっている温度異常状態かどうかを判定し、温度異常状態と判定した場合には、前記電流駆動素子の電力損失が低減するような制御を前記制御手段に実行させる保護手段(24)とを備え、
前記負荷(17)は、デッドショートを含まない通常使用状態では過大電流が流れない性質を有するヒーターであり、
前記保護手段(24)は、温度異常状態と判定した際に、前記制御手段(15,22,23)が前記電流駆動素子(21)の通常制御中であれば、前記電流駆動素子がフルオン固定状態になるような制御を前記制御手段に実行させる負荷駆動制御装置(10)をその技術的特徴とする。
請求項1に記載の負荷駆動制御装置において、
前記制御手段(15,22,23)は、前記通常制御中には前記電流駆動素子(21)をPWM制御し、
前記保護手段(24)は、温度異常状態と判定した際に、前記制御手段(15,22,23)が前記電流駆動素子(21)の通常制御中でない場合には、前記電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御を前記制御手段に実行させることを技術的特徴とする。
請求項2に記載の負荷駆動制御装置において、
前記電力損失が低損失になるような制御は、前記電流駆動素子(21)を制御するための制御信号のデュ−ティ比を低い値に設定した制御か、または、前記制御信号のスイッチング周波数を低い値に設定した制御であることを技術的特徴とする。
請求項1に記載の負荷駆動制御装置において、
前記制御手段(15,22,23)は、前記通常制御中には前記電流駆動素子(21)をリニア制御し、
前記保護手段(24)は、温度異常状態と判定した際に、前記制御手段(15,22,23)が前記電流駆動素子(21)の通常制御中でない場合には、前記電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御を前記制御手段に実行させることを技術的特徴とする。
請求項1の発明において、温度センサ(25)が電流駆動素子(21)の温度を直接的に検出するには、電流駆動素子を形成する半導体チップに温度センサを取付固定する。
また、温度センサが電流駆動素子の温度を間接的に検出するには、温度センサを電流駆動素子のパッケージに取付固定するか又はパッケージの近傍に配置しておき、パッケージの温度またはパッケージ周辺の温度を検出する。
その結果、電流駆動素子の温度異常状態が解消されて正常状態に戻ると、保護手段は温度異常状態ではないと判定するため、制御手段は電流駆動素子を通常制御に戻す。
従って、請求項1の発明によれば、電流駆動素子の温度異常時でも、電流駆動素子をフルオフ固定状態にして動作を停止させることにより負荷への通電をカットする方法を使用する必要がない。
その結果、電流駆動素子の温度異常状態が解消されて正常状態に戻ると、保護手段は温度異常状態ではないと判定するため、制御手段は電流駆動素子を通常制御に戻す。
従って、請求項1の発明によれば、請求項1の作用・効果を確実に得られる。
請求項2の発明によれば、制御手段(15,22,23)が電流駆動素子(21)をPWM制御する負荷駆動制御装置を実現できる。
請求項2の発明において、保護手段(24)は、温度異常状態と判定した際に(S101:Yes)、制御手段(15,22,23)が電流駆動素子(21)を通常制御中でない場合には(S102:No)、電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御(S104)を制御手段に実行させる。
尚、通常制御中でない場合とは、フルオン固定状態に制御中ということである。
その結果、電流駆動素子の温度異常状態が解消されて正常状態に戻ると、保護手段は温度異常状態ではないと判定するため、制御手段は電流駆動素子を通常制御に戻す。
従って、請求項2の発明によれば、請求項1の作用・効果を更に確実に得られる。
請求項3の発明では、電流駆動素子をフルオン固定状態にした場合よりも電力損失(スイッチング損失)が低損失になるような制御として、電流駆動素子を制御するための制御信号のデューティ比を低い値(低デューティ側)に設定した制御、または、当該制御信号のスイッチング周波数を低い値に設定した制御を行う。
ここで、デューティ比やスイッチング周波数の具体値は、電流駆動素子のスイッチング損失が十分に低減されるように、カット・アンド・トライで実験的に最適値を見つけて設定すればよい。
請求項4の発明によれば、制御手段(15,22,23)が電流駆動素子(21)をリニア制御する負荷駆動制御装置を実現できる。
請求項4の発明において、保護手段(24)は、温度異常状態と判定した際に(S201:Yes)、制御手段(15,22,23)が電流駆動素子(21)を通常制御中でない場合には(S202:No)、電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御(S204)を制御手段に実行させる。
尚、通常制御中でない場合とは、フルオン固定状態に制御中ということである。
このように、電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるように制御されると、電流駆動素子の電力損失が更に低減され、電流駆動素子の発熱が抑制されて温度が低下する。
その結果、電流駆動素子の温度異常状態が解消されて正常状態に戻ると、保護手段は温度異常状態ではないと判定するため、制御手段は電流駆動素子を通常制御に戻す。
従って、請求項4の発明によれば、請求項1の作用・効果を更に確実に得られる。
ちなみに、電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御とは、例えば、電流駆動素子がPチャネルMOSトランジスタの場合には、電流駆動素子を制御するための制御信号の電圧値を高い値に設定した制御であり、電流駆動素子がNチャネルMOSトランジスタの場合には当該制御信号の電圧値を低い値に設定した制御である。
ここで、制御信号の電圧値の具体値は、電流駆動素子の電力損失が十分に低減されるように、カット・アンド・トライで実験的に最適値を見つけて設定すればよい。
上術した[課題を解決するための手段][発明の効果]に記載した( )内の符号等は、後述する[発明を実施するための最良の形態]に記載した構成部材・構成要素の符号等に対応したものである。
そして、[課題を解決するための手段][発明の効果]に記載した構成部材・構成要素と、[発明を実施するための最良の形態]に記載した構成部材・構成要素との対応関係は以下のようになっている。
「電流駆動素子」は、Pチャネル・パワーMOSトランジスタ21に該当する。
「制御手段」は、ECU15,駆動回路22,入力信号処理回路23に該当する。
請求項1〜3の「保護手段」は、保護回路24に該当する。
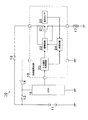
図1は、第1実施形態の負荷駆動制御装置10の概略構成を示すブロック回路図である。
負荷駆動制御装置10は、直流電源11、ヒューズ12,13、イグニッションスイッチ14、電子制御装置(ECU:Electrical Control Unit)15、制御駆動回路16から構成され、直流電源11から抵抗負荷であるPTCヒーター17に供給される駆動電流を制御してPTCヒーター17を駆動制御する。
そして、ECU15は、トランジスタ21をPWM制御するための制御信号を生成して出力する。尚、第1実施形態の制御信号は、ハイレベルとロウレベルが所定周期で切り替わる矩形波のスイッチング信号(PWM信号)である。
トランジスタ21のゲートは駆動回路22に接続され、トランジスタ21のドレインはPTCヒーター17からアースラインを介して直流電源11のマイナス側端子に接続され、トランジスタ21のソースはヒューズ12を介して直流電源11のプラス側端子に接続されている。
保護回路24は、温度センサ25の検出結果に基づいて、後述するトランジスタ21の温度保護機能の動作を実行する。
尚、温度センサ25をトランジスタ21のパッケージに取付固定するか又はパッケージの近傍に配置しておき、パッケージの温度またはパッケージ周辺の温度を計測することにより、トランジスタ21の温度を間接的に検出するようにしてもよい。
トランジスタ21がON(オン)すると、トランジスタ21を介して直流電源11からPTCヒーター17に駆動電流が供給され、PTCヒーター17が加熱される。また、トランジスタ21がOFF(オフ)すると、トランジスタ21を介して直流電源11からPTCヒーター17に供給されていた駆動電流が停止され、PTCヒーター17の加熱も停止される。つまり、トランジスタ21は、直流電源11から抵抗負荷であるPTCヒーター17に供給される駆動電流を制御する。
保護回路24は、以下の各ステップ(以下、「S」と記載する)の処理を実行する。
尚、温度異常状態の判定方法には、例えば、温度センサ25が検出した温度が所定のしきい値を超えたかどうかを判定する方法や、当該温度が所定のしきい値を超えた状態が所定時間以上継続しているかどうか判定する方法などがある。
すなわち、保護回路24が温度異常状態ではなくトランジスタ21の温度が正常であると判定した場合、入力信号処理回路23は、ECU15が生成した制御信号を駆動回路22へ出力する。そして、駆動回路22は、ECU15が生成した制御信号に基づいて、トランジスタ21をPWM制御するための駆動信号を生成し、その駆動信号をトランジスタ21のゲートへ出力する。
そのため、第1実施形態において、温度異常状態でない正常状態(通常状態)の場合、トランジスタ21はPWM制御される。つまり、第1実施形態において、PWM制御は通常制御といえる。
すなわち、保護回路24は、S103の処理にて、トランジスタ21をフルON(フルオン)固定状態にするための制御信号を生成し、その制御信号を駆動回路22へ出力する。すると、駆動回路22は、入力信号処理回路23から出力された制御信号ではなく、保護回路24が生成した制御信号に基づいて、トランジスタ21をフルON固定状態にするための駆動信号を生成し、その駆動信号をトランジスタ21のゲートへ出力する。
尚、第1実施形態において、トランジスタ21をフルON固定状態にするための制御信号とは、デューティ比(ON Duty)が100%の制御信号である。
すなわち、保護回路24は、S104の処理にて、トランジスタ21をフルON固定状態にした場合よりもスイッチング損失が低損失になるような制御信号を生成し、その制御信号を駆動回路22へ出力する。すると、駆動回路22は、入力信号処理回路23から出力された制御信号ではなく、保護回路24が生成した制御信号に基づいて、トランジスタ21を低損失制御するための駆動信号を生成し、その駆動信号をトランジスタ21のゲートへ出力する。
ここで、制御信号のデューティ比やスイッチング周波数の具体値は、トランジスタ21のスイッチング損失が十分に低減されるように、カット・アンド・トライで実験的に最適値を見つけて設定すればよい。
第2実施形態の負荷駆動制御装置10の構成は、図1に示した第1実施形態と同じである。
第2実施形態において、第1実施形態と異なるのは、ECU15および保護回路24の動作だけである。
まず、保護回路24は、第1実施形態のS101の処理と同じく、温度センサ25の検出結果に基づいて、トランジスタ21が異常に発熱して温度が過剰に高くなっている温度異常状態かどうかを判定する(S201)。
そして、保護回路24は、温度異常状態ではないと判定した場合には(S201:No)、再びS201の処理に戻る。
尚、第2実施形態において、温度異常状態でない正常状態(通常状態)の場合、トランジスタ21はリニア制御される。つまり、第2実施形態において、リニア制御は通常制御といえる。
尚、第2実施形態において、トランジスタ21をフルON固定状態にするための制御信号とは、トランジスタ21がPチャネルMOSトランジスタであるため、トランジスタ21が完全にONするような低い電圧の制御信号である。
ちなみに、トランジスタ21がNチャネルMOSトランジスタの場合には、トランジスタ21をフルON固定状態にするための制御信号とは、トランジスタ21が完全にONするような高い電圧の制御信号である。
すなわち、保護回路24は、S204の処理にて、トランジスタ21をフルON固定状態にした場合よりも電力損失が低損失になるような制御信号を生成し、その制御信号を駆動回路22へ出力する。すると、駆動回路22は、入力信号処理回路23から出力された制御信号ではなく、保護回路24が生成した制御信号に基づいて、トランジスタ21を低損失制御するための駆動信号を生成し、その駆動信号をトランジスタ21のゲートへ出力する。
ここで、制御信号の電圧値の具体値は、トランジスタ21の電力損失が十分に低減されるように、カット・アンド・トライで実験的に最適値を見つけて設定すればよい。
ちなみに、トランジスタ21がNチャネルMOSトランジスタの場合には、トランジスタ21をフルON固定状態にした場合よりも電力損失が低損失になるような制御信号とは、電圧値を低い値に設定した制御信号である。
図4は、第3実施形態の負荷駆動制御装置30の概略構成を示すブロック回路図である。
負荷駆動制御装置30は、直流電源11、ヒューズ12,13、イグニッションスイッチ14、電子制御装置15、制御駆動回路16、バイパス用リレー31から構成され、直流電源11から抵抗負荷であるPTCヒーター17に供給される駆動電流を制御してPTCヒーター17を駆動制御する。
そして、制御駆動回路16は、トランジスタ21、駆動回路22、入力信号処理回路23、保護回路24、温度センサ25などから構成されている。
[A]バイパス用リレー31は、トランジスタ21のソース・ドレイン間と並列接続され、通常状態ではOFFされており、リレー駆動信号によってONされる。
[B]ECU15は、第1実施形態と同じくトランジスタ21をPWM制御するための制御信号を生成して出力すると共に、後述するトランジスタ21の温度保護機能の動作を実行する。
そして、保護回路24は、温度異常状態ではないと判定した場合には(S301:No)、再びS301の処理に戻る。
すると、ECU15は、保護回路24から出力されたダイアグ信号に基づいて、トランジスタ21をPWM制御するための制御信号の生成を停止する(S302)。
その結果、トランジスタ21はフルOFF固定状態になって動作が停止され、トランジスタ21からPTCヒーター17への駆動電流の供給は停止される。
バイパス用リレー31がONすると、トランジスタ21をバイパスし、バイパス用リレー31を介して直流電源11からPTCヒーター17に駆動電流が供給され、PTCヒーター17が加熱される。
尚、通常状態ではバイパス用リレー31がOFFされているため、バイパス用リレー31を介して直流電源11からPTCヒーター17に電流が流れることはない。
図6は、第4実施形態の負荷駆動制御装置40の概略構成を示すブロック回路図である。
負荷駆動制御装置40において、第3実施形態の負荷駆動制御装置30と異なるのは、ECU15が温度保護機能の動作に無関係であることと、保護回路24の動作だけである。
そして、保護回路24は、温度異常状態ではないと判定した場合には(S401:No)、再びS401の処理に戻る。
すなわち、保護回路24は、S402の処理にて、トランジスタ21をフルOFF固定状態にするための制御信号を生成し、その制御信号を駆動回路22へ出力する。すると、駆動回路22は、入力信号処理回路23から出力された制御信号ではなく、保護回路24が生成した制御信号に基づいて、トランジスタ21をフルOFF固定状態にするための駆動信号を生成し、その駆動信号をトランジスタ21のゲートへ出力する。
従って、第4実施形態によれば、第3実施形態と同様の作用・効果が得られる。
本発明は上記各実施形態に限定されるものではなく、以下のように具体化してもよく、その場合でも、上記各実施形態と同等もしくはそれ以上の作用・効果を得ることができる。
しかし、上記各実施形態は、負荷としてのPTCヒーター17とアースとの間に、PTCヒーター17の駆動電流を制御する電流駆動素子としてのトランジスタ21が接続された構成に変更してもよく、このような構成は一般に「ローサイド構成」と呼ばれる。
つまり、本発明は、ハイサイド構成とローサイド構成の両方に適用できる。
しかし、本発明は、PTCヒーター17に限らず、抵抗体の負荷(抵抗負荷)であれば、どのような抵抗負荷(例えば、ニッケルクロム線ヒーター、鉄クロム線ヒーターなど)に適用してもよい。
また、本発明は、抵抗負荷に限らず、デッドショートを含まない通常使用状態では過大電流が流れない性質を有する負荷であれば、どのような負荷に適用してもよい。
また、トランジスタ21は、MOSトランジスタやバイポーラトランジスタに限らず、どのような電流駆動素子(例えば、IGBT(Insulated Gate Bipolar Transistor)、SIT(Static Induction Transistor)、サイリスタなど)に置き換えてもよい。
11…直流電源
12,13…ヒューズ
14…イグニッションスイッチ
15…ECU
16…制御駆動回路
17…PTCヒーター
21…Pチャネル・パワーMOSトランジスタ(電流駆動素子)
22…駆動回路
23…入力信号処理回路
24…保護回路
25…温度センサ
31…バイパス用リレー
Claims (4)
- 電源から負荷に供給される駆動電流を制御する電流駆動素子と、
前記電流駆動素子の動作を制御する制御手段と、
前記電流駆動素子の温度を直接的または間接的に検出する温度センサと、
その温度センサの検出結果に基づいて、前記電流駆動素子が異常に発熱して温度が過剰に高くなっている温度異常状態かどうかを判定し、温度異常状態と判定した場合には、前記電流駆動素子の電力損失が低減するような制御を前記制御手段に実行させる保護手段と
を備え、
前記負荷は、デッドショートを含まない通常使用状態では過大電流が流れない性質を有するヒーターであり、
前記保護手段は、温度異常状態と判定した際に、前記制御手段が前記電流駆動素子の通常制御中であれば、前記電流駆動素子がフルオン固定状態になるような制御を前記制御手段に実行させることを特徴とする負荷駆動制御装置。 - 請求項1に記載の負荷駆動制御装置において、
前記制御手段は、前記通常制御中には前記電流駆動素子をPWM制御し、
前記保護手段は、温度異常状態と判定した際に、前記制御手段が前記電流駆動素子の通常制御中でない場合には、前記電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御を前記制御手段に実行させることを特徴とする負荷駆動制御装置。 - 請求項2に記載の負荷駆動制御装置において、
前記電力損失が低損失になるような制御は、前記電流駆動素子を制御するための制御信号のデュ−ティ比を低い値に設定した制御か、または、前記制御信号のスイッチング周波数を低い値に設定した制御であることを特徴とする負荷駆動制御装置。 - 請求項1に記載の負荷駆動制御装置において、
前記制御手段は、前記通常制御中には前記電流駆動素子をリニア制御し、
前記保護手段は、温度異常状態と判定した際に、前記制御手段が前記電流駆動素子の通常制御中でない場合には、前記電流駆動素子をフルオン固定状態にした場合よりも電力損失が低損失になるような制御を前記制御手段に実行させることを特徴とする負荷駆動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006238880A JP4802948B2 (ja) | 2006-09-04 | 2006-09-04 | 負荷駆動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006238880A JP4802948B2 (ja) | 2006-09-04 | 2006-09-04 | 負荷駆動制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008061180A JP2008061180A (ja) | 2008-03-13 |
| JP2008061180A5 JP2008061180A5 (ja) | 2010-08-26 |
| JP4802948B2 true JP4802948B2 (ja) | 2011-10-26 |
Family
ID=39243376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006238880A Expired - Fee Related JP4802948B2 (ja) | 2006-09-04 | 2006-09-04 | 負荷駆動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4802948B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2466042B (en) * | 2008-12-09 | 2013-07-31 | Vphase Smart Energy Ltd | Voltage reduction |
| KR101096775B1 (ko) | 2009-03-17 | 2011-12-21 | 주식회사 피플웍스 | 펄스 앰프 제어 및 보호 시스템 |
| JP5765210B2 (ja) * | 2011-12-12 | 2015-08-19 | 株式会社デンソー | ヒータ駆動回路 |
| JP6623556B2 (ja) | 2015-05-27 | 2019-12-25 | 株式会社デンソー | 半導体装置 |
| JP6623829B2 (ja) | 2016-02-24 | 2019-12-25 | 株式会社デンソー | 過熱保護装置 |
| CN112711290B (zh) * | 2020-12-23 | 2022-05-13 | 杭州晶华微电子股份有限公司 | 半导体集成电路和用于半导体集成电路的温漂补偿方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4708773B2 (ja) * | 2004-11-30 | 2011-06-22 | 株式会社オートネットワーク技術研究所 | 電力供給制御装置 |
-
2006
- 2006-09-04 JP JP2006238880A patent/JP4802948B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008061180A (ja) | 2008-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5162335B2 (ja) | リレー制御装置 | |
| JP5381248B2 (ja) | 電力供給制御装置およびその制御方法 | |
| JP3914004B2 (ja) | 半導体素子の過電流検出・保護装置 | |
| CN108702113B (zh) | 电动机控制装置及搭载了该电动机控制装置的电动助力转向装置 | |
| JP4964536B2 (ja) | モータ異常検出装置及び方法 | |
| JP4701052B2 (ja) | 過電流検出装置 | |
| CN107820664B (zh) | 驱动装置 | |
| JP4802948B2 (ja) | 負荷駆動制御装置 | |
| US7782584B2 (en) | Load drive controller and control system | |
| JP5590031B2 (ja) | 電源保護回路およびそれを備えたモータ駆動装置 | |
| JP4529666B2 (ja) | 負荷駆動装置及び負荷駆動制御方法 | |
| JP2005051951A (ja) | 直流昇圧回路の故障判定装置 | |
| WO2011129263A1 (ja) | 短絡保護方法 | |
| JP6770986B2 (ja) | 誘導性負荷制御装置 | |
| JP4680042B2 (ja) | 制御回路装置 | |
| JP5099041B2 (ja) | 燃料ポンプ制御装置 | |
| JP2008276727A (ja) | 負荷駆動装置 | |
| JP2010104079A (ja) | 負荷駆動装置 | |
| JP2008206313A (ja) | 車両用電力変換装置の平滑コンデンサ放電装置 | |
| JP2004248093A (ja) | 負荷駆動回路 | |
| JP3692391B2 (ja) | 電源供給制御装置および電源供給制御方法 | |
| US20070103988A1 (en) | Circuit arrangement and method for controlling an inductive load | |
| JP5776559B2 (ja) | 給電制御装置 | |
| JP2005158870A (ja) | 負荷制御装置 | |
| JP2009240136A (ja) | モータ制御装置、及びモータ制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081020 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110610 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110712 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110725 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4802948 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140819 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |