JP4788481B2 - 結像状態検出装置、カメラ、及び受光ユニット - Google Patents
結像状態検出装置、カメラ、及び受光ユニット Download PDFInfo
- Publication number
- JP4788481B2 JP4788481B2 JP2006150686A JP2006150686A JP4788481B2 JP 4788481 B2 JP4788481 B2 JP 4788481B2 JP 2006150686 A JP2006150686 A JP 2006150686A JP 2006150686 A JP2006150686 A JP 2006150686A JP 4788481 B2 JP4788481 B2 JP 4788481B2
- Authority
- JP
- Japan
- Prior art keywords
- light receiving
- array
- detection device
- imaging state
- state detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Description
尚、焦点検出面とは、フイルム共役面のように、その面でピントを合わせようとする面のことである。
また本発明は、小型で高精度な結像状態検出装置を実現するための焦点検出ユニットを提供する。
P×F P > L ≧ P×F P /(Q−4)
また、前記複数の第1受光部アレイを個別に設けた複数のマイクロレンズと、前記複数の第2受光部アレイを個別に設けた複数のマイクロレンズとは、市松模様に配置されてもよい。
また、前記第1受光部アレイを設けたマイクロレンズの配列ピッチと、前記第2受光部アレイを設けたマイクロレンズの配列ピッチとは、互いに異なってもよい。
また、前記第1受光部アレイのアレイ方向の長さと、前記第2受光部アレイのアレイ方向の長さとは、互いに異なってもよい。
また、前記複数の受光部アレイの中には、互いに異なる分光感度特性を有した複数種類の受光部が存在してもよい。
また、前記複数の第1受光部アレイの中には、互いに異なる分光感度特性を有した複数種類の第1受光部アレイが存在してもよい。
また、前記複数種類の受光部のうち、特定の分光感度特性を有した特定種類の受光部は、他の分光感度特性を有した他種類の受光部よりも高密度に配列されてもよい。
また、前記複数の第1受光部アレイ及び前記複数の第2受光部アレイの各々の中には、特定の波長に感度を有した受光部が存在してもよい。
また、本発明のカメラは、上述した何れかの結像状態検出装置を焦点検出装置として内蔵する。
さらには、本発明の受光ユニットは、上述した結像状態検出装置における前記マイクロレンズアレイと受光部アレイとを有する。
結像状態検出装置をカメラの焦点検出装置として使用する場合、上記予定焦点面は、結像光学系を介して被写体を撮像する撮像装置の撮像面と光学的に等価な面である。図19の焦点検出装置は、結像光学系の予定焦点面181から所定距離だけ離れた位置に設けられ、所定ピッチで配列された複数のマイクロレンズ182,183と、複数の光電変換素子を有するとともに、この複数の光電変換素子をマイクロレンズ182,183のそれぞれに対応して配置した一対の光電変換素子アレイ184,185を有する。
尚、図を簡潔にするため、部分瞳の数を上述の値としているが、これに限るものではない。
[第1実施形態]
次に、図1、図2、図3、図4、図5、図6、図7、図8、図9、図10、図11、図23、図24、図25、図26、図27を参照して本発明の第1実施形態を説明する。本実施形態は、本発明の一実施の形態による結像状態検出装置(例えば焦点検出装置)を搭載した電子カメラシステムの実施形態である。先ず、電子カメラシステムの構成を説明する。
撮影レンズ100内には、被写体からの光束(被写体光束)を結像するレンズ群1、開口絞り2、駆動機構3などが備えられる。カメラ本体200内には、撮影レンズ100の光軸上に、クイックリターンミラー13が配置される。
クイックリターンミラー13とシャッター11との間には、サブミラー14が配置され、そのサブミラー14の反射側に、焦点検出ユニット5が配置されている。なお、電子カメラシステムを銀塩フイルムを使用するカメラシステムにする場合は、撮像素子12の代わりにフイルムを配置すればよい。
焦点調節の指示が入力されると、カメラ本体200内のマイクロプロセッサ9は、焦点検出ユニット5を駆動して焦点検出を行う。このとき、焦点検出ユニット5は、撮影レンズ100からの被写体光束の少なくとも1部に基づき、撮影レンズ100のデフオーカス量の情報を含む信号を取得し、マイクロプロセッサ9に送出する。焦点検出ユニット5の詳細は後述する。マイクロプロセッサ9は、その信号に基づきデフオーカス信号を生成し、そのデフオーカス信号を撮影レンズ100内の駆動機構3に与える。駆動機構3は、そのデフオーカス信号に基づいて、撮影レンズ100内の所定のレンズ群を変位させて焦点調節を行う。
次に、焦点検出ユニット5の構成を詳しく説明する。
像高の高い部分の光線を用いて焦点検出する場合に、光路中(予定焦点面5aの近傍からマイクロレンズの間)にフィールドレンズ51を挿入し、像高の高い部分の光線を光軸方向へ曲げるようにしてもよい。以下では、フィールドレンズ51を無視して説明する。
図3(A),(B)に示すように、マイクロレンズアレイ52には、複数の正のパワーを持つマイクロレンズ521−1〜521−12が、所定方向(図では左右方向)に所定ピッチで配置される。ラインセンサアレイ53は、マイクロレンズ521−1〜521−12のそれぞれに対応してラインセンサ531−1〜531−12を備えており、各ラインセンサ531−1〜531−12はそれぞれ同数の光電変換素子を有する。
この焦点検出ユニット5においては、互いに隣接するマイクロレンズ521の間のクロストーク(漏れ光の入射)を防ぐために、図3(A)に符号54で示したような遮光壁が設けられてもよい。
図4に示すように、個々のラインセンサ531内の光電変換素子531A,531B,531D,・・・は、撮影レンズ100の瞳上の互いに異なる部分瞳A,B,C,D,・・・を個別に通過した光束を個別に受ける。これは、全てのラインセンサ531内の光電変換素子について当てはまる。
図6は、マイクロレンズ521による予定焦点面5aとラインセンサ531との結像関係(共役関係)を説明する図である。本焦点検出ユニット5では、図6(A)に示すように、予定焦点面5a上の1点がラインセンサ531上の1点にボケ無く結像される必要は無い。むしろ、図6(B)、(C)に示すように、若干のボケのある方が好ましい。以下、本焦点検出ユニット5に適したボケの程度について説明する。
図7(A)に示すように、ボケていないと、1つの光電変換素子でしか点像を検出しないので、点像の位置が僅か(1画素の幅寸法以下)にずれただけでは、光電変換素子の出力信号には変化が生じ無い。
以上説明した理由により、本焦点検出ユニット5においては、個々のマイクロレンズ521、予定焦点面5a、及びラインセンサ531の関係は、このような適当なボケが生じるように、適当な量だけ共役関係からのずれが与えられる。
次に、上述した焦点検出ユニット5の具体例を説明する。
図8は、撮影レンズ100の検出につかえるF値(通常は開放F値)が「4」であるときの焦点検出ユニット5の具体例を示す図である。なお、図8では、複数のラインセンサ531及び複数の検出領域Eの互いに対応するもの同士に、互いに同じ識別番号i,(i+1),(i+2),(i+3),・・・を付した。
・マイクロレンズ521の径(有効径)A:50μm
・マイクロレンズ521の配置ピッチP:75μm
・予定焦点面5aからマイクロレンズアレイ52までの距離L:1200μm
・ラインセンサ531内の光電変換素子数Tn:12
・光電変換素子像の画素ピッチP d:25μm
図8では、互いに隣接する検出領域E−i,E−(i+1)のずれ量をPで表している。このずれ量は、マイクロレンズ521の配置ピッチに相当する長さである。焦点検出ユニット5では、長さP内に、逆投影像における光電変換素子の像が3個存在している。言い換えると、マイクロレンズ1ピッチあたりに1/3のピッチで(すなわち、3倍の分解能で)焦点検出信号が得られる。
次に、この焦点検出ユニット5を用いたカメラにおいて、撮影レンズ100のF値が「4」から「8」に変更された場合を説明する。
図9は、撮影レンズ100のF値が「8」であるときの焦点検出ユニット5の具体例を示す図である。
このとき、互いに隣接する検出領域E−i,E−(i+1)の重複幅D内には、光電変換素子の逆投影像が3つ存在する。したがって、互いに隣接するラインセンサ531−i,531−(i+1)は、予定焦点面5a上で互いに3画素分の重複する領域を持つことができる。この場合、後述の第1のサンプリング方法を用いる計算では、相関を取れる画素が4画素に足りず、精度が十分でない場合もある。しかしながら、この場合でも、後述の第2のサンプリング方法を用いた計算を行えば、有効な焦点検出演算ができる。
図10は、撮影レンズ100のF値が「4」であるときのラインセンサ上の像のずれる様子を説明する図である。
一方、撮影レンズ100により予定焦点面5aからずれた面に被写体の像Iが形成されたときにも、互いに隣接する2つのラインセンサ531−i,531−(i+1)は、像Iの二次像を検出することができる。その二次像は、図11の下部に矢印で示すように、予定焦点面上に像Iが形成されているときと比較してそれぞれ横方向に、すなわち、素子の並び方向へずれる。その横ずれ量は、デフォーカス量に応じた量である。
なお、被写体の像によっては、特定の位置に配置された2つのラインセンサ531−i,531−(i+1)の出力信号から二次像の横ずれを検出できない場合もある。その場合には、配置箇所の異なる2つのラインセンサ531−j,531−(j+1)の出力信号を利用すれば、マイクロプロセッサ9は確実にデフオーカス量を計算することができる。たとえば、図11の場合、2つのラインセンサ531−(i+1),531−(i+2)を用いてもよい。
―第1のサンプリング方法―
第1のサンプリング方法では、マイクロレンズ521のピッチPよりも細かいピッチにて第1信号列{a(i)}と第2信号列{b(i)}を抽出することが可能である。すなわち、図23に示すように、マイクロレンズ521−1に対応するラインセンサ531−1の複数の光電変換素子から第1信号列{a(i)}={a(1)、a(2)、・・・、a(8)、・・・}を形成し、マイクロレンズ521−2に対応するラインセンサ531−2の複数の光電変換素子から第2信号列{b(i)}={b(1)、b(2)、・・・、b(8)、・・・}を形成する。
―第2のサンプリング方法―
第2のサンプリング方法では、第1信号列{a(i)}と第2信号列{b(i)}とを抽出するために、図25に示すように、マイクロレンズ521−1に対応するラインセンサ531−1の複数の光電変換素子の出力信号の中から信号a(1)を抽出し、以下マイクロレンズ521−2〜521−6のそれぞれに対して、信号a(1)に対応する信号a(2)〜a(6)を抽出して、第1信号列{a(i)}={a(1)、a(2)、・・・、a(6)}を形成する。同様にして、ラインセンサ531−1〜531−6の光電変換素子の出力信号の中で第1信号列{a(i)}として抽出されなかった出力信号から第2信号列{b(i)}={b(1)、b(2)、・・・、b(6)}を形成する。図25の焦点検出面5aにおける同一の像による信号出力を表す第1信号列{a(i)}および第2信号列{b(i)}の対応関係は、a(1)=b(3)、a(2)=b(4)、a(3)=b(5)、a(4)=b(6)、・・・である。
図25に示す第1信号列{a(i)}と第2信号列{b(i)}(i=1,2,・・・)の組み合わせから、一対の像(信号列)の相関量C(N)を以下の式(1)より求める。

式(1)により離散的に算出された相関量C(N)を用いてシフト量Naを求める。シフト数Nのときに極小値を与える相関量をC0、シフト数(N−1)における相関量をCr、シフト数(N+1)における相関量をCfとして、シフト量Naは、以下の式(2)〜(4)により算出される。
DL=0.5×(Cr−Cf) ・・・(2)
E=MAX{Cf−C0、Cr−C0} ・・・(3)
Na=N+DL/E ・・・(4)
式(4)に焦点検出面の位置に応じた補正量Constを加えることにより、焦点検出面上での像ずれ量Δnを式(5)により算出する。
Δn=Na+Const ・・・(5)
この像ずれ量Δnを利用して、デフオーカス量Dfを式(6)を用いて算出できる。
Df=Kf×Δn ・・・(6)
なお、Kfは検出開角に依存した定数である。
図27に示すフローチャートを用いて、焦点検出ユニット5による像ずれ検出動作を説明する。なお、このフローチャートに示す各処理は、マイクロプロセッサ9によりプログラムを実行して行われる。また、このフローチャートは操作釦16を操作することにより開始される。
ステップS2においては、判定基準に応じて第1のサンプリング方法または第2のサンプリング方法を選択する。第1のサンプリング方法が選択された場合はステップS3へ進み、第2のサンプリング方法が選択された場合はステップS4へ進む。なお、判定基準は、たとえばデフオーカス量に基づく基準であり、デフオーカス量が所定値を越える場合は第2のサンプリング方法を選択し、デフオーカス量が所定値以内の場合は第1のサンプリング方法を選択するようにする。
なお、以上の処理手順は、撮影レンズ100のF値に応じて選択された複数のラインセンサ531から出力される信号に対して実行される。
(1)マイクロプロセッサ9は、撮影レンズ100が明るい(F値が小さい)ときほど高精度に焦点検出をすることができる。
(2)本実施形態の焦点検出ユニット5は、予定焦点面5a上の互いにずれた検出領域Eを、多数のマイクロレンズ521及びラインセンサ531が分担して検出するので、仮に、従来の瞳分割再結像方式(特許文献1など)の逆投影像における素子のピッチPdを同じに設定したとしても、予定焦点面5aからマイクロレンズ521までの距離Lを、従来の瞳分割再結像方式(特許文献1など)のそれよりも短縮することができる。つまり、本実施形態の焦点検出ユニット5は、高精度でありながら小型化が容易である。
(3)本実施形態の焦点検出ユニット5においては、マイクロレンズアレイ52の形成された光学部材とラインセンサアレイ53とが近接するので、両者の位置合わせが容易かつ高精度であり、その結果、誤差によるバラツキが減って、焦点検出精度が高精度であるという利点もある。
(4)本実施形態の焦点検出ユニット5には、複数のラインセンサ531をライン方向に配列してなるラインセンサアレイ53が用いられたが、ラインセンサアレイ53の代わりに、それら複数のラインセンサ531を連結してできる1本のラインセンサが用いられてもよい。
なお、本実施形態の焦点検出ユニット5を次のように変形することができる。
(1)上述した焦点検出ユニット5を利用して、撮影レンズ100の絞り込み像面移動量を、電子カメラシステムが自己検出することも可能になる。すなわち、マイクロプロセッサ9は、焦点検出ユニット5の互いに隣接する4つのラインセンサ531−i,531−(i+1),531−(i+2),531−(i+3)のうち、外側の2つのラインセンサ531−i,531−(i+3)を利用して認識したデフオーカス量と、中央部で隣接する2つのラインセンサ531−(i+1),531−(i+2)を利用して認識したデフオーカス量との差異を求める。この差異によって、マイクロプロセッサ9は、撮影レンズ100の絞り込み像面移動量を認識することができる。絞り込み像面移動量とは、F値を「4」から「8」へと変化させたときの撮影レンズ100の焦点面のずれ量である。その情報を利用すれば、マイクロプロセッサ9は、より高精度な焦点調節を行うことができる。
(2)本実施形態のマイクロプロセッサ9は、撮影レンズ100に設定中のF値に応じて出力信号の参照元となるラインセンサ531を変更したが、撮影レンズ100に設定予定のF値(露光時の制御F値)に応じて出力信号の参照元となるラインセンサ531を変更してもよい。
(3)本実施形態のマイクロプロセッサ9は、撮影レンズ100に設定中のF値、及び/又は撮影レンズ100に設定予定のF値に応じて、デフオーカス信号を生成するための演算の内容を変更してもよい。
(4)第1実施形態の焦点検出ユニット5においては、焦点検出の精度を向上させるために、マイクロレンズアレイ52及びラインセンサアレイ53からなる光学系を、2方向に亘って配列することが望ましい。つまり、第1方向に配列されたラインセンサアレイを持つマイクロレンズアレイと、第2方向に配列されたラインセンサアレイを持つマイクロレンズアレイとを備えてもよい。
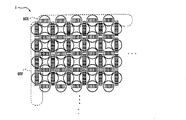
すなわち、図12の焦点検出ユニット5は、第1方向に配列された複数の光電変換素子(受光部)で構成される受光部群601、および、ひとつの受光部群601に光束を導くマイクロレンズ602で構成される第1検出光学系60Xを複数備える。また、第2方向に配列された複数の光電変換素子で構成される受光部群611、および、ひとつの受光部群611に光束を導くマイクロレンズ612で構成される第2検出光学系60Yを複数備える。そして、これら複数の第1および第2検出光学系60X,60Yを互い違いの市松状に配置して構成される。
また、第1の光学系60X及び第2の光学系60Yが複数個ずつ密に配置されれば、予定焦点面5a上の検出領域の配置密度は高まり、被写体のいろいろな部分で焦点検出が可能となる。
(5)図12に示す配列を、図13に示すように変形することもできる。図13に示す焦点検出ユニット5においては、第1方向のラインセンサアレイ53よりも第2方向のラインセンサアレイ53の長さが長くなるように設けられている。二方向に配列されたラインセンサ53において、双方のラインセンサ53が干渉しないように一方向の長さを長くすることにより、F値の小さい明るいレンズに対する検出能力を増大させることができる。
(6)さらに、図12に示す配列を、図14に示すように変形することもできる。図14に示す焦点検出ユニット5においては、第1方向の配列ピッチP1と第2方向の配列ピッチP2とが異なるように設けられている。この場合、マイクロレンズの配列ピッチP1が小さく、密に並んだ方向の検出精度の向上が期待できる。
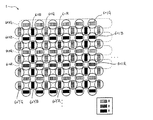
(7)上述した実施形態では、焦点検出ユニット5の分光感度については特に言及しなかったが、焦点検出ユニット5に分光感度特性を付与してもよい。図15は、分光感度特性を持つ焦点検出ユニット5の正面図である。図15においては、R(赤),G(緑),B(青)の3色の各々に感度を持つ3種類の光学系60XR,60XG,60XBが複数個ずつX方向に並べられるとともに、R(赤),G(緑),B(青)の3色の各々に感度を持つ3種類の光学系60YR,60YG,60YBが複数個ずつX方向に並べられている。
なお、図では、光学系60XB、60YB内のラインセンサが黒く塗りつぶされているが、実際には、このラインセンサにも複数の光電変換素子が配列されている。
(8)図15においては、可視光の3色に感度を持つ3種類の光学系60XR,60XG,60XBと60YR,60YG,60YBが配列されているが、可視光に感度を持つ光学系と、可視光及び赤外光に感度を持つ光学系との2種類を用意し、それらを配列してもよい。
(9)図15に示した焦点検出ユニット5の光学系60XR,60XG,60XBと60YR,60YG,60YBは、それぞれ1種類の色(波長)しか検出しないが、図16又は図17に示すように、1種類の光学系が2種類以上の色(波長)を検出できるように構成されてもよい。
尚、G色としては、通常のイメージセンサのG感度分布より広く取る。例えば、視感度分布程度あるいはそれよりもさらに広い程度に取ると、光量の点で有利となり、好ましい。
(10)以上の焦点検出ユニット5においては、横方向にマイクロレンズアレイ52及びラインセンサアレイ53を並べた第1の光学系と、縦方向にマイクロレンズアレイ52及びラインセンサアレイ53を並べた第2の光学系とが交互に配置されたが、必ずしも交互でなくてよい。
(11)図18には、第1の光学系を密に配列したブロック70Xと、第2の光学系を密に配列したブロック70Yとを、ブロック交互に配置してなる焦点検出ユニット5を示した。
(12)上記説明ではマイクロレンズ毎に光電変換素子アレイを設けたが、1列に並ぶこれらの複数の光電変換素子アレイをまとめて、1本の光電変換素子アレイとしてもよいし、複数の光電変換素子アレイを2次元撮像素子で実現するように構成してもよい。又、図12〜図18の二次元配置は、これを面内に任意角度、例えば45°回転した配置にしてもよい。
(13)上述した実施形態では、結像状態検出装置(焦点検出装置)を搭載した電子カメラシステムを説明したが、本発明の実施形態による結像状態検出装置は、結像光学系を有した他の光学機器、例えばフィールドスコープなどの各種結像光学装置にも同様に搭載可能である。
(14)本発明の実施の形態による結像状態検出装置は、光学系の収差測定に適用することもできる。本発明の実施の形態による結像状態検出装置で被検光学系の瞳部分に依存したデフォーカス量や各像高におけるデフォーカス量をそれぞれ測定すれば、結果的にその被検光学系の収差が求まるからである。本発明の実施の形態による結像状態検出装置を適用した収差測定装置には、例えば、被検光学系を支持する機構と、被検光学系に対し物体側から測定光を投光する照明光学系と、被検光学系の像側に配置された本発明の実施の形態による結像状態検出装置と、結像状態検出装置の出力から被検光学系の収差を算出する演算装置とが備えられる。
Claims (15)
- 結像光学系の予定焦点面からずれた面に所定ピッチで配列された複数のマイクロレンズを有するマイクロレンズアレイと、
前記マイクロレンズアレイを構成する複数のマイクロレンズの後側へ個別に設けられた複数の受光部アレイと、
或るマイクロレンズに設けられた受光部アレイの光電変換出力から第1信号列{a(i);i=1,2,3,4,・・・}を作成すると共に、別のマイクロレンズに設けられた受光部アレイの光電変換出力から第2信号列{b(i);i=1,2,3,4,・・・}を作成する第1作成手段と、
i番目のマイクロレンズに設けられた受光部アレイのうち所定位置に配置された2つの受光部の光電変換出力から信号a(i),b(i)を抽出する処理を、複数のマイクロレンズについてそれぞれ行い、第1信号列{a(i);i=1,2,3,4,・・・}及び第2信号列{b(i);i=1,2,3,4,・・・}を作成する第2作成手段と、
前記第1作成手段が作成する1対の信号列と、前記第2作成手段が作成する1対の信号列とのうち一方を所定の判断基準で選択し、選択された1対の信号列が表す1対のパターンの間のズレ量により、前記結像光学系の前記予定焦点面における結像状態を検出する結像状態演算手段と
を備えることを特徴とする結像状態検出装置。 - 請求項1に記載の結像状態検出装置において、
前記受光部アレイを前記予定焦点面上に逆投影した場合に形成される受光部像の配列ピッチPdは、前記マイクロレンズの配列ピッチPよりも小さい。 - 請求項1または請求項2に記載の結像状態検出装置において、
前記マイクロレンズの配列ピッチをP、前記結像光学系の部分瞳から1つの受光部へ入射する光束のF値をFP 、前記結像光学系の瞳の分割数をQとしたとき、前記マイクロレンズアレイの配置面から前記予定焦点面までの距離Lは、次式を満たす。
P×FP > L ≧ P×FP/(Q−4) - 請求項1〜請求項3のいずれか一項に記載の結像状態検出装置において、
前記複数の受光部アレイの中には、受光部の配列方向が第1方向である複数の第1受光部アレイと、受光部の配列方向が前記第1方向とは異なる第2方向である複数の第2受光部アレイとが存在する。 - 請求項4に記載の結像状態検出装置において、
前記複数の第1受光部アレイを個別に設けた複数のマイクロレンズと、前記複数の第2受光部アレイを個別に設けた複数のマイクロレンズとは、市松模様に配置される。 - 請求項4に記載の結像状態検出装置において、
前記複数の第1受光部アレイと前記複数の第2受光部アレイとは、市松模様に配置される。 - 請求項4に記載の結像状態検出装置において、
前記第1受光部アレイを設けたマイクロレンズの配列ピッチと、前記第2受光部アレイを設けたマイクロレンズの配列ピッチとは、互いに異なる。 - 請求項4に記載の結像状態検出装置において、
前記第1受光部アレイのアレイ方向の長さと、前記第2受光部アレイのアレイ方向の長さとは、互いに異なる。 - 請求項1〜請求項8のいずれか一項に記載の結像状態検出装置において、
前記複数の受光部アレイの中には、互いに異なる分光感度特性を有した複数種類の受光部が存在する。 - 請求項4に記載の結像状態検出装置において、
前記複数の第1受光部アレイの中には、互いに異なる分光感度特性を有した複数種類の第1受光部アレイが存在する。 - 請求項9に記載の結像状態検出装置において、
前記複数種類の受光部のうち、特定の分光感度特性を有した特定種類の受光部は、他の分光感度特性を有した他種類の受光部よりも高密度に配列される。 - 請求項10に記載の結像状態検出装置において、
前記複数の第1受光部アレイ及び前記複数の第2受光部アレイの各々の中には、特定の波長に感度を有した受光部が存在する。 - 請求項11または請求項12に記載の結像状態検出装置において、
互いに異なる分光感度特性を有した複数種類の受光部の間では、互いの大きさが異なる。 - 請求項1〜請求項13のいずれか一項に記載の結像状態検出装置を焦点検出装置として内蔵するカメラ。
- 請求項1〜請求項13のいずれか一項に記載の結像状態検出装置における前記マイクロレンズアレイと前記受光部アレイとを有する受光ユニット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006150686A JP4788481B2 (ja) | 2005-05-30 | 2006-05-30 | 結像状態検出装置、カメラ、及び受光ユニット |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005157314 | 2005-05-30 | ||
| JP2005157314 | 2005-05-30 | ||
| JP2006150686A JP4788481B2 (ja) | 2005-05-30 | 2006-05-30 | 結像状態検出装置、カメラ、及び受光ユニット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007011314A JP2007011314A (ja) | 2007-01-18 |
| JP2007011314A5 JP2007011314A5 (ja) | 2009-06-04 |
| JP4788481B2 true JP4788481B2 (ja) | 2011-10-05 |
Family
ID=37749837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006150686A Expired - Fee Related JP4788481B2 (ja) | 2005-05-30 | 2006-05-30 | 結像状態検出装置、カメラ、及び受光ユニット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4788481B2 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006129677A1 (ja) | 2005-05-30 | 2006-12-07 | Nikon Corporation | 結像状態検出装置 |
| JP5034556B2 (ja) | 2007-02-27 | 2012-09-26 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP4973273B2 (ja) * | 2007-03-28 | 2012-07-11 | 株式会社ニコン | デジタルカメラ |
| JP4821674B2 (ja) * | 2007-03-28 | 2011-11-24 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5191168B2 (ja) * | 2007-06-11 | 2013-04-24 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP4995002B2 (ja) * | 2007-08-21 | 2012-08-08 | 株式会社リコー | 撮像装置、合焦装置、撮像方法および合焦方法 |
| EP2028843B1 (en) | 2007-08-21 | 2013-10-23 | Ricoh Company, Ltd. | Focusing device and imaging apparatus using the same |
| WO2009044776A1 (ja) | 2007-10-02 | 2009-04-09 | Nikon Corporation | 受光装置、焦点検出装置および撮像装置 |
| JP5061858B2 (ja) | 2007-11-12 | 2012-10-31 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5380857B2 (ja) * | 2008-02-21 | 2014-01-08 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5130178B2 (ja) * | 2008-03-17 | 2013-01-30 | 株式会社リコー | 焦点距離検出装置及び撮像装置及び撮像方法及びカメラ |
| JP2010008873A (ja) | 2008-06-30 | 2010-01-14 | Nikon Corp | 焦点検出装置および撮像装置 |
| JP5272565B2 (ja) * | 2008-08-05 | 2013-08-28 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP5617157B2 (ja) | 2008-08-20 | 2014-11-05 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| EP2642260A4 (en) * | 2010-11-16 | 2015-12-09 | Nikon Corp | MULTIBAND CAMERA AND MULTIBAND IMAGING PROCESS |
| JP5240591B2 (ja) * | 2011-06-27 | 2013-07-17 | 株式会社リコー | 撮像装置、合焦装置、撮像方法および合焦方法 |
| JP5942697B2 (ja) * | 2012-08-21 | 2016-06-29 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP6476547B2 (ja) * | 2014-01-28 | 2019-03-06 | 株式会社ニコン | 焦点検出装置および撮像装置 |
| JP2014149535A (ja) * | 2014-03-03 | 2014-08-21 | Nikon Corp | 光学系調整方法および装置 |
-
2006
- 2006-05-30 JP JP2006150686A patent/JP4788481B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007011314A (ja) | 2007-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4788481B2 (ja) | 結像状態検出装置、カメラ、及び受光ユニット | |
| WO2006129677A1 (ja) | 結像状態検出装置 | |
| US7767946B2 (en) | Focus detection device and image pick-up device | |
| JP6202927B2 (ja) | 距離検出装置、撮像装置、プログラム、記録媒体および距離検出方法 | |
| JP5161702B2 (ja) | 撮像装置、撮像システム、及び焦点検出方法 | |
| EP2651118B1 (en) | Light receiving device, focus detection device and imaging device | |
| US20080205871A1 (en) | Focus detection device for image forming optical system, imaging apparatus, and focus detection method for image forming optical system | |
| JP5157128B2 (ja) | 焦点検出装置および撮像装置 | |
| WO2010021195A1 (ja) | 焦点検出装置 | |
| JP4054422B2 (ja) | カメラ及び交換レンズ装置 | |
| JP2009198771A (ja) | 焦点検出装置および撮像装置 | |
| JP4802864B2 (ja) | 焦点検出装置および撮像装置 | |
| JP2009151154A (ja) | 受光素子、焦点検出装置および撮像装置 | |
| JP4208536B2 (ja) | 焦点検出装置、それを有する撮像装置、及び撮影レンズ | |
| JP2009294301A (ja) | 受光装置および焦点検出装置 | |
| JP2009128438A (ja) | カメラの焦点検出装置 | |
| JP5493640B2 (ja) | 焦点検出装置、および、撮像装置 | |
| JP2000258683A (ja) | 焦点検出装置及び測距装置 | |
| JP4566804B2 (ja) | ファインダー内表示装置及びそれを有するカメラ | |
| JP2009192882A (ja) | 焦点検出装置および撮像装置 | |
| JP4289707B2 (ja) | 焦点検出装置 | |
| JP4514202B2 (ja) | 交換レンズ及びカメラ本体及びカメラシステム | |
| JP2011043670A (ja) | 焦点検出装置および撮像装置 | |
| JP2006065070A (ja) | 焦点検出装置及び焦点検出方法 | |
| JP2011242666A (ja) | 焦点検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090319 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090417 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110314 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110621 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110704 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4788481 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |